李雅普诺夫指数讲解
- 格式:pptx
- 大小:4.95 MB
- 文档页数:30
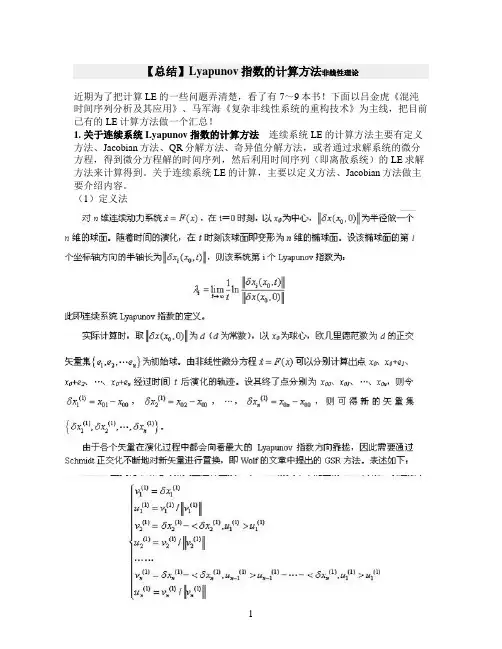
【总结】Lyapunov指数的计算方法非线性理论近期为了把计算LE的一些问题弄清楚,看了有7~9本书!下面以吕金虎《混沌时间序列分析及其应用》、马军海《复杂非线性系统的重构技术》为主线,把目前已有的LE计算方法做一个汇总!1. 关于连续系统Lyapunov指数的计算方法连续系统LE的计算方法主要有定义方法、Jacobian方法、QR分解方法、奇异值分解方法,或者通过求解系统的微分方程,得到微分方程解的时间序列,然后利用时间序列(即离散系统)的LE求解方法来计算得到。
关于连续系统LE的计算,主要以定义方法、Jacobian方法做主要介绍内容。
(1)定义法定义法求解Lyapunov指数.JPG关于定义法求解的程序,和matlab板块的“连续系统LE求解程序”差不多。
以Rossler系统为例Rossler系统微分方程定义程序function dX = Rossler_ly(t,X)% Rossler吸引子,用来计算Lyapunov指数% a=0.15,b=0.20,c=10.0% dx/dt = -y-z,% dy/dt = x+ay,% dz/dt = b+z(x-c),a = 0.15;b = 0.20;c = 10.0;x=X(1); y=X(2); z=X(3);% Y的三个列向量为相互正交的单位向量Y = [X(4), X(7), X(10);X(5), X(8), X(11);X(6), X(9), X(12)];% 输出向量的初始化,必不可少dX = zeros(12,1);% Rossler吸引子dX(1) = -y-z;dX(2) = x+a*y;dX(3) = b+z*(x-c);% Rossler吸引子的Jacobi矩阵Jaco = [0 -1 -1;1 a 0;z 0 x-c];dX(4:12) = Jaco*Y;求解LE代码:% 计算Rossler吸引子的Lyapunov指数clear;yinit = [1,1,1];orthmatrix = [1 0 0;0 1 0;0 0 1];a = 0.15;b = 0.20;c = 10.0;y = zeros(12,1);% 初始化输入y(1:3) = yinit;y(4:12) = orthmatrix;tstart = 0; % 时间初始值tstep = 1e-3; % 时间步长wholetimes = 1e5; % 总的循环次数steps = 10; % 每次演化的步数iteratetimes = wholetimes/steps; % 演化的次数mod = zeros(3,1);lp = zeros(3,1);% 初始化三个Lyapunov指数Lyapunov1 = zeros(iteratetimes,1); Lyapunov2 = zeros(iteratetimes,1); Lyapunov3 = zeros(iteratetimes,1);for i=1:iteratetimestspan = tstart:tstep:(tstart + tstep*steps); [T,Y] = ode45('Rossler_ly', tspan, y);% 取积分得到的最后一个时刻的值y = Y(size(Y,1),:);% 重新定义起始时刻tstart = tstart + tstep*steps;y0 = [y(4) y(7) y(10);y(5) y(8) y(11);y(6) y(9) y(12)];%正交化y0 = ThreeGS(y0);% 取三个向量的模mod(1) = sqrt(y0(:,1)'*y0(:,1));mod(2) = sqrt(y0(:,2)'*y0(:,2));mod(3) = sqrt(y0(:,3)'*y0(:,3));y0(:,1) = y0(:,1)/mod(1);y0(:,2) = y0(:,2)/mod(2);y0(:,3) = y0(:,3)/mod(3);lp = lp+log(abs(mod));%三个Lyapunov指数Lyapunov1(i) = lp(1)/(tstart);Lyapunov2(i) = lp(2)/(tstart);Lyapunov3(i) = lp(3)/(tstart);y(4:12) = y0';end% 作Lyapunov指数谱图i = 1:iteratetimes;plot(i,Lyapunov1,i,Lyapunov2,i,Lyapunov3)程序中用到的ThreeGS程序如下:%G-S正交化function