系统辨识试验
- 格式:doc
- 大小:184.00 KB
- 文档页数:8
实验一 离散模型的参数辨识一、实验目的1. 掌握随机序列的产生方法。
2. 掌握最小二乘估计算法的基本原理。
3. 掌握最小二乘递推算法。
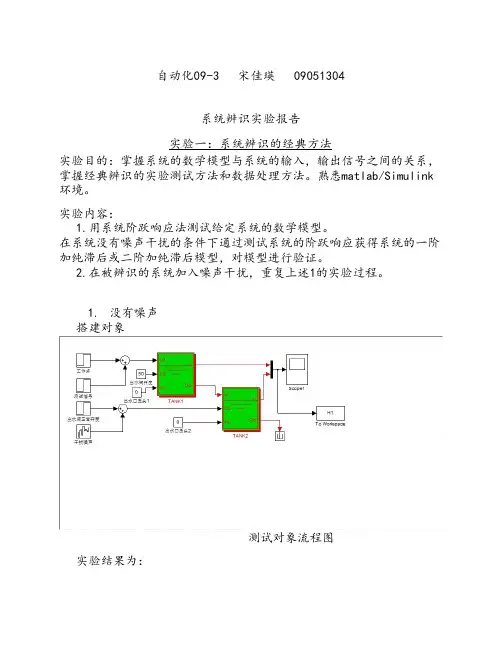
二、实验内容1. 基于Box--Jinkins 模型模拟一个动态过程,动态过程取为各种不同的情况,输入信号采用M 序列,实验者可尝试不同周期的M 序列。
信噪比、观测数据长度也由实验者取为各种不同情况。
2. 模拟生成输入输出数据。
3. 根据仿真过程的噪声特性,选择一种模型参数估计算法,如RLS 、RIV 、RELS 、RGLS 、COR-LS 、STAA 、RML 或MLS 等,估计出模型的参数。
三、实验器材计算机 1台四、实验原理最小二乘法是一种经典的有效的数据处理方法。
它是1795年高斯(K.F.Guass )在预测行星和彗星运动的轨道时提出并实际使用的。
最小二乘法也是一种根据实验数据进行参数估计的主要方法。
这种方法容易被理解,而且由于存在唯一解,所以也比较容易实现。
它在统计学文献中还被称为线性回归法,在某些辨识文献中还被称为方程误差法。
正如各个学科都用到系统辨识技术建立模型一样,最小二乘法也用于很多场合进行参数估计,虽然不一定是直接运用,但很多算法是以最小二乘为基础的。
在系统辨识和参数估计领域中,最小二乘法是一种最基本的估计方法。
它可用于动态系统,也可用于静态系统;可用于线性系统,也可用于非线性系统;可用于离线估计,也可用于在线估计。
在随机的环境下利用最小二乘法时,并不要求知道观测数据的概率统计信息,而用这种方法所获得的估计结果,却有相当好的统计性质。
在系统辨识和参数估计领域中,应用最广泛的估计方法是最小二乘法和极大似然法,而其他的大多数算法都与最小二乘法有关。
最小二乘法采用的模型为11()()()()()A z y k B z u k e k --=+最小二乘估计是在残差二乘方准则函数极小意义下的最优估计,即按照准则函数ˆˆˆˆ()()min T T J ee Y Y ΦθΦθ==--= 来确定估计值ˆθ。
《系统辨识》课程报告题目:最小二乘参数估计法班级:工控08.1姓名:学号:日期:2011.6.1成都信息工程学院控制工程学院最小二乘参数估计摘要:最小二乘法提供了一个估算方法,使之能得到一个在最小方差意义上与实验数据最好拟合的数学模型。
最小二乘的一次性完成辨识算法,他的特点是直接利用已经获得的观测数据进行运算处理。
求出一个使各次实际观测和计算值之间的差值的平方乘以度量其精度的数值以后的和为最小的数值,求出带辨识参数。
最小二乘辩识方法在系统辩识领域中先应用上已相当普及,方法上相当完善,可以有效的用于系统的状态估计,参数估计以及自适应控制及其他方面。
关键词:最小二乘法,AIC 准则,M 序列1 引言:最小二乘法是 1795 年高斯在预测星体运行轨道最先提出的 , 它奠定了最小二乘估计理论的基础 . 到 20 世纪 60 年代瑞典学者 Austron 把这个方法用于动态系统的辨识中 , 在这种辨识方法中 , 首先给出模类型 , 在该类型下确定系统模型的最优参数 .这种具有格式规范的辨识方法可以演绎成递推形式 .递推最小二乘算法计算量小 , 可以用于在线辨识 , 即使辨识对象随时间发生化 , 模型也可以对其进行跟踪断地进行更新和修正辨识参数 , 从而成为一种被广泛采用的辨识方法,最小二乘法有一次完成算法和递推算法,其中 一次完成算法存在一定的局限性,工业系统辨识常采用递推算法进行系统辨识。
2 实验原理:由于运用最小二乘一次完成算法进行系统参数辨识的时候,存在一定的限定条件,并且需要用到全部的观测数据,每采样一次就需要增添一组新的观察数据,所以引入递推最小二乘法来辨识系统参数,递推最小二乘法是用旧的估计值加上修正值得到的新的估计值,用新的测量数据对上一次的估计结果进行修正,直到估计值达到需要的精度为止。
2.1根据汉格尔矩阵估计模型的阶次设一个可观可控的SISO 过程的脉冲响应序列为{个g(1),g(2),……g(L)},可以通过汉格尔(Hankel )矩阵的秩来确定系统的阶次。
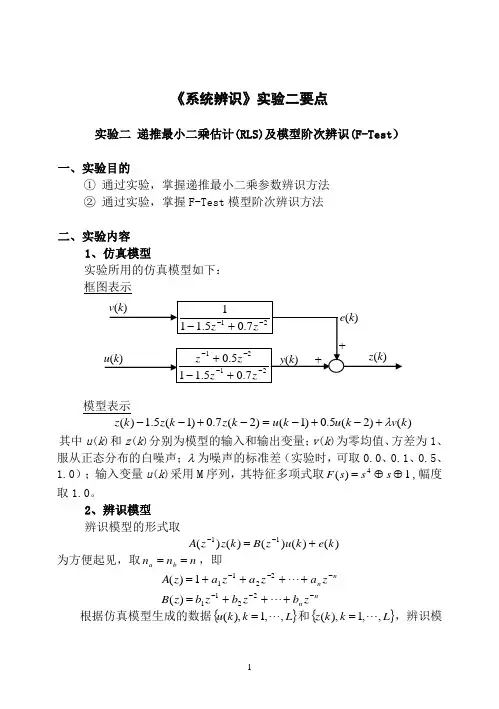
《系统辨识》实验二要点实验二 递推最小二乘估计(RLS)及模型阶次辨识(F-Test )一、实验目的① 通过实验,掌握递推最小二乘参数辨识方法 ② 通过实验,掌握F-Test 模型阶次辨识方法二、实验内容1、仿真模型实验所用的仿真模型如下: 框图表示模型表示)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z λ+-+-=-+-- 其中u (k )和z (k )分别为模型的输入和输出变量;v (k )为零均值、方差为1、服从正态分布的白噪声;λ为噪声的标准差(实验时,可取0.0、0.1、0.5、1.0);输入变量u (k )采用M 序列,其特征多项式取1)(4⊕⊕=s s s F ,幅度取1.0。
2、辨识模型辨识模型的形式取)()()()()(11k e k u z B k z z A +=--为方便起见,取n n n b a ==,即nn nn zb z b z b z B z a z a z a z A ------+++=++++= 22112211)(1)(根据仿真模型生成的数据{}L k k u ,,1),( =和{}L k k z ,,1),( =,辨识模型的参数n n b b b a a a ,,,,,,2121 和;并确定模型阶次n ,同时估计出模型误差)(k e 的方差(应近似等于模型噪声)(k v 的方差,即为2λ)和模型的静态增益K 。
3、辨识算法① 采用递推遗忘因子法:[][][]⎪⎪⎩⎪⎪⎨⎧--=+--=--+-=-)1()()(1)()()1()()()1()()1()()()()1()(1k k k μk μk k k k k k k k k z k k k P h K I P h P h h P K h K τττθθθ 其中,遗忘因子10≤<μ(具体值根据情况自已确定);数据长度L 可取100、300、500;初始值⎩⎨⎧==IP 2)0()0(a εθ。
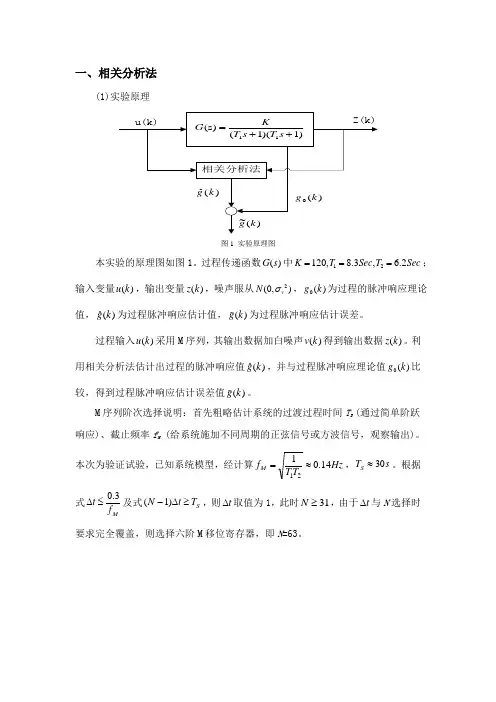
一、相关分析法(1)实验原理图1 实验原理图本实验的原理图如图1。
过程传递函数()G s 中12120,8.3, 6.2K T Sec T Sec ===;输入变量()u k ,输出变量()z k ,噪声服从2(0,)v N σ,0()g k 为过程的脉冲响应理论值,ˆ()gk 为过程脉冲响应估计值,()g k 为过程脉冲响应估计误差。
过程输入()u k 采用M 序列,其输出数据加白噪声()v k 得到输出数据()z k 。
利用相关分析法估计出过程的脉冲响应值ˆ()gk ,并与过程脉冲响应理论值0()g k 比较,得到过程脉冲响应估计误差值()g k 。
