误差理论与平差基础-第10章 误差椭圆
- 格式:ppt
- 大小:6.46 MB
- 文档页数:19
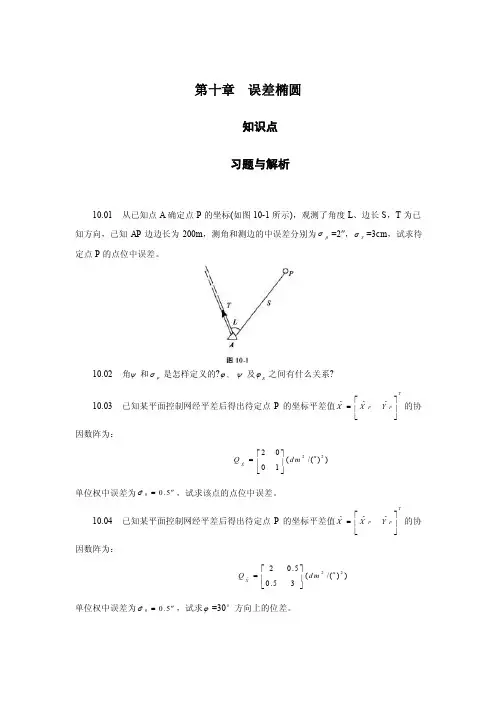
第十章 误差椭圆知识点习题与解析10.01 从已知点A 确定点P 的坐标(如图10-1所示),观测了角度L 、边长S ,T 为已知方向,已知AP 边边长为200m ,测角和测边的中误差分别为βσ=2″,S σ=3cm ,试求待定点P 的点位中误差。
10.02 角ψ和ψσ是怎样定义的?ψϕ、及E ϕ之间有什么关系?10.03 已知某平面控制网经平差后得出待定点P 的坐标平差值ˆˆˆTPP X X Y ⎡⎤=⎢⎥⎣⎦的协因数阵为:22ˆ20(/())01X Q d m ⎡⎤="⎢⎥⎣⎦单位权中误差为0ˆ0.5σ=",试求该点的点位中误差。
10.04 已知某平面控制网经平差后得出待定点P 的坐标平差值ˆˆˆTPP X XY ⎡⎤=⎢⎥⎣⎦的协因数阵为:22ˆ20.5(/())0.53X Q d m ⎡⎤="⎢⎥⎣⎦单位权中误差为0ˆ0.5σ=",试求ϕ=30°方向上的位差。
10.05 在某测边网中,设待定点P 1的坐标为未知参数,即11ˆTXX Y ⎡⎤=⎢⎥⎣⎦,平差后得到ˆX的协因数阵为⎥⎦⎤⎢⎣⎡=∧∧75.015.015.025.0XX Q ,且单位权方差220ˆ 3.0cm σ=。
(1)计算P 1点纵、横坐标中误差和点位中误差; (2)计算P 1点误差椭圆三要素E ϕ、E 、F ; (3)计算P 1点在方位角为90°方向上的位差。
10.06 在某测边网中,设待定点P 1的坐标为未知参数,即11ˆˆˆTXX Y ⎡⎤=⎣⎦,平差后得到x 的协因数阵为⎥⎦⎤⎢⎣⎡--=∧∧25.125.025.075.1XX Q,且单位权中误差0ˆσ=cm 。
(1)计算P 1点误差椭圆三要素E ϕ、E 、F ; (2)计算P 2点在方位角为45°方向上的位差。
10.07 已知平差后待定点P 坐标的协因数和互协因数为∧∧∧∧Y X Y X 、Q、QQ 则当∧∧YX Q=0且∧∧YX>QQ 时,P 点位差的极大值方向为 ,E ϕ= ;位差的极小值方向为 ,F ϕ= 。
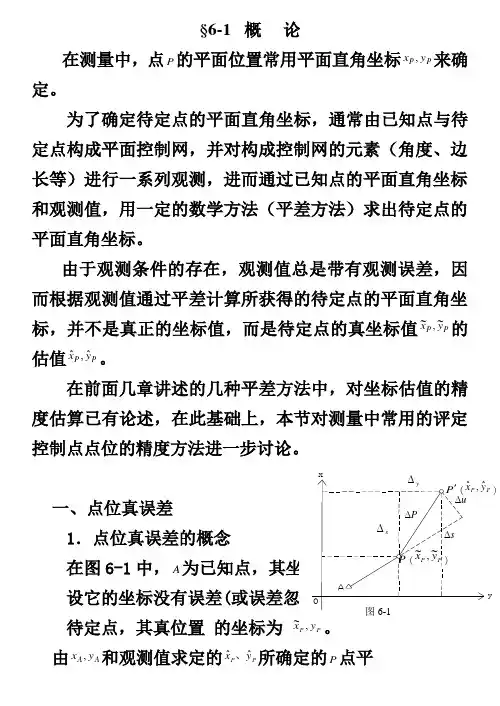
§6-1 概 论在测量中,点P 的平面位置常用平面直角坐标P P y x ,来确定。
为了确定待定点的平面直角坐标,通常由已知点与待定点构成平面控制网,并对构成控制网的元素(角度、边长等)进行一系列观测,进而通过已知点的平面直角坐标和观测值,用一定的数学方法(平差方法)求出待定点的平面直角坐标。
