YS09无人机自动驾驶仪用户手册-GoogleEarth地图版
- 格式:pdf
- 大小:5.35 MB
- 文档页数:67
无人机数据处理完整解决方案操作手册目录1产品特点 (3)1。
1无人驾驶小飞机项目情况简介 (4)1.2数据处理软件技术指标 (4)1.3硬件设备要求 (4)1。
4处理软件要求 (4)1.5数据要求 (5)2数据处理操作流程 (6)2。
1数据处理流程图 (6)2。
2空三加密 (7)2.2.1启用软件FlightMatrix (7)2.2.1.1创建Flightmatrix工程 (7)2。
2。
1.2设置工程选项参数82。
2。
1.3自动化处理132.2。
1。
4DA TMatrix交互编辑162.2.1.5调用PA TB进行平差解算 (22)2。
3生成DEM、DOM (22)2。
4镶嵌成图 (26)2.4。
1启用软件EPT (26)2。
4.1.1导入MapMatrix工程生成DOM镶嵌工程 (29)2.4。
1.2编辑镶嵌线 (36)2.5图幅修补 (37)2.6创建DLG,进行数字测图 (38)1产品特点1)空三加密1.可根据已有航飞POS信息自动建立航线、划分航带,也可手动划分航带.2.完全摒弃传统航测提点和转点流程,可不依赖POS信息实现全自动快速提点和转点,匹配同影像旋偏角无关,克服了小数码影像排列不规则、俯仰角、旋偏角等特别大的缺点.即使是超过80%区域为水面覆盖,程序依旧能匹配出高重叠度的同名像点,整个测区连接强度高。
3.直接支持数码相机输出的JPG格式或TIF格式,无需格式转换.4.无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间。
5.实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像做去畸变即可完成后续4D产品生产。
6.除无人机小数码影像外,还适用于其它航空影像。
7.空三加密支持无外业像控点模式,方便快速制作挂图,满足相关需求。
8.专门针对中国测绘科学研究院二维检校场和武汉大学遥感学院近景实验室三维检校场检校报告格式研发了傻瓜式批处理影像畸变差改正工具,格式对应,检校参数直接填入,无需转换,方便空三成果导入到其他航测软件进行后续处理。
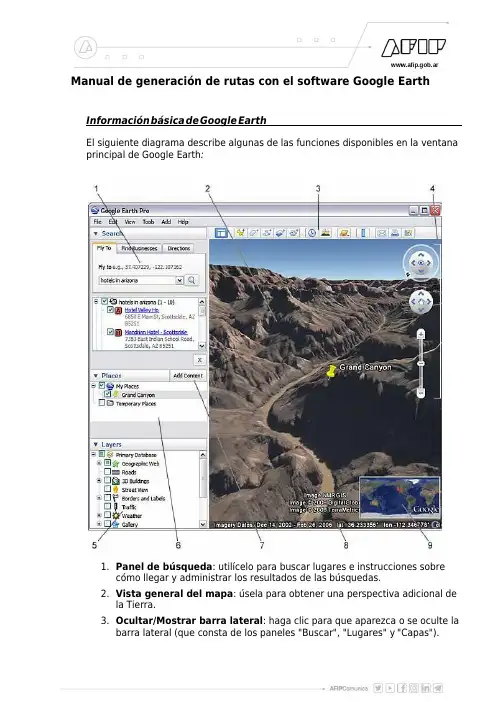
Manual de generación de rutas con el software Google Earth Informaciónbásica deGoogle EarthEl siguiente diagrama describe algunas de las funciones disponibles en la ventana principal de Google Earth:1.Panel de búsqueda:utilícelo para buscar lugares e instrucciones sobrecómo llegar y administrar los resultados de las búsquedas.2.Vista general del mapa:úsela para obtener una perspectiva adicional dela Tierra.3.Ocultar/Mostrar barra lateral:haga clic para que aparezca o se oculte labarra lateral(que consta de los paneles"Buscar","Lugares"y"Capas").4.Marca de posición:haga clic para añadir una marca de posición en unaubicación.5.Polígono:haga clic para añadir un polígono.6.Ruta:haga clic para añadir una ruta(una o varias líneas).7.Superposición de imágenes:haga clic para añadir una superposición deimagen sobre la Tierra.8.Medir:haga clic para medir una distancia o un tamaño deárea.9.Sol:haga clic para aplicar luz solar al paisaje.10.Cambiar al Cielo:haga clic para ver las estrellas,las constelaciones,lasgalaxias,los planetas y la luna de la Tierra.11.Correo electrónico:haga clic para enviar un mensaje de correoelectrónico con una vista o imagen.12.Imprimir:haga clic para imprimir la vista actual de la Tierra.13.Ver en Google Maps:haga clic para mostrar la vista actual en GoogleMaps,en el navegador web.14.Controles de navegación:utilícelos para inclinar,acercarte,alejarte,mirar y moverte alrededor de donde te encuentres(ver a continuación).15.Panel"Capas":utilícelo para mostrar los lugares de interés.16.Panel"Lugares":utilícelo para localizar,guardar,organizar y volver avisitar las marcas de posición.17.Añadir contenido:haga clic aquípara importar contenido de interésdesde la Galería KML.18.Visor3D:podráver el planeta y su relieve en esta ventana.19.Barra de estado:en ella se ven las coordenadas,la elevación,la fecha delas imágenes y su estado de streaming.Uso del ratónPara empezar a navegar con el ratón,basta con colocar el cursor en medio del visor(la imagen de la Tierra),hacer clic en uno de los botones(el derecho o el izquierdo),mover el ratón y fijarse en quéocurre en el visor.Según