M 序列阶次选择说明:首先粗略估计系统的过渡过程时间T S (通过简单阶跃响应)、截止频率f M (给系统施加不同周期的正弦信号或方波信号,观察输出)。
本次为验证试验,已知系统模型,经计算Hz T T f M 14.0121≈=,s T S 30≈。
根据式Mf t 3.0≤∆及式S T t N ≥∆-)1(,则t ∆取值为1,此时31≥N ,由于t ∆与N 选择时要求完全覆盖,则选择六阶M 移位寄存器,即N =63。
(2)编程说明图2 程序流程图(3)分步说明 ① 生成M 序列:M 序列的循环周期63126=-=N ,时钟节拍1t Sec ∆=,幅度1a =,移位寄存器中第5、6位的内容按“模二相加”,反馈到第一位作为输入。
其中初始数据设为{1,0,1,0,0,0}。
程序如下:② 生成白噪声序列: 程序如下:③ 过程仿真得到输出数据:如图2所示的过程传递函数串联,可以写成形如121211()1/1/K Gs TT s T s T =++,其中112KK TT =。
图2 过程仿真方框图程序如下:④ 计算脉冲响应估计值:互相关函数采用公式)()(1)(10k i y i x Nr k R N r i xy +⋅⋅=∑-⋅=,互相关函数所用的数据是从第二个周期开始的,其中r 为周期数,取1-3之间。

2.用普通最小二乘法(OLS )法辨识对象数学模型 选择的仿真对象的数学模型如下)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+--其中,)(k v 是服从正态分布的白噪声N )1,0(。
输入信号采用4阶M 序列,幅度为1。
选择如下形式的辨识模型)()2()1()2()1()(2121k v k u b k u b k z a k z a k z +-+-=-+-+设输入信号的取值是从k =1到k =16的M 序列,则待辨识参数LSθˆ为LS θˆ=L τL 1L τL z H )H H -(。
其中,被辨识参数LSθˆ、观测矩阵z L 、H L 的表达式为 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2121ˆb b a a LSθ , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)16()4()3(z z z L z , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=)14()2()1()15()3()2()14()2()1()15()3()2(u u u u u u z z z z z z LH 程序框图如下所示:参考程序:%olsu=[-1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1]; %系统辨识的输入信号为一个周期的M 序列z=zeros(1,16); %定义输出观测值的长度for k=3:16z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2); %用理想输出值作为观测值endsubplot(3,1,1) %画三行一列图形窗口中的第一个图形stem(u) %画出输入信号u的经线图形subplot(3,1,2) %画三行一列图形窗口中的第二个图形i=1:1:16; %横坐标范围是1到16,步长为1plot(i,z) %图形的横坐标是采样时刻i, 纵坐标是输出观测值z, 图形格式为连续曲线subplot(3,1,3) %画三行一列图形窗口中的第三个图形stem(z),grid on%画出输出观测值z的经线图形,并显示坐标网格u,z%显示输入信号和输出观测信号%L=14%数据长度HL=[-z(2) -z(1) u(2) u(1);-z(3) -z(2) u(3) u(2);-z(4) -z(3) u(4) u(3);-z(5) -z(4) u(5) u(4);-z(6) -z(5) u(6) u(5);-z(7) -z(6) u(7) u(6);-z(8) -z(7) u(8) u(7);-z(9) -z(8) u(9) u(8);-z(10) -z(9) u(10) u(9);-z(11) -z(10) u(11) u(10);-z(12) -z(11) u(12) u(11);-z(13) -z(12) u(13) u(12);-z(14) -z(13) u(14) u(13);-z(15) -z(14) u(15) u(14)] %给样本矩阵HL赋值ZL=[z(3);z(4);z(5);z(6);z(7);z(8);z(9);z(10);z(11);z(12);z(13);z(14);z(15);z(16)]% 给样本矩阵zL赋值%calculating parameters%计算参数c1=HL'*HL; c2=inv(c1); c3=HL'*ZL; c=c2*c3 %计算并显示%DISPLAY PARAMETERSa1=c(1), a2=c(2), b1=c(3), b2=c(4) %从中分离出并显示a1 、a2、 b1、 b2%End注:由于输出观测值没有任何噪音成分,所以辨识结果也无任何误差,同学们可以在输出观测值中添加噪音,观察ols的辨识效果。
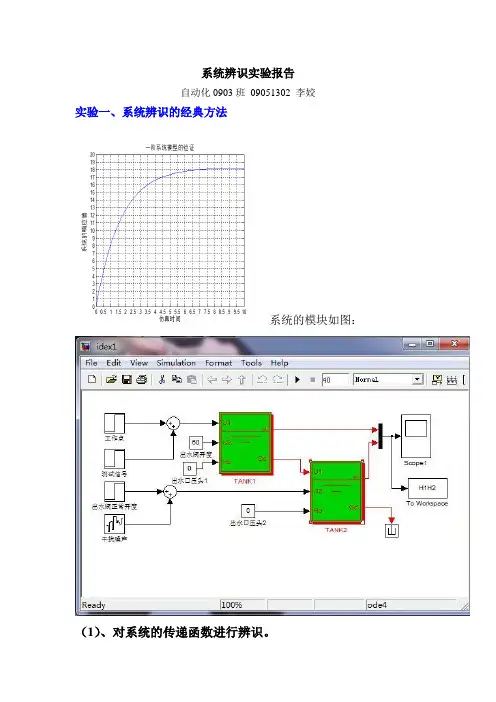
系统辨识实验报告自动化0903班09051302 李姣实验一、系统辨识的经典方法系统的模块如图:(1)、对系统的传递函数进行辨识。
对于一阶系统而言,未加入干扰信号时,其稳定值 t0=20.0,h0=42.2040, 加入干扰信号后其稳定值为 t=40,h1=60.4937。
现在分别取两个点为y1=30%对应的实际点为 h1’=42.2040+(60.4937-42.2040)*30%=47.6909; 根据实际测试值,选取h1’=47.8909,t1’=20.6,对应的 y1’=(47.89*09-42.2040)/(60.4939-42.2040)=0.3109 所以第一个点的取值为 y1’=0.3109;t1’=0.6; 同理可得第二个点的数值为 y2’=0.8033;t2’=2.7; 由公式 :可得 T=1.6750;=0; 由公式可得 k=1.82899(2)、对传递函数进行检验下面对系统的辨识结果进行验证,用一个幅值为10的阶跃信号进行验证,程序如下: num=[1.82899]; den=[1.675,1];()()()()()()2112211212t t T ln 1Y ln 1Y t ln 1Y t ln 1Y ln 1Y ln 1Y -⎧=⎪---⎪⎨---⎪τ=⎪---⎩()y y K u u∞∆==∆∆t=[0:0.1:10];[y,x,t]=step(num,den,t);plot(t,10*y)grid on;title('一阶系统模型的验证');xlabel('仿真时间');ylabel('系统的响应值');set(gca,'xtick',[0:0.5:10]);set(gca,'ytick',[0:1:20]);所得的仿真图形如下,实际系统加入测试信号后0.5s,从workspace中可发现系统的响应值为h=47.0929-42.2040=4.8889;验证是的对应仿真值为h’=4.4720;其误差大小为:(4.8889-4.4720)/4.8889*100%=8.536%;同理,当仿真时间为3.8s时,h=16.3993;h’=16.398;误差大小为:(16.3993-16.398)/16.3993*100%=0.08%;所以经过验证个,可以确定该辨识结果可以反应该系统的传递函数。