A = ThreeGS(V) % V 为3*3向量v1 = V(:,1);v2 = V(:,2);v3 = V(:,3);a1 = zeros(3,1);a2 = zeros(3,1);a3 = zeros(3,1);a1 = v1;a2 = v2-((a1'*v2)/(a1'*a1))*a1;a3 = v3-((a1'*v3)/(a1'*a1))*a1-((a2'*v3)/(a2'*a2))*a2;A = [a1,a2,a3];计算得到的Rossler系统的LE为———— 0.063231 0.092635 -9.8924Wolf文章中计算得到的Rossler系统的LE为————0.09 0 -9.77需要注意的是——定义法求解的精度有限,对有些系统的计算往往出现计果和理论值有偏差的现象。

李雅普诺夫方法
李雅普诺夫方法(Lipunov Method)是一种分析系统的动力学性质的方法,它可以用来估计系统的稳定性和收敛性。
它也被称为“Lyapunov函数”或者“Lyapunov理论”。
这种方法最初是由俄罗斯物理学家谢尔盖·李·雅普诺夫(Sergi Lyapunov)提出的。
李雅普诺夫方法是一种可以用来评估系统的稳定性和收敛性的动态分析方法,它是基于系统中用于表示系统状态的状态变量的无穷级数而设计的。
这种方法被广泛应用于工程、科学和数学领域,用于对各种动力学系统的性能进行研究。
在李雅普诺夫方法中,通常使用一个叫做Lyapunov函数的函数来表示系统的状态。
Lyapunov函数是一个满足特定条件的函数,它表示系统当前状态与其原始状态之间的差异。
Lyapunov函数的计算依赖于系统中的状态变量,因此,通过计算Lyapunov函数,可以检测出系统内部是否存在不稳定性(即状态变量的变化率大于期望)。
李雅普诺夫方法可以用来识别系统的稳定性,以及在系统状态发生变化时,系统的性能如何受到影响。
在工程和科学应用中,李雅普诺夫方法可用于模拟和分析系统的行为,以及系统的性能如何受到不确定性因素的影响。
李雅普诺夫方法有许多优点,其中最重要的是它可以用来判断系统的稳定性和收敛性,并评估系统性能的变化情况。
此外,它还可以用来分析系统中存在的非线性关系,以及系统在非线性环境下的行为。
它也可以帮助人们更好地理解系统的行为,从而改善系统的性能。
总之,李雅普诺夫方法是一种用于分析系统的动力学性质的有效方法,它可以用来估计系统的稳定性和收敛性,并且可以分析系统的行为,从而改善系统的性能。
麻省理工学院电气工程与计算机科学系6.241:动态系统-2003年秋复习 6李亚普诺夫方法在这一小节中我们将回顾稳定性的概念,并使用李亚普诺夫直接法、间接法对系统平衡点附近的稳定性进行分析。
接下来我们将提供一系列的例子。
稳定性的定义考虑一个自由(时不变)非线性系统,该系统可以描述为()(())x t f x t •=。
这个系统的一个平衡点就是方程的一个根。
因为任意一个平衡点()0f x −=x −不在原点的系统都可以很方便的转化为一个平衡点在原点的相似系统(例如,令z x x −=−),所以在定义中,我们假定所讨论的系统的平衡点在原点。
如果对于任意给定的0ε>,都存在0δ>,使得若0()x t δ<,()x t ε<对于一切都成立,那么称系统在原点附近的平衡点是李亚普诺夫意义下稳定的(i.s.L )。
如果系统在原点附近的平衡点附近是稳定的,并且存在0t t >0α>,使得若0()x t α<,则当时,那么称系统是李亚普诺夫条件下渐近稳定的。
如果t →∞()0x t →lim ()0t x t →∞=在任意初始条件,即0()x t 在状态空间的任意位置都成立,那么系统是全局渐近稳定的。
李亚普诺夫直接法总体说来,证明一个形如()(())x t f x t •=的非线性系统在原点附近的全局渐近稳定性是一个非常困难的工作,其难度相当于在任一初始条件0()x t 下求解()x t 的封闭解的表达式。
对于线性时不变系统(()()()x t Ax t Bu t •=+),我们得到封闭解表达式,即: 00()()()0()()tA t t A t Bu d t x t e x t e τττ−−=+∫ (1)对于任意矩阵A (不论是否可以对角化),当且仅当A 的特征向量全部位于左半开复平面1,线性系统x Ax •=在原点附近是渐近稳定的。
这是由()x t 表达式中的衰减指数项决定的。
李雅普诺夫方程求解李雅普诺夫方程是一个非线性偏微分方程,具体形式如下:ut + uux + αuxx = 0其中,u(x,t)为未知函数,α为常数。
它的物理意义是描述一维非粘性流体中的波动行为。
