日本川崎工业机器人系统
- 格式:pptx
- 大小:1.26 MB
- 文档页数:13
机器人现场编程-川崎机器人AS系统与语言嘿,你知道吗?现在这科技发展得那叫一个快,机器人都能现场编程啦!今天咱们就来聊聊川崎机器人的 AS 系统与语言,这可真是个有趣又神奇的玩意儿。
前阵子我去一个工厂参观,那场面,真是让我大开眼界。
在生产线上,一排排的川崎机器人有条不紊地工作着,那动作精准得就像舞蹈演员在表演。
而这背后,就是强大的 AS 系统与语言在发挥作用。
咱们先来说说这个AS 系统。
它就像是机器人的大脑,掌控着一切。
从接收指令,到分析任务,再到指挥机器人的动作,每一个环节都安排得明明白白。
而且它还特别聪明,能根据不同的情况做出灵活的调整。
比如说,如果生产线上突然来了个加急订单,AS 系统能迅速重新规划工作流程,让机器人加快速度,保证按时完成任务。
这可太厉害了,就像一个超级管家,把一切都打理得井井有条。
再来说说这语言。
它可不是咱们平时说的那种日常语言,而是专门为机器人设计的一套独特的“暗号”。
通过这些“暗号”,咱们就能告诉机器人要做什么,怎么做。
而且这语言还特别简洁易懂,就算是像我这种对编程不太在行的人,学一学也能大概明白个七八分。
有一次,我看到一个技术人员在电脑前敲打着代码,旁边的川崎机器人就跟着动了起来。
只见那机器人的手臂灵活地伸展、弯曲,抓取零件,然后准确无误地安装到产品上。
我好奇地凑过去问技术人员:“这代码难不难写啊?”技术人员笑着说:“其实只要掌握了规律,就不难。
这就好比你学一门外语,刚开始觉得难,等入了门,就越来越顺了。
”在实际应用中,川崎机器人的 AS 系统与语言的结合,那效果简直绝了。
比如说在汽车制造厂里,机器人能快速准确地焊接车身,喷漆也能喷得均匀漂亮。
在电子厂,它们能精细地组装各种小零件,眼睛都不眨一下。
不过,要想熟练掌握川崎机器人的 AS 系统与语言,也不是一件容易的事。
得有耐心,还得细心。
有时候一个小错误,可能就会让机器人“犯迷糊”,做出错误的动作。
所以啊,编程的时候一定要认真再认真。

机器人现场编程-川崎机器人AS系统与语言机器人现场编程川崎机器人 AS 系统与语言在当今高度自动化的工业生产领域,机器人的应用日益广泛。
机器人现场编程作为机器人应用中的关键环节,对于提高生产效率、保证产品质量具有重要意义。
川崎机器人以其出色的性能和先进的技术在行业中占据了一席之地,而其 AS 系统与语言则为机器人的编程操作提供了强大的支持。
川崎机器人的 AS 系统是一个功能强大、易于使用的编程平台。
它具有直观的用户界面,使得编程人员能够快速上手,即使是对于没有丰富编程经验的人员来说,也能在较短的时间内掌握基本的操作。
通过 AS 系统,编程人员可以对机器人的运动轨迹、动作顺序、速度等参数进行精确的设定,以满足不同生产任务的需求。
在 AS 系统中,川崎机器人所使用的编程语言具有清晰的语法结构和丰富的指令集。
这种编程语言类似于常见的高级编程语言,如 C++或 Python,但又针对机器人控制的特点进行了优化和简化。
编程人员可以通过编写代码来实现各种复杂的机器人动作,例如直线运动、圆弧运动、关节运动等。
同时,还可以设置机器人的等待时间、输入输出信号的处理等,以实现与外部设备的协同工作。
为了更好地理解川崎机器人 AS 系统与语言的编程过程,我们以一个简单的搬运任务为例。
