A VLSI Architecture for Image Registration
- 格式:pdf
- 大小:873.62 KB
- 文档页数:9

Introduction to Artificial Intelligence智慧树知到课后章节答案2023年下哈尔滨工程大学哈尔滨工程大学第一章测试1.All life has intelligence The following statements about intelligence arewrong()A:All life has intelligence B:Bacteria do not have intelligence C:At present,human intelligence is the highest level of nature D:From the perspective of life, intelligence is the basic ability of life to adapt to the natural world答案:Bacteria do not have intelligence2.Which of the following techniques is unsupervised learning in artificialintelligence?()A:Neural network B:Support vector machine C:Decision tree D:Clustering答案:Clustering3.To which period can the history of the development of artificial intelligencebe traced back?()A:1970s B:Late 19th century C:Early 21st century D:1950s答案:Late 19th century4.Which of the following fields does not belong to the scope of artificialintelligence application?()A:Aviation B:Medical C:Agriculture D:Finance答案:Aviation5.The first artificial neuron model in human history was the MP model,proposed by Hebb.()A:对 B:错答案:错6.Big data will bring considerable value in government public services, medicalservices, retail, manufacturing, and personal location services. ()A:错 B:对答案:对第二章测试1.Which of the following options is not human reason:()A:Value rationality B:Intellectual rationality C:Methodological rationalityD:Cognitive rationality答案:Intellectual rationality2.When did life begin? ()A:Between 10 billion and 4.5 billion years B:Between 13.8 billion years and10 billion years C:Between 4.5 billion and 3.5 billion years D:Before 13.8billion years答案:Between 4.5 billion and 3.5 billion years3.Which of the following statements is true regarding the philosophicalthinking about artificial intelligence?()A:Philosophical thinking has hindered the progress of artificial intelligence.B:Philosophical thinking has contributed to the development of artificialintelligence. C:Philosophical thinking is only concerned with the ethicalimplications of artificial intelligence. D:Philosophical thinking has no impact on the development of artificial intelligence.答案:Philosophical thinking has contributed to the development ofartificial intelligence.4.What is the rational nature of artificial intelligence?()A:The ability to communicate effectively with humans. B:The ability to feel emotions and express creativity. C:The ability to reason and make logicaldeductions. D:The ability to learn from experience and adapt to newsituations.答案:The ability to reason and make logical deductions.5.Which of the following statements is true regarding the rational nature ofartificial intelligence?()A:The rational nature of artificial intelligence includes emotional intelligence.B:The rational nature of artificial intelligence is limited to logical reasoning.C:The rational nature of artificial intelligence is not important for itsdevelopment. D:The rational nature of artificial intelligence is only concerned with mathematical calculations.答案:The rational nature of artificial intelligence is limited to logicalreasoning.6.Connectionism believes that the basic element of human thinking is symbol,not neuron; Human's cognitive process is a self-organization process ofsymbol operation rather than weight. ()A:对 B:错答案:错第三章测试1.The brain of all organisms can be divided into three primitive parts:forebrain, midbrain and hindbrain. Specifically, the human brain is composed of brainstem, cerebellum and brain (forebrain). ()A:错 B:对答案:对2.The neural connections in the brain are chaotic. ()A:对 B:错答案:错3.The following statement about the left and right half of the brain and itsfunction is wrong ().A:When dictating questions, the left brain is responsible for logical thinking,and the right brain is responsible for language description. B:The left brain is like a scientist, good at abstract thinking and complex calculation, but lacking rich emotion. C:The right brain is like an artist, creative in music, art andother artistic activities, and rich in emotion D:The left and right hemispheres of the brain have the same shape, but their functions are quite different. They are generally called the left brain and the right brain respectively.答案:When dictating questions, the left brain is responsible for logicalthinking, and the right brain is responsible for language description.4.What is the basic unit of the nervous system?