三自由度稳定平台运动学分析
- 格式:ppt
- 大小:1.44 MB
- 文档页数:15
三轴云台运动学建模
三轴云台是一种常见的机械装置,用于稳定相机或其他设备,
使其能够在三个方向上进行运动。
在进行三轴云台的运动学建模时,我们需要考虑以下几个方面:
1. 旋转自由度,三轴云台通常包括俯仰(Pitch)、偏航(Yaw)和横滚(Roll)三个旋转自由度。
这些自由度可以通过欧拉角或四
元数等方式进行描述。
2. 运动范围限制,在建模过程中,需要考虑到三轴云台在每个
方向上的运动范围限制,以确保不会超出设备设计的工作范围。
3. 传动装置,三轴云台通常使用电机和传动装置来实现运动,
因此需要考虑传动装置的特性,如齿轮传动、带传动或直接驱动等。
4. 控制系统,运动学建模还需要考虑到三轴云台的控制系统,
包括传感器反馈、控制算法等,以实现精确的运动控制。
5. 动力学特性,除了考虑运动学特性外,还需要考虑三轴云台
的动力学特性,如惯性、加速度和扭矩等,以确保系统稳定性和响
应速度。
综上所述,三轴云台的运动学建模涉及到多个方面的考虑,需要综合考虑机械结构、控制系统和动力学特性,以实现精确、稳定的运动控制。
三自由度逆运动学三自由度逆运动学是机器人学中的重要内容之一,本文将以人类视角进行描述,详细介绍这一概念。
在机器人学中,逆运动学是指根据机器人的末端执行器的位置和姿态,计算出机器人关节的角度。
而三自由度逆运动学就是计算三个关节的角度的过程。
为了更好地理解三自由度逆运动学,我们可以想象一个机器人臂,它有三个关节,分别控制机器人臂的上下运动、前后运动和旋转运动。
当我们希望机器人臂达到特定位置和姿态时,就需要通过逆运动学来计算出每个关节的角度,以使机器人臂能够准确地到达目标位置。
我们需要确定机器人臂的末端执行器的位置和姿态。
这可以通过测量或者传感器来获取。
然后,我们需要将这些信息转化为数学模型,通过数学计算来求解关节角度。
在三自由度逆运动学中,我们可以使用向量和矩阵来表示机器人臂的位置和姿态。
接下来,我们需要根据机器人臂的运动范围和约束条件,确定每个关节的可行角度范围。
这可以通过机器人的结构和机械限制来确定。
然后,我们可以使用几何方法或者数值计算方法,根据机器人臂的数学模型和关节角度的约束条件,求解出每个关节的角度。
这一过程可以使用解析解法或者数值解法来实现。
解析解法是通过数学公式直接求解出关节角度,而数值解法则是通过迭代计算来逼近最优解。
我们可以将计算得到的关节角度发送给机器人控制系统,以控制机器人臂的运动,使其准确地到达目标位置和姿态。
通过三自由度逆运动学,我们能够实现机器人臂的精确控制,使其能够完成各种复杂的任务。
无论是在工业生产中的装配操作,还是在医疗领域的手术辅助,三自由度逆运动学都发挥着重要的作用。
三自由度逆运动学是机器人学中的重要内容,通过计算机算法和数学模型,能够实现机器人臂的精确控制。
它在工业生产、医疗等领域具有广泛的应用前景。
通过深入理解三自由度逆运动学,我们能够更好地掌握机器人技术,为人类的生产和生活带来更多便利和创新。
![毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]](https://uimg.taocdn.com/3ad4a49648d7c1c709a145a5.webp)
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
三自由度弹道方程
三自由度弹道方程是描述弹道运动的数学模型,通常用于分析导弹、火箭等飞行器的运动规律。
在弹道学中,我们常常需要考虑弹道飞行器在三维空间中的运动情况,因此引入了三自由度弹道方程。
三自由度弹道方程包括了弹道飞行器在三个方向上的运动状态,分别是水平方向、垂直方向和飞行器自身绕飞行方向的旋转运动。
这三个方向分别对应了三个自由度,通过这些自由度我们可以完整地描述弹道飞行器的运动状态。
在三自由度弹道方程中,我们通常考虑的力学因素包括重力、空气阻力、升力等。
这些因素会影响飞行器的运动轨迹和速度,因此我们需要将它们纳入方程中进行分析。
三自由度弹道方程的推导通常需要考虑飞行器的动力学模型和运动方程。
通过运用牛顿力学和动力学原理,我们可以建立弹道飞行器的运动方程,并通过数值计算方法求解这些方程,得到飞行器的运动轨迹和速度。
三自由度弹道方程在军事、航天等领域具有重要的应用价值,可以帮助我们设计飞行器的飞行轨迹、提高射程和精度,对于导弹、火箭等飞行器的设计和运动控制具有重要意义。
