位置检测装置
- 格式:ppt
- 大小:1.37 MB
- 文档页数:46
简述常见位置检测装置及维护一、引言位置检测装置是工业生产中常用的设备,用于检测和测量物体的位置和运动状态。
它广泛应用于自动化生产线、机器人控制、医疗设备等领域。
本文将详细介绍常见的位置检测装置及其维护方法。
二、常见位置检测装置1. 光电传感器:光电传感器是一种使用光电效应进行检测的装置,通过光源和接收器组成,当被检测物体经过时,会遮挡光线,使接收器输出信号。
它主要用于检测物体是否到达指定位置或者是否存在。
2. 激光传感器:激光传感器是一种使用激光进行检测的装置,可以精确地测量物体的距离和位置。
它主要用于自动化生产线上对产品尺寸和形状的精确检测。
3. 磁性传感器:磁性传感器是一种使用磁场进行检测的装置,可以通过磁场变化来判断物体是否存在或者运动状态。
它主要应用于机械制造、航空航天等领域。
4. 压力传感器:压力传感器是一种使用压力进行检测的装置,可以测量物体的重量、压力和强度等参数。
它主要用于医疗设备、汽车制造等领域。
5. 触觉传感器:触觉传感器是一种模拟人类触觉的装置,可以精确地感知物体质地、形状和温度等信息。
它主要应用于机器人控制、医疗设备等领域。
三、位置检测装置维护方法1. 定期清洁:位置检测装置在使用过程中会受到灰尘和污垢的影响,影响检测精度。
因此,定期清洁是必要的。
可以使用软布或者专业清洁剂进行清洁,但要避免使用含酸性或碱性成分的清洁剂。
2. 检查电源:位置检测装置需要接通电源才能正常工作,因此需要定期检查电源线路是否正常连接,是否有松动或损坏现象。
同时还需要定期更换电池或者充电,确保电量充足。
3. 检查信号线路:位置检测装置通过信号线路与其他设备进行连接,在使用过程中可能会出现信号线路松动或者损坏的情况。
因此,需要定期检查信号线路连接是否正常,并及时更换损坏的信号线路。
4. 定期校准:位置检测装置在长时间使用后可能会出现误差,因此需要定期进行校准。
可以通过专业的校准工具或者软件进行校准。


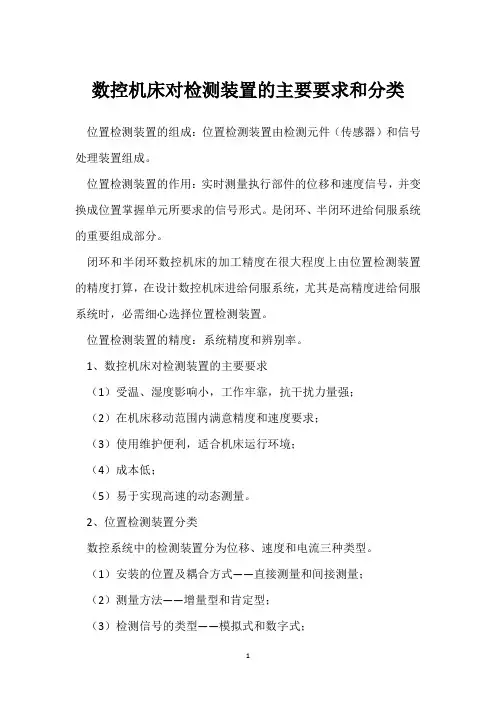
数控机床对检测装置的主要要求和分类
位置检测装置的组成:位置检测装置由检测元件(传感器)和信号处理装置组成。
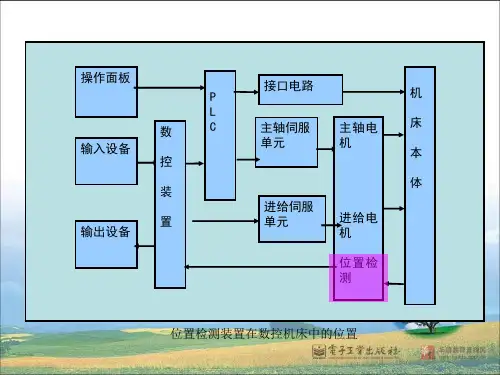
位置检测装置的作用:实时测量执行部件的位移和速度信号,并变换成位置掌握单元所要求的信号形式。
是闭环、半闭环进给伺服系统的重要组成部分。
闭环和半闭环数控机床的加工精度在很大程度上由位置检测装置的精度打算,在设计数控机床进给伺服系统,尤其是高精度进给伺服系统时,必需细心选择位置检测装置。
位置检测装置的精度:系统精度和辨别率。
1、数控机床对检测装置的主要要求
(1)受温、湿度影响小,工作牢靠,抗干扰力量强;
(2)在机床移动范围内满意精度和速度要求;
(3)使用维护便利,适合机床运行环境;