由于观测条件的存在,观测值总是带有观测误差,因而根据观测值通过平差计算所获得的待定点的平面直角坐P P y x ~,~面位置并不是 P 点的真位置,而是最或然点位, 记为 P ',在 P 和 P '对应的这两对坐标之间 存在着坐标真误差 x∆和 y∆。
由图6-1知⎭⎬⎫-=∆-=∆P P y P P x y y x x ˆ~ˆ~ (6-l-1) 由于x ∆和y ∆的存在而产生的距离P ∆称为 P 点的点位真误差,简称真位差。
由图6-1知222yxP∆+∆=∆222y xPσσσ+=(6-1-2)2.点位真误差的随机性P 点的最或然坐标Px ˆ和P yˆ是由一组带有观测误差的观测值通过平差所求得的结果,因此,它们是观测值的函数。
设P xˆ和P y ˆ与观测值向量L 之间的线性函数关系为 ⎭⎬⎫++=++=00ˆˆββααL y y L x xA P A P(6-1-3)设有两组不同的观测值向量1L 、2L ,分别代入式(6-1-3)可得010111ˆˆββαα++=++=L y yL x xA P A P 和020222ˆˆββαα++=++=L y yL x xA P A P对于同一控制网而言,如果观测量相同(如同样的角度、边长等),采取同样的平差方法,则式中的00βαβα、、、是不变量,但观测值向量1L 、2L 不会相等,因此21ˆˆP P x x ≠、21ˆˆP P y y ≠。
可见,随着观测值L 的不同,P x ˆ和P y ˆ也将取得不同的数值。
但P 点的真坐标P x ~和P y ~是唯一的,由式(6-l-1)、(6-l-2)知,就会出现不同的x ∆和y∆值以及P∆,所以说点位真误差随观测值不同而变化,即点位真误差具有随机性。
误差椭圆的定义嘿,朋友们!今天咱来聊聊误差椭圆呀!你说这误差椭圆,就好像是个调皮的小精灵,在测量的世界里蹦来蹦去。
想象一下哈,我们在测量一个东西的时候,就像是在黑暗中摸索,总会有些许偏差,而这个误差椭圆呢,就是把这些偏差给圈起来,告诉我们大致的范围。
它可不是随随便便就出现的,那是经过一番计算和琢磨才现身的呢!比如说我们要确定一个点的位置吧,实际测出来的可能就不是那么精准,会有这儿一点儿偏差,那儿一点儿偏差。
这时候误差椭圆就跳出来啦,说:“嘿,别担心,这个点大概就在我圈的这个范围里哦!”是不是很神奇?它就像是给我们测量结果加上了一个边界,让我们心里有个底。
就好比你要去一个地方,有人告诉你大概就在这一片儿,总比啥都不知道好吧!而且啊,误差椭圆还挺有个性的呢!它的大小和形状会根据不同的情况而变化。
有时候它扁扁的,有时候又圆圆的,就像个会变形的小怪物。
这可都是根据测量的数据来决定的呀!咱再打个比方,误差椭圆就像是一个神秘的领地,我们知道它的大致范围,但里面具体的情况还得我们去慢慢探索。