()A:Neuron B:Gene C:Atom D:Molecule答案:Neuron5.What is the role of the prefrontal cortex in cognitive functions?()A:It is responsible for sensory processing. B:It is involved in emotionalprocessing. C:It is responsible for higher-level cognitive functions. D:It isinvolved in motor control.答案:It is responsible for higher-level cognitive functions.6.What is the definition of intelligence?()A:The ability to communicate effectively. B:The ability to perform physicaltasks. C:The ability to acquire and apply knowledge and skills. D:The abilityto regulate emotions.答案:The ability to acquire and apply knowledge and skills.第四章测试1.The forward propagation neural network is based on the mathematicalmodel of neurons and is composed of neurons connected together by specific connection methods. Different artificial neural networks generally havedifferent structures, but the basis is still the mathematical model of neurons.()A:对 B:错答案:对2.In the perceptron, the weights are adjusted by learning so that the networkcan get the desired output for any input. ()A:对 B:错答案:对3.Convolution neural network is a feedforward neural network, which hasmany advantages and has excellent performance for large image processing.Among the following options, the advantage of convolution neural network is().A:Implicit learning avoids explicit feature extraction B:Weight sharingC:Translation invariance D:Strong robustness答案:Implicit learning avoids explicit feature extraction;Weightsharing;Strong robustness4.In a feedforward neural network, information travels in which direction?()A:Forward B:Both A and B C:None of the above D:Backward答案:Forward5.What is the main feature of a convolutional neural network?()A:They are used for speech recognition. B:They are used for natural languageprocessing. C:They are used for reinforcement learning. D:They are used forimage recognition.答案:They are used for image recognition.6.Which of the following is a characteristic of deep neural networks?()A:They require less training data than shallow neural networks. B:They havefewer hidden layers than shallow neural networks. C:They have loweraccuracy than shallow neural networks. D:They are more computationallyexpensive than shallow neural networks.答案:They are more computationally expensive than shallow neuralnetworks.第五章测试1.Machine learning refers to how the computer simulates or realizes humanlearning behavior to obtain new knowledge or skills, and reorganizes the existing knowledge structure to continuously improve its own performance.()A:对 B:错答案:对2.The best decision sequence of Markov decision process is solved by Bellmanequation, and the value of each state is determined not only by the current state but also by the later state.()A:对 B:错答案:对3.Alex Net's contributions to this work include: ().A:Use GPUNVIDIAGTX580 to reduce the training time B:Use the modified linear unit (Re LU) as the nonlinear activation function C:Cover the larger pool to avoid the average effect of average pool D:Use the Dropouttechnology to selectively ignore the single neuron during training to avoid over-fitting the model答案:Use GPUNVIDIAGTX580 to reduce the training time;Use themodified linear unit (Re LU) as the nonlinear activation function;Cover the larger pool to avoid the average effect of average pool;Use theDropout technology to selectively ignore the single neuron duringtraining to avoid over-fitting the model4.In supervised learning, what is the role of the labeled data?()A:To evaluate the model B:To train the model C:None of the above D:To test the model答案:To train the model5.In reinforcement learning, what is the goal of the agent?()A:To identify patterns in input data B:To minimize the error between thepredicted and actual output C:To maximize the reward obtained from theenvironment D:To classify input data into different categories答案:To maximize the reward obtained from the environment6.Which of the following is a characteristic of transfer learning?