并联三自由度运动平台动力学分析
- 格式:pdf
- 大小:705.73 KB
- 文档页数:4
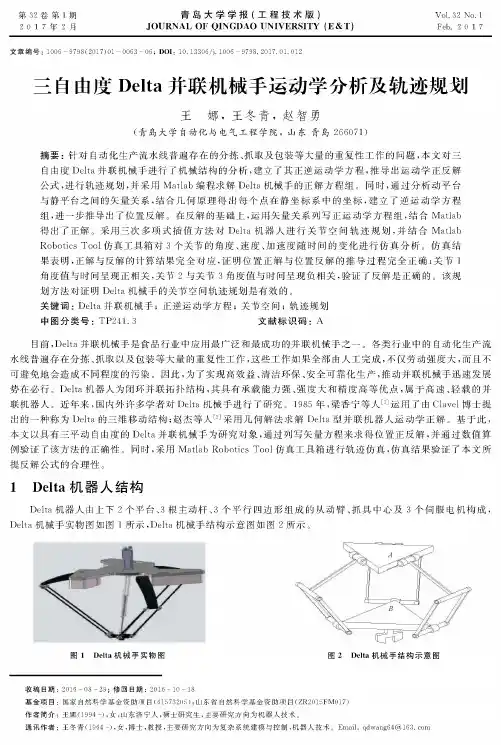
第32卷第1期青岛大学学报(工程技术版)Vol.32 N o.12 0 1 7 年 2 月JOURNAL OF QINGDAO UNIVERSITY (E&T) Feb. 2 0 17文章编号:1006 - 9798(2017)01 - 0063 - 06; DOI:10. 13306/j. 1006 - 9798. 2017.01.012三自由度Delta并联机械手运动学分析及轨迹规划王娜,王冬青,赵智勇(青岛大学自动化与电气工程学院,山东青岛266071)摘要:针对自动化生产流水线普遍存在的分拣、抓取及包装等大量的重复性工作的问题,本文对三自由度Delta并联机械手进行了机械结构的分析,建立了其正逆运动学方程,推导出运动学正反解公式,进行轨迹规划,并采用M a t l a b编程求解Delta机械手的正解方程组。
同时,通过分析动平台与静平台之间的矢量关系,结合几何原理得出每个点在静坐标系中的坐标,建立了逆运动学方程组,进一步推导出了位置反解。
在反解的基础上,运用矢量关系列写正运动学方程组,结合Matlab得出了正解。
采用三次多项式插值方法对Delta机器人进行关节空间轨迹规划,并结合MatlabRobotics T o o l仿真工具箱对3个关节的角度、速度、加速度随时间的变化进行仿真分析。
仿真结果表明,正解与反解的计算结果完全对应,证明位置正解与位置反解的推导过程完全正确;关节1角度值与时间呈现正相关,关节2与关节3角度值与时间呈现负相关,验证了反解是正确的。
该规划方法对证明Delta机械手的关节空间轨迹规划是有效的。
关键词:Delta并联机械手;正逆运动学方程;关节空间;轨迹规划中图分类号:TP241.3文献标识码:A目前,Delta并联机械手是食品行业中应用最广泛和最成功的并联机械手之一。
各类行业中的自动化生产流 水线普遍存在分拣、抓取以及包装等大量的重复性工作,这些工作如果全部由人工完成,不仅劳动强度大,而且不 可避免地会造成不同程度的污染。
![毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]](https://uimg.taocdn.com/3ad4a49648d7c1c709a145a5.webp)
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
3自由度并联机床的运动学和动力学研究摘要:中国东北大学已经研制出一种用于钢坯研磨的新型3自由度并联机床。
它具有结构简单,刚度大的优点,更高的力量重量比,较大的工作空间,简单的运动学方程,没有运动的奇异位姿。
在使用相应刀具情况下该机器人可用于磨削,研磨,抛光等加工过程。
在本文中,介绍了简单的机器人的结构和自由度,运动学和工作空间,精度分析,静态和动态的分析及其相关参数。
关键词:并联机床;运动学;动力学;3自由度1.前言与传统机床相比,并联机床具有更高的精度,高刚度的优点,和更高的刚度质量比,所以近些年它得到了行业和机构大量的研究和评估。
由美国Giddings & Lewis公司研制的“六足虫”并联机床被认为是21世纪机床领域中的革命性理念。
然而这个Stewart平台存在运动耦合的缺点,并且具有复杂的运动学和构件要求十分严格。
这类少于六自由度并联机床在行业和机构也因此受到越来越多的关注。
意大利Comau研制出了一种命名为Tricept的四条腿的的三自由度并联机床。
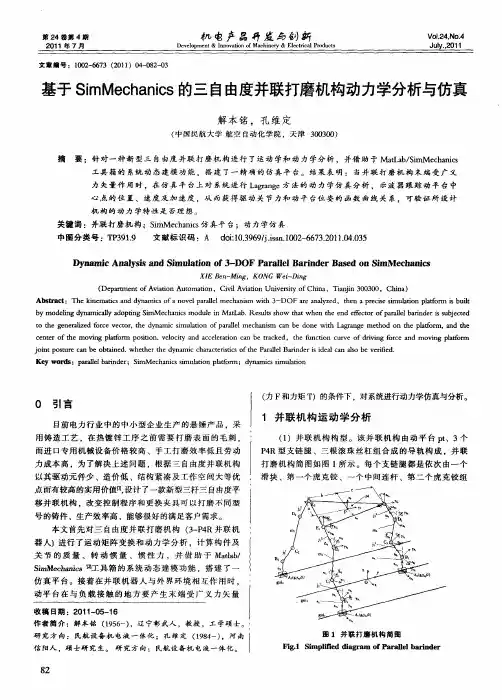
东北大学已经开发出了一种新型三自由度的三腿平行磨削机床(图1)。
与“六足虫”并联机床相比,此三腿平行磨削并联机床具有以下优点:(1)结构简单且具有更大工作空间;(2)动力学方程简单便于控制操作;(3)在工作空间没有运动耦合状态。
图12.并联机床2.1 3自由度系统的布局该三自由度并联机构由一个移动平台,基础平台,一个平行的联动和三条腿的连接两个平台。
中间腿支链控制的移动平台的三个自由,如图2所示。
移动平台的转换是由平行连杆机构控制。
图22.2 运动学和工作空间移动平台平行于基础平台,一个坐标系统(O- X,Y,Z)选择如图2所示,这种机制的逆向运动学正解方程可以表示为:123l l l ===其中w=a-b,2m = ,n=w/2 ,a 和分别表示基础平台的两侧的长度和等边三角形状的移动平台的长度。
该机构的位置正解方程可表示为:2222222132X l l w Y w Z =-+==从公式1和2可知系统在整个工作空间无奇异位姿和运动耦合。

AbstractParallelrobothasmoreadvantagesthanserialrobots.3degreeoffreedomparallelrobotisanimportantpartinthefamilyofparallelrobot.DeltaParallelRobotwithitshighspeed,highrigidity,highprecision,hastheadvantagesoflargeworkingspace.Itisintheindustrial,medicalandotherfieldsareplayinganimportantrole.Itisalsoincreasinglysubjecttopeople’Sattention.Inthispaper,byusingthedeltarobotastheresearchobject,analysesitscharacteristicsandmotionparallelsimulation.Theresearchcontentmainlyincludesmechanismcharacteristicmatrix.workspace,motionreliability.Parallelmechanismconfigurationandvariouspartsofthemotoroutputarethebasiccharacteristicsoftheparallelmechanism.FirstIobtainabranched(SOCS)featurematrixoftheparallelmechanism.ThenIthroughthestudyofparalleltheorem,synthesisofthebranchedmotion,Igetthewholecharacteristicmatrixofparallelmechanism.Theworkspaceisanimportantstandardtomeasurethequalityofparallelrobot.ItiSalsoanimportantcharacteristicofparallelmechanism.Accordingtothehelixstructureofdeltaparallelmechanism,lsetupthespacecoordinatesystem.Therelationbetweeninputsandoutputs.IestablishtheconstraintequationsandtheJacobimatrix.1establishequationaccordingtotheinfluenceofdexterityofparallelmechanism.1makethesizeparametersofthemechanismiSbetter.Imakethesizeparametersofthemechanismisbetter.Igettheworkingspaceofparallelmechanismbysurfaceenvelopeprinciple.Istudyontheeffectofdifferentparameterstotheworkspace,fmdthemethodtOoptimizetheworkingspace.Sincetheoriginalerrorsofdifferentinstitutionshavedifferentsources.MotionreliabilityisanimportantcharacteristicofDeltaparallelmechanism.1setupthemechanismpositionerrorcontainsthedimensionerror,mechanismofrotatingiointclearanceerroranderrorcalculationmodel.Igetthemotionreliabilityofmechanism.MotionreliabilityanalysisiSameasureofthestandardMotionaccuracyofthemechanism,andmotionreliabilityanalysisisabasicofmechanismoptimizationdesignanderrorcompensation.Finally,lcarriedonthemovementsimulationoftheDeltaParallelmechanism.Iestablishedthemodelof3DmodelingsoftwarewithSolidWbrks.inaccordancewiththeanalysisonthemechanismofconfiguration.ThroughtheestablishmentofSolidW|orksinterfacewithMatlab/SimLink.1willentitymodelintotheparallelmechanisminMatlab.GetconnectionmoduleintheMatlab/SimlinktoolboxinSireMechanics.1wereaddedtoactivememberandthemovingplatformmoduleandsensor.Getwiththeforwardsolutionofparallelmechanismdirectly.Andthecorrectnessofverificationmechanismmotionoutput,workingspace,motionreliabilityanalysisonthemechanismofpositivesolution.Keywords:DeltaParallelmechanism;Characteristicmatrix;Workspace;MotionReliability河北工程大学硕士学位论文厂(s)=五万丽(4.11)应用矩法(数理统计中的算法)可以近似的求得f(S)的均值和方差并通过蒙特卡罗法【381(是一种计算机化的数学方法)确定总位置误差的分布。
3自由度旋转台的动力学分析高征1肖金壮1王洪瑞1金振林21. 河北大学,保定,0710022. 燕山大学,秦皇岛,066004摘要:对3自由度旋转台进行了动力学分析。
该旋转台只有3个方向的转动自由度, 由2自由度球面并联机构和串联在其上的旋转电机构成。
根据旋转台的几何和运动特性建立了系统的输入输出速度方程, 得出了速度雅克比矩阵和动能方程。
利用拉格朗日法和虚功原理, 建立了系统的动力学模型, 解决了特定外载荷和速度、加速度条件下如何求解驱动力矩的问题。
给出了动力学的仿真运算实例, 讨论了在匀速和匀加速情况下, 2自由度球面并联机构驱动力矩的变化。
最后根据动力学方程, 得出了串联在2自由度球面并联机构上的第三个自由度的力矩与输出转角的运动学方程。
关键词:并联机构;旋转台;动力学;拉格朗日法;虚功原理中图分类号:TP242Dynamic Analysis on A 3-DOF Rotational PlatformGao Zheng1Xiao Jinzhuang1Wang Hongrui1Jin Zhenlin21. Hebei University, Baoding, 0710022. Yanshan University, QinHuangdao, 066004 Abstract: Dynamics is analyzed of a 3-DOF (degree of freedom) rotational platform. This rotational platform, which consists of a 2-DOF spherical parallel mechanism and a rotational degree connecting in series to the platform of the 2-DOF mechanism, has only 3 rotation freedoms. System’s input-and-output velocity functions are