(4)成本低;
(5)易于实现高速的动态测量。
2、位置检测装置分类
数控系统中的检测装置分为位移、速度和电流三种类型。
(1)安装的位置及耦合方式——直接测量和间接测量;
(2)测量方法——增量型和肯定型;
(3)检测信号的类型——模拟式和数字式;
(4)运动型式——回转型和直线型;
(5)信号转换的原理——光电效应、光栅效应、电磁感应原理、压电效应、压阻效应和磁阻效应等。
位置传感器工作原理
位置传感器是一种能够测量物体位置的装置,它的工作原理可以简单地分为以下几个步骤:
1. 位置检测原理:位置检测是通过捕捉物体的位置变化来实现的。
位置传感器感知物体与参考点之间的距离或位置,帮助我们了解物体在空间中的准确位置。
2. 位置测量技术:位置传感器使用不同的测量技术来捕捉物体的位置变化。
常见的位置测量技术包括光学、电磁、压电和超声波等。
3. 光学位置传感器:光学位置传感器使用光的反射或透射来测量物体的位置。
它通常包括光源、透镜、光敏元件和信号处理电路。
光通过物体反射回传感器,并被光敏元件捕捉。
根据测量光的特性,可以计算出物体的位置。
4. 电磁位置传感器:电磁位置传感器使用电场或磁场来测量物体的位置。
它通常包括电磁发射器和接收器。
发射器产生一个电磁场,当物体进入该场中时,接收器会检测到场的变化,从而确定物体的位置。
5. 压电位置传感器:压电位置传感器是利用压电效应来测量物体的位置。
压电材料在施加力或压力时会产生电荷,根据电荷数量的变化可以确定物体的位置。
6. 超声波位置传感器:超声波位置传感器使用超声波的回波时
间来测量物体的距离和位置。
它通常通过发射超声波并接收其反射来实现。
根据超声波发射和接收之间的时间差,可以计算出物体的位置。
这些位置传感器工作原理的不同之处在于使用的技术和感知方式。
根据具体的应用需求,可以选择合适的位置传感器来满足不同的测量要求。
常见位置检测装置及维护概述位置检测装置是一种能够准确测量和追踪物体位置的设备。
常见的位置检测装置包括全球定位系统(GPS)、惯性导航系统(INS)、激光测距仪(LIDAR)等。
本文将对这些常见的位置检测装置进行详细介绍,并探讨它们的维护方法。
GPS(全球定位系统)GPS是一种卫星导航系统,通过接收卫星发出的信号来确定物体的位置。
它由一组卫星和地面控制站组成。
GPS设备通常包括接收器和天线两个部分。
工作原理1.GPS接收器接收卫星发出的无线电信号。
2.接收器通过计算信号的传播时间和信号传播速度以确定信号的传播距离。
3.使用多个卫星信号的传播距离,接收器能够计算出物体相对于卫星的位置。
4.GPS设备能够通过接收多个卫星的信号来提高测量的准确性。
维护方法1.定期检查天线的安装情况,确保天线没有受到物体遮挡或损坏。
2.定期检查GPS接收器的软件和固件更新,并及时进行升级。
3.清洁设备,防止灰尘和污垢影响接收器的性能。
4.定期校准设备,确保测量的准确性。