el botón del ratón que haya pulsado,el cursor cambiaráde forma para indicar que su comportamiento serádistinto.Moviendo el ratón mientras se pulsa uno de los botones se puede:arrastrar la vista en cualquier dirección,acercar o alejar la imagen,inclinar la vista(tendráque usar el botón central o la rueda dedesplazamiento),mirar alrededor desde unúnico punto de mira,girar la vista(tendráque usar el botón central o la rueda de desplazamiento).En la siguiente tabla se describen todas las acciones que puedes llevar a cabo moviendo el ratón.Uso de los controles de navegaciónPara ver y usar los controles de navegación,mueva el cursor sobre la esquina derecha del visor3D.Al iniciar Google Earth y mover el cursor sobre estaárea,los controles de navegación se van desvaneciendo cuando mueva el cursor a cualquier otro lugar.Para ver estos controles de nuevo,basta con mover el cursor sobre la esquina derecha del visor3D.Los controles de navegación de Google Earth ofrecen el mismo tipo de acciones de navegación que se pueden obtener con el ratón.Además,puede usar los controles para acercar o alejar la imagen y desplazarse(a lo mejor para ver una perspectiva o un relieve),asícomo girar la vista.En el siguiente diagrama se muestran los controles y se explican sus funciones.Dibujo de rutas y polígonosPuede dibujar rutas y polígonos sin forma definida en el visor y guardarlos en la carpeta Mis lugares igual que cualquier marca de posiciós rutas y los polígonos comparten todas las funciones de los datos de marcas de posición, incluido el nombre,la descripción,el estilo de vista y la ubicación.Siga estos pasos para dibujar una ruta.1.Coloque el visor de forma que se muestre la región que desea marcar.Cuanto más detallada sea la vista,con más precisión podráseguir los accidentes del relieve con su dibujo.En el menú"Añadir", seleccione Ruta(Ctrl+Mayús+T).Se abriráel cuadro de diálogo"Nueva ruta"o"Nuevo polígono"y el cursor cambiaráa una herramienta cuadrada de dibujo.Introduzca las propiedades(Nombre)de su dibujo igual que haría con cualquier otro tipo de dato de lugar.2.Consejo:cambie el color de estilo(ficha"Estilo,color")de la línea o del polígono en lugar de usar el color blanco predeterminado.De ese modo,se distinguirámejor la forma que va a dibujar.Haga clic en el visor para empezar su dibujo y utilice los siguientes métodos para conseguir la forma que desea:o Forma indeterminada:haga clic una vez,mantén pulsado elbotón del ratón y arrástrelo.El cursor cambiaráa una flecha haciaarriba para indicar que estáutilizando el modo de forma libre.Amedida que arrastre el cursor por el visor,la forma irásiguiendola ruta que marque.Si estádibujando una ruta,apareceráunalínea,y si estádibujando un polígono,una forma rodearála rutadel cursor,conectando siempre los puntos de inicio y final.o Forma regular:haga clic y suelte el botón.Mueva el ratón hastael nuevo punto y haga clic para añadir puntos adicionales.Eneste modo,el cursor no deja de ser una herramienta cuadrada dedibujo.Puede utilizar una combinación de estos modos de dibujo paracombinar bordes irregulares con bordes rectos.Para pasar del modode forma