总的来说,三自由度弹道方程是描述弹道飞行器运动的重要数学模型,通过这些方程我们可以深入理解飞行器的运动规律,为飞行器的设计和运动控制提供重要的理论支持。
2021年5月农业机械学报第52卷第5期doi:10.6041/j.issn.1000-1298.2021.05.0411T2R并联机构拓扑降耦设计与运动性能分析沈惠平王达李菊孟庆梅(常州大学现代机构学研究中心,常州213016)摘要:根据基于方位特征(POC)方程的并联机构拓扑结构设计理论与方法,设计了一种能实现一平移两转动(1T2R)的并联机构,分析了该机构的方位特征(POC)、自由度(DOF)及耦合度(/)等主要拓扑特性。
由于该机构仅含#个耦合度/=1的子运动链(SKC)#得不到符号式位置正解#为此对其进行拓扑降耦设计,得到了零耦合度(k=0)、具有符号式位置正解、但POC/DO F保持不变的1T2R并联机构,并推导出其符号式位置正解和位置反解#基于雅可比矩阵对机构的奇异性进行了分析,基于符号式位置正解对机构的工作空间进行了计算分析。
基于符号式位置正解的工作空间计算方法具有无需预估工作空间范围、计算量少、工作空间边界计算精确等优点关键词:并联机构;耦合度;符号式解;工作空间;奇异性中图分类号:TH112文献标识码:A文章编号:1000-1298(2021)05-0370-08Topological Coupling-reducing Design and Kinematic Performance Analysiffor1T2R Parallel MechanismSHEN Huiping WANG Do LI Ju MENG Qingmal(Research Center for Advanced Mechanism Theory#Changzhou University#Changzhou213016#China)Abstraci:According to th a topology design theow and method of parallel machanism(PM)based on position and or/nta/on characteristic(POC)equations#a PM which can real/a one-Wan—a/on and two-wtation(1T2R)was designed.Tha main topological characteristics of th a PM,such os POC,deyreo of freedom(DOF)and coup/ng deyreo(/)were analyzed.It was shown that tha PM contained only one sub-kinema/c chain(SKC)and its coup/ng deyreo was one,but its symbolic diract position solutions could noJbeob ained.Only Jhe nume aical meJhods could be used o sol ee i s nume aical di aecJposi ion solutions.Therefore,the topology coup/ng-wducing design was carried out to obtain tha1T2R PM with zero coup/ng deyreo,symbolic diract position solutions but constant POC and DOF,bacauso zero coup/ng deyreo would benefit tha subsequent error analysis,trajectory planning,motion control and dynamic analysis of tha PM.Both tha symb/ic diract position solutions and inverse solutions were derived,and tha coiroctnes s of them were proved by example.Tha singulariPas of tha PM were