共轴球面光学系统
- 格式:ppt
- 大小:1.23 MB
- 文档页数:7

共轴球面系统成像的原理
共轴球面系统(Spherical Coordinate Imaging,SCI)是一种用于成像的技术,其原理基于球面坐标系的数学模型,将空间中的点用三个参数(径向距离、角度和极角)来描述,即r(径向距离)、θ(角度)和φ(极角)。
共轴球面系统成像的原理如下:
1. 首先,将待成像区域划分为一系列小单元,每个小单元对应一个球面坐标系上的点。
2. 对于每个小单元,通过探测器阵列采集其反射或散射的光线,并将其转化为电信号。
3. 将每个小单元对应的球面坐标转化为直角坐标系中的坐标点,并将其输入到图像处理系统中。
4. 图像处理系统根据每个坐标点的位置和亮度信息,计算出其在图像中的像素值,并将其输出到显示器上,从而得到共轴球面系统的成像结果。
共轴球面系统成像的优点在于能够提供比传统成像技术更为全面和详细的图像信息,特别是在对复杂目标的成像方面具有优势。
此外,
共轴球面系统成像还具有高分辨率、高信噪比和低失真率等优点,因此在医学成像、工业检测、天文观测等领域得到了广泛应用。


共轴球面光学系统特点
共轴球面光学系统是一种采用球面反射镜的光学系统,它由一个球面
反射镜和一个准直物镜组成,它可以聚焦起一束高度集中的光束来实现观
测或其他应用目的。
共轴球面光学系统能够提供高度集中的光束,使其能
够在极短的像差范围内获得高质量的图像,在科学、工业、医学、检测等
领域有着广泛的应用。
其主要特点有:
1、透射特性卓越:由于共轴球面光学系统采用的球面反射镜是镀铬
或钎焊的,具有良好的光学性能,其较高的反射率可以使光的各种波长的
透射率都达到较高的水平。
2、聚焦效果好:由于共轴球面光学系统采用的设计原理是根据透镜
来实现聚焦,因此可以较好的实现视野的高度放大,使其能够有效聚焦。
3、维护方便:共轴球面光学系统采用的是球面反射镜,它只需要定
期清洁即可,而且它没有润滑要求,所以维护非常方便。
4、耐用性强:共轴球面光学系统采用的是优质的、耐用的球面反射镜,可以保证长期使用的稳定性,耐用性也很强。
5、体积小:共轴球面光学系统采用的是非折射性镜片,所以体积小,可以更容易地应用于有空间限制的系统中。
共轴球面系统是一种通过两个球面透镜组合在一起形成的光学系统。
在共轴球面系统中,两个球面透镜的曲率半径和相对位置都对系统的成像性能产生重要影响。
本文将重点讨论共轴球面系统中主平面和焦点位置的计算方法。
一、共轴球面系统主平面的计算在共轴球面系统中,由于两个球面透镜的共轴排列,主平面的计算相对较为复杂。
在实际计算中,可以采用以下步骤进行推导和计算:1. 根据两个球面透镜的曲率半径R1和R2,以及两个球面透镜的相对位置d,首先计算出两个球面透镜之间的等效焦距Feq。
等效焦距Feq的计算公式为:Feq = (R1 * R2) / ((n - 1) * d)其中,n为介质的折射率。
2. 接下来,根据等效焦距Feq和两个球面透镜的位置,计算出主平面的位置H。
主平面的位置H的计算公式为:H = d * (Feq - (R1 + R2)) / Feq3. 根据主平面的位置H和两个球面透镜的位置,计算出主平面的曲率半径R。
主平面的曲率半径R的计算公式为:R = Feq * (1 + (H / d))通过以上步骤的计算,可以得到共轴球面系统中主平面的位置和曲率半径,为系统的设计和分析提供了重要的参数。
二、共轴球面系统焦点位置的计算在共轴球面系统中,焦点位置的计算也是系统设计和分析中的重要一环。
在实际计算中,可以采用以下步骤进行推导和计算:1. 根据两个球面透镜的曲率半径R1和R2,以及两个球面透镜的相对位置d,计算出系统的等效焦距。
系统的等效焦距F的计算公式为:F = (R1 * R2) / ((n - 1) * d)2. 根据等效焦距F和两个球面透镜的位置,计算出系统的合焦位置。