irregular al modo de forma geométrica,basta con soltar elbotón del ratón,colocar el puntero en un lugar distinto y hacer clic.Se dibujaráuna línea recta entre elúltimo punto y el más reciente.Invierte el proceso para entrar de nuevo en el modo de dibujo deforma irregular.Una vez terminada la generación de la ruta deseada con un doble clik del botón derecho del mouse,usted puede guardar en su computadora el resultado.Una vez cerrada la ventana de propiedades de la ruta creada,éstaúltima aparece en la barra lateral,dentro del apartado Mis Lugares,como un item mas de los que tenemos desplegados.Haga click con el botón derecho del mouse sobre el nombre dado a la ruta,apareceráun menúde opciones,del cual deberáelegir guardarcomo…En la pantalla de opciones de guardado,elegir laopción Kml(*.Kml),poner un nombre,y click sobre elbotón aceptar.Ya guardado en su disco rígido,el archivo Kml generado puedeser enviado por mail,o algúnotro medio disponible para su posterior ingreso en el sistema.。
GoogleEarth使用指南以下是维基百科全书对于GoogleEarth的定义:GoogleEarth是一款由Google公司开发的的虚拟地球仪软件,它把卫星照片、航空照相和GIS布置在一个地球的三维模型上。
让每个人都有机会看到世界上的任何一个角落。
GoogleEarth使用了公共领域的图片、受许可的航空照相图片、KeyHole间谍卫星的图片和很多其他卫星所拍摄的城镇照片。
图像清晰度:GoogleEarth包括大气层效果、海床和简要的星象,这里的“清晰度”衡量的标准是观察到离地面最近且图像最清晰时所显示的“Eyealt”数值。
大多数地区的图像清晰度都在5英里左右。
几乎每个国家的首都和主要大城市都提供了较为清晰的图像,基本拥有0.15英里的清晰度。
北美和欧洲的高清晰图像比较多,其他地区相比较少。
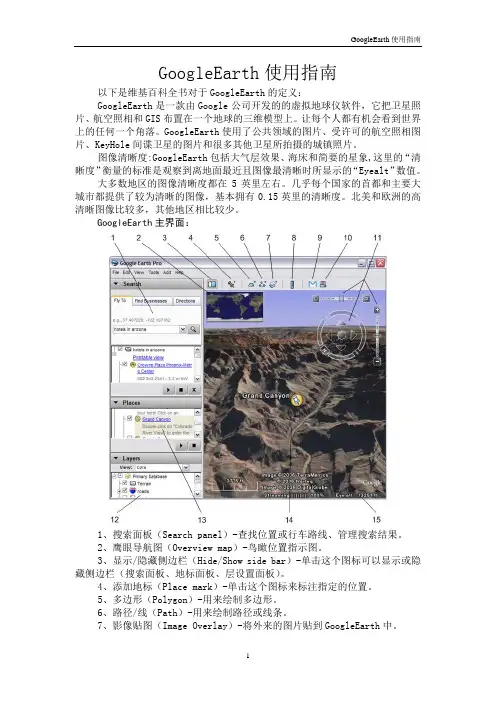
GoogleEarth主界面:1、搜索面板(Search panel)-查找位置或行车路线、管理搜索结果。
2、鹰眼导航图(Overview map)-鸟瞰位置指示图。
3、显示/隐藏侧边栏(Hide/Show side bar)-单击这个图标可以显示或隐藏侧边栏(搜索面板、地标面板、层设置面板)。
4、添加地标(Place mark)-单击这个图标来标注指定的位置。
5、多边形(Polygon)-用来绘制多边形。
6、路径/线(Path)-用来绘制路径或线条。
7、影像贴图(Image Overlay)-将外来的图片贴到GoogleEarth中。
8、测量工具(Measure)-测量距离或面积。
9、邮寄(Email)-将当前视图或图像用电子邮件发送给别人。
10、打印(Print)-打印当前浏览的视图。
11、导航器(Navigation controls)-用来倾斜、缩放和移动观察点。
(斜视滑块)12、图层(Layers panel)-用来显示兴趣点。
13、位置(Places panel)-用来定位、保存、组织和重游地标。
Google Earth操作指导华为技术有限公司版权所有侵权必究修订记录目录1 概述 (5)1.1 Google Earth简介 (5)1.2 MapInfo简介 (5)1.3 文章结构 (5)2 工具安装 (6)3 Google Earth基本操作 (7)3.1 Search (7)3.2 Places (8)3.3 Layers (9)3.4 工具栏 (10)3.5 Navigation controls (10)4 Google Earth在网络规划中的应用 (10)4.1 数据导入 (11)4.1.1 基站信息 (11)4.1.2 仿真预测图 (19)4.1.3 路测数据 (20)4.2 数据查找 (20)4.3 移动基站位置 (21)4.4 数据导出 (21)5 附录 (21)5.1 Google Earth常用资源 (21)5.2 Google Earth缓存应用 (22)关键词:Google Earth MapInfo 网络规划摘要:Google Earth提供了高精度的卫星影像,能够有效地辅助网络规划。
本文简单的介绍了如何将Google Earth与网络规划相结合,以提高我们的工作效率。
缩略语清单:参考资料清单:Google Company Google earth user guide霍琼Google Earth使用指南卢鹏Google-earthGoogle Earth操作指导1 概述1.1 Google Earth简介Google Earth采用的3D地图定位技术能够把Google Map上的最新卫星图片推向一个新水平。
用户可以在3D地图上搜索特定区域,放大缩小虚拟图片。
Google Earth主要通过访问Keyhole 的航天和卫星图片扩展数据库来实现这些上述功能。
它含有美国宇航局提供的大量地形数据,未来还将覆盖更多的地形,涉及田园,荒地等。
其功能主要有:1. 结合卫星图片,以及强大的Google搜索技术,全球地理信息就在眼前。
v1.0 可编辑可修改产品名称Product name密级Confidentiality level:内部公开部门名称:产品版本Product versionTotal pages 共页Google Earth 使用指南(仅供内部使用)拟制:Prepared by 霍琼 38685日期:Date2007-1-23审核: Reviewed by 日期:Date审核: Reviewed by 日期:Date批准: Granted by日期:Date华为技术有限公司Huawei Technologies Co., Ltd.版权所有侵权必究All rights reserved修订记录 Revision Record目录第一章主界面介绍 (5)第二章如何与规划相结合 (13)第三章使用技巧 (24)第四章附件 (27)第五章参考文件 (27)第一章 主界面介绍下面就自上而下,自左而右介绍各个方面:1. 飞行定位栏的应用:飞行定位栏 位置/地点 标签栏图层栏主界面纬度经度数据流传输完成度视角海拔高度状态栏1)根据经纬度定位地标的方法在Search面板的Fly To输入框中,输入一个经纬度或地名,按回车,就可以直接“飞”到那个位置。
