打印机皮带驱动器的设计与仿真
- 格式:ppt
- 大小:710.00 KB
- 文档页数:18

宁波理工学院现代控制理论课程设计报告题目打印机皮带驱动系统能控能观和稳定性分析项目成员史旭东童振梁沈晓楠专业班级自动化112指导教师何小其分院信息分院完成日期 2014-5-28目录1. 课程设计目的 (4)2.课程设计题目描述和要求 (4)3.课程设计报告内容 (4)3.1 原理图 (4)3.2 系统参数取值情况 (5)3.3 打印机皮带驱动系统的状态空间方程 (5)4. 系统分析 (8)4.1 能控性分析 (8)4.2 能观性分析 (8)4.3 稳定性分析 (9)5. 总结 (11)项目组成员具体分工打印机皮带驱动系统能控能观和稳定性分析课程设计的内容如下:1.课程设计目的综合运用自控现代理论分析皮带驱动系统的能控性、能观性以及稳定性,融会贯通并扩展有关方面的知识。
加强大家对专业理论知识的理解和实际运用。
培养学生熟练运用有关的仿真软件及分析,解决实际问题的能力,学会应用标准、手册、查阅有关技术资料。
加强了大家的自学能力,为大家以后做毕业设计做很好的铺垫。
2.课程设计题目描述和要求(1)环节项目名称:能控能观判据及稳定性判据(2)环节目的:①利用MATLAB分析线性定常系统的可控性和客观性。
②利用MATLAB进行线性定常系统的李雅普诺夫稳定性判据。
(3)环节形式:课后上机仿真(4)环节考核方式:根据提交的仿真结果及分析报告确定成绩。
(5)环节内容、方法:①给定系统状态空间方程,对系统进行可控性、可观性分析。
②已知系统状态空间方程,判断其稳定性,并绘制出时间响应曲线验证上述判断。
3.课程设计报告内容3.1 原理图在计算机外围设备中,常用的低价位喷墨式或针式打印机都配有皮带驱动器。
它用于驱动打印头沿打印页面横向移动。
图1给出了一个装有直流电机的皮带驱动式打印机的例子。
其光传感器用来测定打印头的位置,皮带张力的变化用于调节皮带的实际弹性状态。
图1 打印机皮带驱动系统3.2 系统参数取值情况表1打印装置的参数3.3 打印机皮带驱动系统的状态空间方程图2 打印机皮带驱动模型状态空间建模及系统参数选择。
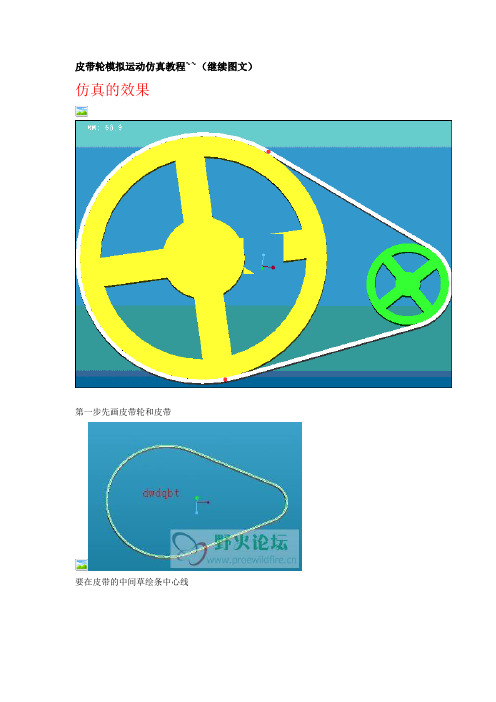
皮带轮模拟运动仿真教程~~(继续图文)仿真的效果
第一步先画皮带轮和皮带
要在皮带的中间草绘条中心线
第二步画个小圆柱,它的长度比皮带的宽度长一点,直径与皮带厚度相同,用轴线和一个断面为参照做一个基准点
第三步开始装配,先皮带,用缺省或固定都可以
第四步做两个基准轴,等下放皮带轮用
第五步放皮带轮,用销钉连接,这两个简单就不仔细说明了
然后插入小圆柱,用槽连接
两个对象分别为圆柱上的参照点和带轮上草绘的曲线
选曲线的时候记得按ctrl把整条曲线都选上
第六步新设置一个平面连接,防止小圆柱乱动
两个面可以是圆柱上的端面和皮带轮上的侧面
出现连接失败的时候把偏移里的重合改成偏距
这个小圆柱就定义好了,刚才说让圆柱的长度大于皮带的宽度就是为了看清楚点,防止被埋在里面
然后运动仿真
第七步选应用程序里的机构
然后选插入里的初始条件
第八步定义一个切向槽速度
选圆柱的那个槽连接,给它一个模,就是速度,这个是线速度
第九步定义一个运动轴速度
选皮带轮的销钉连接
两个皮带轮都要定义
这些速度都要算一下,与上面的切向槽速度要匹配第十步就可以分析了
选动态和初始条件
运行就可以了。
《FDM彩色3D打印机系统设计与仿真》篇一一、引言随着科技的不断发展,3D打印技术已经成为一种创新性的制造技术,广泛应用于各个领域。
FDM(熔融沉积造型)作为3D 打印的一种主流技术,因其操作简便、成本低廉等特点被广大用户所喜爱。
近年来,随着市场需求不断增长,对3D打印机的功能和性能要求也在逐步提高。