系统的合焦位置的计算公式为:S = F * (1 - (d / Feq))通过以上步骤的计算,可以得到共轴球面系统的焦点位置,为系统的成像性能和光学设计提供了重要的参数。
结论共轴球面系统的主平面和焦点位置的计算是系统设计和分析中的关键步骤。
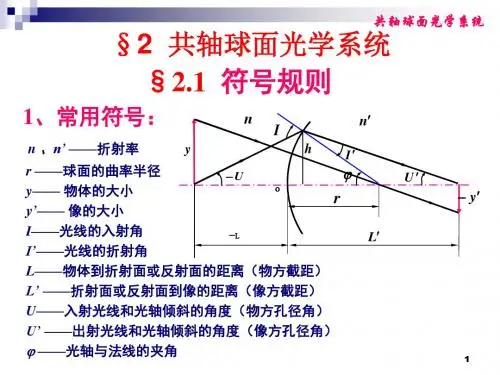
第二章共轴球面光学系统第一节符号规则●常见的光学系统有多个光学零件组成,每个光学零件往往由多个球面组成●这些球面的球心在一条直线上即为“共轴球面系统”●这条直线称为“光轴”●折射球面的结构参数:曲率半径r、物方折射率n、像方折射率n'●入射光线的参数:物方截距L、物方孔径角U●像方量在相应的物方量字母旁加“ ’ ”区分●光线的传播方向为自左向右●规定符号规则如下:●1)沿轴线段(如L、L’和r)●以顶点为原点,与光线方向相同为正,相反为负●2)垂轴线段(如h、y和y’)●以光轴为基准,光轴以上为正,以下为负●3)光线与光轴的夹角(如U、U’)●光轴转向光线;角量均以锐角计、顺时针为正、逆时针为负●4)光线与法线的夹角(如I、I’、I”)●光线转向法线●5)光轴与法线的夹角(如φ)●光轴转向法线●6)折射面间隔d●前一面顶点到后一面顶点,与光线方向相同为正,相反为负;在折射系统中,d恒为正●物方截距、像方截距、物方孔径角、像方孔径角等物理量是可以有正负的,但作为几何量AO、OA’、∠EAO、∠EA’O等应为正值;在负值物理量前加负号,以保证相应几何量为正●根据物像的位置判断物像的虚实●负(正)物距对应实(虚)物●正(负)像距对应实(虚)像第二节物体经过单个折射球面的成像1,单球面成像的光路计算已知折射球面的结构参数曲率半径r ,物方折射率n ,像方折射率n ’已知入射光线AE 的参数物方截距L ,物方孔径角U (轴上物点)求出射光线参数像方截距L ’,像方孔径角U ’(轴上像点)光路计算2在ΔAEC 中用正弦定律,有 sin sin()I U r L r -=-导出求入射角I 的公式sin sin L r I U r -=(2-1)由折射定律可以求得折射角I ’sin sin n I I n '=='(2-2)由角度关系,可以求得像方孔径角U ’U U I I ''=+-(2-3) 在ΔA ’EC 中应用正弦定律,得像方截距L ’ sin sin I L r r U ''=+' (2-4)式(2-1)至(2-4)就是子午面内实际光线的光路计算公式,利用这组公式可以由已知的L 和U 求L ’和U ’ sin sin L r I U r -= sin sin n I I n '=='U U I I ''=+-sin sin I L r r U ''=+'当物点A 位于轴上无限远处时,相应的L=∞,U=0,则式(2-1)须改变为sin hI r =(2-5)●若L 是定值,L ’是U 的函数,即从同一点发出的光线,孔径角不同,将在像方交在不同的点上 ● 同心光束经过单球面后不再是同心光束●这种误差被称为“球差” ●球差是各种像差中最常见的一种●如果把孔径角U 限制在很小的范围内,光线距光轴很近,称为“近轴光”,U 、U ’、I 和I ’都很小,式(2-1)~(2-4)中的正弦值用弧度来表示 ● 用小写字母u 、u ’、i 、i ’、l 和l ’表示近轴量● l r i u r n ii n u u i i i l r r u -='='''=+-''=+'(2-6)~(2-9) ● 当入射光线平行于光轴时,也以h 作为入射光线的参数,有●h i r =(2-10) ●近轴光线l ’与u 无关,即当物点位置确定后,其像点位置与孔径角u 无关,物点发出的同心光束经折射后在近轴区仍为同心光束 ●在近轴区成的是完善像,这个完善像通常称为“高斯像” ● 近轴区最常用的物像位置公式●n n n n l l r ''--='(2-14) ●已知物点位置l 求像点位置l ’时(或反过来)十分方便 ●1、轴上物点:轴上同一物点发出的近轴光线,经过球面折射以后聚交一点,即轴上物点近轴成像时是符合理想成像条件的。