established according to rotational platform’s geometry and motion characteristics, and then obtain the velocity Jacobian metrics and energy functions. System’s dynamics model is established by Lagrange method and virtual work principle, and then the drive torque is solved when given the external load, velocities and accelerations. The examples are given of dynamics simulation. The drive torques’ changing curves of the 2-DOF spherical mechanism is discussed under the situation of uniform speed and acceleration. Finally, according to the dynamic functions, the third degree’s kinematics equation is obtained respecting to its torque and output angle.Key words: parallel mechanism; rotation platform; dynamics; Lagrange method; virtual work principle0 前言稳定平台系统是多学科有机结合的产物,其中精密机械动力学建模设计和仿真就是主要的应用技术之一[1]。
包 装 工 程第45卷 第3期 ·218·PACKAGING ENGINEERING 2024年2月收稿日期:2023-03-27基金项目:国家青年科学基金(E51505124);河北省自然科学基金(E2017209252);河北省高等学校科学技术研究重点项目(ZD2020151);唐山市机器人机构学理论基础创新团队项目(21130208D );唐山市基础研究项目(23130201E );华北理工大学重点科研项目(ZD-YG-202306-23);华北理工大学专业学位综合改革项目(ZD18010223-03)三自由度并联分拣机器人的动力学建模与仿真崔冰艳,桂小庚,曾鸿泰,李贺(华北理工大学 机械工程学院,河北 唐山 063000)摘要:目的 针对自动化生产线上分拣机器人的动力可控性问题,提出一种2UU-UPU 三自由度并联分拣机器人,以提高分拣的精度可控性。
方法 分析该机器人的机构自由度,以及各参数之间的关系,基于闭环矢量法建立并联机构的运动学逆解模型;利用拉格朗日动力学方程推导该机器人的动力学表达式,并进行数值计算,采用Matlab Simulink 和Adams 进行动力学联合仿真,对理论值和仿真值进行误差分析。
结果 揭示了该机器人动平台的运动规律,得到了驱动力矩曲线,理论值与仿真值的误差较小,3个驱动力矩的最大误差分别为0.379%、0.283%、0.146%。
结论 通过验证可知,该机构具有较好的动力学特性,这为后续电机的选型和精准控制奠定了基础。
关键词:2UU-UPU 并联机构;分拣机器人;动力学;分拣精度中图分类号:TH112 文献标志码:A 文章编号:1001-3563(2024)03-0218-08 DOI :10.19554/ki.1001-3563.2024.03.025Dynamic Modeling and Simulation of a 3-DOF Parallel Sorting RobotCUI Bingyan , GUI Xiaogeng , ZENG Hongtai , LI He(College of Mechanical Engineering, North China University of Science and Technology, Hebei Tangshan 063000, China) ABSTRACT: Aiming at the dynamic controllability of sorting robots in automatic production lines, the work aims to propose a 2UU-UPU 3-DOF parallel sorting robot to improve the accuracy and controllability of sorting. The relationship between the degrees of freedom and various parameters of the robot was analyzed, and an inverse kinematics model of the parallel mechanism was established based on closed-loop vector method. The dynamics expression of the robot was derived using Lagrange dynamics equations, and numerical calculations were performed. The dynamic joint simulation of the robot was performed using Matlab Simulink and Adams, and the error analysis of the theoretical and simulation values was performed. The motion law of the robot's moving platform was revealed, and the driving moment curves were obtained. The error between the theoretical value and the simulation value was small, with the maximum error of the three driving torques being 0.379%, 0.283%, and 0.146%, respectively. It is verified that the mechanism has good dynamic characteristics, laying a foundation for the subsequent motor selection and precise control. KEY WORDS: 2UU-UPU parallel mechanism; sorting robot; dynamics; sorting accuracy随着生产线的智能化发展,产品的分拣已进入一个新阶段,特别是分拣机器人的研发,为生产线上的产品分拣注入了新的活力。