()A:It can only be used for supervised learning tasks B:It requires a largeamount of labeled data C:It involves transferring knowledge from onedomain to another D:It is only applicable to small-scale problems答案:It involves transferring knowledge from one domain to another第六章测试1.Image segmentation is the technology and process of dividing an image intoseveral specific regions with unique properties and proposing objects ofinterest. In the following statement about image segmentation algorithm, the error is ().A:Region growth method is to complete the segmentation by calculating the mean vector of the offset. B:Watershed algorithm, MeanShift segmentation,region growth and Ostu threshold segmentation can complete imagesegmentation. C:Watershed algorithm is often used to segment the objectsconnected in the image. D:Otsu threshold segmentation, also known as themaximum between-class difference method, realizes the automatic selection of global threshold T by counting the histogram characteristics of the entire image答案:Region growth method is to complete the segmentation bycalculating the mean vector of the offset.2.Camera calibration is a key step when using machine vision to measureobjects. Its calibration accuracy will directly affect the measurementaccuracy. Among them, camera calibration generally involves the mutualconversion of object point coordinates in several coordinate systems. So,what coordinate systems do you mean by "several coordinate systems" here?()A:Image coordinate system B:Image plane coordinate system C:Cameracoordinate system D:World coordinate system答案:Image coordinate system;Image plane coordinate system;Camera coordinate system;World coordinate systemmonly used digital image filtering methods:().A:bilateral filtering B:median filter C:mean filtering D:Gaussian filter答案:bilateral filtering;median filter;mean filtering;Gaussian filter4.Application areas of digital image processing include:()A:Industrial inspection B:Biomedical Science C:Scenario simulation D:remote sensing答案:Industrial inspection;Biomedical Science5.Image segmentation is the technology and process of dividing an image intoseveral specific regions with unique properties and proposing objects ofinterest. In the following statement about image segmentation algorithm, the error is ( ).A:Otsu threshold segmentation, also known as the maximum between-class difference method, realizes the automatic selection of global threshold T by counting the histogram characteristics of the entire imageB: Watershed algorithm is often used to segment the objects connected in the image. C:Region growth method is to complete the segmentation bycalculating the mean vector of the offset. D:Watershed algorithm, MeanShift segmentation, region growth and Ostu threshold segmentation can complete image segmentation.答案:Region growth method is to complete the segmentation bycalculating the mean vector of the offset.第七章测试1.Blind search can be applied to many different search problems, but it has notbeen widely used due to its low efficiency.()A:错 B:对答案:对2.Which of the following search methods uses a FIFO queue ().A:width-first search B:random search C:depth-first search D:generation-test method答案:width-first search3.What causes the complexity of the semantic network ().A:There is no recognized formal representation system B:The quantifiernetwork is inadequate C:The means of knowledge representation are diverse D:The relationship between nodes can be linear, nonlinear, or even recursive 答案:The means of knowledge representation are diverse;Therelationship between nodes can be linear, nonlinear, or even recursive4.In the knowledge graph taking Leonardo da Vinci as an example, the entity ofthe character represents a node, and the relationship between the artist and the character represents an edge. Search is the process of finding the actionsequence of an intelligent system.()A:对 B:错答案:对5.Which of the following statements about common methods of path search iswrong()A:When using the artificial potential field method, when there are someobstacles in any distance around the target point, it is easy to cause the path to be unreachable B:The A* algorithm occupies too much memory during the search, the search efficiency is reduced, and the optimal result cannot beguaranteed C:The artificial potential field method can quickly search for acollision-free path with strong flexibility D:A* algorithm can solve theshortest path of state space search答案:When using the artificial potential field method, when there aresome obstacles in any distance around the target point, it is easy tocause the path to be unreachable第八章测试1.The language, spoken language, written language, sign language and Pythonlanguage of human communication are all natural languages.