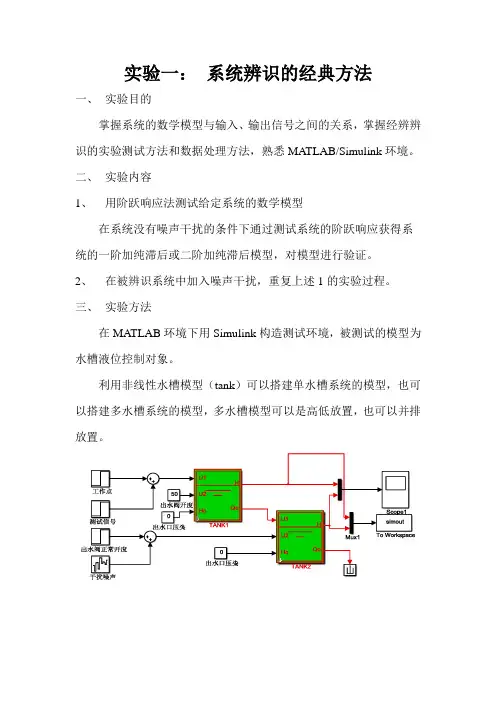
实验一:系统辨识的经典方法一、实验目的掌握系统的数学模型与输入、输出信号之间的关系,掌握经辨辨识的实验测试方法和数据处理方法,熟悉MATLAB/Simulink环境。
二、实验内容1、用阶跃响应法测试给定系统的数学模型在系统没有噪声干扰的条件下通过测试系统的阶跃响应获得系统的一阶加纯滞后或二阶加纯滞后模型,对模型进行验证。
2、在被辨识系统中加入噪声干扰,重复上述1的实验过程。
三、实验方法在MATLAB环境下用Simulink构造测试环境,被测试的模型为水槽液位控制对象。
利用非线性水槽模型(tank)可以搭建单水槽系统的模型,也可以搭建多水槽系统的模型,多水槽模型可以是高低放置,也可以并排放置。
1.噪声强度0.5,在t = 20的时候加入阶跃测试信号相应曲线2.乘同余法产生白噪声A=19;N=200;x0=37;f=2;M=512; %初始化;for k=1: N %乘同余法递推100次;x2=A*x0; %分别用x2和x0表示xi+1和xi-1;x1=mod(x2,M); %取x2存储器的数除以M的余数放x1(xi)中;v1=x1/M; %将x1存储器中的数除以256得到小于1的随v(:,k)=(v1-0.5 )*f;x0=x1; % xi-1= xi;v0=v1;end %递推100次结束;v2=v;k1=k;h=k1;%以下是绘图程序;k=1:1:k1;plot(k,v,'r');grid onset(gca,'GridLineStyle','*');grid(gca,'minor')3.白噪声序列图像020406080100120140160180200-1-0.8-0.6-0.4-0.20.20.40.60.81四、 思考题(1) 阶跃响应法测试系统数学模型的局限性。
答:只适用于某些特殊对象或者低阶简单系统;参数估计的精度有限,估计方法缺乏一般性。
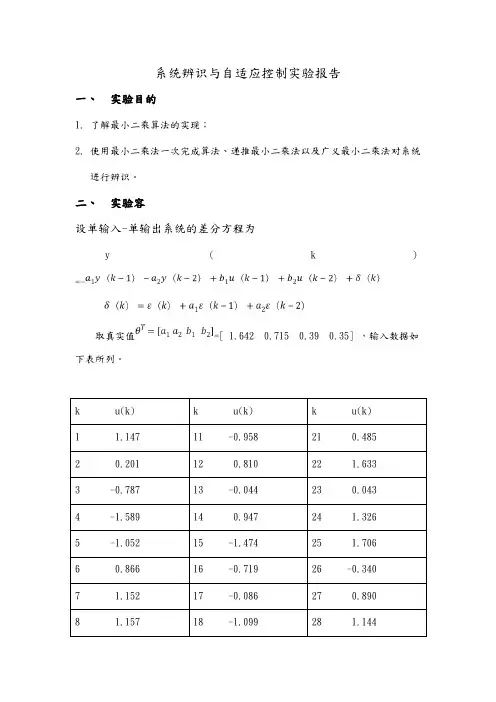
系统辨识与自适应控制实验报告一、实验目的1.了解最小二乘算法的实现;2.使用最小二乘法一次完成算法、递推最小二乘法以及广义最小二乘法对系统进行辨识。
二、实验容设单输入-单输出系统的差分方程为y(k)=-取真实值=[ 1.642 0.715 0.39 0.35] ,输入数据如下表所列。
k u(k) k u(k) k u(k)1 1.147 11 -0.958 21 0.4852 0.201 12 0.810 22 1.6333 -0.787 13 -0.044 23 0.0434 -1.589 14 0.947 24 1.3265 -1.052 15 -1.474 25 1.7066 0.866 16 -0.719 26 -0.3407 1.152 17 -0.086 27 0.8908 1.157 18 -1.099 28 1.1449 0.626 19 1.450 29 1.177 10 0.43320 1.15130 -0.390用的真实值利用查分方程求出作为测量值,为均值为0,方差为0.1,0.5的不相关随机序列。
(1) 用最小二乘法估计参数(2) 用递推最小二乘法估计参数θ。
(3) 用辅助变量法估计参数θ。
(4) 设,用广义最小二乘法估计参数θ。
(5) 用增广矩阵法估计参数θ详细分析和比较所获得的参数辨识结果,并说明上述参数辨识方法的优点。
三、 实验设备Matlab 软件,PC 机一台。
四、实验原理4.1 最小二乘一次完成算法 4.1.1 公式 辨识参数L T LL TL LS y XX X 1)(-Λ=θ上式中4.1.2 程序流程图图 1最小二乘一次完成程序流程图4.2 递推最小二乘算法4.2.1 递推公式公式为其中,4.2.2 算法流程图图 2 递推最小二乘法实现程序框图4.3 增广最小二乘递推算法4.3.1 递推公式公式为:其中,4.3.2 算法流程图图 3 增广最小二乘法算法流程图五、实验结果5.1 最小二乘法一次完成实验结果XL =0 0 0 00 0 0 00 0 0.2010 1.1470-0.4798 0 -0.7870 0.20101.0245 -0.4798 -1.5890 -0.7870-0.4439 1.0245 -1.0520 -1.5890 0.9629 -0.4439 0.8660 -1.0520 -1.2332 0.9629 1.1520 0.8660 0.5840 -1.2332 1.5730 1.1520 -1.0939 0.5840 0.6260 1.5730 0.5840 -1.0939 0.4330 0.6260 -0.5647 0.5840 -0.9580 0.4330 0.7317 -0.5647 0.8100 -0.9580 -0.7784 0.7317 -0.0440 0.8100 0.4885 -0.7784 0.9470 -0.0440 -0.5996 0.4885 -1.4740 0.9470 0.8786 -0.5996 -0.7190 -1.4740 -0.2177 0.8786 -0.0860 -0.7190 0.0144 -0.2177 -1.0990 -0.0860 0.5907 0.0144 1.4500 -1.0990 -1.1611 0.5907 1.1510 1.4500 0.5277 -1.1611 0.4850 1.1510 -0.6284 0.5277 1.6330 0.4850 -0.1521 -0.6284 0.0430 1.6330 0.1108 -0.1521 1.3260 0.0430 -0.6053 0.1108 1.7060 1.3260 -0.2147 -0.6053 -0.3400 1.70600.3208 -0.2147 0.8900 -0.3400 -0.6014 0.3208 1.1440 0.8900 0.0005 -0.6014 1.1770 1.1440 yL =0.4798-1.02450.4439-0.96291.2332-0.58401.0939-0.58400.5647-0.73170.7784-0.48850.5996-0.87860.2177-0.0144-0.59071.1611-0.52770.62840.1521-0.11080.60530.2147-0.32080.6014-0.00050.4302辨识参数矩阵c =1.64200.71500.39000.3500a1 =1.6420;a2 =0.7150;b1 =0.3900;b2 =0.3500 下图为输入、输出矩阵的根径图图 4最小二乘法一次实现输入输出根径图5.2 递推最小二乘法算法辨识结果系统输出矩阵:y =Columns 1 through 130 0 0.4798 -1.0245 0.4439 -0.9629 1.2332 -0.5840 1.0939 -0.5840 0.5647 -0.7317 0.7784Columns 14 through 26-0.4885 0.5996 -0.8786 0.2177 -0.0144 -0.5907 1.1611 -0.5277 0.6284 0.1521 -0.1108 0.6053 0.2147Columns 27 through 30-0.3208 0.6014 -0.0005 0.4302辨识参数矩阵(辨识过程执行26次即满足了误差要求):c =Columns 1 through 130.0010 0 0.0010 0.5690 1.3863 1.64201.