2024年第48卷第4期Journal of Mechanical Transmission一种3自由度并联抛磨机械臂的运动学分析包新棉1王学雷2张伟涛1王禄1赵栋杰1(1 聊城大学机械与汽车工程学院,山东聊城252000)(2 北京电子科技职业学院汽车工程学院,北京100176)摘要针对百叶窗叶片的仿形抛磨要求,研究了一种可为末端执行器提供X向、Y向的移动和Z 向转动的3自由度并联机械臂。
为了验证机械臂的运动学性能,首先,描述了其机构特征,并基于螺旋理论进行了机构自由度分析;其次,基于闭环矢量法构建了机构运动学方程,对其进行了位置正、逆解分析,并通过具体算例对分析结果进行了初步验证;最后,构建了机构的数值仿真模型和虚拟样机模型,进行了位置、速度的逆运动学仿真分析。
仿真结果表明,两种模型的分析结果一致,逆解理论分析结果可信;机械臂各支链可协调运动,运动过程平稳,位移、速度曲线平滑、无突变,可为后续机械臂的尺寸优化和运动控制提供依据。
关键词并联机械臂螺旋理论运动学虚拟样机Kinematic Analysis of a 3-DOF Parallel Polishing ManipulatorBao Xinmian1Wang Xuelei2Zhang Weitao1Wang Lu1Zhao Dongjie1(1 School of Mechanical & Automotive Engineering, Liaocheng University, Liaocheng 252000, China)(2 School of Automotive Engineering, Beijing Polytechnic, Beijing 100176, China)Abstract A 3-DOF parallel manipulator with X, Y movement and Z rotation for the end-effector is stud⁃ied in order to meet the requirements of copying and polishing of louver blades. In order to verify the kinematic performance of the manipulator, firstly, the mechanism characteristics are described, and the degree of freedom of the mechanism is analyzed based on the spiral theory. Secondly, the kinematics equations of the mechanism are constructed based on the closed-loop vector method, the forward and inverse position solutions are analyzed, and the analysis results are preliminarily verified by concrete examples. Finally, the numerical simulation model and virtual prototype model of the mechanism are constructed, and the inverse kinematics simulation analysis of the position and velocity is carried out. The simulation results show that the analysis results of the two models are consistent, and the result of inverse solution is reliable. The arm chain can coordinate the movement, the movement process is smooth, and the displacement and velocity curves are smooth and without mutation, and can provide a basis for the size optimization and motion control of the manipulator.Key words Parallel manipulator Spiral theory Kinematics Virtual prototype0 引言百叶窗具有良好的通风换气、防热降温功能,广泛应用于民居、大型厂房等场所。
收稿日期:1999211230;修订日期:2000206213基金项目:国家自然科学基金资助项目(59775049)和863高技术资助项目(8632512298204226)文章网址:h ttp : www .hkxb .net .cn hkxb2001 03 0217 文章编号:100026893(2001)0320217205三自由度3-CS 并联平台机构的运动学分析于靖军1,毕树生1,宗光华1,黄 真2(1.北京航空航天大学机器人研究所,北京 100083)(2.燕山大学机械工程系,河北秦皇岛 066004)K INE M AT I C ANALY SIS OF A 3-CS IN -PARALL EL PLATFOR M M ECHAN IS MW ITH THREE -D EGREE -OF -FREEDOMYU J ing 2jun 1,B I Shu 2sheng 1,Z ON G Guang 2hua 1,HU AN G Zhen2(1.Robo tics In stitu te ,Beijing U n iversity of A eronau tics and A stronau tics ,Beijing 100083,Ch ina )(2.M echan ical Engineering D epartm en t ,Yan shan U n iversity ,Q in H uangdao 066004,Ch ina )摘 要:首先介绍了一种新型的并联机构——三自由度32CS 并联平台机构的模型。