()A:对 B:错答案:错2.The following statement about machine translation is wrong ().A:The analysis stage of machine translation is mainly lexical analysis andpragmatic analysis B:The essence of machine translation is the discovery and application of bilingual translation laws. C:The four stages of machinetranslation are retrieval, analysis, conversion and generation. D:At present,natural language machine translation generally takes sentences as thetranslation unit.答案:The analysis stage of machine translation is mainly lexical analysis and pragmatic analysis3.Which of the following fields does machine translation belong to? ()A:Expert system B:Machine learning C:Human sensory simulation D:Natural language system答案:Natural language system4.The following statements about language are wrong: ()。

高一英语建筑术语单选题50题1.The walls of this building are made of _____.A.steelsB.steelC.stonesD.stone答案:B。
本题考查建筑材料的名词用法。
steel 表示“钢”,是不可数名词,A 选项steels 错误;stone 表示“石头”,通常用作可数名词复数stones 或者不可数名词“stone”表示材料,但是题干中说的是墙的材料,应该用steel,因为钢是一种常用的建筑材料,而且是不可数名词。
2.This bridge is constructed with _____.A.concretesB.concreteC.woodsD.wood答案:B。
concrete 表示“混凝土”,是不可数名词,A 选项concretes 错误;wood 表示“木材”,通常用作不可数名词,但是表示“树林”时是可数名词,题干中说的是桥的建筑材料,应该用concrete,混凝土是建造桥梁常用的材料。
3.The roof of this house is covered with _____.A.tileB.tilesC.glassD.glasses答案:B。
tile 表示“瓦片”,是可数名词,A 选项tile 应该用复数形式;glass 表示“玻璃”,是不可数名词,题干中说的是屋顶覆盖的材料,通常是瓦片,所以用tiles。
4.This building has a foundation made of _____.A.bricksB.brickC.steelsD.steel答案:B。
brick 表示“砖”,是可数名词,但是在这里表示材料,用单数形式;steel 表示“钢”,通常不用来做建筑的基础材料,所以用brick。
5.The walls of this ancient building are made of _____.A.stonesB.stoneC.woodsD.wood答案:A。

课程名称的英文翻译英文字母开头的课程ALGOL语言ALGOL LanguageBASIC & FORTRAN 语言BASIC Language & FORTRAN LanguageBASIC 语言BASIC LanguageBASIC 语言及应用BASIC Language & ApplicationC 语言C LanguageC++程序设计C++ Program DesigningCAD 概论Introduction to CADCAD/CAM CAD/CAMCET-4 College English Test (Band 4)CET-6 College English Test (Band 6)COBOL语言COBOL LanguageCOBOL语言程序设计COBOL Language Program DesigningC与UNIX环境 C Language & Unix EnvironmentC语言科学计算方法Scientific Computation Method in CC语言与生物医学信息处理 C Language & Biomedical Information ProcessingdBASE Ⅲ课程设计Course Exercise in dBASE ⅢFORTRAN 77 语言FORTRAN 77 LanguageFORTRAN语言FORTRAN LanguageFoxBase程序设计FoxBase ProgrammingHopf代数Hopf AlgebraHopf代数与代数群量子群Hopf Algebra , Algebraic Group and Qua ntum GroupIBM-PC/XT Fundamentals of Microcomputer IBM-PC/XTIBM-PC微机原理Fundamentals of Microcomputer IBM-PCIBM汇编及高级语言的接口IBM Assembly & its Interfaces with Advanced Programming LanguagesInternet与Intranet技术Internet and Intranet TechnologyLSI设计基础Basic of LSI DesigningOS/2操作系统OS/2 Operation SystemPASCAL大型作业PASCAL Wide Range WorkingPASCAL课程设计Course Exercise in PASCALPASCAL语言PASCAL LanguagePC机原理Principle of PCUnix编程环境Unix Programming EnvironmentUnix操作系统分析Analysis of Unix SystemVLSI的EDA技术EDA Techniques for VLSIVLSI技术与检测方法VLSI Techniques & Its ExaminationVLSI设计基础Basis of VLSI DesignWindows系统Windows Operation SystemX光分析X-ray AnalysisX射线金属学X-Ray & MetallographyX射线与电镜X-ray & Electric MicroscopeZ-80汇编语言程序设计Z-80 Pragramming in Assembly LanguagesB开头的课程板壳非线性力学Nonlinear Mechanics of Plate and Shell板壳理论Plate Theory , Theory of Plate and Shell板壳力学Plate Mechanics办公自动化Office Automatization办公自动化系统毕业设计Office Automatization Thesis办公自动化系统设计Office Automatization Design半波实验Semiwave Experiment半导体变流技术Semiconductor Converting Technology半导体材料Semiconductor Materials半导体测量Measurement of Semiconductors半导体瓷敏元件Semiconductor Porcelain-Sensitive Elements半导体光电子学Semiconductor Optic Electronics半导体化学Semiconductor Chemistry半导体激光器Semiconductor Laser Unit半导体集成电路Semiconductor Integrated Circuitry半导体理论Semi-conductive Theory半导体器件Semiconductor Devices半导体器件工艺原理Technological Fundamentals of Semiconductor Device半导体器件课程设计Course Design of Semiconductor Devices半导体物理Semiconductor Physics半导体专业Semi-conduction Specialty半导体专业实验Specialty Experiment of Semiconductor半群理论Semi-group Theory保健食品监督评价Evaluation and Supervision on Health Food s保险学Insurance保险学Insurance报告文学专题Special Subject On Reportage报刊编辑学Newspaper & Magazine Editing报刊选读Selected Readings of Newspaper & Magazine报纸编辑学Newspaper Editing泵与风机Pumps and Fans泵与水机Pumps & Water Turbines毕业论文Graduation Thesis毕业设计Graduation Thesis毕业实习Graduation