因此,本文设计了一款具有彩色的FDM 3D打印机,并进行详细的系统设计与仿真。
二、系统设计(一)硬件设计1. 打印平台:采用高精度的加热平台,确保打印过程中模型的稳定性。
2. 喷头:选用高质量的喷头材料,具备高精度、耐高温等特性。
喷头采用多色切换设计,以实现彩色打印。
3. 控制系统:采用高性能的主控芯片,具备高速度、高精度的控制能力。
同时,配备友好的人机交互界面,方便用户操作。
4. 驱动系统:采用高精度的步进电机和驱动器,确保打印过程中的精确度和稳定性。
(二)软件设计1. 切片软件:将三维模型转化为打印机的运动指令。
该软件需具备高效的算法,以确保打印过程中模型精度和效率。
2. 控制软件:负责控制整个打印过程,包括温度控制、运动控制等。
同时,还需具备故障诊断和报警功能,确保打印过程的安全性。
三、系统仿真为验证设计的可行性及性能表现,本文对FDM彩色3D打印机进行了系统仿真。
仿真过程包括机械结构仿真、热力学仿真和运动控制仿真等。
(一)机械结构仿真通过有限元分析软件对打印机的机械结构进行仿真分析,验证了结构的稳定性和可靠性。
同时,对关键部件如喷头、驱动系统等进行仿真分析,确保其满足高精度、高效率的打印需求。
(二)热力学仿真为确保打印过程中模型的加热和冷却过程顺利进行,本文对打印机的热力学性能进行了仿真分析。
通过模拟不同材料的加热和冷却过程,验证了加热平台的温度控制精度和均匀性。
(三)运动控制仿真为验证控制系统的精确度和稳定性,本文对运动控制系统进行了仿真分析。
通过模拟打印过程中的运动轨迹和速度变化,验证了驱动系统和控制算法的准确性和可靠性。

Delta型3D打印机结构设计的运动学仿真(ADAMS)教程1、模型导入用SOLIDWORKS建好三维模型(零件和装配体全部用英文命名并保存在同一位置)后直接保存(不需要转换其他格式)。
导入过程如下:文件—导入在文件类型的下拉菜单中选择SOLIDWORKS,在读取文件处右键选择浏览,找到要导入的三维模型如下图所示。
注意:1、在SOLIDWORKS中将模型的原点与全局坐标系的原点重合。
2、“强化壳体”不选,否则导入后是整体,无法仿真。
导入后的模型如下图所示。
在ADAMS的右下角点击得到如下用于可用于仿真的模型。
2、布尔运算在“物体”菜单栏中选择(布尔加运算)分别对底座、顶座和立柱,滑块和套筒,喷头支架和喷嘴间进行布尔加运算,结果如下图所示。
3 、添加质量选择要添加质量的零件右键,在快捷菜单中选择“修改”弹出如下对话框,在定义质量方式下拉菜单中选择定义质量的方式。
4 添加同步带运动系统在如上所示的菜单中选择带。
具体过程如下:首先点击第一个图标,在此处设置带轮的形式。
Next设置显示方式:Next设置带轮的外形齿轮和放置位置,注意1,2分别设置带轮1和带轮2。
Next材料,Next连接方式,Next Output,一直设置到Finish。
下面是皮带的生成,需要点击第二个图标,如下图所示。
在上图框中双击,选中前面生成的带轮系统,如下图所示:一直Next。
在此处双击白框,按住Ctrl选中前面生成的两个带轮,如下图所示:Next自动生成带。
点击第三个图标,添加驱动。
同样双击空白的框框,选中需要添加驱动的带系统和带轮,如下图所示:在Nest设置驱动方式和驱动函数以及输出,结果如下图所示。
注意:1、带轮的旋转轴分别为(-1,90,0)、(240,90,90)、(-60,90,0)。
中心定位坐标为(0,217.58,-42.5)、(0,217.58,-829)、(188.43,-108.79,-42.5)、(188.43,-108.79,-829)、(-188.43,-108.79,-42.5)、(-188.43,-108.79,-829)。