其间采用的那种动画效果,让我们产生一种遨游地球的奇妙感觉2)利用地名定位地标的方法在Search面板的Local Search 输入框中,输入一个地名(好像必须是省会城市),回车,就可以直接飞到那个位置。
2.图层栏layers的应用:Google Earth在卫星地图的基础上,提供了很多数据图层,图层打开会在相应的位置呈现各种数据。
具体操作是,在Google Earth左侧,找到一个叫图层(Layers)的设置,点中不同的图层,可以在Google Earth显示更多的信息,这里介绍主要的几个:1、选Terrain显示三维地势模拟(但是对显卡的3D有要求)2、选3D Building显示三维建筑物模拟(同样对显卡有较高要求)3、选Roads显示交通道路4、选Borders显示国界与州界5、选Dining显示各种餐厅6、选Logding显示可住宿的旅馆7、选Google Earth Community显示在Google Earth社区上,网友自己标记的地标。

YS09自驾+雨燕UA V的战术侦察傻瓜式教程V1.02012年2月目录1.云台锁定与无人机的关系 (4)2.雨燕-III无人机系统的安装过程 (4)1)机体安装 (4)2)折叠降落伞 (6)3)把降落伞放机体底部的伞舱中 (6)4)顶部舱室 (7)3.YS09自驾的接线面板 (9)1)接线面板的正视图 (9)2)各接口的定义(分为上中下三排) (9)3)第一排接口接口 (10)①GPS天线口 (10)②空速管口 (10)4)第二排接口 (11)5)第三排接口 (11)4.相关机载设备 (13)1)自驾、GPS天线和选配的数传电台 (13)2)电调和马达 (14)3)空速管 (14)4)两轴云台 (15)①关于正射云台 (15)②关于锁定云台 (15)5)照相机 (16)6)降落伞 (16)7)飞机(雨燕-III无人机) (16)8)机载设备的供电关系 (17)①两块电池 (18)②自驾的供电 (18)③RC接收机的供电 (18)④机载数传电台的供电 (18)9)简单总结YS09自驾接口面板与雨燕-III无人机机载设备之间的连接关系 (18)5.地面调试(非常重要) (19)1)地面设备的连接关系 (19)2)连通数据链路 (20)①两个数据链路 (20)②GCS的界面 (20)③“云台控制”对话框 (22)a)利用键盘或鼠标去手动控制云台(不管自驾在何种工作模式) (22)b)利用“拉近”和“拉远”按钮对摄像头进行调焦 (22)c)锁定兴趣点(自驾工作在自动模式) (22)④串口初始化 (23)⑤轨迹文件 (24)⑥语音播报 (24)3)与RC发射机相关的设置 (25)①工作模式的相关设置 (25)a)切换工作模式的方法 (25)b)RC接收机的打开与关闭 (26)②把RC发射机切换到手动模式 (26)③确定各通道行程 (26)④取消RC发射机上的所有混控设置和反向设置 (27)⑤确定RC发射机摇杆能正常工作 (27)a)摇杆与通道的对应情况 (27)b)飞翼相关的设置 (27)c)修正差动舵面的混控设置 (28)⑥确定开伞舵机的工作情况 (29)⑦失控保护设置 (29)⑧阶段小结 (29)4)舵面反向检测和反向设置(手动模式下) (30)①舵面反向设置的必要性 (30)②舵面反向检测和设置的一般步骤(即第一种检测方法) (30)③检查摇杆动作与舵面反应的关联情况 (31)④第二种舵面反向的检测方法(要么不用,要么只用于复查) (31)5)捕获关键舵位(手动模式下) (31)①捕获关键舵位的意义 (32)②捕获开伞舵位和关伞舵位 (32)③自动开伞保护高度设置 (33)④捕获差动舵面的中立位(第一种方法) (34)⑤捕获油门关键舵位 (34)⑥检测油门舵位的捕获情况 (35)a)自动模式下的油门控制检测 (35)b)油门控制方式设置 (36)⑦捕获云台关键舵位 (36)6)检查传感器数据 (37)①首先看自驾电池电压和舵机电池电压 (37)②然后看气压数值 (37)③再看加速度计数值 (37)④接着看GPS数据 (38)⑤最后看陀螺数据 (38)7)一般参数设置和调整 (39)①绝对不能改动的参数 (39)②云台相关的参数 (39)③几个角度限制 (39)④自动起飞的相关参数 (40)⑤其他参数 (40)8)PID参数设置和调整 (41)①检查自动起飞时的方向控制 (41)②试飞测试的重要性 (41)③首先要规划并上传一条测试航线 (41)a)生成单个航点 (43)b)“航线规划”对话框 (43)c)连续生成多个航点并形成航线 (43)d)删除航点 (44)e)距离测量 (44)f)移动航点 (45)g) 迅速定位某个关键位置 (45)h)删除航线、清除航迹与验证航线 (46)i)调整航点高度 (46)④自动起飞 (48)⑤捕获差动舵面的中立位(第二种方法) (48)⑥PID设置与调整 (49)⑦开伞回收 (50)6.正式飞行 (51)1)一些安全建议 (51)2)正式飞行 (51)3)安全回收 (52)4)退出系统 (52)5)回放轨迹文件 (53)7.厂家默认设置 (53)1.云台锁定与无人机的关系上图的八个子图都是一段航拍视频上的截图,按时间顺序排列为:->第一排左->第一排右->第二排左->第二排右->第三排左->第三排右->第四排左->第四排右。
逐步了解YS09V2.0(Part4:工作原理与故障处理篇)零度智控(北京)智能科技有限公司Zero UAV Science & Technology Co.,Ltd.2012 年2 月编制★本文通篇都很重要。
建议反复通读、精读。
一.舵面控制图解1:PWM信号与舵机控制注解:1)PWM信号平时为低电平,每隔2ms提升为高电平,并延续为1~2ms的脉宽。
2)舵机接收到PWM信号后,根据脉宽大小转动摇臂。
3)假设1ms脉宽对应逆时针最大转动角度+45度,那么2ms脉宽对应顺时针最大转动角度-45度。
4)摇臂转动,带动连杆伸展或收缩,使舵面转角发生变化。
5)假设+45度摇臂转角对应+20度舵面最大转角,那么-45度摇臂转角对应-20度舵面最大转角。
6)1.5ms脉宽对应0度摇臂转角,以及舵面中立位。
7)其余脉宽、摇臂转角和舵面转角对称分布。
8)以上数字仅供参考,请以厂家技术标准或具体用户设置为准。
9)附带提及:改变舵机物理孔位(或连杆长度),也可以改变舵面最大转角的大小。
10)电调也受PWM信号控制,根据不同脉宽输出不同电压到马达,改变马达的转速。
11)RC发射机中应预先取消一切舵机交联混控,并设置为固定翼模式。
同时取消四个舵机(AIL/ELE/RUD/THR)通道上的反向设置,而在GCS中进行相应设置。
在RC接收机的F/S(失控保护)项目中,把工作模式切换通道设为自动模式,地面调试时,关闭RC发射机,GCS上应显示当前工作模式为自动模式。
12)舵机控制与姿态控制通过转动舵机摇臂,带动连杆,改变舵面转角,来改变飞机的受力情况,就能改变飞机在不同轴向上的转动角度(即姿态和航向)。
反过来,想要飞机改变多少转动角度,也可以通过改变PWM信号的脉宽,来改动舵面转角的大小。
这样,姿态控制就能转化成舵机控制了。
★舵机控制实际就是自驾控制的基本内容。