这探索的过程可有意思了,每一次测量都像是在给这个领地绘制更详细的地图。
你说要是没有误差椭圆,那我们测量出来的东西不就像没头苍蝇一样,不知道到底准不准确啦?它可是给我们指明了一个方向,让我们能更好地理解和处理测量的结果。
在实际应用中,误差椭圆可重要了呢!比如在建筑工地上,工程师们得靠它来确保建筑物的位置准确无误;在地图绘制中,它能帮助绘制出更精确的地图。
没有它,那可真是乱了套了呀!总之呢,误差椭圆这个小家伙虽然有时候让人有点头疼,但它确实是我们测量工作中不可或缺的好帮手呀!它让我们在面对不确定性的时候,能有个大概的把握,不至于两眼一抹黑。
所以啊,咱可得好好认识它、了解它,让它为我们的工作和生活发挥更大的作用呀!你们说是不是这个理儿呢?。
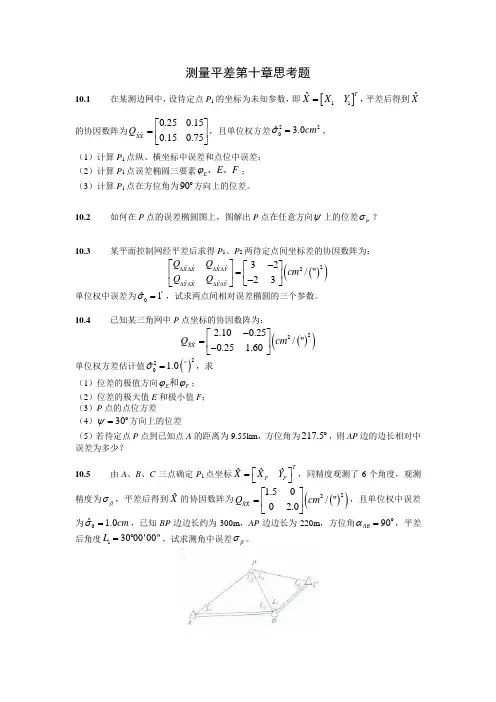
测量平差第十章思考题10.1 在某测边网中,设待定点P 1的坐标为未知参数,即[]11ˆT X X Y =,平差后得到ˆX 的协因数阵为ˆˆ0.250.150.150.75XX Q ⎡⎤=⎢⎥⎣⎦,且单位权方差220ˆ 3.0cm σ=, (1)计算P 1点纵、横坐标中误差和点位中误差;(2)计算P 1点误差椭圆三要素E E F ϕ、、;(3)计算P 1点在方位角为90方向上的位差。
10.2如何在P 点的误差椭圆图上,图解出P 点在任意方向ψ上的位差ψσ?10.3 某平面控制网经平差后求得P 1、P 2两待定点间坐标差的协因数阵为:()()2ˆˆˆˆ2ˆˆˆˆ32/"23X X X Y Y XY Y Q Q cm Q Q ∆∆∆∆∆∆∆∆-⎡⎤⎡⎤=⎢⎥⎢⎥-⎣⎦⎣⎦ 单位权中误差为"0ˆ1σ=,试求两点间相对误差椭圆的三个参数。
10.4 已知某三角网中P 点坐标的协因数阵为:()()22ˆˆ 2.100.25/"0.25 1.60XX Q cm -⎡⎤=⎢⎥-⎣⎦ 单位权方差估计值()22"0ˆ 1.0σ=,求 (1)位差的极值方向E F ϕϕ和;(2)位差的极大值E 和极小值F ;(3)P 点的点位方差(4)30ψ=方向上的位差(5)若待定点P 点到已知点A 的距离为9.55km ,方位角为217.5,则AP 边的边长相对中误差为多少?10.5 由A 、B 、C 三点确定P 1点坐标ˆˆˆT P P X X Y ⎡⎤=⎣⎦,同精度观测了6个角度,观测精度为βσ,平差后得到ˆX 的协因数阵为()()22ˆˆ 1.50/"0 2.0XX Q cm ⎡⎤=⎢⎥⎣⎦,且单位权中误差为0ˆ 1.0cm σ=,已知BP 边边长约为300m ,AP 边边长为220m ,方位角90AB α=,平差后角度13000'00"L =,试求测角中误差βσ。