该方程的解析解一般较难求解,但是可以通过一些数值方法进行近似求解。
求解李雅普诺夫方程的一种经典方法是使用有限差分法。
该方法将连续的一维空间离散化成N个点,同时将时间轴也进行离散化,得到一个网格结构。
在这个网格上,我们可以用差分方程来逼近方程的求解。
具体来说,我们可以使用简单的方法,比如向前欧拉方法(即前向差分法)或者向后欧拉方法(即后向差分法),也可以使用更高阶的方法,比如Crank-Nicolson方法。
无论使用什么方法,都需要注意网格的选择。
如果网格太粗,求解结果的精度会降低;如果网格太细,计算时间会增加,同时出现数值不稳定的现象。
通常情况下,我们需要通过试探,确定合适的网格大小。
求解李雅普诺夫方程的另外一种方法是使用数值模拟法。
该方法可以对方程进行更加精细的求解,同时可以考虑更加复杂和现实的情形。
数值模拟法的基本思想是将流体划分成一个个微小的体积元,同时考虑它们之间的相互作用和力的作用。
在这个基础上,我们可以模拟出流体在某一时刻的状态,并利用时间迭代,得到流体在未来各个时刻的状态。
数值模拟法的缺点是计算速度较慢,同时也难以处理特定的边界条件。
但是,它适用于各种不同的物理问题,并且也可以处理更加复杂的流体现象。
总的来说,李雅普诺夫方程是一个非常重要的理论问题。
虽然它的解析解较为复杂,但是通过数值方法和物理模拟,我们可以有效地求解它,同时深入研究一维非粘性流体的波动行为。
第二讲 §5.2 李雅普诺夫(Liapunov )第二方法(5课时)一、教学目的:了解Liapunov 在处理稳定性中的两种方法;了解Liapunov 函数的特征与构造;理解Liapunov 第二方法并学会运用它来判定自治系统的稳定性。
二、教学要求:了解Liapunov 函数的特征与构造;理解Liapunov第二方法并学会运用它来判定自治系统解的稳定性。
三、教学重点:运用Liapunov 第二方法判定自治系统解的稳定性。
四、教学难点:如何构造Liapunov 函数。
五、教学方法:讲练结合教学法、提问式与启发式相结合教学法。
六、教学手段:传统板书与多媒体课件辅助教学相结合。
七、教学过程: 1.相关概念上一节我们介绍了稳定性概念,但是据此来判明系统解的稳定性,其可解范围是极其有限的.Liapunov 创立了处理稳定性问题的两种方法:第一方法要利用微分方程的级数解,在他之后没有得到大的发展;第二方法是在不求方程解的情况下,借助一个所谓的Liapunov 函数V(x)和通过微分方程所计算出来的导数()dV X dt的符号性质,就能直接推断出解的稳定性,因此又称为直接法。
本节主要介绍Liapunov 第二方法。
为了便于理解,我们只考虑自治系统(),dxF x dt= n x R ∈ (5.11) 假设1()((),,())T n F x F x F x =在{}n G x R x K =∈≤上连续,满足局部李普希兹条件,且F(0)=0.为介绍Liapunov 基本定理,先引入Liapunov 函数概念. 定义5.3 若函数 ():V x G R →满足V(0)=0, ()V x 和(1,2,,)iVi n x ∂=∂都连续,且若存在0H K <≤,使在{}D x x H =≤上()0(0)V x ≥≤,则称()V x 是常正(负)的;若在D 上除x=0外总有()0(0)V x ><,则称()V x 是正(负)定的;既不是常正又不是常负的函数称为变号的. 通常我们称函数()V x 为Liapunov 函数.易知:函数2212V x x =+在12(,)x x 平面上为正定的;函数 2212()V x x =-+在12(,)x x 平面上为负定的;函数 2212()V x x =-在12(,)x x 平面上为变号函数; 函数 21V x =在12(,)x x 平面上是常正函数. 李雅普诺夫函数有明显的几何意义.首先看正定函数12(,)V V x x =.在三维空间12(,,)x x V 中, 12(,)V V x x =是一个位于坐标面12x ox ,即V=0上方的曲面.它与坐标面12x ox 只在一个点,即原点O(0,0,0)接触(图5-1(a)). 如果用水平平面V=C(正常数)与12(,)V V x x =相交,并将截口垂直投影到12x ox 平面上,就得到一组一个套一个的闭曲线族12(,)V x x C = (图5-1(b)),由于12(,)V V x x =连续可微,且V(0,0)=0,故在120x x ==的充分小的邻域中,12(,)V x x 可以任意小.即在这些邻域中存在C 值可任意小的闭曲线V=C.(b)对于负定函数12(,)V V x x =可作类似的几何解释,只是曲面12(,)V V x x =将在坐标面12x ox 的下方.