电机、减速器的选型计算实例
- 格式:doc
- 大小:72.50 KB
- 文档页数:3
回转减速电机选型计算公式回转减速电机是工业生产中常用的一种电机类型,它通过减速装置将高速旋转的电机输出轴降低到所需的转速,从而实现对机械设备的动力传递。
在选择回转减速电机时,需要根据具体的工作需求和参数来进行计算和选型,以确保电机能够正常运行并满足工作要求。
本文将介绍回转减速电机选型计算公式,帮助读者了解如何进行正确的选型计算。
1. 转矩计算公式。
在选型回转减速电机时,首先需要计算所需的输出转矩。
转矩是衡量电机输出功率大小的重要参数,它直接影响到电机的工作性能和适用范围。
转矩的计算公式如下:T = P / (2πN)。
其中,T为输出转矩,单位为牛顿·米(N·m);P为输出功率,单位为瓦特(W);N为输出转速,单位为转每分钟(rpm)。
通过这个公式,可以根据所需的输出功率和转速来计算出所需的输出转矩。
2. 速比计算公式。
回转减速电机通过减速装置将电机的高速旋转转换为所需的低速输出,因此需要计算减速比来确定减速装置的参数。
速比是指输入轴和输出轴的转速比值,它可以通过以下公式来计算:i = N1 / N2。
其中,i为速比;N1为输入轴转速,单位为rpm;N2为输出轴转速,单位为rpm。
通过计算速比,可以确定减速装置的传动比例,从而选择合适的减速装置类型和参数。
3. 功率计算公式。
在选型回转减速电机时,还需要计算所需的输入功率。
输入功率是指电机需要输入的功率大小,它可以通过以下公式来计算:P = Tω。
其中,P为输入功率,单位为瓦特(W);T为输出转矩,单位为牛顿·米(N·m);ω为输出轴角速度,单位为弧度每秒(rad/s)。
通过计算输入功率,可以确定所需的电机功率大小,从而选择合适的电机型号和参数。
4. 效率计算公式。
在实际工作中,回转减速电机的效率也是一个重要的考量因素。
效率是指电机输出功率与输入功率之比,它可以通过以下公式来计算:η = Pout / Pin。
电机选型案例本篇文章介绍了两个电机选型案例,第一个是皮带输送线电机选型,第二个是直线导轨电机选型。
第一个案例中,设计要求是传送20Kg物料X 2,传送速度1m/s,加速时间0.15s,已知条件为摩擦系数=0.2,机械效率=90%,滚子直径=200mm。
首先计算负载,然后计算皮带拉力和辊筒转矩,最后计算功率和电机转矩,得出选用1.9N·m的电机,并进行校验。
第二个案例中,设计要求是传送50Kg的负载,运行速度1m/s,加速时间0.25s,已知条件为直线导轨摩擦系数0.1,带轮直径100mm。
首先计算负载,然后计算同步轮转矩和电机功率,得出两种方案,一种是选择18NM的步进电机,另一种是加减速器,取i=2.5.在改写方面,可以将一些公式和计算过程进行简化,让文章更易读懂。
同时,可以将每个案例的设计要求和已知条件进行分段,以便读者更好地理解。
根据题目要求,我们需要设计一个托盘加速到一定速度的系统,以下是设计过程:1.确定托盘的惯量托盘的惯量可以通过托盘质量和直径来计算,即 $J_{托盘}=\frac{1}{2}M(\frac{D}{2})^2$。
代入数据得到 $J_{托盘}=kg·mm^2$。
2.确定加速度根据题目要求,托盘需要在 0.5 秒内加速到 0.5 m/s 的速度,因此加速度为 $a=\frac{V}{t}=1m/s^2$。
3.确定所需扭矩根据丝杠的导程和直径,可以计算出每秒钟丝杠转动的圈数为 $n=\frac{v}{P}=\frac{0.5}{0.01}=50$,因此所需扭矩为$T_{总}=J_{托盘}·\frac{a}{n}=·\frac{1}{50}=1764N·mm$。
4.确定电机输出扭矩和功率根据传动比和所需扭矩,可以计算出电机输出扭矩为$T_{电机}=T_{总}/i=1764/5=352.8N·mm$。
根据机械效率为0.9,可以计算出电机输出功率为 $P_{电机}=T_{电机}·\omega_{电机}/0.9=352.8·2π·40/60/0.9=148.7W$。
一、概述在机械设计中,电机和减速机的选型是非常重要的环节。
电机作为驱动力的来源,而减速机则能够提供合适的速度和扭矩输出,两者的选型直接影响到机械设备的性能和效率。
对于工程师而言,正确的选型是必不可少的。