analyzed based on tha Jocab/n matrix,and soma casas of tha s/gulor positions of tha PM were given by tha graphs.Based on symbolic diract position solutions,tha workspace of tha PM was calculated and analyzed,which was consistent with that obtained by tha/versa position solutions.At tha sama Wmo,F showed that tha w orkspace of tha PM was largo and tha shapa was reyulor.It was found that tha workspace based on symbolic diract position solutions had tha advantagos of less computation and occurata bounda aies.Key words:parallel mechanism;coup/ng deyreo;symbolic position solution;workspace;singularityo引言三自由度的一平移两转动(1T2R)并联机构具有制造方便、灵活、精度证等优点,目前仍是国内外学者的研究热点之一%SONG等]#*运用基何代数的,了两转动(1T2R)并联机构;汪满新等⑵研究了:UP和UPR-SPR型等效运动的1T2R并联机构的收稿日期:2020—06—29修回日期:2020—08—09基金项目:国家自然科学(51975062)作者简介:沈惠平(1965—),男,教授,博士生导师,主要从事机构学及并联结构研究,E-mail:shp65@#26.cam第5期沈惠平等:1T2R并联机构拓扑降耦设计与运动性能分析371拓扑综合方法;房立丰等[3]以一平移两转动并联稳定平台为例,研究了少自由度并联稳定平台拓扑结构设计方法;ENHIQUE等[4]对3-CUP的1T2R并联机构进行了运动学分析;HUSSEU等[5]对3-CHC的1T2R并联机构进行了运动学分析;SUNG 等[6]对具有封闭型正解的1T2R并联机构进行了运动学分析;SUN等[7]研究了含有限运动与寄生运动的并联机构拓扑综合问题;CHEN等[8]研究了无寄生运动的3-PHHU的1T2R并联机器人的动力学建模和性能;GAN等[9]提出基于可重构原理可在一平移两转动(1T2H)运动与纯旋转(3H)两种工作运动模式之间实现可重构性;ALI等[10]利用高速艇的运动模拟器(HSB),提出了一种新型的1T2R并联机构;SAIUA等[11"12]分析了2—PRU+1-PHS的1T2H并联机构的运动学、奇异性和动力学问题;JOSE等[13]对具有实时力/位置控制的1T2R型康复医疗并联机器人进行了模拟实验;XH等[14]提出基于1T2H并联机构的两种新型S接刀头,以用作模块化加工单元;车林仙等[15]采用智能算法求解了一平移两转动2-PUR+1-PSR并联机构的尺度参数优化设计问题;CHONG等[16]研究了3-HCU的1T2H并联机构的运动学优化问题%LIU等[17]研究了具有解析解的1T2R并联机构的类型综合。
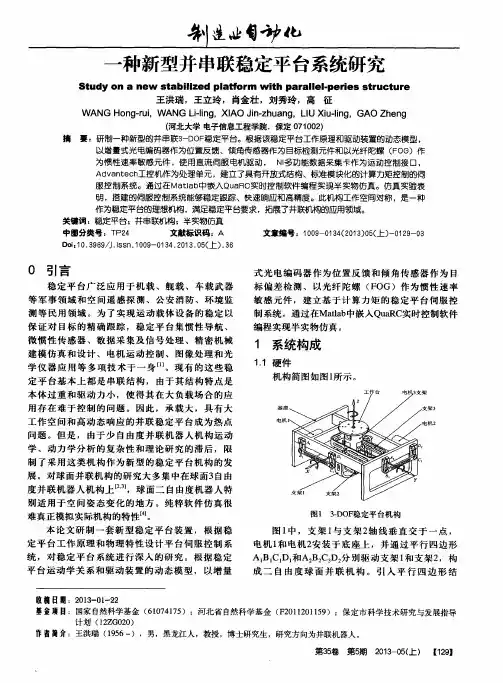
3自由度旋转台的动力学分析高征1肖金壮1王洪瑞1金振林21. 河北大学,保定,0710022. 燕山大学,秦皇岛,066004摘要:对3自由度旋转台进行了动力学分析。
该旋转台只有3个方向的转动自由度, 由2自由度球面并联机构和串联在其上的旋转电机构成。
根据旋转台的几何和运动特性建立了系统的输入输出速度方程, 得出了速度雅克比矩阵和动能方程。
利用拉格朗日法和虚功原理, 建立了系统的动力学模型, 解决了特定外载荷和速度、加速度条件下如何求解驱动力矩的问题。
给出了动力学的仿真运算实例, 讨论了在匀速和匀加速情况下, 2自由度球面并联机构驱动力矩的变化。
最后根据动力学方程, 得出了串联在2自由度球面并联机构上的第三个自由度的力矩与输出转角的运动学方程。
