伺服系统与位置检测装置
- 格式:ppt
- 大小:3.80 MB
- 文档页数:119
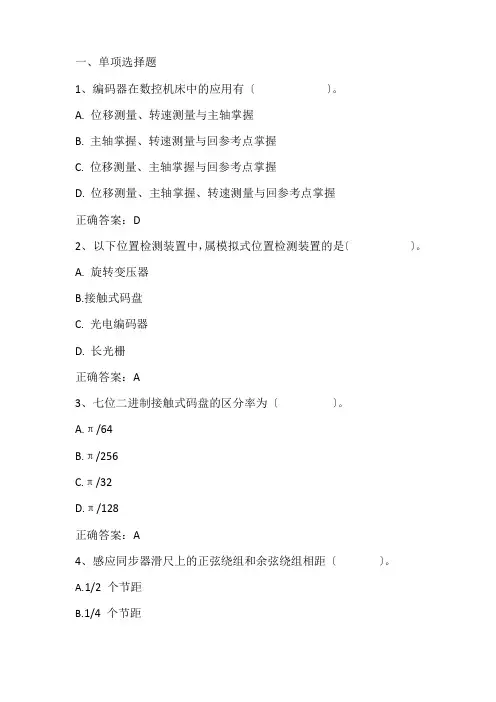
一、单项选择题1、编码器在数控机床中的应用有〔〕。
A.位移测量、转速测量与主轴掌握B.主轴掌握、转速测量与回参考点掌握C.位移测量、主轴掌握与回参考点掌握D.位移测量、主轴掌握、转速测量与回参考点掌握正确答案:D2、以下位置检测装置中,属模拟式位置检测装置的是〔〕。
A.旋转变压器B.接触式码盘C.光电编码器D.长光栅正确答案:A3、七位二进制接触式码盘的区分率为〔〕。
A.π/64B.π/256C.π/32D.π/128正确答案:A4、感应同步器滑尺上的正弦绕组和余弦绕组相距〔〕。
A.1/2 个节距B.1/4 个节距C.2 个节距D.1 个节距正确答案:B5、假设光栅尺的线纹密度为50 条/mm,经4 倍频鉴向计数电路处理后,其区分率为〔〕μm。
A.20B.5C.10D.2.5正确答案:B6、以下〔〕不属于通常所述的数控系统三环掌握构造中的伺服环路。
A.加速度环B.位置环C.电流环 D.速度环正确答案:A7、调速性能最好的电机是〔〕。
A.沟通电机B.直流电机C.步进电机D.直线电机正确答案:B8、以下不属于数控机床对主轴伺服系统的要求的是〔〕。
A.主轴与进给轴同步掌握B.角度分度掌握C.轴向定位掌握D.准停掌握正确答案:C9、以下方法能够实现他励直流伺服电机的调速,但是不经济且低速特性较软的是〔〕方式。
A.调整电枢电压UaB.调整电枢回路总电阻RaC.调整励磁磁通ΦD.调整转子线圈的相数正确答案:B10、在步进电机功率放大电路中,承受“高压建流、低压定流”工作方式的驱动电路是〔〕。
A.细分驱动电路B.调频调压电路C.凹凸电压驱动电路D.恒流斩波电路正确答案:C11、步进电动机的转速主要取决于〔〕。
A.电脉冲的总数B.电流的大小C.电脉冲的频率D.电压的凹凸正确答案:C12、设步进电机通电频率为1000Hz,步距角为0.1°,步进电机经过减速比为10 的齿轮减速后,通过螺距为3mm 的丝杠螺母副驱开工作台实现Z 向进给运动,则工件台的Z 方向的移动速度是〔〕m/min。
伺服系统包含哪些(基本组成_工作原理_应用)
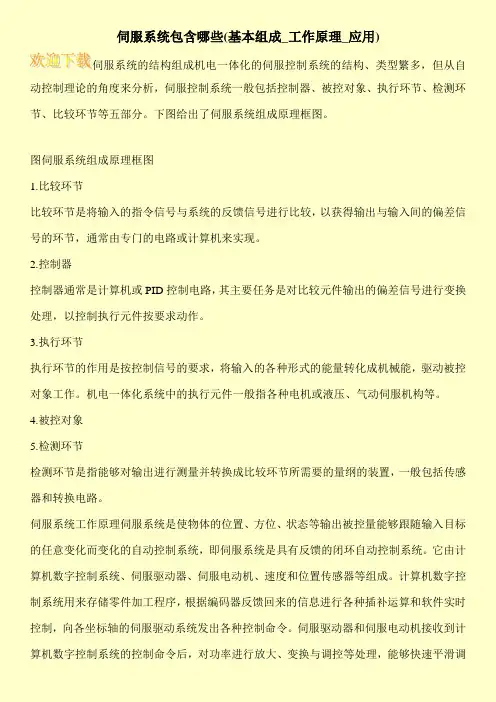
伺服系统的结构组成机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
下图给出了伺服系统组成原理框图。
图伺服系统组成原理框图
1.比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信
2.控制器
控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3.执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4.被控对象
5.检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
伺服系统工作原理伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标的任意变化而变化的自动控制系统,即伺服系统是具有反馈的闭环自动控制系统。