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.0010 0 0.0010 0.0010 -0.2821 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.71500.0010 0 0.0719 1.0162 0.5392 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.39000.0010 0 0.4057 0.2403 0.3239 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500Columns 14 through 261.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.71500.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.39000.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.3500辨识误差矩阵:e =Columns 1 through 130 0 0 567.9876 1.4365 0.1844 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.00000 0 0 0 -283.1457 -3.5341 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.00000 0 70.9263 13.1283 -0.4694 -0.2767 0.0000 0.0000 -0.0000 -0.0000 0.0000 -0.0000 -0.00000 0 404.7388 -0.4078 0.3479 0.0807 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000Columns 14 through 260.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 0.0000 0.0000 0.00000.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.00000.0000 -0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 -0.00000.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000输入输出根径图图 5 递推最小二乘法输入输出根径图辨识参数过程图 6 递推最小二乘法辨识参数(辨识过程)辨识误差:图 7 递推最小二乘法辨识过程中的误差曲线5.3 增光最小二乘法实验结果随机噪声e0 =Columns 1 through 130.8017 0.3112 0.0400 1.5927 2.1796 -0.2063 0.4197 -0.4914 0.9967 -2.0484 1.3063 0.5351 0.5779Columns 14 through 261.5297 0.0416 0.1831 -0.9543 -1.3474 -0.3873 0.5971 -0.2250 -1.0173 1.3889 -0.3959 0.3049 0.3154Columns 27 through 300.0668 0.7128 0.0522 -1.3478考虑噪声的系统输出矩阵y =Columns 1 through 130 0 1.3292 -2.8976 3.0444 -3.4535 4.0637 -1.2169 1.8419 -1.5061 0.3942 -3.0734 2.3278Columns 14 through 26-0.7705 1.1973 -0.1962 0.3711 -0.4941 -1.4314 1.2987 -1.5689 0.0303 1.8310 0.3403 -0.3472 0.5176Columns 27 through 30-1.1419 -0.4368 0.0696 1.6791不考虑噪声的系统输出矩阵ys =Columns 1 through 130 0 0.4798 -2.4191 2.9124 -3.8936 3.4635 -3.4509 0.1092 -1.3596 1.5440 0.2076 4.7453Columns 14 through 26-1.3584 -0.0452 -1.6585 -1.3303 -0.7543 0.0873 2.8846 -0.1526 2.2396 1.8786 -2.4398 -1.3358 1.4562Columns 27 through 30-0.1371 1.7331 2.2914 1.0575不考虑噪声时的模型输出ym =Columns 1 through 130 0 0.8502 -2.7124 3.2115 -4.4770 4.5771 -3.4086 0.1092 -1.3596 1.5440 0.2076 4.7453Columns 14 through 26-1.3584 -0.0452 -1.6585 -1.3303 -0.7543 0.0873 2.8846 -0.1526 2.2396 1.8786 -2.4398 -1.3358 1.4562Columns 27 through 30-0.1371 1.7331 2.2914 1.0575考虑噪声时的模型输出ymd =Columns 1 through 130 0 1.3292 -2.8976 3.0444 -3.4535 4.0637 -1.2169 1.8419 -1.5061 0.3942 -3.0734 2.3278Columns 14 through 26-0.7705 1.1973 -0.1962 0.3711 -0.4941 -1.4314 1.2987 -1.5689 0.0303 1.8310 0.3403 -0.3472 0.5176Columns 27 through 30-1.1419 -0.4368 0.0696 1.6791辨识参数矩阵:c =Columns 1 through 130.0010 0 0.0010 1.5171 1.6829 1.84351.8250 1.6529 1.6420 1.6420 1.6420 1.6420 1.64200.0010 0 0.0010 0.0010 -0.1409 0.7419 0.6281 0.7388 0.7150 0.7150 0.7150 0.7150 0.71500.0010 0 0.1268 1.0576 0.8180 0.3002 0.4168 0.3921 0.3900 0.3900 0.3900 0.3900 0.39000.0010 0 0.7190 0.6789 0.7019 0.4396 0.1656 0.3522 0.3500 0.3500 0.3500 0.3500 0.35000.0010 0 -0.1988 0.0261 0.0572 -0.0988 -0.0852 1.0030 1.0000 1.0000 1.0000 1.0000 1.00000.0010 0 0.2540 0.6848 0.6545 1.34961.4284 1.6100 1.6420 1.6420 1.6420 1.6420 1.64200.0010 0 0.4430 0.0984 0.1605 0.2657 0.6386 0.7305 0.7150 0.7150 0.7150 0.7150 0.7150Columns 14 through 261.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.71500.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.3900 0.39000.3500 0.3500 0.3500 0.3500 0.3500 0.35000.3500 0.3500 0.3500 0.3500 0.3500 0.3500 0.35001.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.00001.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150 0.7150Columns 27 through 301.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.71500.3900 0.3900 0.3900 0.39000.3500 0.3500 0.3500 0.35001.0000 1.0000 1.0000 1.00001.6420 1.6420 1.6420 1.64200.7150 0.7150 0.7150 0.7150辨识参数误差矩阵e =1.0e+003 *Columns 1 through 130 0 0 1.5161 0.0001 0.0001 -0.0000 -0.0001 -0.0000 -0.0000 -0.0000 -0.0000 -0.00000 0 0 0 -0.1419 -0.0063 -0.0002 0.0002 -0.0000 0.0000 0.0000 -0.0000 -0.00000 0 0.1258 0.0073 -0.0002 -0.0006 0.0004 -0.0001 -0.0000 -0.0000 -0.0000 -0.0000 -0.00000 0 0.7180 -0.0001 0.0000 -0.0004 -0.0006 0.0011 -0.0000 0.0000 -0.0000 -0.0000 0.00000 0 -0.1998 -0.0011 0.0012 -0.0027 -0.0001 -0.0128 -0.0000 0.0000 0.0000 0.0000 -0.00000 0 0.2530 0.0017 -0.0000 0.0011 0.0001 0.0001 0.0000 -0.0000 0.0000 0.0000 0.00000 0 0.4420 -0.0008 0.0006 0.0007 0.0014 0.0001 -0.0000 0.0000 0.0000 -0.0000 0.0000Columns 14 through 260.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.00000.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000-0.0000 -0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 -0.00000.0000 0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 0.0000 -0.0000 -0.0000 -0.0000-0.0000 -0.0000 -0.0000 0.0000 -0.0000 0.0000 -0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 -0.00000.0000 0.0000 0.0000 0.0000 0.0000 0.00000.0000 0.0000 0.0000 -0.0000 -0.0000 0.0000 0.0000-0.0000 -0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 0.0000 -0.0000Columns 27 through 300.0000 -0.0000 -0.0000 0.00000.0000 -0.0000 -0.0000 0.00000.0000 -0.0000 -0.0000 -0.0000-0.0000 0.0000 -0.0000 -0.00000.0000 0.0000 0.0000 -0.00000.0000 0.0000 0.0000 0.00000.0000 -0.0000 0.0000 0.0000输入输出根径图:图 8 增广最小二乘法输入输出根径图辨识过程的参数:图 9 增广最小二乘法辨识过程参数辨识过程中的误差图 10 增广最小二乘法辨识过程中的误差系统输出矩阵和模型输出矩阵的对比:图 11 系统输出矩阵和模型输出矩阵的对比图六、结果分析利用最小二乘法对系统进行辨识,能够在最小误差平方的意义上对实验数据实现最好的拟合。
第四章 系统辨识中的实际问题§4 —1 辨识的实验设计一、系统辨识的实验信号实验数据是辨识的基础,只有高质量的数据才能得出良好的数学模型,而且实验数据如果不能满足起码的要求,辨识根本得不出解。