关键词:并联机构;旋转台;动力学;拉格朗日法;虚功原理中图分类号:TP242Dynamic Analysis on A 3-DOF Rotational PlatformGao Zheng1Xiao Jinzhuang1Wang Hongrui1Jin Zhenlin21. Hebei University, Baoding, 0710022. Yanshan University, QinHuangdao, 066004 Abstract: Dynamics is analyzed of a 3-DOF (degree of freedom) rotational platform. This rotational platform, which consists of a 2-DOF spherical parallel mechanism and a rotational degree connecting in series to the platform of the 2-DOF mechanism, has only 3 rotation freedoms. System’s input-and-output velocity functions are established according to rotational platform’s geometry and motion characteristics, and then obtain the velocity Jacobian metrics and energy functions. System’s dynamics model is established by Lagrange method and virtual work principle, and then the drive torque is solved when given the external load, velocities and accelerations. The examples are given of dynamics simulation. The drive torques’ changing curves of the 2-DOF spherical mechanism is discussed under the situation of uniform speed and acceleration. Finally, according to the dynamic functions, the third degree’s kinematics equation is obtained respecting to its torque and output angle.Key words: parallel mechanism; rotation platform; dynamics; Lagrange method; virtual work principle0 前言稳定平台系统是多学科有机结合的产物,其中精密机械动力学建模设计和仿真就是主要的应用技术之一[1]。
题目:三自由度机械手结构与原理研究学院:轻型产业学院专业:电气工程及其自动化姓名:丛榆坤指导教师:蔡小五完成日期:2014年5月11日毕业论文任务书毕业论文题目:三自由度机械手结构与原理研究选题意义、创新性、科学性和可行性论证:近年来,我国乃至世界三自由度机械手发展十分迅速,其数量和规模不断提高,所以对三自由度机械手的熟知变得愈发重要。
为体现出三自由度机械手的现实价值,在此我们对三自由度机械手结构设计与工作原理做一细致分析。
主要内容:基于对三自由度机械手的结构与原理分析,通过编写相关程序控制机械手运动。
首先,了解机械手的发展现状;其次,对其硬件的选择及软件的使用做一说明;最后,通过实验,使理论与实际相结合,观察机械手的运动状况。
目的要求:为了培养学生在实践中运用所学的专业知识,强调理论联系实际的学习态度,提高分析问题和解决问题的能力。
培养学生掌握计算机操作技术,运用计算机编写程序进行模拟操作。
计划进度:1. 毕业论文选题(2013.09.01~2013.10.31)2. 确定毕业论文写作提纲(2013.11.01~2013.12.31)3. 形成毕业论文初稿(2014.01.01~2014.02.28)4. 形成毕业论文修改稿(2014.03.01~2014.04.30)5. 形成毕业论文终稿(2014.05.01~2014.05.18)6. 答辩(2014.05.19~2014.05.26)指导教师签字:主管院长(系主任)签字:年月日辽宁大学本科毕业论文(设计)指导记录表论文题目三自由度机械手结构与原理研究学生姓名丛榆坤学号102703104 年级、专业2010级电气工程及其自动化指导教师姓名蔡小五指导教师职称副教授所在院系轻型产业学院第一次指导(对确定题目、毕业论文(设计)任务书的指导意见):确定论文题目为:三自由度机械手结构与原理研究独立查阅毕业论文资料。