除了飞行舵机(AIL/ELE/RUD)外,还有其他舵机,比如开伞舵机和云台舵机,基本控制原理都一样,就是自驾输出某个脉宽的PWM信号到舵机上,使舵机摇臂转过一定角度,然后拉动某个设备上的某个部件向某个方向运动。
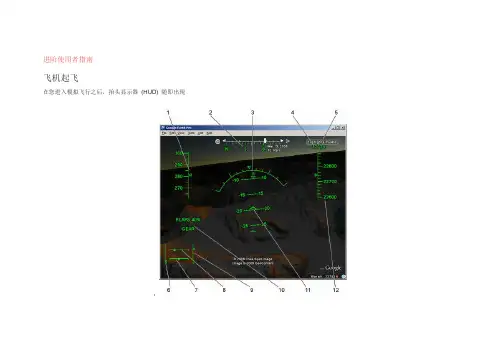
进阶使用者指南飞机起飞在您进入模拟飞行之后,抬头显示器(HUD) 随即出现:1. 速度(节)2. 朝向3. 倾角4. 垂直速度(呎/ 分)5. 结束仿真飞行功能6. 节流阀7. 方向舵8. 副翼9. 升降舵10. 襟翼与起落架指示器11. 俯仰角(度数)12. 海拔高度(海平面以上的呎数)若要隐藏或显示抬头显示器,请按下H。
您可以使用游戏杆或鼠标来执行仿真飞行功能。
若要使用鼠标,请按一下屏幕中央使光标变成+ (十字)。
若要随时暂停或继续执行模拟飞行,请按下空格键。
若要起飞,请按下Page Up 键来增加推力并沿着跑道移动。
当您的飞机开始移动时,请稍微向后移动鼠标或游戏杆。
当速度足够时,飞机便会起飞。
若要改变飞机方向或倾斜度,请稍微移动鼠标或游戏杆。
请小心不要修正过度。
当机翼平衡时,请将鼠标或游戏杆置中。
若要四处观看,请按下箭头键+ Alt (慢) 或Ctrl (快)。
键盘快速键。
飞机降落降落动作有点困难且需要一些时间练习。
若要将飞机降落:1. 接近要降落的机场或平坦区域。
2. 按下Page Down来降低推力和飞机速度。
3. 按下G 放下起落架。
4. 按下F 增加襟翼设定,以降低飞机速度。
5. 在您落地之后,请使用机轮煞车来减缓飞机速度。
按下, (逗号) 使用左轮煞车;按下 . (句号) 使用右轮煞车。
仿真飞行键盘控制本节说明可与「Google 地球」仿真飞行功能搭配使用的各种键盘组合。
若要进入「仿真飞行」模式,请按下Ctrl + Alt + A (Mac 上为 + Option + A)。
初次进入「仿真飞行」模式后,您可以利用选择[工具] > [进入模拟飞行] 再次进入。
若要离开「仿真飞行」模式,请按一下右上角的[结束模拟飞行],或按下Ctrl +Alt + A (Mac 上为 + Option + A)。
以下是控制导览和仿真飞行其它功能的按键。
您也可以利用鼠标或游戏杆控制飞机。
若要停用或启用鼠标控制,请按一下左键(在Mac 上为单次点击)启用鼠标控制后,画面上的指标形状会变成十字。

目录一、航测任务规划 (2)1.基本设置流程 (2)2.航测规划高级功能 (7)二、执行飞行任务 (10)1.起降场地选取 (10)2.设置任务/加载任务 (12)3.起降设置设置 (13)4.飞机连接 (18)5.飞机行前检查 (19)6.起飞教程 (20)7.监视及控制 (22)8.飞行着陆 (23)三、一键POS数据及照片导出 (23)一、航测任务规划航测作业要求严格遵守当地的法律法规,严禁将航测区域设置在禁飞区域内。
用户需对作业区域提前做实地考察,了解当地的地形地貌,城镇布局及人口密度等信息,为起降场地的选取,航线规划等提供依据。
下图为UAV GCS航测任务规划流程:1.基本设置流程(1)设置航测区域方法1:UAV GCS规划航测区域在地图中找到航测区域,建议使用“UAV”选项卡中“搜索位置”功能,找到航测区域位置。
点击右侧航测选项卡,在地面站地图显示区可见一个阴影多边形区域,单击拖动该阴影区域至所需航测位置,单击多边形的边增加多边形的顶点,通过拖动多边形的顶点可调整航测区域的范围及形状。
提示:如果点击航测选项卡后,地图区域没有显示阴影区域,可在地图区域点击右键,选择“重置航测区域于此处”即可。
方法2:导入KML文件生成作业区域若已在谷歌地球软件上规划好航测区域,可在地面站直接导入KML文件,生成作业区域。
具体操作:点击“UAV”菜单栏,点击“导入测区KML”,选择KML文件,地图区域将显示KML叠加区域,在区域中单击右键选择“从该kml创建航测区域”即可创建航测区域。
删除KML:在KML区域右键“删除该KML区域”即可删除该KML区域。
(2)设置航测参数在航测选项卡中按航测要求设定分辨率、飞行高度、航线角度与重叠率,其中飞行高度与分辨率互为影响,无人机飞行高度越高,飞行时获得的图像中每个像素所代表的地面距离就越大,单次作业面积越大。
●提示:增大横向重叠率航线密度增大,单位时间内作业面积会减少。
逐步了解YS09自驾(Part2:GCS篇)V2.0零度智控(北京)智能科技有限公司Zero UAV Science & Technology Co.,Ltd.2012 年2 月编制目 录一.使用GCS前要解决的问题 (4)1.简单说明 (4)1)运行GCS (4)2)调用GooGle Earth插件 (4)3)某些功能在数据连通前无法使用 (4)2.安装GoogleEarth软件 (4)3.连通串口 (4)1)驱动安装 (4)2)改串口号 (4)3)设置波特率 (5)4.了解GCS的基本内容 (6)1)GCS的主要任务 (6)①监测实时的飞行状态 (6)②离线分析飞行数据 (6)③辅助参数设置 (6)④可视化航线规划 (6)⑤实时的飞行控制2)GCS的基本操作流程 (6)2)GCS的基本操作流程 (7)①连通串口 (7)②检查传感器 (7)③检查RC设备(发射机和接收机)工作状态 (8)④捕获关键舵位 (9)⑤检查自驾的其他各项控制功能 (9)⑥手动模式下,规划测试航线并验证上传情况 (9)⑦飞行参数调整 (9)⑧起飞测试 (9)⑨正式飞行 (9)⑩安全回收 (10)二.GCS主界面 (10)三.重要对话框 (11)四.菜单栏 (13)1.文件 (13)1)离线模式 (14)2)轨迹数据回放 (14)3)照片数据回放 (15)4)打开数据接收 (15)5)关闭数据接收 (16)6)退出 (16)2.查看 (16)1)工具栏、状态栏、飞行状态、飞行控制和导航位置 (16)2)云台控制 (17)①利用键盘或鼠标去人工控制云台(不管自驾在何种工作模式) (17)②利用“拉近”和“拉远”按钮对摄像头调焦 (18)③锁定兴趣点(自驾工作在自动模式) (18)3)飞机居中显示和“立即飞往” (19)3.航线设置 (19)1)“从文件载入航线”与“保存航线到文件” (19)2)编辑当前航线 (19)3)上传航线到飞机 (22)4)下载飞机航线并验证 (23)5)删除航线 (23)4.工具 (23)1)常用PID参数设置 (24)2)高级PID参数设置 (25)3)保存参数到文件和上传参数到自驾 (25)4)高度空速清零 (25)5)清零陀螺 (25)6)测试姿态 (25)7)选项 (25)8)语音播报 (26)5.舵机反向 (27)6.捕获 (27)7.帮助 (28)五.工具栏 (29)1.多航点飞行选项组 (29)2.航线编辑选项组 (29)3.GoogleEarth地图视图选项组 (30)4.数据回放选项组 (31)5.遥测数据播放选项组 (32)六.地图区 (32)七.数据区 (33)1.电压数据 (33)2.其他数据 (34)1)GPS数据组 (34)2)加速度计数据组 (34)3)电池数据组 (34)4)自驾数据组 (34)3.飞行数据 (34)1)手控舵位数据组 (35)2)实际舵位数据组 (35)3)高度空速数据组 (35)4)数据数据组 (35)5)时间数据组 (35)6)其他数据组 (35)八.仪表栏 (35)九.状态栏 (36)十.实时控制区 (36)1.飞行状态下拉菜单 (36)2.改变目标航点 (37)3.改变目标高度 (38)4.拍照选项组 (38)5.设置选项组 (38)6.接收机选项组 (38)7.停车和开伞 (38)十一.出厂默认飞行参数 (39)一.使用GCS前要解决的问题1.简单说明1)运行GCS本GCS为绿色软件,无需安装,直接打开exe文件即可使用,但只能用于windows系统。