本文将从电机和减速机的选型原则、计算方法以及实际应用等方面进行探讨。
二、电机的选型1. 负载特性在选型电机时,首先需要对负载特性进行充分的了解。
负载特性包括负载类型、负载惯性、负载的起动和工作过程中的变化等。
根据负载的特性来选择合适的电机类型,如直流电机、异步电机或者同步电机。
2. 额定功率和转速根据设备的实际工作需求,选择合适的额定功率和转速。
一般来说,额定功率要略大于负载的需求,以保证电机的稳定工作。
转速的选择要满足设备的运行速度要求。
3. 工作制度工作制度是指电机在工作中的连续工作时间和启动次数等。
根据不同的工作制度来选择适合的电机,以确保电机在长时间工作中不会过载或损坏。
4. 环境条件环境条件包括温度、湿度、海拔高度等因素。
这些因素会影响电机的散热和绝缘性能。
在特殊环境下,需要选择防爆、防水或者耐高温的电机。
5. 综合考虑在进行电机选型时,需要综合考虑以上因素,并结合实际情况做出合理的选择。
还需要考虑电机的可靠性、维护便捷性以及成本等因素。
三、减速机的选型1. 驱动装置根据需要驱动的设备来选择适合的减速机,一般可选择齿轮减速机、蜗轮减速机或行星减速机等。
2. 输入输出参数减速比是决定减速机输出转速和扭矩的重要参数。
在选型时需要根据设备的工作要求来确定减速比,以保证输出参数满足要求。
3. 工作制度和环境条件与电机选型相似,减速机的工作制度和环境条件也需要充分考虑。
特别是一些高温、潮湿、粉尘大的环境下,需要选择耐受恶劣条件的减速机。
4. 安装方式和结构减速机的安装方式和结构也会影响选型。
根据设备的安装空间和特殊要求来选择合适的减速机结构和安装方式。
5. 综合考虑综合考虑以上因素,选择合适的减速机类型和规格,以确保设备在工作中能够稳定高效地运行。
步进电机选型的计算示例一、必要脉冲数和驱动脉冲数速度计算的示例下面给出的是一个3相步进电机必要脉冲数和驱动脉冲速度的计算示例。
这是一个实际应用例子,可以更好的理解电机选型的计算方法。
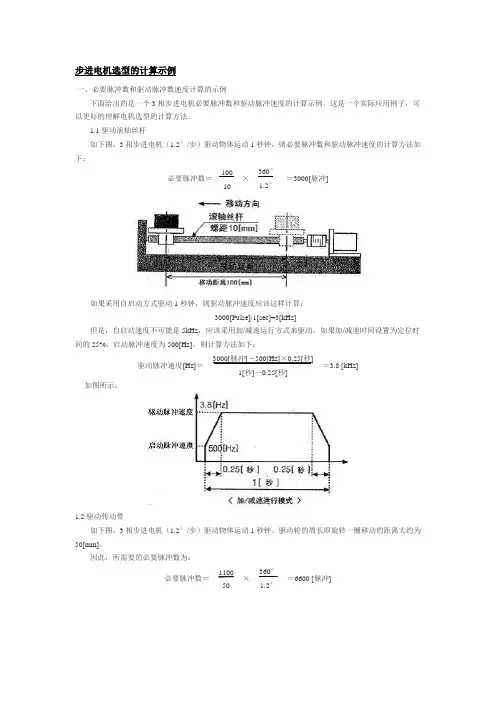
1.1 驱动滚轴丝杆如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟,则必要脉冲数和驱动脉冲速度的计算方法如下:必要脉冲数=10010×360°1.2°=3000[脉冲]如果采用自启动方式驱动1秒钟,则驱动脉冲速度应该这样计算:3000[Pulse]/1[sec]=3[kHz]但是,自启动速度不可能是5kHz,应该采用加/减速运行方式来驱动。
如果加/减速时间设置为定位时间的25%,启动脉冲速度为500[Hz],则计算方法如下:驱动脉冲速度[Hz]=3000[脉冲]-500[Hz]×0.25[秒]1[秒]-0.25[秒]=3.8 [kHz]如图所示:1.2驱动传动带如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟。
驱动轮的周长即旋转一圈移动的距离大约为50[mm]。
因此,所需要的必要脉冲数为:必要脉冲数=110050×360°1.2°=6600 [脉冲]所需参数同上例驱动滚轴丝杆,采用加/减速运行模式,则驱动脉冲速度为:驱动脉冲速度[Hz]=6600[脉冲]-500[Hz]×0.25[秒]1[秒]-0.25[秒]=8.7 [kHz]如图所示:二、负载力矩的计算示例(T L)下面给出的是一个3相步进电机负载力矩的计算示例。
这是一个实际应用例子,其中的数字公式有助于更好的理解电机选型的应用。
2.1滚轴丝杆驱动水平负载如下图,滚轴丝杆驱动水平负载,效率为90%,负载重量为40千克,则负载力矩的计算方法如下:T L=m·P B2πη×1i[kgf·cm]T L=40[kg]×1[cm]2π×0.9×11=7.07 [kgf·cm]2.2传送带驱动水平负载传送带驱动水平负载,效率为90%,驱动轮直径16毫米,负载重量是9千克,则负载力矩的计算方法如下:T L=D2×m ×1η×1i[kgf·cm]T L=1.6 [cm]2×9 [kg] ×10.9×11=8 [kgf·cm]2.3滚轴丝杆和减速器驱动水平负载如下图,滚轴丝杆螺距为5毫米,效率为90%,负载重量为250千克,则负载力矩的计算方法如下:T L=m·P B2πη×1i[kgf·cm]T L=250[kg]×0.5[cm]2π×0.9×110=2.21 [kgf·cm]这是水平方向负载的计算结果,如果是垂直方向的负载,则力矩应该是此结果的2倍,而且此结果仅包括负载力矩,电机的总负载还应该包括加/减速力矩,但是,计算中很难得到准确的负载惯性惯量,因此,为了解决这个问题,在实际计算负载力矩的时候,特别是自启动或需要迅速加/减速的情况,我们应该在此基础上再乘以一个安全系数。