系统辨识学科是在数理统计的时间序列分析的基础上发展起来的,两者的区别在于系统辨识的对象存在着人为的激励(控制)作用,而时序分析则没有。
因此,前者能通过施加激励信号u(k)达到获得较好辩识结果的目的(即实验信号的设计),而后者不能。
(一)系统辨识对实验信号的最起码的要求 为了辨识动态系统,激励信号u 必须在观测的周期内对系统的动态持续地激励。
满足辨识对激励信号最起码的要求的持续激励信号应具备的条件称“持续激励条件”,分以下四种情况讨论: 1. 连续的非参数模型辨识(辩识频率特性)如果系统通频带的上下限为 ωmin ≤ ω ≤ ωmax ,要求输入信号的功率密度谱在此范围内不等于零。
)()()}({)}({)(ωωωj U j Y t u F t y F j G ==2. 连续的参数模型辨识 被辩识的连续传函为,共包含(m+n+1)个参数对于u(t)的每一个频率成分ωi 的谐波,对应的频率响应有一个实部R(ωi )和一个虚部Im(ωi ),由此对应两个关系式(方程),能解出两个未知参数。
因此,为辩识(m+n+1)个参数,持续激励信号至少应包含:j ≥( m+n+1 )/2 个不同的频率成分。
3. 离散的脉冲响应 g(τ)的辨识g(τ) ;τ = 0,1,..m ,假设过程稳定,当 τ > m 时 g(τ)= 0 。
由维纳—何甫方程有:R uy (τ )=∑ g(σ)R uu (τ - σ) 式(4-1-1)由上式得出(m+1)个方程的方程组:上式表达成矩阵形式φuy = φuu G 式(4-1-2) 可解出 G = φuu -1 φuy 式(4-1-3)G s b b s b s a s a s m mn n ()=++++++0111R R R m R R R m R R R m R m R m R g g g m uy uy uy uu uu uu uu uu uu uuuu uu ()()()()()()()()()()()()()()()010******** ⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥=----⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⋅⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥G = [ g(0),…,g(m) ]T 有解的条件是:如果所有的输出自相关函数式(4-1-4)都存在,且方阵φuu 非奇异, 即det φuu ≠ 0 。
实验报告课程名称:系统辨识院系:信息学院自动化系班级:自实1001学生姓名:马耀元学生学号: 2010014033指导教师:李宏光日期: 2012/12/16目录前言 (3)程序概况 (4)实验一:矩阵运算 (6)实验要求 (6)程序概括 (6)程序运行结果 (7)程序代码 (8)附加程序 (12)实验二:m序列和输出序列程序 (18)实验要求 (18)程序概况 (18)程序运行效果 (18)程序代码 (20)附加程序 (23)实验三、四:最小二乘成批、递推程序 (28)实验要求 (28)程序概况 (28)程序运行效果 (28)程序代码 (30)附加程序 (32)附图: (37)前言本学期系统辨识课程的实验共有四个。
分别有矩阵相乘、矩阵求逆、伪随机m序列产生、系统模型输出序列产生,以及最小二乘成批算法和最小二乘递推算法分别来求系统模型参数的程序。
报告中另外加写了白噪声序列产生程序的三种方法、任意m序列产生,以及矩阵转置、矩阵加减、随机矩阵生成、任意文件读取任意矩阵、任意输入数据类型然后自动查找有用数据并生成矩阵,以及循环变动屏幕颜色、播放自定义音律等其他程序函数,总共有32个函数,其中7个函数已能实现四个实验所需的所有功能,其他均是为完善程序和使程序在任意情况下灵活使用,以及确保程序反复运行、任意操作、均保持健壮性、力求程序保持完美、界面友好,而不仅局限于课程要求。
本程序是用visual studio 2010所写,在名为“系统辨识”的工程文件里面完成。
其中有一个名为“myy”类文件,其头文件里包含所有的成员函数,以及所需要作为通讯接口的公有变量。
而在“系统辨识”的cpp文件中,作为程序入口的main函数里,调用“myy.h”的诸多函数,而每个函数几乎都有公用的接口变量,进行不同函数间的通信,进而实现各式各样的功能。
本程序一共提供16个基本功能,当然可以自定义其他函数调用方案,进而实现其他功能。
《系统辨识》实验手册第二炮兵工程大学控制工程系2015年5月目录实验1 白噪声和M序列的产生---------------------------------------------------------- 2 实验2 相关分析法辨识脉冲响应------------------------------------------------------- 5 实验3 最小二乘法的实现--------------------------------------------------------------- 9 实验4 递推最小二乘法的实现---------------------------------------------------------- 12 附录实验报告模板---------------------------------------------------------------------- 16实验1 白噪声和M 序列的产生一、实验目的1、熟悉并掌握产生均匀分布随机序列方法以及进而产生高斯白噪声方法2、熟悉并掌握M 序列生成原理及仿真生成方法二、实验原理1、混合同余法混合同余法是加同余法和乘同余法的混合形式,其迭代式如下:111(*)mod /n n n n x a x b MR x M +++=+⎧⎨=⎩ 式中a 为乘子,0x 为种子,b 为常数,M 为模。
混合同余法是一种递归算法,即先提供一个种子0x ,逐次递归即得到一个不超过模M 的整数数列。
2、正态分布随机数产生方法由独立同分布中心极限定理有:设随机变量12,,....,,...n X X X 相互独立,服从同一分布,且具有数学期望和方差:2(),()0,(1,2,...)k k E X D X k μσ==>=则随机变量之和1nk i X =∑的标准化变量:()nnnkk kXE X Xn Y μ--==∑∑∑近似服从(0,1)N 分布。
系统辨识及自适应控制实验报告实验报告:系统辨识及自适应控制1.引言系统辨识和自适应控制是现代自动控制领域中的重要研究内容。
系统辨识是通过采集系统输入输出数据,建立数学模型描述系统的动态行为。
自适应控制则是根据系统辨识得到的模型,调整控制器参数以适应系统的变化和外部干扰。
本实验旨在通过实际操作,掌握系统辨识和自适应控制的基本原理和方法。
2.实验目的1)了解系统辨识的基本原理和方法;2)掌握常见的系统辨识方法,包括参数辨识和频域辨识;3)理解自适应控制的基本原理和方法;4)熟悉自适应控制的实现过程;5)通过实验验证系统辨识和自适应控制的有效性。