目录1 简介 (1)1.1系统特色 (1)1.2基本性能参数 (1)1.3物理参数 (2)1.4控制模式 (2)2 机载飞控系统 (3)2.1系统框架 (4)2.2模块介绍 (4)2.2.1飞控盒 (4)2.2.2 GPS&磁罗盘 (5)2.2.3 参数记录仪 (5)3 地面站软件 (6)3.1系统最低配置 (6)3.2软件介绍 (6)3.2.1 菜单栏 (6)3.2.2 工具栏 (7)3.2.3 HOME点区 (7)3.2.4 航迹点区 (8)3.2.5 控制面板区 (9)3.2.6 数据显示区 (10)3.2.7地图显示区 (10)3.2.8 仪表显示区 (11)3.2.9 状态栏 (12)4 飞行操作步骤 (13)5 异常情况处理 (15)1 简介CA2102自动驾驶系统是一款集GPS/INS组合导航和自动飞行控制于一体的无人直升机控制系统,可以对无人直升机这类稳定性差、高度耦合的飞行器进行稳定可靠的控制,并实现自动导航飞行。
1.1 系统特色●重量轻,功耗低,体积小;●使用简单方便,控制精度高;●集成6自由度IMU、高灵敏度GPS、磁场计和气压高度计。
采用带GPS修正的15阶扩展卡尔曼滤波组合导航算法,确保姿态、速度、位置数据精度更高;●飞行控制采用H∞鲁棒控制算法,环境适应性更强;●完全实现自主起飞和自动降落功能;●支持6种飞行控制模式:纯手动模式、自主起飞模式、增稳控制模式、航点飞行模式、自动返航模式、自动降落模式;●支持Google Earth地图,最多可设置40个航路点;●可设定多种安全保护模式。
如通信中断自动返航、接收机信号丢失自动悬停;●飞行中可修改航迹规划点,目标航点可实时修改;●飞行过程中自动进行协调转弯控制。
1.2 基本性能参数表1-1 基本性能参数注:该参数是在微风(1~2级)状态下的悬停精度,如若在风大的情况下,精度略为降低。
1.3 物理参数●重量●尺寸飞控盒:185克;飞控盒:120mm×70mm×60mm;GPS&磁罗盘:50克; GPS&磁罗盘:100mm×50mm×30mm;参数记录仪:20克;参数记录仪:60mm×40mm×20mm;●使用环境温度:-40℃~+80℃;湿度:5%~95%(非结露);●电源主电源:锂聚合物电池5000mAh/12V;1.4 控制模式【纯手动模式】系统保留了传统的手动控制模式,在这种飞行模式下,操控人员可将飞机作为普通遥控飞机进行操控,但要注意如果手动做过大机动动作后不宜切换到自驾模式飞行。
Google Earth用户手册翻译制作:Google Earth博客本手册翻译自英文版Google Earth官方网站,适用于Google Earth4.2或之前的版本本手册可以复制、修改、传播,但不可用于商业目的第1章:入门(网页版)欢迎使用Google Earth!一旦您下载并安装了Google Earth,您的电脑就变成了一扇通往世界任何地方的窗口,您不但可以查看高清晰的卫星照片和航拍图片,还可以查询道路、街道、商家列表等,更多请阅读本章的“Google Earth可以轻松做到的5件酷事”。
1.1揭开Google Earth的神秘面纱她是由Google公司开发的一款虚拟地球仪软件,她可以让我们每个人都有机会接触到世界上的任何一个角落,下面我们来认识一下她的主界面:1.搜索面板(Search)–用它来查找位置、行车路线或商业网点以及管理找到的结果。
2.纵览窗口(Overview map)–显示当前3D视图的远景视图。
3.显示/隐藏侧边栏(Hide/Show sidebar)-单击这个图标可以显示或隐藏左侧边栏(包括Search、Places、Layer面板)。
4.添加地标(Add Placemark)–在当前视图的中间位置创建一个地标。
5.多边形(Add Polygon)–绘制多边形。
6.路径/线(Add Path)–绘制路线。
7.覆盖图(Add Image Overlay)–将第三方的图片贴到Google Earth中,从而覆盖原来的卫星照片。
8.测量工具(Show Ruler)–测量距离或面积。
9.电邮(Email)–将当前视图用电子邮件发送给朋友。
10.打印(Print)–打印当前视图。
11.在Google Maps浏览(View in Google Maps)–单击这个图标会打开网页浏览器,将当前视图切换到Google Maps中浏览。
Earth))–在地球模式和星际模式之间切换,星际12.星际模式(Switch between Sky and Earth模式是4.2版本新增的最令人赞叹的功能。
逐步了解YS09自驾(Part3:基本操作篇)V2.0零度智控(北京)智能科技有限公司Zero UAV Science & Technology Co.,Ltd.2012 年2 月编制目录一.无人机系统的主要内容 (4)二.航线飞行 (4)1.可视化航线规划 (4)1)调整Google Eareth地图的观察视角 (4)①平面航线与立体航线 (4)②调整地图视角 (4)③利用详细地图地貌来规划航线 (5)2)可视化生成航线 (5)①单击地图生成航点 (5)②标注某个位置 (6)③对实地采集好位置信息的航点的处理办法 (6)④预设航点高度 (6)3)航线操作 (7)①保存航线和加载航线 (7)②移动航点 (7)③测量两点间距离 (7)④删除地图上的航线 (8)⑤下载并验证航线 (8)4)航点编辑 (8)①编辑单个航点 (8)②航点编辑对话框 (9)2.制式化航线规划 (9)3.实时更改目标航点与目标高度 (10)1)自动模式的作用 (10)2)信号丢失处理 (10)3)默认情况下的目标航点更改 (10)4)人工更改目标航点 (10)5)多航点飞行任务的暂停与继续执行 (11)6)临时刷新航线 (11)7)更改目标高度 (11)8)其他注意事项 (11)4.定点盘旋与指点飞行 (11)1)定点盘旋 (12)2)指点飞行 (12)5.锁定兴趣点 (12)6.自动起飞与降落伞自动回收 (12)1)装有起落架时的自动起飞 (12)2)橡皮筋辅助自动起飞 (13)3)弹射架自动起飞 (13)4)橡皮筋辅助起飞 (13)5)手动回收 (13)6)降落伞自动回收 (13)①使用RC发射机手动开伞 (13)②使用GCS上的开伞按钮来开伞 (14)③自动开伞保护 (14)7)无伞情况下使用自动模式来停车滑降 (14)三.图像采集 (15)1.关于照相 (15)1)快门线的接法 (15)①照相机外壳上自带快门线插口 (15)②照相机外壳上没有任何快门线插口 (15)2)拍照方式 (15)①手动拍照 (15)②航点自动拍照 (15)③自动定距拍照 (16)④制式拍照 (16)3)获取照片位置信息 (16)3.对于能自动调焦的摄像头 (16)4.对于云台 (16)1)两种云台 (16)2)对于正射云台 (16)3)对于锁定云台 (16)四.地面调试 (17)1.设备安装 (17)1)设备安放自身要求 (17)2)设备安放位置 (17)①自驾 (17)②RC接收机 (17)③数传电台 (17)④GPS (17)⑤云台 (17)3)设备配线连接 (17)2.连通串口 (18)3.检查传感器数据 (18)1)加速度计 (18)2)GPS (18)3)陀螺 (19)4)气压计和空速计 (19)4.键盘输入参数 (20)1)自驾电压和舵机电压 (20)2)常用参数设置(包括PID参数) (20)5.智能捕获舵机关键位(含舵机反向设置) (22)1)舵面反向设置 (22)①手动模式下进行舵面反向设置 (23)②自动模式下进行舵面反向检测 (23)2)捕获关键舵机位置(需要配合GCS来操作) (24)①最大油门位,最小油门位,停车位 (24)②开伞位和关伞位 (25)③云台控制位 (25)④舵机中立位 (26)一.无人机系统的主要内容从本自驾系统出发来看,无人机系统的主要内容就是航线飞行、图像采集和地面调试。