3D打印机DRV8825步进电机驱动器,这个驱动如何?创意
DIY
相对4988 特点优势:
1、最大电流2.5A。
2、最高支持32细分。
3、4层PCB板,散热性能更好。
4、芯片内阻更小,发热更低,散热性更好。
模块参数:
尺寸:1.5mmX2mm(和4988相同)
可驱动电流:2.5A
细分:1,1/2,1/4,1/8,1/16,1/32
制造工艺:SMT贴片机制造,非手工焊接,良品率更高,性能更稳定
适合对象:
需要驱动步进电机的场合。
是构建3d打印机,cnc,雕刻机等必备模块。
支持的3d打印机有Prusa Mendel,ultimaker,printbot,makerbot 等。
DRV8825特色有以下几点:
1、适合驱动8.2V~45V 2.5A以下的步进电机;
2、只有简单的步进和方向控制接口;
3、六个不同的步进模式:全、半、1/
4、1/8、1/16、1/32;
4、可调电位器可以调节最大电流输出,从而获得更高的步进率;
5、自动电流衰减模式检测/选择;
6、过热关闭电路、欠压锁定、交叉电流保护;
7、接地短路保护和加载短路保护。

《FDM彩色3D打印机系统设计与仿真》篇一一、引言随着科技的飞速发展,3D打印技术已成为现代制造业的重要一环。
其中,FDM(熔融沉积建模)技术以其简单、低成本、易于操作等优点,在3D打印领域中占据重要地位。
本文将详细介绍FDM彩色3D打印机系统的设计与仿真过程,旨在为相关研究与应用提供参考。
二、系统设计1. 硬件设计FDM彩色3D打印机的硬件设计主要包括打印平台、喷头、供料器、驱动系统等部分。
其中,喷头是核心部件,负责将热塑性材料加热至熔融状态并挤出,形成3D打印的实体。
供料器则负责为喷头提供稳定的材料供给。
此外,驱动系统需保证打印过程中的精确运动。
在硬件设计中,我们采用了高精度的步进电机和导轨,以确保打印过程中的精确度和稳定性。
同时,为了实现彩色打印,我们设计了多喷头系统,每个喷头负责不同颜色的材料。
此外,我们还采用了智能温度控制系统,确保喷头在不同颜色材料切换时能迅速达到合适的温度。
2. 软件设计软件设计是FDM彩色3D打印机的另一重要部分,主要包括控制系统和数据处理系统。
控制系统负责接收计算机发送的打印指令,并控制硬件设备完成打印任务。
数据处理系统则负责对3D 模型进行切片处理、路径规划等操作。
在软件设计中,我们采用了开源的3D打印控制软件,如Marlin或Klipper等。
同时,为了实现彩色打印功能,我们开发了相应的数据处理软件,支持多种颜色模型的导入和切片处理。
此外,我们还采用了用户友好的界面设计,方便用户进行操作和设置。
三、仿真分析为了验证FDM彩色3D打印机系统的设计效果,我们进行了仿真分析。
首先,我们建立了系统的数学模型,包括硬件和软件的各部分模型。
然后,我们利用仿真软件对系统进行了仿真测试,分析了系统的性能指标如精度、速度、稳定性等。
仿真结果表明,我们的FDM彩色3D打印机系统具有良好的性能表现。
在精度方面,我们采用了高精度的步进电机和导轨,确保了打印过程中的精确度和稳定性。
在速度方面,我们的系统能够在短时间内完成大量的打印任务。
皮带运输机驱动系统优化设计皮带运输机驱动系统优化设计近年来,皮带运输机在煤矿、矿石、大型仓库和物流等领域得到了广泛应用。
作为一种常见的连续式物料输送设备,皮带运输机的驱动系统是其核心组成部分之一。
优化驱动系统的设计,能够提高皮带运输机的工作效率和可靠性,降低能耗和维护成本。
一、驱动方式的选择与优化皮带运输机的驱动方式通常有机械驱动和电动驱动两种。
机械驱动系统通过减速机、电机和联轴器等传动装置驱动皮带运动。
电动驱动系统则采用电机直接驱动皮带。