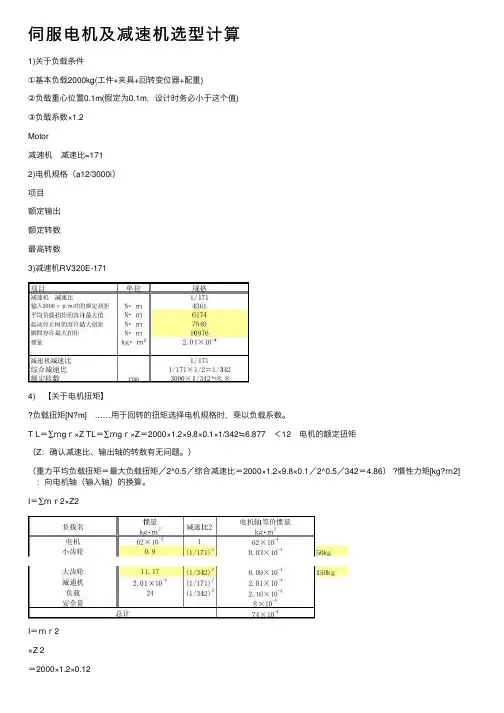
伺服电机及减速机选型计算1)关于负载条件①基本负载2000kg(⼯件+夹具+回转变位器+配重)②负载重⼼位置0.1m(假定为0.1m,设计时务必⼩于这个值)③负载系数×1.2Motor减速机 减速⽐=1712)电机规格(a12/3000i)项⽬额定输出额定转数最⾼转数3)减速机RV320E-1714) 【关于电机扭矩】负载扭矩[N?m] ……⽤于回转的扭矩选择电机规格时,乘以负载系数。
T L=∑mgr×Z TL=∑mgr×Z=2000×1.2×9.8×0.1×1/342≒6.877 <12 电机的额定扭矩(Z:确认减速⽐、输出轴的转数有⽆问题。
)(重⼒平均负载扭矩=最⼤负载扭矩/2^0.5/综合减速⽐=2000×1.2×9.8×0.1/2^0.5/342=4.86) ?慣性⼒矩[kg?m2] :向电机轴(输⼊轴)的换算。
I=∑mr2×Z2I=mr2×Z 2=2000×1.2×0.12×(1/342)2≒0.36×10-4I=m(D 2+d 2)÷8×Z 2=I=∑mr2×Z 2⾓加速度 [rad/s^2] :最⼤加速时的负载 dω/dt=(2π/60) N/⊿tdω/dt=(2π/60) N/⊿t=(2π/60)×3000/0.2≒1570.8(N:电机额定转数rpm、⊿t:加速时间sec) ?加速扭矩[kg ?m^2/s^2=N ?m] ……⽤于加速的扭矩 Ta=I ?dω/dt Ta=I ?dω/dt=74×10-4×1570.8≒11.62瞬时最⼤扭矩[kg ?m^2/s^2=N ?m] Tmax=TL+ Ta <电机的最⼤扭矩Tmax=TL+ Ta=6.877+11.62=18.5 <35 电机的最⼤扭矩 变位器最⾼⾓速度ωpmax=额定转数÷综合减速⽐×360°÷60sec=3000÷342×360÷60 ≒52.63°/sec 加減速时间tA=t1=设计值=0.2sec⾓加速度dωp/dt=ωpmax/tA =263.15°/sec2停⽌时间t4=1.0sec以内。
减速机在选型时如何套用公式计算?10点妙招!在您购买减速机的时候您可能不知道如何计算一些相关参数,那下面就看看一些具体的参数如何计算包括已知数据与未知数参数的情况一、减速机选型计算(手算);(已知参数)1. 原动机电机功率:P1 KW电机转速:n1 / min最大起动扭矩:TA Nm2. 工作机工作机轴功率:P2 KW转速:n2 /min每天运行时间:h/day每小时起动次数每小时工作周期:ED =XXX%3. 电动机电机功率:P1 =75KW电机转速:n1=1500/min最大起动扭矩:TA=720 Nm4.皮带机皮带机轴功率:P2=66KW转速:n2=26/min每天运行时间:12h/日每小时起动次数:7次每小时工作周期: ED=100%二、减速机选型计算;(已知参数)环境温度:℃安装位置:室内小空间;室内大空间;室外;海拔高度:m环境温度:30℃安装位置:室内大空间海拔高度:<1000m三、减速机结构选型设计根据皮带机安装位置和空间大小,决定选择直交轴齿轮箱。
安装方式:卧式安装输出轴位置和型状:位于齿轮箱右侧,部置形式C型,实心轴输出轴旋转方向:面对输出轴端看为逆时针(CCW)四、减速机选型(类型和规格的确定)选择减速机规格和类型确定传动比:n1/n2=1500/26=57.7 in=56确定减速机额定功率:P2N≥P2×f1×f2=66×1.3×1=85.8kw从功率表中选择类型B3SH,减速机规格9 号,对应的额定功率P2N=100KWf1:工作机系数; f2:原动机服务系数检查减速机选型是否合适:(计算满足 3.33 ×P2≥P2N)3.33×P2=3.33×66=219.8KW>P2N(100KW) 满足要求。