5.定期测试设备的接收性能和数据的传输速度。
INS(惯性导航系统)惯性导航系统是一种利用陀螺仪和加速度计等惯性传感器测量物体位置和方向的系统。
由于惯性传感器不依赖外部参考,INS能够提供精确的位置信息。
工作原理1.惯性导航系统由加速度计和陀螺仪等惯性传感器组成。
2.加速度计测量物体的加速度,陀螺仪测量物体的角速度。
3.通过积分加速度计的输出,可以得到速度和位移。
通过积分陀螺仪的输出,可以得到方向。
4.惯性导航系统还可以结合其他传感器,如GPS和罗盘,以提高位置测量的准确性。
维护方法1.定期检查并校准惯性传感器,以确保其精确性。
2.定期检查系统的电源和连接线路,确保正常供电和信号传输。
3.定期检查惯性导航系统的软件和固件更新,并及时进行升级。
4.避免设备受到强磁场干扰,以确保测量的准确性。
LIDAR(激光测距仪)LIDAR是一种使用激光束测量物体距离和形状的装置。
典型位置检测装置有哪些结构特点?(1)感应同步器感应同步器根据用途和结构不同分为直线式和旋转式。
直线式由定尺和滑尺组成,旋转式由定子和转子组成,前者用于测量直线位移,后者用于测量旋转角度。
感应同步器是一种电磁式位置检测元件。
直线感应同步器由作相对平行移动的定尺和滑尺组成,定尺和滑尺之间有0.25plusmn;0.05mm的均匀气隙。
定尺安装在机床导轨上,其长度大于被检测件的长度,滑尺较短,安装在运动部件上。
定尺和滑尺均由基板(钢或铝合金板)、平面绕组和保护屏蔽层等部分组成。
基板主要用于增强感应同步器的强度。
定尺保护层为耐切削液涂层,滑尺保护层为一层带绝缘的铝箔,起静电屏蔽作用。
平面绕组是感应同步器的关键部分,在定尺上是一个连续不断的矩形绕组,滑尺上分布两个长度方向相差1/4个节距的正弦绕组和余弦绕组。
绕组是将铜箔用绝缘粘合剂贴在基板上,并用印刷腐蚀制成的。
感应同步器安装时,两尺保持平行。
由于感应同步器工作条件较差,安装使用时应加强防护,最好使用防护带将尺面覆盖起来,以保证检测可靠。
(2)旋转变压器旋转变压器是一种间接测量装置,具有结构简单、动作灵敏、工作可靠、对环境条件要求低、输出信号幅值大和抗干扰能力强等特点,在数控连续控制系统中应用广泛。
旋转变压器又称为同步分解器,是一种控制用的微电机,结构与两相绕线式异步电动机相似,由定子和转子组成,如图4-16所示。
旋转变压器若装在数控机床的丝杠上,通过检测感应电动势可得到丝杠转角的大小,通过检测丝杠的转角值,可间接测得丝杠的直线位移量。
旋转变压器的测量精度一般为10rsquo;-30#39;。
(3)脉冲编码器脉冲编码器是一种把机械转角变为电脉冲的旋转式脉冲发生器,数控机床上常用的是光电脉冲编码器。
光电编码装置由光源、聚光镜、光电盘、光拦板、光敏元件、整形放大电路和数字显示装置组成,其工作原理如图4-17所示,光电盘装在回转轴上,轴的一端装有齿轮,与齿轮或齿条啮合时可带动光电盘转动;回转轴也可以直接与主轴、丝杠相连随之转动。