对于变号函数12(,)V V x x =,自然应对应于这样的曲面,在原点O 的任意邻域,它既有在12x ox 平面上方的点,又有在其下方的点.定理5.1 对系统(5.11),若在区域D 上存在李雅普诺夫函数V(x)满足(1) 正定;(2)(5.11)1()ni i idV VF x dtx =∂=∂∑常负. 则(5.11)的零解是稳定的.图 5-2证明 对任意ε>0(ε<H),记 {}x x εΓ==则由V(x)正定、连续和Γ是有界闭集知 min ()0x b V x ∈Γ=> 由V(0)=0和V(x)连续知存在δ>0(δ<ε),使当x δ≤,V(x)<b,于是有x δ≤ 时00(,,),x t t x ε< 0t t ≥ (5.12)若上述不等式不成立,由x δε≤<和00(,,)x t t x 的连续性知存在10t t >,当[)01,t t t ∈时,00(,,),x t t x ε<而100(,,)x t t x ε=. 那么由b 的定义,有100((,,))V x t t x b ≥ (5.13) 另一方面,由条件(2)知00((,,))0dV x t t x dt ≤在[]01,t t 上成立,即[]01,t t t ∈时000((,,))()V x t t x V x b ≤<自然有100((,,))V x t t x b <. 与(5.13)予盾.即(5.12)成立. 考虑无阻尼线性振动方程20x x ω+= (5.14) 的平衡位置的稳定性.解 把(5.14)化为等价系统 2x y y xω⎧=⎪⎨=-⎪⎩ (5.15)(5.14)的平衡位置即(5.15)的零解.作V 函数22211(,)2V x y x y ω⎛⎫=+ ⎪⎝⎭有(5.15)(5.15)21dV xx yy dtω⎛⎫=+ ⎪⎝⎭即V(x,y)正定,(5.15)0dVdt≤.于是由定理5.1知(5.15)的零解是稳定的,即(5.14)的平衡位置是稳定的.引理 若V(x)是正定(或负定)的李雅诺夫函数,且对连续有界函数 x(t)有lim (())0t V x t →∞=则lim ()0t x t →∞=证明由读者自己完成.定理5.2 对系统(5.11),若在区域D 上存在李雅普诺夫函数V(x)满足 (1) 正定,(2)(5.11)1()ni i idV VF x dtx =∂=∂∑负定, 则(5.11)的零解渐近稳定.证明 由定理5.1知(5.11)的零解是稳定的. 取δ为定理5.1的证明过程中的δ,于是当0x δ≤时,00((,,))V x t t x 单调下降. 若00x =,则由唯一性知00(,,)0x t t x ≡,自然有 00lim (,,)0t x t t x →∞=不妨设00x ≠. 由初值问题解的唯一性,对任意t, 00(,,)0x t t x ≠. 从而由V(x)的正定性知00((,,))0V x t t x >总成立,那么存在a ≥0使00lim ((,,))t V x t t x a →+∞=假设0a >,联系到00((,,))V x t t x 的单调性有 000((,,))()a V x t t x V x <<对0t t >成立. 从而由(0)0V =知存在0h >使0t t ≥时00(,,)h x t t x ε<< (5.16) 成立. 由条件(2)有max0h x dVM dtε≤≤=<故从(5.16)知00((,,))dV x t t x M dt≤对上述不等式两端从t0到t>t0积分得 0000((,,))()()V x t t x V x M t t -≤-. 该不等式意味着00lim ((,,))t V x t t x →+∞=-∞矛盾.故0a =,即00lim ((,,))0t V x t t x →+∞=由于零解是稳定的,所以00(,,)x t t x 在0[,]t +∞上有界,再由引理知00lim (,,)0t x t t x →+∞=.定理证毕.例2 证明方程组 2222(1)(1)x y x x y y x y x y ⎧=-++-⎨=++-⎩ (5.17)的零解渐近稳定.证明 作李雅普诺夫函数 221(,)()2V x y x y =+ 有2222(5.17)(5.17)()()(1)dV xx yy x y x y dt=+=++-在区域{}22(,)1D x y x y =+<上(,)V x y 正定,(5.17)dV dt负定,故由定理5.2知其零解渐近稳定. 最后,我们给出不稳定性定理而略去证明.定理5.3 对系统(5.11)若在区域D 上存在李雅普诺夫函数V(x)满足(1)(5.11)1()ni i idVVF x dtx =∂=∂∑正定,(2)V(x)不是常负函数,则系统(5.11)的零解是不稳定的. 本讲要点: 1.李雅普诺夫意义下方程零解稳定性和渐近稳定性定义。