应用螺旋理论分析了该机构的瞬时运动。
同时对该机构进行了运动学分析:给出了操作平台的输出运动参数的3个运动约束方程和3个独立输出运动参数与3个独立运动输入参数之间的一阶速度影响系数矩阵,最后给出了求解机构位置正、反解的计算方法。
关键词:并联机构;机械手;运动分析;螺旋理论中图分类号:T P 24 文献标识码:AAbstract :W ith the developm en t of parallel m echan is m s research ,spatial i m perfect 2DO F parallel m echan is m s especially som e con strained 32DO F parallel m echan is m s have received mo re atten ti on fo r the advan tages of their si m p le structu re ,easy con tro l and low co st .In th is paper ,a novel model of con strained 32DO F parallel m an i pu lato r —32CS in 2parallel p latfo rm m echan is m is in troduced firstly .T he in stan taneou s po ssib le mo ti on characteristics fo r th is m echan is m are analyzed in detail by app lying the screw theo ry .In additi on ,the first o rder k inem atic analysis of the 32CS m echan is m is discu ssed tho rough ly ,w h ich invo lves deriving th ree mo ti on con strain t equati on s fo r the ou tpu t mo ti on s of the m an i pu lato r and fo rm u lating the k inem atic influence m atrix (also called Jacob ian of the m echan is m )reflecting the velocity relati on sh i p betw een th ree independen t inpu t mo ti on s and th ree independen t ou tpu t mo ti on s in a clo sed fo rm .A t last ,the clo sed 2fo rm so lu ti on s are devel 2oped fo r bo th the inverse and fo rw ard po siti on k inem atics.Key words :parallel m echan is m ;m an i pu lato r ;k inem atic analysis ;screw theo ry 近年来并联机构已引起了国内外学者的广泛兴趣,并大量作为机器人的操作器应用。
摘要文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。
这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。
关键词:三自由度并联机构;构型;运动学;AbstractThe motion analysis, three degree of freedom parallel mechanism of a kind of decoupling motion is research, which consists of three orthogonal distribution chain, kinematic pair and the mechanism are rotational joints, constitute the mechanism of translational decoupling dynamic platform x, y, Z three direction; on the basis of research on configuration mechanism, analyzing its kinematics, derived the kinematics and inverse solutions of the parallel mechanism, analyzed the mechanism of input / output speed and acceleration, verify the characteristics of the mechanism motion decoupling. The dynamic analysis of the mechanism, control strategy, research of mechanism design and path planning, has the certain theory significance.Keywords: three degree of freedom parallel mechanism kinematics; configuration;第一章引言1.1 并联机器人的出现及特点并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,与目前广泛应用的串联式机器人在应用上构成互补关系,在新的历史阶段中,并联机器人还将有更为广泛的应用。