五、减速机选型(类型和规格的确定)起动扭矩校核:P2N≥(TA×N1/9550) ×f3P2N≥ (720×1500 /9550) ×0.65= 73.5kwf3起动扭矩系数(查表3)六、确定减速机润滑方式确定减速机润滑油供给方式根据减速机安装方式和旋转速度决定;此减速机可采用浸油飞溅润滑,可查表确定是否采用强制润滑或飞溅润滑。
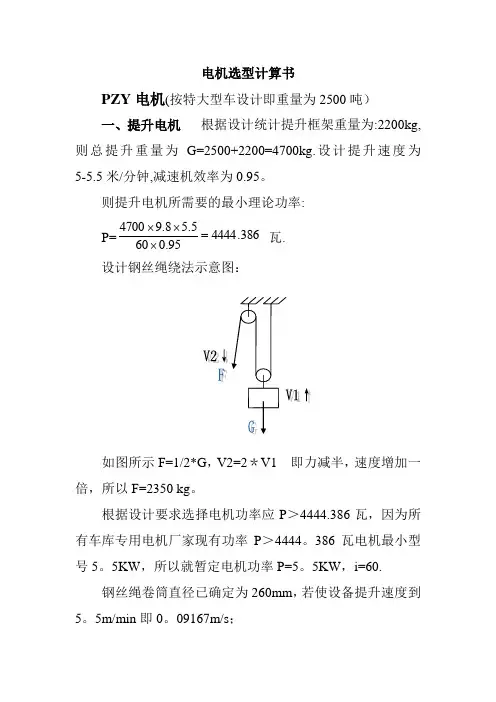
电机选型计算书PZY 电机(按特大型车设计即重量为2500吨)一、提升电机 根据设计统计提升框架重量为:2200kg,则总提升重量为G=2500+2200=4700kg.设计提升速度为5-5.5米/分钟,减速机效率为0.95。
则提升电机所需要的最小理论功率: P=386.444495.0605.58.94700=⨯⨯⨯ 瓦. 设计钢丝绳绕法示意图:如图所示F=1/2*G ,V2=2*V1 即力减半,速度增加一倍,所以F=2350 kg 。
根据设计要求选择电机功率应P >4444.386瓦,因为所有车库专用电机厂家现有功率P >4444。
386瓦电机最小型号5。
5KW ,所以就暂定电机功率P=5。
5KW ,i=60.钢丝绳卷筒直径已确定为260mm ,若使设备提升速度到5。
5m/min 即0。
09167m/s ;由公式:D πων=可求知卷筒转速:r D 474.1326.014.311=⨯==πνω 查电机厂家资料知:电机功率:P=5.5KW 速比: i=60电机输出轴转速为ω=25r ,扭矩为M=199。
21/kg ·m ,输出轴径d=φ60mm 。
则选择主动链轮为16A 双排 z=17,机械传动比为:25474.13i 1'==z z 54.31474.131725z 1=⨯= 取从动轮16A 双排z=33;1).速度校核:所选电机出力轴转速为ω=25r ,机械减速比为33/17,得提升卷筒转速:r 88.123317251=⨯=ω 综上可知:提升钢索自由端线速度:min)/(52.1026.088.1214.3m D =⨯⨯==πων则提升设备速度为:v=10。
52/2=5。
26m/min.2).转矩校核:设备作用到钢索卷筒上的力为:G/2=2350kg 。
则,卷筒所需最小转矩:T=2350*0。
13=305。
5 kg ·m链条传动效率取η=0.96,动载系数取K=1.2,电机出力轴最小转矩为;m kg T ·72.19696.0332.1175.3051=⨯⨯⨯= 可见:1T 〈199。
步进电机选型的计算示例步进电机是一种将电脉冲转化为机械角度的装置,广泛应用于工业自动化领域。
选型步进电机时,需要考虑以下几个方面的因素:1.载荷特性:首先需要确定所需驱动的载荷特性,包括转动惯量、负载扭矩和转速等。
这些参数会决定步进电机的尺寸大小、型号和驱动电流等。
2.加速度和减速度:根据需要的加速度和减速度来选择步进电机。
通常情况下,较大的转动惯量需要更大的电机和更高的驱动电流,以实现较快的加速和减速。
3.驱动方式:根据具体应用的要求来选择驱动方式,主要有全步进驱动和微步进驱动两种。
全步进驱动具有较大的转动角度,而微步进驱动可以实现更精细的位置调整。
4.电磁噪声:步进电机在工作时会产生电磁噪声,需要考虑噪声水平是否符合所需应用的要求。
下面以一个实际应用的计算示例来说明步进电机的选型过程。
假设需要选型的应用为驱动一个转动惯量为0.5 kg·m²的载荷,要求达到最大转速为300 RPM,加速度为5000 RPM/s,减速度为8000RPM/s。
根据这些参数,我们可以按照以下步骤进行步进电机的选型计算:1. 确定负载扭矩:载荷的转动惯量可以根据实际情况或者相关设计手册得到。
假设转动惯量为0.5 kg·m²,可根据公式T=Jα 计算所需的平均扭矩。
其中,T为负载扭矩,J为转动惯量,α为加速度。
根据给定的加速度为5000 RPM/s,可得到平均扭矩T=Jα=0.5kg·m²×5000RPM/s=2500 N·m。
2.确定最大扭矩:最大扭矩一般是平均扭矩的2-3倍,以确保电机在加速和减速时能够提供足够的动力。
假设最大扭矩为平均扭矩的2倍,即最大扭矩为5000N·m。
3.确定转速范围:根据要求的最大转速为300RPM,可以根据实际情况选择合适的步进电机型号。
一般来说,步进电机的最大转速会在数据手册中给出。
4.确定驱动电流:驱动电流的大小与所需的扭矩和转速有关。