YS09系列自动驾驶仪用户手册V1.0零度智控(北京)智能科技有限公司Zero UAV (Beijing) Intelligence Technology Co.,Ltd.2015年4月编制目录1 免责声明 (1)2 简介 (2)2.1 YS09自动驾驶仪系统特性 (2)2.2 手册使用指南 (3)3 系统原理示意图 (4)4 飞控产品清单 (5)5 飞控部件介绍与组装 (6)5.1 飞控盒安装指南 (6)5.1.1 飞控盒安装 (6)5.1.2 飞控盒连接说明 (6)5.2 其他相关硬件介绍 (7)5.2.1 电源部分 (7)5.2.2 通讯链路-数字电台部分 (7)5.2.3 GPS部分 (9)5.2.4 空速部分 (9)6 接线说明 (10)7 遥控器设置 (11)8 地面站介绍 (12)8.1 硬件说明 (12)8.2 地面站软件简介 (12)8.3 地面站软件安装 (13)8.4 地面站软件详解 (13)8.4.1 菜单栏 (13)8.4.2 工具栏 (13)8.4.3 状态栏 (14)8.4.4 基本数据栏 (14)8.4.5 详细数据栏 (15)8.4.6 地图区域 (15)8.5 地面站软件参数说明 (15)8.5.1 文件菜单参数说明 (15)8.5.2 查看菜单参数说明 (16)8.5.3 工具菜单参数说明 (18)8.5.4 地图菜单参数说明 (19)8.5.5 设置菜单参数说明 (19)零度智控(北京)智能科技有限公司| 18.5.7 帮助菜单参数说明 (21)9 相关操作说明 (22)9.1 文件菜单 (22)9.1.1 打开串口 (22)9.1.2 关闭串口 (23)9.1.3 相片数据回放 (23)9.2 查看菜单 (24)9.2.1 开/关接收机 (25)9.2.2 开伞、停车 (25)9.3 工具菜单 (26)9.3.1 设计航线 (26)9.3.2 上传/保存航线 (28)9.3.3 验证航线 (29)9.3.4 加载航线 (29)9.3.5 加载上传拍照点 (30)9.4 地图菜单 (32)9.4.1 位置搜索 (32)9.4.2 下载地图 (32)9.4.3 其他功能 (33)9.5 设置菜单 (33)9.5.1 参数设置 (33)9.5.2 参数保存 (34)9.5.3 参数载入 (34)9.5.4 高度空速清零 (34)9.5.5 陀螺清零 (35)9.5.6 姿态测试 (36)9.5.7 舵机反向 (36)9.5.8 温度下载 (36)9.5.9 语音设置 (37)9.5.10 升级飞控 (37)9.6 捕获菜单 (38)9.7 帮助菜单 (39)9.7.1 飞控安装向导 (39)9.7.2 关于 (40)9.8 任务载荷 (40)9.8.1 正摄云台的安装与调整 (40)9.8.2 拍照 (40)2| 零度智控(北京)智能科技有限公司9.9 飞行控制方式 (41)10 现场调试(重要) (42)10.1 开机 (42)10.2 手操阶段 (43)10.3 紧急情况处理 (44)11 简易飞行流程参考 (46)12 典型应用 (47)附录 (48)附录A YS09自动驾驶仪出厂默认参数组 (48)附录B PID介绍 (48)附录C拼接图片示例 (50)附录D更新说明 (50)零度智控(北京)智能科技有限公司| 3零度智控(北京)智能科技有限公司| 免责声明11 免责声明 危险感谢您购买零度产品。
YS09无人机自动驾驶仪用户手册GoogleEarth地图版零度智控(北京)智能科技有限公司Zero UAV Science & Technology Co.,Ltd.2011 年12月编制目录目录 (2)一、简介 (4)1、系统特性 (4)2、阅读指南 (5)二、系统原理示意图 (6)三、产品清单 (7)四、机载飞控系统 (8)1、硬件简介 (8)1.1核心板外观 (8)1.2 飞控盒外观 (9)2、安装指南 (9)3 飞控接口 (10)4.其他部分 (14)4.1电源 (14)4.2通讯链路 (14)4.3 GPS (16)4.4 空速 (17)4.5 转速传感器 (17)4.6 熄火开关 (17)五、地面站系统 (18)1、硬件说明 (18)2、软件简介 (19)3、软件安装 (19)4、软件详解 (19)5、操作说明 (21)5.1 菜单栏 (22)5.2 工具栏 (35)5.3 状态栏 (36)5.4 仪表状态 (39)5.5 控制区域 (40)5.6 地图区域 (43)6、飞行控制方式 (44)六、相关功能介绍 (44)1、参数调整 (44)2、任务载荷说明 (50)3、高度调整 (54)4、开关接收机 (54)5、开伞、停车功能键 (55)6、自动生成航线说明 (55)七、现场调试(重要) (58)1、开机步骤 (58)2、手操阶段注意内容 (60)3、紧急状况处理 (62)八、简易飞行流程参考 (63)九、典型应用及免责声明 (64)1、典型应用 (64)2、免责声明 (65)附录 (67)一、简介YS09无人机飞控系统是一个高性能、低成本和微型化的无人机飞行控制系统,可以装载在不同的飞行平台上,可广泛用于科研实验、战术侦察、应急救灾、海事侦察、森林防火、影像航拍、人工增雨、农业勘察、管道巡检等领域。
1、系统特性4集成4Hz更新率GPS,可扩展北斗、GLONASS组合导航;4集成数字式空速、气压传感器,0.1mba高精度,高度测量可扩展无线电高度计;4集成低成本低重量IMU,通过带GPS修正的Kalman滤波计算最贴近真实情况的飞机姿态,动态精度±2º,消除瞬时加速度、陀螺漂移对姿态计算的影响;4定位系统可扩展差分GPS,实现精准航线控制与自动滑降;4可外接高精度惯性导航组件,各类AHRS、垂直陀螺,并可外接涡喷发动机电子控制单元(ECU);4可控制机载伺服云台转动,CCD变焦,算法可控制云台锁定地面固定目标;4等距离、定点曝光相机拍照控制,并在机上保存拍照时的飞机遥测参数;4实时修改、上传航线,实时调整飞行控制参数;4飞行操控手的所有操作动作均有数字记录,可回放分析操控过程;4实时显示3轴加速度值、3轴陀螺值等IMU传感器信息;47—20V宽电压输入,12位A/D采集电压监控;4多种PID组合控制算法,256~1024个任务航路点;4“傻瓜式”操作,多种飞行控制方式:全自主弹射起飞、全自主手掷起飞、全自主巡航飞行、全自主“一键式”回收、点哪飞哪、就地盘旋;4用户可设置的安全保护功能;电压监控、发动机转速监控,发动机灭车、意外安全保护;4支持实验室模拟飞行功能,足不出户预先判断飞行效果;49通道舵机输出,支持定时、定距控制拍照任务舵机动作,支持开伞、切伞、开舱、抛撒等舵机动作;4支持完全副翼转弯、压坡度横滚转弯,支持常规、V尾、H尾、三角翼等各种布局;4搭载在系留平台高空悬浮7天考核,经过军品装备验收程序严格考核,高低温、振动、冲击、电磁兼容等各项指标符合国军标。