假设需要机器人将一个工件从 A 点搬运到 B点,首先,编程人员需要使用 AS 系统中的指令来定义机器人的起始位置和目标位置。
然后,通过设置运动速度和加速度等参数,确保机器人能够平稳、快速地完成搬运动作。
在这个过程中,还需要考虑机器人与周围环境的碰撞检测以及与其他设备的通信交互。
在实际的编程中,编程人员还需要充分考虑机器人的工作空间、负载能力以及精度要求等因素。
川崎机器人的 AS 系统提供了丰富的工具和功能,帮助编程人员进行这些参数的分析和优化。
例如,通过模拟功能,编程人员可以在虚拟环境中对编写的程序进行测试和验证,提前发现可能存在的问题并进行调整,从而减少在实际生产中的错误和停机时间。

川崎机器人跳转goto命令示教示例
摘要:
1.川崎机器人简介
2.跳转goto 命令的作用
3.跳转goto 命令的示教示例
4.跳转goto 命令的优势和应用场景
正文:
【1.川崎机器人简介】
川崎机器人(Kawasaki Robotics)是一家专注于工业机器人领域的日本公司,其产品广泛应用于各种制造业生产线。
川崎机器人以其出色的性能、稳定的可靠性和先进的技术而闻名于世。
【2.跳转goto 命令的作用】
在川崎机器人的示教过程中,跳转goto 命令是一种十分实用的功能。
它可以让机器人在执行过程中,根据特定的条件跳转到指定的位置,从而实现更高效、更精确的生产作业。
【3.跳转goto 命令的示教示例】
以下是一个跳转goto 命令的示教示例:
首先,需要设定跳转条件,例如:当机器人检测到某个特定的物体或者到达某个特定的位置时,执行跳转命令。
然后,设定跳转目标,即机器人跳转后需要执行的任务或者位置。
最后,在示教过程中,让机器人按照设定的条件和目标进行跳转,并确保其能够准确地执行跳转后的任务。
【4.跳转goto 命令的优势和应用场景】
跳转goto 命令的优势主要体现在其能够提高生产效率和准确性,同时降低人工干预的成本。
在工业生产中,这种命令可以广泛应用于各种需要精确控制和优化流程的场景,例如:装配、焊接、搬运等。
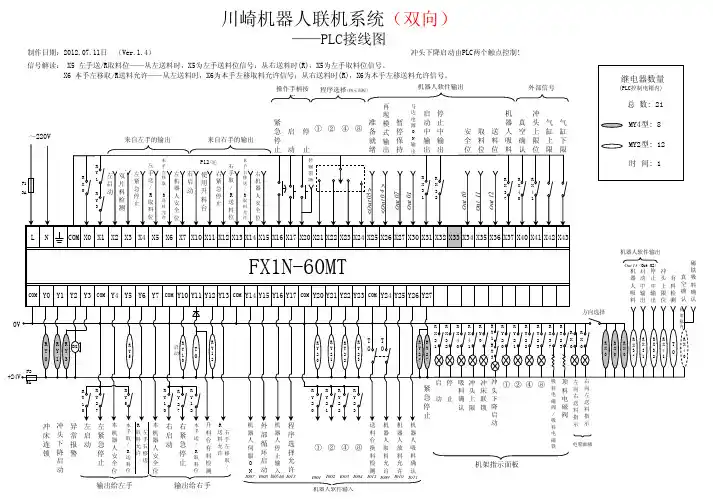
川崎工业机器人双机联网控制实现方法摘要:本文对川崎机器人的双机联网控制的方式进行了有益探索,实现了基于PLC、触摸屏、网络、机器人系统的双机联网控制。
并以双工码垛为工作任务,编制了相应的工作程序,运行效果良好。
关键词:双机联网工业机器人PLC 触摸屏网络工业机器人是面向工业领域的多关节机械手或多自由度的机器人。
工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。
工业机器人能够代替人类从事一些危险,繁重,精密,强度大的工作。
近年来工业机器人在我国的市场需求量越来越大,事实上中国的制造业正在迅速进入机器人时代。
为了适应社会的发展和满足市场对机器人技能人才的需求,上海工程技术大学高职学院引进了6套川崎工业机器人系统,将其用于教学及科研领域,以期更好地为社会及市场服务。
1 工业机器人的双机协调工作在现代工业生产中,通常采用双工业机器人乃至多台工业机器人进行协调作业。
双工业机器人能够有效地提高机器人系统的负载能力、作业空间、速度及可靠性。
因此,基于“HMI+PLC”系统的交互式离线编程成为双工业机器人控制的一个发展趋势。
同时,双工业机器人协调作业也对系统联网通信能力提出了较高的要求。