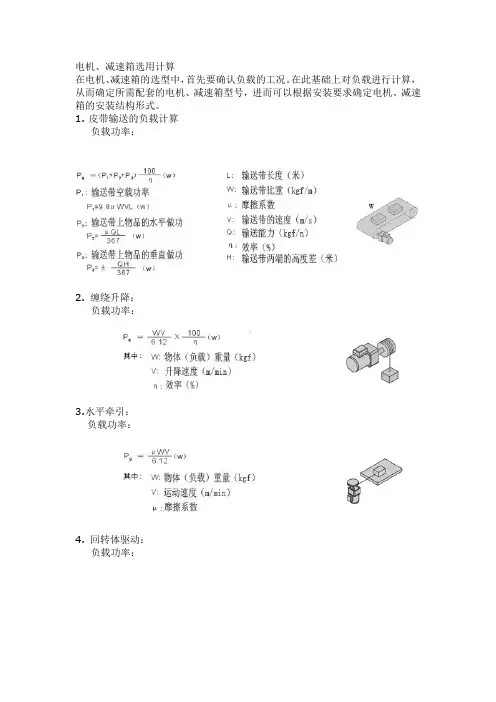
电机、减速箱选用计算在电机、减速箱的选型中,首先要确认负载的工况。
在此基础上对负载进行计算,从而确定所需配套的电机、减速箱型号,进而可以根据安装要求确定电机、减速箱的安装结构形式。
1. 皮带输送的负载计算负载功率:2. 缠绕升降:负载功率:3.水平牵引:负载功率:4. 回转体驱动:负载功率:类型 GD2(回转惯量计算)水平运选型举例:①皮带轮机构AC电机时:此为在输送带驱动机构上使用标准电机时的选定例。
须按下述要求规格来选用电机。
(要求规格及机构规格)皮带与工作物的总重量•••••••m1=20kg滑动面的摩擦系数•••••••••••μ=0.3滚轮的直径••••••••••••D =100mm滚轮的重量•••••••••••••m2=1kg皮带•滚轮的效率••••••••••η = 0.9皮带的速度••••••••V = 140mm/s±10%电机电源•••••••••••单相110V60Hz工作时间•••••••••••1天8小时运转②决定减速箱的减速比:减速比输出轴转速:N G=(V•60)/(π•D)=((140±14)×60)/(π×100)=26.7±2.7[r/min]因电机(4极)在60Hz时的额定转速为1450~1550r/min,所以应选择在此范围内的减速比i=60。
减速箱的减速比i为:i=(1450~1550)/N G=(1450~1550)/(26.7±2.7)=49.3~64.6计算必要转矩:输送带起动时所需的转矩为最大。
先计算起动时的必要转矩。
滑动部的摩擦力F,F=μm·g=0.3×20×9.807=58.8[N]负载转矩T L=F·D/2·η+(58.8×100×10-3)/(2×0.9)=3.27[N·m]此负载转矩为减速箱输出轴的数值,因此需换算成电机输出轴的数值。
在机器人中,执行机构一般分为液压驱动和电机驱动两种类型,其中又以电机驱动最为常见。
本文主要讨论一般机器人驱动机构中电机的选择问题。
机器人中常用的电机分为有刷直流电机、无刷直流电机、永磁同步电机、步进电机等。
其中在中小型机器人(尺寸在15cm-30cm)中,由于价格便宜,定位精度高,直流电机以及无刷直流电机最为常见。
本文主要讨论直流电机的选择方法。
第一部分:电机要求直流电机简介:在市场上,存在着多种多样的直流电机。
据不完全估计,单就国内就有上千家电机生产厂家。
更不要提日本、德国等老牌电机生产强国。
即使对于一个很小的直流电机,它都具有复杂的内部结构和大量的产品资料。
这里,我们仅从机器人的角度出发考虑其对电机性能的要求。
电机的选择往往是我们对于电机性能的要求与我们可以接受价格的折衷。
因而,在电机选择过程中,我们需要整体考虑电机的各个参数,从中筛选出对我们重要的参数,结合我们的需要,选择合适的电机。
对于一个电机来说,其往往具有多条运行特性曲线,这里我们将列出其中最重要的一些特性,然后对这些特性进行一些解释。
对于一个电机,从机器人驱动的角度,我们主要的关心的有:a) 工作电压——对于一个电机来说,可能会存在多个电压参数;其中最为常用的为连续运行条件下的额定电压;一些电机可以在额定电压之上以超过额定转速和转矩的方式运行,但是运行一段时间后可能会出现局部过热问题;也就是说部分过电压仅可以短时运行,而不可以长期运行;b) 转速——电机旋转速度,一般单位为转每分钟,有时也使用弧度每秒或者角度每秒表示;c) 转矩——电机改变旋转速度的能力;如当使用扳手拧动螺丝时,扳手的转矩使得螺丝旋转;在机器人领域,转矩一般用于使得机器人移动或者使得机械臂完成各种动作;转矩等于力与力臂的成绩,其单位为Nm;d)电流——对于一个电机,可能存在多个电流参数,如空载电流、额定电流以及堵转电流等;e)物理参数——如电机尺寸、电机轴尺寸、截面尺寸以及固定孔的位置等;f)其他参数——一些电机还会提供一些其他的部件,如编码器、制动器、齿轮箱、基座等等;直流减速电机:显而易见的,直流电机供电电流为直流,因而,其可以使用电池进行供电;这也是直流电机在机器人中广泛应用的一个原因;小型直流电机可能在尺寸上不同,但是在基本参数上一般是一致的;直流电机的旋转方向可以通过改变供电电压的符号来改变;小型直流电机一般运行在高速低转矩运行范围内,这与机器人中电机驱动要求是矛盾的;机器人领域通常要求电机运行在低速大转矩范围内;因而,为了降低电机转速同时提高电机转速,一般在电机与输出轴之间增加轴系,即减速器;通过组合不同的减速器,电机可以获得不同的额定转速与额定转矩;目前市面上购买的直流电机很多出厂时已经带有减速器,因而常成为直流减速电机;减速电机的优势在于:使用简单、输出转矩高、转速低、可供选择范围大。