关于李雅普诺夫函数的几点注记李雅普诺夫函数是一种常见且有用的数学函数,它可以用于解决各种数学问题。
本文将对李雅普诺夫函数的定义、性质、性质、应用及解决问题的步骤进行介绍。
首先,什么是李雅普诺夫函数?李雅普诺夫函数(也称为拉普拉斯函数)是一个常用的数学函数,它可以用来描述特定的函数的一阶和二阶导数之间的关系。
函数的一阶导数是其参数的导数,而二阶导数是一阶导数的导数,这里记录的是函数f(x)的一阶和二阶导数之间的关系式。
它通常被表示为:Delta^2 f(x)=a_0f(x)+a_1f(x)+a_2f(x)其中,a_0,a_1和a_2是常数,可以通过函数f(x)的特定属性来求出。
此外,拉普拉斯函数还有另外一种常用的表示形式:Delta f(x)-lambda f(x)=0这里,lambda是一个常数,可以通过函数f(x)的特定特性来计算出来。
李雅普诺夫函数的定义和性质主要有下列几点:(1)函数f(x)在任意一点x上,拉普拉斯函数的值等于该点的一阶和二阶导数的乘积的系数之和;(2)拉普拉斯函数的值是函数f(x)的一阶和二阶导数的函数,可以通过测量其一阶和二阶导数的值来求出函数f(x)在任意一点处的值;(3)拉普拉斯函数具有线性结构,可以求出函数f(x)的一阶和二阶导数的积等于函数f(x)的常数的性质;(4)拉普拉斯函数是一种线性不变函数,它可以将函数两端的一阶和二阶导数之差表示为函数f(x)的常数和x的一次多项式;(5)拉普拉斯函数还具有可积性,可以把函数f(x)的变化视为线性函数,从而计算出函数f(x)在某一区间上的积分;(6)拉普拉斯函数可以用来求解常微分方程,比如dAlembert 方程、拉氏方程等。
李雅普诺夫函数在工程和实际应用中具有广泛的应用前景,其应用可以分为三类:(1)设计和计算问题:拉普拉斯函数可以用来求解有关方程的问题,这在计算机和数学领域都有广泛应用。
例如,在机器学习和数据挖掘中,拉普拉斯函数可以用来求解概率分布、拟合回归模型、构建网络模型等问题;(2)优化问题:拉普拉斯函数可以帮助优化算法,比如函数最小化、约束优化等;(3)解析计算:拉普拉斯函数可以用来求解各种类型的常微分方程,这在一些解析研究中非常有用。
李雅普诺夫指数谱的研究与仿真李雅普诺夫指数谱是描述动态系统混沌特性的一种重要工具。
在非线性科学、系统工程、生物医学工程等领域,李雅普诺夫指数谱的应用逐渐受到重视。
通过对李雅普诺夫指数谱的研究,我们可以对动态系统的混沌行为进行定量描述和分类,进而为系统的分析和控制提供理论依据。
本文旨在研究李雅普诺夫指数谱的计算方法,并对其在仿真模型中的应用进行验证和分析。
李雅普诺夫指数谱最早由俄罗斯数学家李雅普诺夫提出,用于量化动态系统的不稳定性。
在近几十年的研究中,许多学者对李雅普诺夫指数谱的计算方法和应用进行了深入研究。
目前,常用的计算李雅普诺夫指数谱的方法包括数值方法和解析方法。
数值方法通过数值仿真获取系统动态演化过程,然后根据相关算法计算李雅普诺夫指数谱;解析方法则基于动态系统的数学模型进行理论计算。
然而,对于复杂非线性系统,解析方法的计算难度较大,因此数值方法在实际应用中更受欢迎。
本文采用数值方法计算李雅普诺夫指数谱,具体步骤如下:建立动态系统的仿真模型,包括连续或离散时间模型;通过参数设置,确定仿真模型的初始条件和系统参数;利用数值仿真软件,对仿真模型进行长时间运行,以获取系统的动态演化过程;根据李雅普诺夫指数谱的计算公式,对仿真数据进行计算;通过改变系统参数和初始条件,重复上述步骤,以获得不同情况下李雅普诺夫指数谱的变化情况。
本文通过对一个典型的混沌系统——洛伦兹吸引子的仿真研究,计算了其李雅普诺夫指数谱。
实验结果表明,通过改变系统参数和初始条件,洛伦兹吸引子的李雅普诺夫指数谱也会发生相应变化。
我们还研究了不同混沌系统在相同条件下的李雅普诺夫指数谱,发现在相同条件下,不同系统的李雅普诺夫指数谱具有明显差异。
这些结果说明,李雅普诺夫指数谱可以对动态系统的混沌特性进行定量描述和区分。
本文通过对李雅普诺夫指数谱的研究与仿真,得到了如下李雅普诺夫指数谱可以有效地描述动态系统的混沌特性,反映系统的内在不稳定性;通过计算李雅普诺夫指数谱,可以对不同系统的混沌行为进行定量比较和分类;李雅普诺夫指数谱的计算方法在数值仿真中具有较高的实用性和可操作性。