由于以太网支持的网络协议范围较为广泛,具有高速、低耗、易于安装和兼容性好等优点。
故本文设想在通用的计算机上进行双工业机器人协调作业的规划。
工业机器人采用HMI+PLC作为控制语言实现双工业机器人的协调作业。
在实际应用中,双工业机器人的配合使用可以解决很多单工业机器人无法解决的问题。
本文通过HMI+PLC构建网络,并通过该网络分别控制两台工业机器人。
在本文中通过该方法实现双工业机器人的简单联动,并以双工码垛为工作任务编制了相应的运行程序,运行效果良好,验证了该方法的可行性与可靠性。
本文的研究成果将有利于增加工业机器人系统的紧凑度,降低成本,提高系统的运行效率,同时也为工业机器人的管理和控制以及维修带来了便利。
川崎机器人产品介绍(二)引言概述:川崎机器人是一家领先的工业机器人制造商,其产品广泛应用于汽车制造、电子设备生产、医疗器械等行业。
本文将介绍川崎机器人的五大产品系列,包括机械臂、协作机器人、清洁机器人、教育机器人和特殊用途机器人。
每个产品系列都具有独特的功能和优势,能够满足不同行业的需求。
正文:一、机械臂系列:1. 灵活多变:川崎机械臂系列具有高度可编程性和灵活性,能够根据生产线的需求进行快速调整。
2. 高精度:川崎机械臂具有出色的定位精度和重复性,可实现精准的零件加工和装配。
3. 高负载能力:川崎机械臂可承载重物,适用于大型零件的搬运和装配。
4. 安全可靠:川崎机械臂配备有安全传感器和防护装置,确保操作人员的安全。
5. 易操作:川崎机械臂配备直观的人机界面,易于操作和监控。
二、协作机器人系列:1. 与人合作:川崎协作机器人具有先进的感应技术,能够与人类操作员共同工作,实现人机协同。
2. 灵敏度高:川崎协作机器人采用先进的力矩传感器和视觉系统,能够准确感知和响应环境变化。
3. 空间占用小:川崎协作机器人体积小巧,适用于空间有限的工作场所。
4. 多功能:川崎协作机器人能够执行多种任务,包括装配、包装、搬运等。
5. 高安全性:川崎协作机器人采用紧急停止和安全防护设计,确保操作人员的安全。
三、清洁机器人系列:1. 自动化清洁:川崎清洁机器人能够自动清洁生产线和设备,提高生产效率。
2. 多功能操作:川崎清洁机器人可执行除尘、拖地、擦窗等多种清洁操作。
3. 智能导航:川崎清洁机器人配备智能导航系统,能够自主规划清洁路径。
4. 省时省力:川崎清洁机器人能够减轻人工清洁工作的负担,节省时间和人力成本。
5. 高效节能:川崎清洁机器人采用高效清洁技术,减少清洁剂和能源的消耗。
四、教育机器人系列:1. 初级编程教育:川崎教育机器人适用于初级编程教育,帮助学生培养逻辑思维和创造力。
2. 多样性学习:川崎教育机器人可执行多种任务,如拼装、绘画、舞蹈等,丰富学习内容。

工业机器人全球排名前十名第一、发那科(FANUC)-日本是日本一家专门研究数控系统的公司,成立于1956年,是世界上最大的专业数控系统生产厂家,占据了全球70%的市场份额。
第二、库卡(KUKARoboterGmbh)-德国库卡(KUKA)及其德国母公司是世界工业机器人和自动控制系统领域的顶尖制造商,KUKA 产品广泛应用于汽车、冶金、食品和塑料成形等行业。
KUKA 机器人公司在全球拥有20多个子公司,其中大部分是销售和服务中心。
KUKA在全球的运营点有:美国,墨西哥,巴西,日本,韩国,台湾,印度和欧洲各国。