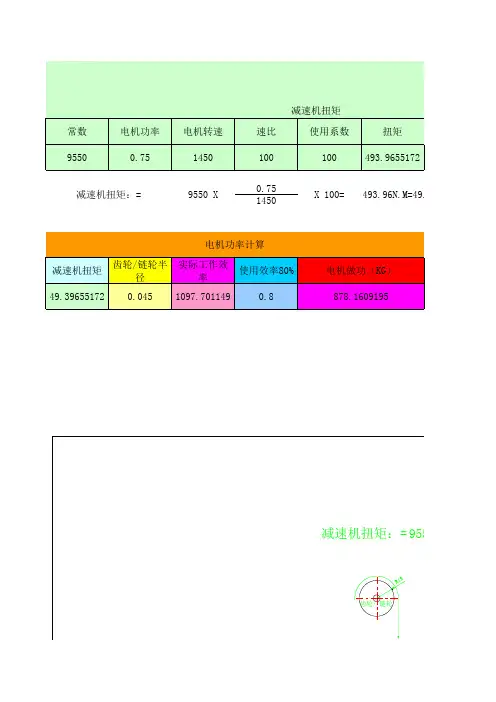
小白进阶篇—电机选型案例集主讲:小丸子教育—泽雨老师目的:掌握不同电机在不同工况下的选型问题 课程内容:1,皮带输送线电机选型设计要求: 20Kg 物料X 2 传送速度1m/s 加速时间0.15s已知条件: 摩擦系数=0.2 机械效率=90% 滚子直径=200mm1. 计算功率s rad mm s mm mm s m D V T P MN R F T NF F NN N ssm Kg s m K a m f F /102002/10002002/14.282843112131338015.0/120/102.0g 402=••=••=•=•=•=⨯==⨯+==+=⨯+⨯⨯=•+=πππππ)(辊筒辊筒辊筒负载负载辊筒皮带拉力负载负载皮带拉力负载ωωWWW P K P KW r T P MN M N T mm smm r n n i i T T W s rad M N T P 3823829.02862.1286.09550min/14409.1154.2815200/1000min/1440284/104.28==⨯=•==•=•=•==•====⨯•=•=ηω电机实际电机电机电机负载电机传动比负载电机辊筒负载负载校验:π设计要求; M=50Kg运行速度1m/s 加速时间0.25s直线导轨摩擦系数0.1 带轮直径100mm[]Ns m Kg ssm Kg s m Kg am g m F 250/)25.015010501.0(25.0/150/10501.022=•⨯+⨯⨯=⨯+⨯⨯=•+••=μ负载srad s rad mm smm s r mmsmm D V T P m N m N mm N R F T /20/2100/1000/100/10005.1205.025050250=••=•=•=•=•=⨯=⨯=•=ππππ同步轮负载负载负载负载负载同步轮负载负载ωω方案一:选择18NM 的步进电机Ws r M N P W mmsmm M N P T P 4.11302min/60min/600183602100/100018=⨯⨯•==⨯•⨯•==•=πππ无减速器最大转速电机负载电机电机电机电机ωωω方案二:加减速器MN i T T NM i s s r r i •=•===⨯=2085.214.3min /60/220min/600电机输出的步进电机力矩为考虑到频矩特性,取静为调试留出余量,取π已知条件:丝杠质量m=2Kg 负载+滑台质量M=20Kg 进给速度V=0.2m/s 丝杠导程5mm丝杠公称16mm加速时间0.2s直线导轨摩擦系数0.1传动机械效率0.9步骤:1.确定丝杠惯量222g 64m 2181mm K R D m J •=•=•=丝杠2. 负载直线运动质量等价转动惯量22)π(导程负载P M J •=上式二级公式推导过程ππ2221212222Pw v R PR w v w v m J w J v m =•=••=•=•2213)25(20mm kg kg J •=••=π负载22000077.076mkg mm kg J J J •=•=+=负载丝杠总3.确定惯性矩)π(加速时间导程总惯性矩t P v J T •••=2公式推导:加速时间角加速度角速度加速时间角速度角加速度角加速度总惯性矩ππt P v Pvw t w J T ••=•==•=22βββmN sm s m m kg T •=••••=096.0)2.0005.02/2.0(000076.02π惯性矩单位换算;[][]mN m N m s m Kg s m Kg s m m m Kg T •=•=••=⎥⎦⎤⎢⎣⎡•=⎥⎦⎤⎢⎣⎡••••••=096.0096.0/096.0096.02.0005.022.0000077.022222π惯性矩4. 