【总结】Lyapunov指数的计算方法非线性理论近期为了把计算LE的一些问题弄清楚,看了有7~9本书!下面以吕金虎《混沌时间序列分析及其应用》、马军海《复杂非线性系统的重构技术》为主线,把目前已有的LE计算方法做一个汇总!1. 关于连续系统Lyapunov指数的计算方法? ? 连续系统LE的计算方法主要有定义方法、Jacobian方法、QR分解方法、奇异值分解方法,或者通过求解系统的微分方程,得到微分方程解的时间序列,然后利用时间序列(即离散系统)的LE求解方法来计算得到。
关于连续系统LE的计算,主要以定义方法、Jacobian方法做主要介绍内容。
(1)定义法定义法求解Lyapunov指数.JPG关于定义法求解的程序,和matlab板块的“连续系统LE求解程序”差不多。
以Rossler系统为例Rossler系统微分方程定义程序function dX = Rossler_ly(t,X)%??Rossler吸引子,用来计算Lyapunov指数%? ?? ???a=0.15,b=0.20,c=10.0%? ?? ???dx/dt = -y-z,%? ?? ???dy/dt = x+ay,%? ?? ???dz/dt = b+z(x-c),a = 0.15;b = 0.20;c = 10.0;x=X(1); y=X(2); z=X(3);% Y的三个列向量为相互正交的单位向量Y = [X(4), X(7), X(10);? ? X(5), X(8), X(11);? ? X(6), X(9), X(12)];% 输出向量的初始化,必不可少dX = zeros(12,1);% Rossler吸引子dX(1) = -y-z;dX(2) = x+a*y;dX(3) = b+z*(x-c);% Rossler吸引子的Jacobi矩阵Jaco = [0 -1 -1;? ?? ??? 1 a?? 0;? ?? ??? z 0??x-c];dX(4:12) = Jaco*Y;求解LE代码:% 计算Rossler吸引子的Lyapunov指数clear;yinit = [1,1,1];orthmatrix = [1 0 0;? ?? ?? ?? ???0 1 0;? ?? ?? ?? ???0 0 1];a = 0.15;b = 0.20;c = 10.0;y = zeros(12,1);% 初始化输入y(1:3) = yinit;y(4:12) = orthmatrix;tstart = 0; % 时间初始值tstep = 1e-3; % 时间步长wholetimes = 1e5; % 总的循环次数steps = 10; % 每次演化的步数iteratetimes = wholetimes/steps; % 演化的次数mod = zeros(3,1);lp = zeros(3,1);% 初始化三个Lyapunov指数Lyapunov1 = zeros(iteratetimes,1); Lyapunov2 = zeros(iteratetimes,1); Lyapunov3 = zeros(iteratetimes,1);for i=1:iteratetimes? ? tspan = tstart:tstep:(tstart + tstep*steps);? ? ? ? [T,Y] = ode45('Rossler_ly', tspan, y);? ? % 取积分得到的最后一个时刻的值? ? y = Y(size(Y,1),:);? ? % 重新定义起始时刻? ? tstart = tstart + tstep*steps;? ? y0 = [y(4) y(7) y(10);? ?? ?? ? y(5) y(8) y(11);? ?? ?? ? y(6) y(9) y(12)];? ? %正交化? ? y0 = ThreeGS(y0);? ? % 取三个向量的模? ? mod(1) = sqrt(y0(:,1)'*y0(:,1));? ? mod(2) = sqrt(y0(:,2)'*y0(:,2));? ? mod(3) = sqrt(y0(:,3)'*y0(:,3));? ? y0(:,1) = y0(:,1)/mod(1);? ? y0(:,2) = y0(:,2)/mod(2);? ? y0(:,3) = y0(:,3)/mod(3);? ? lp = lp+log(abs(mod));? ? %三个Lyapunov指数? ? Lyapunov1(i) = lp(1)/(tstart);? ? Lyapunov2(i) = lp(2)/(tstart);? ? Lyapunov3(i) = lp(3)/(tstart);? ?? ???y(4:12) = y0';end% 作Lyapunov指数谱图i = 1:iteratetimes;plot(i,Lyapunov1,i,Lyapunov2,i,Lyapunov3) 程序中用到的ThreeGS程序如下:%G-S正交化function A = ThreeGS(V)??