第三、那智(NACHI)不二越-日本NACHI不二越公司总工厂在日本富山,公司成立于1928年,除了做精密机械、刀具、轴承、油压机等外,机器人部分也是他的重点部分。
第四、川崎机器人-日本川崎机器人(天津)有限公司是由川崎重工业株式会社100%投资,并于2006年8月正式在中国天津经济技术开发区注册成立,主要负责川崎重工生产的工业机器人在中国境内的销售、售后服务(机器人的保养、维护、维修等)、技术支持等相关工作。
第五、ABBRobotics机器人-瑞典ABB集团位列全球500强企业,集团总部位于瑞士苏黎世。
ABB由两个历史100多年的国际性企业瑞典的阿西亚公司(ASEA)和瑞士的布朗勃法瑞公司(BBCBrownBoveri)在1988年合并而成。
两公司分别成立于1883年和1891年。
ABB是电力和自动化技术领域的领导厂商。
第六、史陶比尔(Staubli)-瑞士史陶比尔集团制造生产精密机械电子产品:纺织机械、工业接头和工业机器人,公司员工人数达3000多人,年营业额超过十亿瑞士法郎。
公司于1892年创建在瑞士苏黎世湖畔的Horgen市。
今天,史陶比尔发展成为一个跨国公司,总部位于瑞士的Pf?ffikon市。
第七、柯马(COMAU)-意大利柯马(COMAU)是一家隶属于菲亚特集团的全球化企业,成立于1976年,总部位于意大利都灵。
多年质保操作简单方便快捷—————————————————————————————————————————————现代工业生产中,由于各类产品的需求量日益增大,而人工的工作时间有限,很多时候不能满足生产需要。
在另一方面,有的工作需要在一定的环境条件下进行。
针对这些情况,日本川崎机器人能够比较好的进行解决。
接下来由安徽泰珂森智能装备科技有限公司为您简单介绍电焊机器人装备,希望能给您带来一定程度上的帮助。
点焊机器人的焊接装备,由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以变压器必须尽量小型化。
对于容量较小的变压器可以用50Hz工频交流,而对于容量较大的变压器,已经开始采用逆变技术把50Hz工频交流变为600~700Hz交流,使变压器的体积减少、减轻。
变压后可以直接用600~700Hz交流电焊接,也可以再进行二次整流,用直流电焊接。
多年质保操作简单方便快捷—————————————————————————————————————————————新型定时器已经微机化,因此机器人控制柜可以直接控制定时器,无需另配接口。
点焊机器人的焊钳,通常用气动的焊钳,气动焊钳两个电极之间的开口度一般只有两级冲程。
而且电极压力一旦调定后是不能随意变化的。
近年来出现一种新的电伺服点焊钳,如图4所示。
焊钳的张开和闭合由伺服电机驱动,码盘反馈,使这种焊钳的张开度可以根据实际需要任意选定并预置。
而且电极间的压紧力也可以无级调节。
安徽泰珂森智能装备科技有限公司集机械手、工业机器人系统集成研发、制造、销售、自动化控制工程承包于一体的综合性自动化技术企业。
公司在自动化领域具备充足的技术研发能力和丰富的项目经验,为各行业工厂量身订做适合、先进的自动化控制系统和解决方案。
多年质保操作简单方便快捷—————————————————————————————————————————————公司在机械加工及自动上下料、自动打磨抛光,包装物流及搬运,汽车零部件加工组装,无人化工厂解决方案等众多行业中拥有成熟的应用案例。