直线摩擦里等价旋转扭矩π导程摩擦力2P mg T ••=μ公式推导;πππ导程摩擦力导程摩擦力导程摩擦力222P mg T RP mg R T R P mg R T •==•=μμμ[][][]mN mm N mm N mm N mmKg s m s mm m Kg mm s m Kg P mg T •=•=•=•***=••***=⎥⎦⎤⎢⎣⎡••***=***=•=016.09.159.152510201.0/2510201.02510201.025/10201.02222πππππ导程摩擦力μ5.计算功率、 、Ws rad m N P s rad s rad s r s r r mm P v w m N m N m N T T T wT P 9.309.0/251111.0/2.251/240/402/40/5200mm/s 112.0016.0096.0=*•==•=*===•=•+•=+=•=ππ导程惯性矩摩擦力总总η6.结论总结22000076.0403mkg mm kg J J J •=•=+=负载丝杠总m N m N m N T T T •=•+•=+=112.0016.0096.0惯性矩摩擦力总Ws rad m N w T P 9.309.0/2.251112.09.0=*•=•=总m in/2400m in /60/40r s s r n =*=转速转盘质量M=100Kg 转盘直径D=840mm 要求转速0.2r/s 机械效率0.9电机启动时间0.5s1. 确定转盘惯量221R M J •=转盘角加速度转盘惯性矩β•=J T22882000042010021mm Kg mm Kg J •=**=)(惯性矩2/8.05.02*/2.0s rad ss r t w ππ启动角加速度===β [][]mN m N m N m s m Kg s m Kg s m Kg s rad m Kg J T •=•=•=⎥⎦⎤⎢⎣⎡••=⎥⎦⎤⎢⎣⎡•=⎥⎦⎤⎢⎣⎡•*=*•=•=2.222.2215584.22155840.22155840.228.0820000.8/8.0820000.82222222ππ角加速度转盘惯量惯性矩β2. 确定功率[][]WW s m N s m N rad m N s r m N wT P 9.348.022.02.22/8.022.02.228.022.02.228.022.02.228.02/2.02.22=**=•**=⎥⎦⎤⎢⎣⎡•**=**•=**•=•=πππππ惯性矩负载功率η3. 确定传动比2501min /3000min /12min /300060/2.0==*=r r r s s r n n 电机转盘4. 传动比分配:锥齿轮5,减速器505. 确定电机输出扭矩 mN T i T T •====088.0250/2.222501电机负载电机6.确定电机输出功率负载功率电机P K P •>5.1=KWW P 4.529.345.1=*>实际设计要求托盘+发动机质量:M=200Kg 加速时间:t=0.5S 升速:V=0.5m/s 丝杠导程:P=10mm 丝杠直径:D=45mm质心距离导轨:L=300mm 直线导轨间距:b=150mm 直线导轨摩擦系数=0.1 丝杠质量:m=8.5Kg1. 确定丝杠的顶升力 μ•++=N a F a g M F 2)(2/1/s m t v a ==NF Nm m N F L F mm N F F F LF L F d a g m N N N NN N N N 88002440015.0660********2)(2121==•=•=•==•+•=•+N F f N 8802=•=μNN N f a g M F a 30808802200=+=++•=)(2.轴向力等价扭矩πππ导程轴向力导程轴向力导程轴向力222P F T RP F R T R P F R T a a a •==•=[][]mN m N mm N mmN T •=•**=•*=*=9.42100010308021030802103080πππ轴向力3.确定丝杠转速sr r mm s mm r mm s m r mm s m P v n /50//1010005.0//105.0/10/5.0=⎥⎦⎤⎢⎣⎡*=⎥⎦⎤⎢⎣⎡===导程s rad s rad s r /100/250/50ππ*=*=5. 