围绕课题题目收集、阅读有关文献资料。
工业机器人集成应用(机构设计篇)1. 引言1.1 概述工业机器人是指具备自主控制能力、用于执行各类操作任务的智能化设备,广泛应用于制造业领域。
随着科技的不断进步和工业自动化水平的提高,工业机器人集成应用在生产线上扮演着越来越重要的角色。
机构设计作为其中至关重要的一环,对机器人的运动性能和功能实现起着决定性作用。
1.2 文章结构本文将围绕工业机器人集成应用中的机构设计展开论述。
首先介绍了引言部分,然后在接下来的章节中逐步深入探讨了机构设计理论、设计方法与标准以及常见案例分析等内容。
最后,通过总结已经探讨的主题点和结果展示,并对未来发展进行展望和建议。
1.3 目的本文旨在全面而系统地介绍工业机器人集成应用中机构设计理论与方法,并结合实际案例进行分析。
通过深入研究不同类型工业机器人的结构设计,可以帮助读者更好地理解机器人运动学和动力学基础,并提供一些标准化与规范化的要求。
此外,本文将对常见的工业机器人案例进行具体分析,以提供读者关于不同机构设计方案实际应用的启示。
通过本文的阅读,读者将能够更好地理解工业机器人集成应用中机构设计的重要性和挑战,并为未来该领域的发展提供有益参考。
2. 机构设计理论:2.1 功能需求分析:在进行工业机器人的机构设计之前,首先需要进行功能需求分析。
这包括确定机器人所需具备的基本功能,例如运动范围、负载能力、精度要求以及速度等。
通过对工作环境和任务要求的全面了解,可以确定机器人需要哪些关键性能指标。
功能需求分析为后续的机构设计提供了重要依据。
2.2 运动学基础:运动学是研究物体在空间中运动状态的学科。
在工业机器人的机构设计中,必须深入了解运动学基础知识。
这包括旋转和平移的数学描述方法、坐标系与坐标变换理论等内容。
掌握这些基础知识可以帮助我们更好地理解和描述机器人在三维空间中的姿态和位置变化。
2.3 动力学基础:动力学是研究物体受到力或力矩作用下产生加速度和角加速度变化规律的学科。
第23卷第1期石家庄铁道学院学报(自然科学版)v。
1.23N。
.12010年3月JOURNALOFSHIJIAZHUANGRAILWAYINSTITUTE(NATURALSCIENCE)M盯.2010考虑车身侧倾的三轴汽车三自由度操纵模型张伟,冯国胜。
贾素梅(石家庄铁道学院机械工程分院,河北石家庄050043)摘要:在两轴汽车三自由度操纵模型的基础上,利用拉格朗日方法详细推导出了三轴汽车三自由度操纵模型,该方法同样适用于其它多轴汽车的建模分析。
并给出了三轴汽车在已知整车回转角速度的情况下计算各车轮转速的方法。
关键词:三轴汽车;操纵模型;三自由度;侧倾中图分类号:U46文献标识码:A文章编号:1674’0300(2010)01.0041—060引言随着载货汽车向大吨位、高车速方向发展,多轴载货汽车不断得到应用…。
汽车的操纵稳定性不仅影响到汽车驾驶的操纵方便程度,也是决定高速汽车安全行驶的一个主要性能。
在汽车操纵稳定性研究中,常把汽车作为一控制系统,求出汽车曲线行驶的时域响应与频域响应,并以它们来表示汽车的操纵稳定性能‘21。
而要想求出汽车的时域响应和频域响应,首先必须建立车辆的操纵模型。
在两轴汽车三自由度操纵模型的基础上,利用拉格朗日法详细推导出了三轴汽车三自由度操纵模型。
1操纵模型假设在建立三自由度操纵模型之前,假定当汽车沿纵轴线方向行驶速度为一固定值时,忽略汽车的垂直运动和俯仰运动,忽略空气动力的作用,忽略汽车的滚动阻力,限制侧向加速度不超过0.4g,假设地面能够提供足够的纵向附着力,悬架刚度及轮胎侧偏特性均处于线性范围内,忽略转向系统,将输入直接施加于车轮。
车辆仅受平衡状态(如直线行驶或稳态转向)附近的小扰动,这意味着前轮输入转角足够小,从而保证车辆的运动方程为线性的。
这时,车辆操纵模型的三个自由度分别为:侧向速度秽、横摆角速度r、车身侧倾角西。
推导过程中,假设汽车质心位于前轮与中轮之间,而当汽车质心位于中轮与后轮之间时,只需将c用代入一C,公式形式均不变化。