它由计算机数字控制系统、伺服驱动器、伺服电动机、速度和位置传感器等组成。
计算机数字控制系统用来存储零件加工程序,根据编码器反馈回来的信息进行各种插补运算和软件实时控制,向各坐标轴的伺服驱动系统发出各种控制命令。
伺服驱动器和伺服电动机接收到计算机数字控制系统的控制命令后,对功率进行放大、变换与调控等处理,能够快速平滑调。
数控机床位置检测装置的分类方法数控机床位置检测装置的分类方法对于不同类型的数控机床,因工作条件和检测要求不同,可以采用以下不同的检测方式。
下面就一起随店铺来了解下数控机床位置检测装置的分类方法吧。
1、增量式和绝对式测量增量式检测方式只测量位移增量,并用数字脉冲的个数来表示单位位移(即最小设定单位)的数量,每移动一个测量单位就发出一个测量信号。
其优点是检测装置比较简单,任何一个对中点都可以作为测量起点。
但在此系统中,移距是靠对测量信号累积后读出的,一旦累计有误,此后的测量结果将全错。
另外在发生故障时(如断电)不能再找到事故前的正确位置,事故排除后,必须将工作台移至起点重新计数才能找到事故前的正确位置。
脉冲编码器,旋转变压器,感应同步器,光栅,磁栅,激光干涉仪等都是增量检测装置。
绝对式测量方式测出的是被测部件在某一绝对坐标系中的绝对坐标位置值,并且以二进制或十进制数码信号表示出来,一般都要经过转换成脉冲数字信号以后,才能送去进行比较和显示。
采用此方式,分辨率要求愈高,结构也愈复杂。
这样的测量装置有绝对式脉冲编码盘、三速式绝对编码盘(或称多圈式绝对编码盘)等。
2、数字式和模拟式测量数字式检测是将被测量单位量化以后以数字形式表示。
测量信号一般为电脉冲,可以直接把它送到数控系统进行比较、处理。
这样的检测装置有脉冲编码器、光栅。
数字式检测有如下的'特点:(1)被测量转换成脉冲个数,便于显示和处理;(2)测量精度取决于测量单位,与量程基本无关;但存在累计误码差;(3)检测装置比较简单,脉冲信号抗干扰能力强。
模拟式检测是将被测量用连续变量来表示,如电压的幅值变化,相位变化等。
在大量程内做精确的模拟式检测时,对技术有较高要求,数控机床中模拟式检测主要用于小量程测量。
模拟式检测装置有测速发电机、旋转变压器、感应同步器和磁尺等。
模拟式检测的主要特点有:(1)直接对被测量进行检测,无须量化。
(2)在小量程内可实现高精度测量。
第5章 位置检测装置习题及答案1.伺服系统中常用的位置检测装置有几种?各有什么特点?答:伺服系统中常用的位置检测装置有:旋转变压器、感应同步器、脉冲编码器和光栅,各检测装置的特点如下:旋转变压器:又称同步分解器,是利用电磁感应原理的一种模拟式测角器件,是一种旋转式的小型交流电动机,在结构上和二相绕线式异步电动机相似,由定子和转子组成,分有刷和无刷两种。
其特点是坚固、耐热、耐冲击、抗干扰、成本低,是数控系统中较为常用的位置传感器;感应同步器:感应同步器是从旋转变压器发展而来的直线式感应器,相当于一个展开的多级旋转变压器。
踏实利用滑尺上的励磁绕组和定尺上的感应绕组之间相对位置的变化而产生电磁耦合的变化,从而发出相应的位置信号来实现位移检测的,其特点为:精度高,工作可靠,抗干扰能力强,维修简单、寿命长,测量距离长,工艺好、成本低、便于成批生产;脉冲编码器:脉冲编码器分为光电式、接触式和电磁感应式三种。