确定功率 1)确定外载功率Ws m N s rad m N w T P 15013149.4/1009.4=⎥⎦⎤⎢⎣⎡•*=*•=•=π外载功率2)确定丝杠加速扭矩222215245g 5.88181mm Kg mm K D m J •=•*=•=丝杠[][][]mN m s m Kg s m Kg s mm Kg ss rad mm Kg t w J J T •=••=•=•*=**•=•=•=43.0/43.0/1000000430400/5.010021525.0/1002152222222ππ丝杠丝杠丝杠惯性βWs m N s rad m N w T P 135135/10043.0=⎥⎦⎤⎢⎣⎡•=*•=•=π丝杠惯性矩丝杠惯量W PK P KW s r M N n T P m N m N T T T W W W P P P 21809.0/16352.1/635.19550/300021.5955021.543.078.416351351500=⨯=•==⨯•=•==•+•=+==+=+=η总实际总总丝杠惯性矩等价轴向力总丝杠惯性矩等价轴向力总验算:工装板数量:6个工装板质量:15Kg/个倍速链型号:BS30停留工装板数量:4传送工装板数量:2工装板长度:480mm/个倍速链质量:0.4Kg/m 线体长:10m线体速度:10m/min摩擦系数如下倍速链重量如下选型步骤:1. 确定倍速链受摩擦产生的拉力gf L L C f L C A f L A f L C H F c W r W W a W c W W ••++••++••+••+=1000)(1.1)(21221)(2.008.01.0/4.0/5.74215/g 1064156421=====•==•===r c a W WW f f f mKg C m Kg m Kg H m K m Kg A mL mLNs m m m Kg m m Kg m Kg m m Kg m m Kg m Kg F 213/1008.010/4.01.12.06)/4.0/10(1.06/1008.04/4.0/5.72=•⎥⎦⎤⎢⎣⎡•••+••++••+••+=)(确定扭矩m N mm N D F T p •=*=•=6282132链条确定转速及传动比srad s r w s r smm mm D v n p /62/95.0/95.06056min /10000=•==••=•=πππ 25min/60min /1500==r r i 确定功率W s rad NM wT P 36/66=•=•=链条。
电机减速机的选型计算
1参数要求
配重300kg,副屏重量为500kg,初选链轮的分度圆直径为164.09mm,链轮
齿数为27,(详见misimi手册P1145。副屏移动的最大速度为0.5m/s,加速时间
为1s。根据移动屏实际的受力状况,将模型简化为:
物体在竖直方向上受到的合力为:
惯惯21
21FFGGFh
其中:
11
5009.84900GmgN
22
3009.82940GmgN
1
10.55002501FmaN惯
1
20.53001501FmaN惯
所以:
490029402501502360hF
合力产生的力矩:
0.16409
23602193.6262hMFrNm
其中:r为链轮的半径
链轮的转速为:
0.56.1/0.082v
wradsr
6.1
(1/60)
58.3/min22wnr
2减速机的选型
速比的确定:
初选电机的额定转速为3000r/min
3000
51.558.3dnin
初选减速器的速比为50,减速器的输出扭矩由上面计算可知:
193.6262Nm
3电机的选型
传动方式为电机—减速机—齿轮-链轮-链条传动,将每一级的效率初定位为
0.9,则电机的扭矩为:
44
193.625.9500.9dM
TNmi
初选电机为松下,3000r/min,额定扭矩为:9.55Nm,功率3kw
转子转动惯量为7.85X10-4kgm2带制动器编码器,减速器为台湾行星
减速器,速比为50,额定扭矩为650NM
4惯量匹配
负载的转动惯量为:
222
(500300)0.0825.4Jmrkgm
转换到电机轴的转动惯量为:
31225.42.161050JJi
惯量比为:
3142.16102.757.8510dJJ
电机选型手册要求惯量比小于15,故所选电机减速器满足要求