两种驱动方式各有优劣,选择合适的驱动方式对于提高皮带运输机的工作效率至关重要。
在驱动方式的选择上,应考虑以下因素:1. 工作环境条件:压力、温度、湿度等环境条件直接影响驱动装置的选型。
如高温、潮湿的工作环境,电动驱动系统更适合;而机械驱动系统在一些较为恶劣的条件下更稳定可靠。
2. 功率需求:皮带运输机的功率大小是选择驱动方式的关键因素之一。
一般情况下,电动驱动系统适用于功率较小的皮带运输机,而机械驱动系统适用于功率较大的设备。
3. 维护成本:电动驱动系统相对于机械驱动系统来说,维护工作更加简单方便,所需维护成本也较低。
根据实际情况,选用最适合的驱动方式,能够提高皮带运输机的工作效率和可靠性。
二、减速机的设计与选择减速机是皮带运输机的重要组成部分,其质量直接关系到整个驱动系统的工作效率和可靠性。
在减速机的设计与选择中,需要考虑以下几个方面:1. 正确选用减速比:减速机的减速比直接影响到皮带运输机的速度和扭矩。
过小的减速比会导致皮带运输机速度过快,过大的减速比则会使得运输机在负载或启动时动力不足。
应根据实际需求选择合适的减速比,保证驱动系统的稳定性和运行效率。
2. 高效率设计:减速机的效率直接影响到能源的利用和消耗。
在设计和选择时,应优先考虑高效率的减速机,以降低能耗和节约运行成本。
3. 可靠稳定性:减速机作为皮带运输机的核心传动装置,应具备良好的可靠性和稳定性,能够适应高负载、长时间连续运转等恶劣工况。
7 皮带机输送控制系统(设计人员:)7.1设计目的(1)通过本设计,使学生掌握传统继电器-接触器控制电路与PLC的结合方法,从较高的层次对电气控制系统有系统的初步的认识。
(2)通过本设计,使学生初步掌握港口现场皮带传输系统的控制原理和方法。
7.2 设备概述及技术数据(1) 皮带机输送系统概述如图所示为某皮带机输送系统,物料经给料机、1#、2#皮带,然后根据挡板位置UP/DOWN,分别由3#、4#皮带流向1#、2#仓,现场和中控室设有急停按钮,当发生故障时按下,可使全线停机。
在中控室可对皮带系统进行手动和自动操作。
自动操作时,挡板在UP位置时,为1#流程;挡板在DOWN位置时,为2#流程。
(2) 技术数据供电电压:AC380V皮带电机 M1~M4:笼型异步电机,380V,30KW给料机电机 M5:380V,10KW挡板电机:380V,10KW7.3 设计要求(1) 控制要求a) 能够实现两个流程的自动控制。
b) 能够实现单机手动控制。
c) 上下游设备间要有互锁,保证设备顺序启动和停止。
d) 现场和中控室要有急停开关,以便发生故障时紧急停机。
e) 设有必要的电气保护(短路、过流、热保护)。
(2) 设计内容:a) 绘制电气控制原理图,包括主电路和控制电路,列出元件目录表。
b) 进行,列出I/O分配分配表。
c) 画出外部接线图。
e) 画出控制程序流程框图。
f) 设计控制程序(梯形图)。
目录一、设计目的···················二、设计任务书···················三、设计方案····················四、程序调试····················五、元器件的选择··················六、元件明细表···················七、控制柜的设计··················八、使用说明书···················九、总结······················十、参考文献····················十一、附录·····················一、设计目的通过对电气控制系统的设计,掌握电气控制系统设计的一般方法,能够设计出满足控制要求的电气原理图,安装布置图、接线图和控制箱的设计,并进行模拟调试。