2、阅读指南本手册第二章系统原理示意图,第三章产品清单,第四章是使用前的安装,将介绍如何把YS09自动驾驶仪安装在用户的飞行器上,并与飞行器系统的其他部分正确连接。
用户将YS09自动驾驶仪安装于飞行器上之前,应仔细阅读本章内容。
第五章是地面站软件的使用,将介绍YS09 软件的各项功能和相应的使用方法,包括遥测操作、记录及回放操作、地图设置、航线编辑、航线上传及下载、姿态遥控等内容。
第六章介绍相关功能;第七章介绍现场调试过程;第八章为参考飞行流程;第九章为典型应用与免责声明。
二、系统原理示意图图1 系统工作原理示意图三、产品清单飞控产品清单标准配置如下:1.YS09飞控一套2.减震架1个;3. GPS 天线1 套;4.飞控连接线1套;6、地面站1套,含国产433M电台一对、7db全向吸盘天线1根、0db小天线1根、12V DC电源适配器一个(为地面端电台供电),YS09地面站软件及使用说明光盘1张。
7、转速传感器一个。
(注:仅油动版飞控含转速传感器一个)四、机载飞控系统机载飞控系统主要是安装在飞机上的部分,包括飞控、电台、RC接收机、电池组、GPS天线、通讯天线、空速管。
正确安装这些部件是非常重要的,一定要严格按照安装要求安装并测试。
1、硬件简介1.1核心板外观正面图背面图图2 核心板外观图物理参数z尺寸:92.0mm×50.0mm;z重量:43g ;z存储温度:-40℃~+65℃;z工作温度:-20℃~+55℃;1.2飞控盒外观飞控盒尺寸:107mm×70mm×40mm ;外观颜色:黑色图3 飞控盒外观图图4 飞控外接连线2、安装指南安装方式:第一种:正向安装,飞控盒有线出来的方向为机尾方向,相反方向为机头方向;第二种:右转安装,飞控盒有线出来的方向朝左机翼方向,相反方向为右机翼方向;在安装驾驶仪之前,要求飞机必须已经完成了 RC 遥控试飞调整工作文中所有的飞机左右均是站在飞机后方向机头看来分辨左翼和右翼。
另外,飞机机舱内要尽量保证气压稳定,避免螺旋桨气流直接吹入飞控舱中,否则由于机舱内静态气压不稳定,将会导致气压高度计跳动和空速计跳动。
3 飞控接口3.1电动版图5 YS09接口示意图9空速接口:接空速胶管。
9指示灯:在YS09正常工作下,灯常亮,红色。
9GPS接口: 与GPS天线相连接。
(一定要拧紧,防止飞行中GPS丢星)9扩展端口:航空插头扩展(预留)。
9接收机部分:接收机部分,包含8通道输入信号线与接收机连接.1根5V电源线和1根地线,为接收机供电。
舵机输出及电源部分:插针接口排列表9序号1到8是输出到8个通道的舵机信号,分别为副翼、升、油门、方向、云台横滚舵机、云台俯仰舵机开伞、任务通道;9序号9通道是接舵机电源,用户可以将电池通过一个开关接到这个头上,舵机源电压监测显示在地面站软件数据状态里的“舵机电压”栏里;9序号10通道是点火电源输入,用户可将点火电池通过一个开关并联到这个插头里,点火电源电压监测显示在地面站软件数据状态里的“点火电压”栏里;9序号11通道连接相机拍照快门线,将其接到相机的快门线上,注意方向不要反向(信号和地有方向);9序号12通道接转速传感器输入信号,其为3针插头,与发动机的霍尔传感器连接。
9序号13通道电台信号输出,与电台的数据线相连。
9序号14通道接飞控电源输入,用户可将飞控电池通过一个开关接到这个插头上,电压范围为7~20V,飞控电压监测显示在地面站软件数据状态里的“飞控电压”栏里。
3.2油动版飞控盒出来的接口为:一个GPS天线接口、一个空速接口、一个26针大排插及一个备用的扩展口。
大排插出来的线分出来了3部分:(1)接收机及转速传感器部分,包含8通道输入信号线与接收机连接、1根输出到接收机的5V电源线和1跟与接收机连接的地线;以及1个转速传感器杜邦头,其为三针插头,与发动机的霍尔传感器连接。
图5 接收机部分接线(2)舵机及照相控制线部分,输出到8个通道的舵机信号杜邦头,分别为云台横滚舵机、云台俯仰舵机 、方向、副翼、升降、油门、开伞、任务通道;以及1个接舵机电池的杜邦头,用户可以将电池通过一个开关接到这个头上,舵机电压监测显示在地面站软件数据状态里的“舵机电压”栏里;以及1个相机拍照快门线,将其接到相机的快门线上,注意方向不要反向(信号和地有方向);图6 舵机及照相控制线部分接线(3)飞控电源、点火电源及电台部分9飞控电源输入,用户可将飞控电池通过一个开关接到这个插头上,电压范围为7~20V,飞控电压监测显示在地面站软件数据状态里的“飞控电压”栏里;9点火电源输入,用户可将点火电池通过一个开关并联到这个插头上;点火电压监测显示在地面站软件数据状态里的“点火电压”栏里。
9电台数据线,它是1个3针串口的公头,直接与机载电台的通讯数据线相连接;9电台电源线,它是1个2针母头为电台电源输出,直接与机载电台的电源线连接,给电台供电。
图7 飞控电源—两芯接头图8 电台信号—三芯接头4.其他部分4.1电源飞控板:YS09自动驾驶仪的供电电压是7~20V。
推荐客户使用3S锂电,标准电压11.1V,2200mA以上的锂电池。
接收机:电源由飞控提供,无需外接电源;舵机:外接电源,供电电压4.8~6V,并与自动驾驶仪的舵机输出共地。
驾驶仪在正常工作期间,若发生瞬间断电、瞬间电压过低现象,系统将会重新启动,这必将导致灾难性的飞行事故。
因此,必须绝对保证电池性能良好,电源系统的安装和连接必须绝对可靠。
安装时应遵循以下要求:9飞控必须使用独立的电源系统,舵机电源不得与驾驶仪共用同一个电源。
9电池放电特性必须稳定,安装时容量必须足以保证飞行时间需求。
9电池单元间的焊接必须牢固、可靠、绝缘良好。
9电池组的封装必须符合要求,安装必须减振防护。
9机身电源开关必须防振安装、防水处理。
9电源和电气系统的所有连接必须牢靠,所有接头必须防振处理。
9RC接收机由飞控供电,严禁单独通过电池给接收机供电,否则将损坏驾驶仪4.2通讯链路4.2.1遥控器设置以Futaba遥控器为例,设置步骤如下:设置步骤:z打开遥控器,选用一个出厂设置的模式或者恢复到出厂设置模式,并且设定为固定翼模式。
z取消遥控器上所有反向设置,舵机反向操作则由地面站设置。
z所有混控交联设置,混控由飞控来设置和控制。
z设定第5通道为手自动切换通道。
z设置第5通道失效保护F/S,首先切换到自动模式,然后找到F/S设置菜单,选择第5通道,行程设置为+92%。
测试F/S设置是否正确,关闭遥控器,地面站显示飞控处于自动状态,说明设置成功。
4.2.2 接收机部分接收机可选择Futeba的72M系列与2.4G接收机,通道要求8通道以上(含8通道)。
必须正确连接接收机,并且将接收机用海绵包裹减震安装。
接收机CH1 CH2 CH3CH4CH5 CH6 CH7 CH8连接线编号 1 2 3 4 5 6 7 8 功能副翼升降油门方向手自动切换保留开伞任务4.2.3 数字电台部分图9 数字电台该系统的通讯链路并不是YS09自动驾驶仪内部的一个模块,用户应使用外置的通讯链路模块来实现自动驾驶仪和地面控制软件间的通讯。