% V 为3*3向量v1 = V(:,1);v2 = V(:,2);v3 = V(:,3);a1 = zeros(3,1);a2 = zeros(3,1);a3 = zeros(3,1);a1 = v1;a2 = v2-((a1'*v2)/(a1'*a1))*a1;a3 = v3-((a1'*v3)/(a1'*a1))*a1-((a2'*v3)/(a2'*a2))*a2;A = [a1,a2,a3];计算得到的Rossler系统的LE为————??0.063231??0.092635??-9.8924Wolf文章中计算得到的Rossler系统的LE为————0.09? ?0? ?-9.77需要注意的是——定义法求解的精度有限,对有些系统的计算往往出现计果和理论值有偏差的现象。
李雅普诺夫指数范数摘要:1.李雅普诺夫指数的定义和意义2.李雅普诺夫指数在非线性系统中的应用3.李雅普诺夫指数在混沌运动检测中的应用4.李雅普诺夫指数在非线性电路分析中的应用5.总结与展望正文:李雅普诺夫指数是一种用于描述系统动力学特性的重要指标,它起源于19世纪末的俄罗斯数学家李雅普诺夫的研究。
李雅普诺夫指数在非线性系统、混沌运动检测和非线性电路分析等领域具有广泛的应用。
首先,我们来了解李雅普诺夫指数的定义。
在微分方程中,李雅普诺夫指数用于衡量系统状态变量随时间演变的速度。
具体来说,李雅普诺夫指数反映了系统状态变量之间的收敛速度和分离速度。
如果李雅普诺夫指数大于0,那么系统状态变量将以指数速度converge 或diverge。
在非线性系统中,李雅普诺夫指数具有重要的意义。
它可以用来判断系统是否具有稳定性和可控性。
对于非线性系统,如果李雅普诺夫指数为正值,那么系统可能存在混沌运动。
混沌运动是一种高度复杂、不可预测的运动形式,它在气象、生态、生物等领域有广泛的应用。
因此,通过检测李雅普诺夫指数的正负,我们可以了解非线性系统是否存在混沌现象。
李雅普诺夫指数在非线性电路分析中也发挥着重要作用。
非线性电路是指至少含有一个非线性元件的电路。
非线性元件的特性使得电路的输出与输入之间不存在线性关系。
在这种情况下,李雅普诺夫指数可以用来判断电路的稳定性和可控性。
通过分析李雅普诺夫指数,我们可以预测电路中的混沌现象,从而为电路设计和优化提供理论依据。
总之,李雅普诺夫指数作为一种数学工具,在非线性系统、混沌运动检测和非线性电路分析等领域具有广泛的应用。
通过研究李雅普诺夫指数,我们可以更好地理解系统的动态特性,为实际应用提供理论支持。
【总结】Lyapunov指数的计算方法非线性理论近期为了把计算LE的一些问题弄清楚,看了有7~9本书!下面以吕金虎《混沌时间序列分析及其应用》、马军海《复杂非线性系统的重构技术》为主线,把目前已有的LE计算方法做一个汇总!1. 关于连续系统Lyapunov指数的计算方法连续系统LE的计算方法主要有定义方法、Jacobian方法、QR分解方法、奇异值分解方法,或者通过求解系统的微分方程,得到微分方程解的时间序列,然后利用时间序列(即离散系统)的LE 求解方法来计算得到。
关于连续系统LE的计算,主要以定义方法、Jacobian方法做主要介绍内容。
(1)定义法定义法求解Lyapunov指数.JPG关于定义法求解的程序,和matlab板块的“连续系统LE求解程序”差不多。
以Rossler系统为例Rossler系统微分方程定义程序function dX = Rossler_ly(t,X)% Rossler吸引子,用来计算Lyapunov指数% a=,b=,c=% dx/dt = -y-z,% dy/dt = x+ay,% dz/dt = b+z(x-c),a = ;b = ;c = ;x=X(1); y=X(2); z=X(3);% Y的三个列向量为相互正交的单位向量Y = [X(4), X(7), X(10);X(5), X(8), X(11);X(6), X(9), X(12)];% 输出向量的初始化,必不可少dX = zeros(12,1);% Rossler吸引子dX(1) = -y-z;dX(2) = x+a*y;dX(3) = b+z*(x-c);% Rossler吸引子的Jacobi矩阵Jaco = [0 -1 -1;1 a 0;z 0 x-c];dX(4:12) = Jaco*Y;求解LE代码:% 计算Rossler吸引子的Lyapunov指数clear;yinit = [1,1,1];orthmatrix = [1 0 0;0 1 0;0 0 1];a = ;b = ;c = ;y = zeros(12,1);% 初始化输入y(1:3) = yinit;y(4:12) = orthmatrix;tstart = 0; % 时间初始值tstep = 1e-3; % 时间步长wholetimes = 1e5; % 总的循环次数steps = 10; % 每次演化的步数iteratetimes = wholetimes/steps; % 演化的次数mod = zeros(3,1);lp = zeros(3,1);% 初始化三个Lyapunov指数Lyapunov1 = zeros(iteratetimes,1);Lyapunov2 = zeros(iteratetimes,1);Lyapunov3 = zeros(iteratetimes,1);for i=1:iteratetimestspan = tstart:tstep:(tstart + tstep*steps);[T,Y] = ode45('Rossler_ly', tspan, y);% 取积分得到的最后一个时刻的值y = Y(size(Y,1),:);% 重新定义起始时刻tstart = tstart + tstep*steps;y0 = [y(4) y(7) y(10);y(5) y(8) y(11);y(6) y(9) y(12)];%正交化y0 = ThreeGS(y0);% 取三个向量的模mod(1) = sqrt(y0(:,1)'*y0(:,1));mod(2) = sqrt(y0(:,2)'*y0(:,2));mod(3) = sqrt(y0(:,3)'*y0(:,3));y0(:,1) = y0(:,1)/mod(1);y0(:,2) = y0(:,2)/mod(2);y0(:,3) = y0(:,3)/mod(3);lp = lp+log(abs(mod));%三个Lyapunov指数Lyapunov1(i) = lp(1)/(tstart);Lyapunov2(i) = lp(2)/(tstart);Lyapunov3(i) = lp(3)/(tstart);y(4:12) = y0';end% 作Lyapunov指数谱图i = 1:iteratetimes;plot(i,Lyapunov1,i,Lyapunov2,i,Lyapunov3)程序中用到的ThreeGS程序如下:%G-S正交化function A = ThreeGS(V) % V 为3*3向量v1 = V(:,1);v2 = V(:,2);v3 = V(:,3);a1 = zeros(3,1);a2 = zeros(3,1);a3 = zeros(3,1);a1 = v1;a2 = v2-((a1'*v2)/(a1'*a1))*a1;a3 = v3-((a1'*v3)/(a1'*a1))*a1-((a2'*v3)/(a2'*a2))*a2;A = [a1,a2,a3];计算得到的Rossler系统的LE为————Wolf文章中计算得到的Rossler系统的LE为————0需要注意的是——定义法求解的精度有限,对有些系统的计算往往出现计果和理论值有偏差的现象。
李雅普诺夫指数与奇怪吸引子
1. 李雅普诺夫指数
2. 菲根鲍姆常数
吸引子
3. 奇怪
奇怪吸引子
利用李雅普诺夫指数λ ,相空间内初始时刻的两点距离将随时间(迭代次数)作指数分离:
在一维映射中λ 只有一个值,而在多维相空间情况下一般就有多个 λi ,而且沿相空间的不同方向,其 λi (i =1,2,…)值一般也不同。
)
exp(00n n λ⋅⋅−≈−n y x y x
面积 。
r <1 时坐标原点是稳定的不动点,当 r >1, 坐标原点为鞍点,两个新平衡点 C 1与 C 2是稳定的焦点。
=24.7368) C 1与 C 2成了不稳定的焦点。
c r r >
奇怪吸引子的最重要特征是对初值的敏感性,初始相互靠近的两条轨线将按指数式规律分离。
但在有限空间中如何保持这样的指数式分离状态? 洛伦兹吸引子有两个不稳定平衡点,因此复杂的相轨线可以随机地在两个中心之间行走。
是否只有一个平衡点的奇怪吸引子呢?
如果有,在有限相空间里如何容纳按指数分离的相轨线?于是就想象伸展开来的相轨线可能产生了某种折叠。
巴克尔变换描写了这种变换:
⎪⎪⎩
⎪⎪⎨⎧⎪⎪⎩⎪⎪⎨⎧
≤≤+<≤==++1212121021
1n n n n n n n x ay x ay y x x ,,
在平面的投影
c =2.6
c =3.5 c =4.1
c =4.18 c =4.21
c =4.6。