数控机床主要使用光电式脉冲编码器。
光电式脉冲编码器按编码方式又分为绝对值式和增量式两种,常用的为增量式脉冲编码器,其优点是结构简单、成本低、使用方便,缺点是有可能由于噪声或其它外界的干扰产生计数误差,若因停电、刀具破损而停机,事故排除后不能再找到事故发生前执行部件的正确位置;光栅:在高精度数控机床和数显系统中,常使用光栅作为位置检测装置。
它是将机械位移或模拟量转变为数字脉冲,反馈给CNC或数显装置来实现闭环控制的。
计量光栅分为圆光栅和长光栅两种。
圆光栅用于测量转角位移,长光栅用于测量直线位移,由于激光技术的发展,光栅制作的精度有了很大的提高,现在光栅精度可以达到微米级甚至亚微米级。
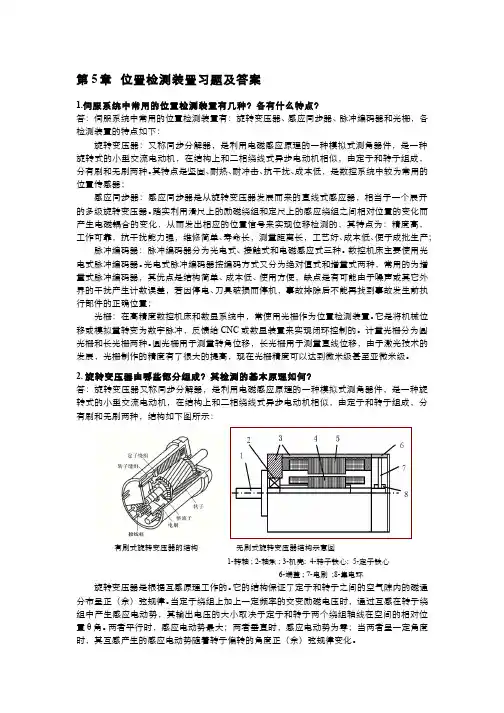
2. 旋转变压器由哪些部分组成?其检测的基本原理如何?答:旋转变压器又称同步分解器,是利用电磁感应原理的一种模拟式测角器件,是一种旋转式的小型交流电动机,在结构上和二相绕线式异步电动机相似,由定子和转子组成,分有刷和无刷两种,结构如下图所示:有刷式旋转变压器的结构无刷式旋转变压器结构示意图1-转轴 ; 2-轴承 ; 3-机壳; 4-转子铁心; 5-定子铁心6-端盖 ; 7-电刷 ;8-集电环旋转变压器是根据互感原理工作的。
1、数控机床自动编程有两种:软件编程和软件编程。
[APT、CAM]2、使用作位置检测装置的半闭环进给系统,一方面用它作实际位移反馈信号,另一方面作测速信号。
[旋转变压器]3、在数控编程时,是按照______来进行编程,而不需按照刀具的在机床中的具体位置。
[工件原点]4、数控车床自动换刀装置的刀架动作是刀架抬起、____ __、_____ __、_____ _。
[刀架转位、刀架定位、夹紧刀架]5、按照伺服系统类型,可将数控机床的控制系统分为、和。
[开环、半闭环、闭环]6、数控机床有着不同的运动方式,编写程序时,我们总是一律假定并规定为正。
[工件不动刀具运动、刀具远离工件的方向]7、普通数控铣床程序与加工中心编程的主要区别于。
[换刀程序]8、数控机床是由、、、、组成的。
[数控程序、计算机、外部设备、输入/出通道、操作面板]9、按所用的进给伺服系统的不同数控机床可为、、。
[开环、半闭环、闭环]10、NC机床的含义是数控机床,CNC是_ FMS是CIMS是。
[计算机数控机床、柔性制造系统、计算机集成制造系统]11、数控机床程序编制可分为、。
[手工编程、自动编程]12、脉冲编码器是一种位置检测元件,按照编码方式,可分为和两种。
[光学式、增量式、绝对式]13、一个零件加工的程序是由遵循一定结构、句法和格式规则的若干个组成的,而每个是由若干个组成的。
[程序段、程序段、指令字]14、圆弧插补加工时,通常把与时钟走向一致的圆弧叫使用_______指令,反之使用_______指令。
[G02、G03]15、对步进电机施加一个电脉冲信号,步进电机就回转一个固定的角度,这个角度叫做______,电机的总角位移和输入脉冲的_______成正比,而电机的转速则正比于输入脉冲的______。
[步距角、数量、频率]16、插补是指。
[将工件轮廓的形状描述出来,边根据计算结果向各坐标发出进给指令]插补的任务:跟据进给速度的要求,完成在轮廓起点与终点之间的中间点的坐标值的计算。