3.实验原理3.1系统辨识原理系统辨识的目标是通过采集系统输入输出数据,建立数学模型来描述系统的动态特性。
常见的系统辨识方法包括参数辨识和频域辨识两种。
参数辨识是通过拟合实际测量数据,找到最佳的模型参数。
常用的参数辨识方法有最小二乘法、极大似然法和最小误差平方等。
频域辨识则是通过对输入输出信号的频谱分析,得到系统的频率响应特性。
常用的频域辨识方法有傅里叶变换法、相关分析法和谱估计法等。
3.2自适应控制原理自适应控制是根据系统辨识得到的模型,调整控制器参数以适应系统的变化和外部干扰。
自适应控制分为基于模型的自适应控制和模型无关的自适应控制。
基于模型的自适应控制利用系统辨识得到的模型参数,设计相应的控制器来实现自适应控制。
常见的基于模型的自适应控制方法有模型参考自适应控制和模型预测自适应控制等。
模型无关的自适应控制则不依赖于系统辨识的模型,而是根据实际测量数据直接调整控制器参数。
常见的模型无关的自适应控制方法有自适应滑模控制和神经网络控制等。
4.实验内容4.1系统辨识实验在实验中,我们通过采集系统输入输出数据,根据最小二乘法进行参数辨识。
首先设置系统的输入信号,如阶跃信号或正弦信号,并记录对应的输出数据。
然后根据采集到的数据,选取适当的模型结构,通过最小二乘法求解最佳的模型参数。
系统辨识实验内容与要求实验题目:三温区空间晶体生长炉温度系统建模实验对象:三温区空间晶体生长炉单晶体是现代电子设备制造技术的一个必不可少的部分,它应用广泛,如二极管、三极管等半导体器件都需要用到单晶体。
组分均匀(compositional uniformity)、结晶完整(crystallographic perfection)的高质量晶体材料是保证电子设备性能重要因素。
目前,单晶体制备主要靠晶体生长技术完成。
其主要过程是:首先在坩埚等加热器皿中对籽晶进行加热,使其由固相转变为液相或气相,再降低器皿中温度,使液相或气相的籽晶材料冷却结晶,就可得到最终的单晶体。
这个过程中,为保证晶体的组分均匀和结晶完整,必须使晶体内部各晶格的受力均匀。
因此,为减小重力对晶体生长的影响,研究者提出在空间微重力环境下进行晶体生长的方案。
我们研究的空间晶体生长炉就是该方案中的晶体加热设备。
我们研究的空间晶体生长炉采用熔体Bridgman生长方式,其结构如图1所示。
炉身由三部分构成:外筒、炉管以及炉管外部的隔热层。
炉管由多个加热单元组成,每个加热单元组成一个温区。
加热单元由导热性能良好的陶瓷材料制成,两个加热单元之间有隔热单元隔开。
加热单元的外测均匀缠绕加热电阻丝,内侧中间部位安装有测温热电偶。
炉管外部的隔热层由防辐射绝热材料制成。
微重力环境下,晶体内部各晶格之间的热应力是影响晶体生长质量的关键因素,而热应力是由炉内温场决定的。
因此,必须对晶体炉内各温区的温度进行控制,以构造一个具有一定的梯度的、满足晶体生长需要的温场。
工作时,将装有籽晶的安瓿管按一定的速度插入晶体炉炉膛内,通过控制流过各温区加热电阻丝的电流控制炉内温场,通过热电偶在线获取各温区的实时温度值,进行闭环控制,。
其中,流过电阻丝的电流通过PWM(脉宽调制)方式进行控制。
另外,由于晶体炉工作温度的变化范围比较大,传感器热电偶难以在全量程范围内保持很高的线性度,因此,使用的热电偶的电压读数与实际温度值间需要进行查表变换。
2、用普通最小二乘法(OLS)法辨识对象数学模型选择得仿真对象得数学模型如下)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+--其中,)(k v 就是服从正态分布得白噪声N )1,0(。
输入信号采用4阶M 序列,幅度为1。
选择如下形式得辨识模型)()2()1()2()1()(2121k v k u b k u b k z a k z a k z +-+-=-+-+设输入信号得取值就是从k =1到k =16得M 序列,则待辨识参数LSθˆ为LS θˆ=L τL 1L τL z H )H H -(。
其中,被辨识参数LSθˆ、观测矩阵z L 、H L 得表达式为 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2121ˆb b a a LS θ , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)16()4()3(z z z L z , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=)14()2()1()15()3()2()14()2()1()15()3()2(u u u u u u z z z z z z L H 程序框图如下所示:参考程序:%olsM 序列z=zeros(1,16); %for k=3:16 z(k)=1、endsubplot(3,1,1) %stem(u) %subplot(3,1,2) %画三行一列图形窗口中得第二个图形i=1:1:16; %横坐标范围就是1到16,步长为1plot(i,z) %图形得横坐标就是采样时刻i, 纵坐标就是输出观测值z, 图形格式为连续曲线subplot(3,1,3) %画三行一列图形窗口中得第三个图形stem(z),grid on%画出输出观测值z得经线图形,并显示坐标网格u,z%显示输入信号与输出观测信号%L=14%数据长度HL=[-z(2) -z(1) u(2) u(1);-z(3) -z(2) u(3) u(2);-z(4) -z(3) u(4) u(3);-z(5) -z(4) u(5) u(4);-z(6) -z(5) u(6) u(5);-z(7) -z(6) u(7) u(6);-z(8) -z(7) u(8) u(7);-z(9) -z(8) u(9) u(8);-z(10) -z(9) u(10) u(9);-z(11) -z(10) u(11) u(10);-z(12) -z(11) u(12) u(11);-z(13) -z(12) u(13) u(12);-z(14) -z(13) u(14) u(13);-z(15) -z(14) u(15) u(14)] %给样本矩阵HL赋值ZL=[z(3);z(4);z(5);z(6);z(7);z(8);z(9);z(10);z(11);z(12);z(13);z(14);z(15);z(16)]% 给样本矩阵zL赋值%calculating parameters%计算参数c1=HL'*HL; c2=inv(c1); c3=HL'*ZL; c=c2*c3 %计算并显示%DISPLAY PARAMETERSa1=c(1), a2=c(2), b1=c(3), b2=c(4) %从中分离出并显示a1 、a2、 b1、 b2%End注:由于输出观测值没有任何噪音成分,所以辨识结果也无任何误差,同学们可以在输出观测值中添加噪音,观察ols得辨识效果。
同时,可以尝试增加输入信号得数量,瞧辨识结果有何变化。
实验二 基于RLS 法得系统辨识数字仿真实验一、实验目得1、深入理解系统辨识中相关分析法及最小二乘法得相关内容。
2、学会用Matlab 或C 语言等进行系统辨识得仿真研究二、实验设备装有相应软件得计算机。
三、实验原理1、 考虑如下图所示得仿真对象:图中,(v )(1-z G = ⎪⎪⎩⎪⎪⎨⎧=+==---1)(5.00.1)()(111z D z z z B z A 选择上图所示得辨识模型。
仿真对象选择如下得模型结构:)()2()1()2()1()(2121k v k u b k u b k z a k z a k z +-+-=-+-+ (2) 其中,)(k v 就是服从正态分布得白噪声N )1,0(。
输入信号采用4位移位寄存器产生得M 序列,幅度为0、03。
按式(3))()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+-- (3)构造h (k );加权阵取单位阵I Λ=L ;利用如下公式计算K (k )、)(ˆk θ与P (k ),计算各次参数辨识得相对误差,精度满足要求后停机。
递推最小二乘法得推导公式如下:(1)()()(1)(1)1(1)()(1)(1)()(1)(1)()(1)()(1)[][1](1)T k k k k k T k k k k k k Tk k k k k k y xK P x x P x P P k k x P θθθ∧∧∧+++-++++++=++-=+=-+ (4) 2、阶得辨识 前面所讨论得系统辨识方法,都就是假定模型得阶次就是已知得,因此仅仅要求估计差分方程得系数。
但实际上,系统得阶次就是很难被准确知道得。
因为对阶次得理解程度就是直接与一个线性差分方程得准确结构有关得,所以有关阶次得确定也可以称为系统结构得确定。
经验指出,一个模型得阶次不准,就可能在控制系统设计时发生严重问题。
故在辨识过程中,模型得阶次就是否合适就是必须加以检验得。
一般阶得方法中,常用得有这么几种:零极点相消法、目标函数法与F 检验法。
下面只介绍其中得目标函数法。
当我们用不同阶得模型给系统得输入——输出观测数据进行最小二乘拟合时,会得到不同得估计误差:因此利用J 极小化确定阶就是很自然得。
实验表明,假设模型具有大于1而小于max N 得阶n,当n 取1,2,…时, 若随着n 得增加, 在ˆn(阶得估计量)-1时,J 最后一次出现陡峭得下降,往后J 就近似地保持不变或者只有微小得下降(见下图),则取ˆn n=。
也就就是说,模型阶次得确定可以直接依次计算阶次n =1,2,…时得最小二乘估计ˆn以及相应得损失函数J ,然后选择当J 下降不明显时得阶次作为合适得模型阶次n,这种方法也叫确定阶得估计准则方法,有很广得应用。
Jn 四、实验内容1、 用递推最小二乘法2、 对象阶得辨识。
五、实验要求∑===Nk T EE k e J 12)(1、熟悉系统辨识中得相关内容。
2、掌握Matlab或C语言等进行系统辨识仿真研究得一般步骤。
3、实验前基本应完成相关得编程任务,实验时调试相应程序。
4、修改相应参数与随机噪声幅度,观察并分析结果。
5、软件包人机界面得开发与设计。
(选做)六、实验步骤1、首先要熟悉一下MATLAB得运行环境:1)File->New->M-File打开M文件编辑窗口2)输入自己编写得程序3)点击run按钮,如果程序出错则调试程序,如果运行正常得话则观察程序得运行结果2、用递推最小二乘法(RLS)法辨识对象数学模型在这个实验中,我们采用以下模型进行仿真:y=1.5*y[k-1]-0.7*y[k-2]+0*u[k]+1.0*u[k-1]+0.5*u[k-2]+e[k] (5),它x3=y2;%第三个移位积存器得输入就是第2个移位积存器得输出x4=y3;%第四个移位积存器得输入就是第3个移位积存器得输出y(i)=y4;%取出第四个移位积存器幅值为"0"与"1"得输出信号,if y(i)>0、5,u(i)=-0、03;%如果M序列得值为"1"时,辨识得输入信号取“-0.03”else u(i)=0、03;%当M序列得值为"0"时,辨识得输入信号取“0.03”end%小循环结束y1=x1;y2=x2;y3=x3;y4=x4;%为下一次得输入信号做准备end%大循环结束,产生输入信号ufigure(1);%第1个图形stem(u),grid on%以径得形式显示出输入信号并给图形加上网格z(2)=0;z(1)=0;%取z得前两个初始值为零for k=3:15;%循环变量从3到15z(k)=1、5*z(k-1)-0、7*z(k-2)+u(k-1)+0、5*u(k-2);%给出理想得辨识输出采样信号end%RLS递推最小二乘辨识c0=[0、001 0、001 0、001 0、001]';%直接给出被辨识参数得初始值,即一个充分小得实向量p0=10^6*eye(4,4);%直接给出初始状态P0,即一个充分大得实数单位矩阵E=0、000000005;%相对误差E=0、000000005c=[c0,zeros(4,14)];%被辨识参数矩阵得初始值及大小e=zeros(4,15);%相对误差得初始值及大小for k=3:15; %开始求Kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2)]'; x=h1'*p0*h1+1; x1=inv(x); %开始求K(k)k1=p0*h1*x1;%求出K得值d1=z(k)-h1'*c0; c1=c0+k1*d1;%求被辨识参数ce1=c1-c0;%求参数当前值与上一次得值得差值e2=e1、/c0;%求参数得相对变化e(:,k)=e2; %把当前相对变化得列向量加入误差矩阵得最后一列c0=c1;%新获得得参数作为下一次递推得旧参数c(:,k)=c1;%把辨识参数c 列向量加入辨识参数矩阵得最后一列p1=p0-k1*k1'*[h1'*p0*h1+1];%求出 p(k)得值p0=p1;%给下次用if e2<=E break;%若参数收敛满足要求,终止计算end%小循环结束end%大循环结束c%显示被辨识参数e%显示辨识结果得收敛情况%分离参数a1=c(1,:); a2=c(2,:); b1=c(3,:); b2=c(4,:); ea1=e(1,:); ea2=e(2,:); eb1=e(3,:); eb2=e(4,:);figure(2);%第2个图形i=1:15;%横坐标从1到15plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':') %画出a1,a2,b1,b2得各次辨识结果title('Parameter Identification with Recursive Least Squares Method')%图形标题figure(3); %第3个图形i=1:15; %横坐标从1到15plot(i,ea1,'r',i,ea2,'g',i,eb1,'b',i,eb2,'r:') %画出a1,a2,b1,b2得各次辨识结果得收敛情况title('Identification Precision') %图形标题注:同样这个程序使用得输出信号也没有噪音,所以辨识得结果没有误差,请同学们在输出信号中加入噪音,再使用RLS对其辨识,观察辨识结果,进行分析。