Practice编译方法Compilation Method编译方法Methods of Compiling编译技术Technique of Compiling编译原理Fundamentals of Compiling, Principles of Compiler编译原理课程设计Course Design of Compiling变电站的微机检测Computer Testing in Transformer Substation变电站的微机检测与控制Computer Testing & Control in Transformer Substation变分法与张量Calculus of V ariations & Tensor变分学Calculus of V ariations变流技术Semiconductor Converting Technology变质量系统热力学与新型回转压V ariable Quality System Thermal Mechanics & NeoRo 表面活性剂化学及应用Chemistry and Application of Surfactant表面活性物质Surface Reactive Materials并行处理Parallel Processing并行处理与并行程序设计Parallel Processing and Parallel Programming并行算法Parallel Algorithmic波谱学Spectroscopy, Wave Spectrum波谱学实验Spectroscopic Experiment薄膜光学Film Optics薄膜物理Thin Film Physics不育症的病因学Etiology of InfertilityC开头的课程材料的力学性能测试Measurement of Material Mechanical Performance材料化学Material Chemistry材料力学Mechanics of Materials财税法规与税务会计Laws and Regulations of Finance and Taxes财务案例分析Case Analysis of Finance Management财务案例分析Case Analysis of Financial Management财务报告分析Analysis of Financial Statement财务成本管理Financial Cost Management财务管理Financial Management, Financial Cost Management财务管理与分析Financial Management and Analysis财务会计Financial Accountancy财政学Public Finance财政与金融Finance & Banking财政与税收Finance & Revenue财政与税收理论Theories on Public Finance and Tax Revenue财政与信贷Finance & Credit操作系统Disk Operating System (DOS)操作系统课程设计Course Design in Disk Operating System操作系统与编译原理Disk Operating System & Fundamentals of Compiling操作系统原理Fundamentals of Disk Operating System, Principles of Operating System 测量技术基础Foundation of Measurement Technology测量原理与仪器设计Measurement Fundamentals & Meter Design测试技术Testing Technology测试与信号变换处理Testing & Signal Transformation Processing策波测量技术Technique of Whip Wave Measurement策略管理Strategic Management产品学Production产业经济学Industrial Economy产业组织Industrial Organization产业组织学Industrial Organization Technology常微分方程Ordinary Differential Equations场论Field Theory超导磁体及应用Superconductive Magnet & Application超导及应用Superconductive & Application超高真空科学与技术Science and Technology of Ultrahigh V acuum 60超精密加工和微细加工Super-Precision & Minuteness Processing超精微细加工Super-Precision & Minuteness Processing超声及应用Supersonics Application成本会计Cost Accounting成像原理与技术Principles & Technique of Imaging成组技术Grouping Technique城市规划原理Fundamentals of City Planning城市社会学Urban Sociology程控数字交换Program Controlling of Digital Exchange程序设计Program Designing程序设计方法学Methodology of Programming, Methods of Programming 程序设计及算法语言Program Designing & Algorithmic Language程序设计语言Programming Language齿轮啮合原理Principles of Gear Connection冲击测量及误差Punching Measurement & Error冲压工艺Sheet Metal Forming Technology抽象代数Abstract Algebra初等数学Primary Mathematics传坳概论Introduction to Pass Col传动概论Introduction to Transmission传感技术Sensor Technique传感技术及应用Sensor Technique & Application传感器及应用Sensors & Application传感器与检测技术Sensors & Testing Technology传感器原理Fundamentals of Sensors传感器原理及应用Fundamentals of Sensors & Application传热学Heat Transfer船舶操纵Ship Controlling船舶电力系统Ship Electrical Power System船舶电力系统课程设计Course Exercise in Ship Electrical Power System 船舶电气传动自动化Ship Electrified Transmission Automation船舶电站Ship Power Station船舶动力装置Ship Power Equipment船舶概论Introduction to Ships船舶焊接与材料Welding & Materials on Ship船舶机械控制技术Mechanic Control Technology for Ships船舶机械拖动Ship Mechanic Towage船舶建筑美学Artistic Designing of Ships船舶结构Ship Structure船舶结构力学Structural Mechanics for Ships船舶结构与制图Ship Structure & Graphing船舶静力学Ship Statics船舶强度与结构设计Designing Ship Intensity & Structure船舶设计原理Principles of Ship Designing船舶推进Ship Propelling船舶摇摆Ship Swaying船舶摇摆与操纵Ship Swaying & Manipulating船舶振动Ship V ibration船舶阻力Ship Resistance船体建造工艺Ship-Building Technology船体结构Ship Structure船体结构图Ship Structure Graphing船体结构与制图Ship Structure & Graphing船体振动学Ship V ibration船体制图Ship Graphing船用电器设备Marine Electrical Equipment创造心理学Creativity Psychology词汇学Lexicology磁测量技术Magnetic Measurement Technology磁传感器Magnetic Sensor磁存储设备设计原理Fundamental Design of Magnetic Memory Equipment磁记录Magnetographic磁记录技术Magnetographic Technology磁记录物理Magnetographic Physics磁路设计与场计算Magnetic Path Designing & Magnetic Field Calculati磁盘控制器Magnetic Disk Controler磁性材料Magnetic Materials磁性测量Magnetic Measurement磁性物理Magnetophysics磁原理及应用Principles of Catalyzation & Application催化原理Principles of CatalysisD开头的课程大电流测量Super-Current Measurement大电源测量Super-Power Measurement大机组协调控制Coordination & Control of Generator Networks大跨度房屋结构Large-Span House structure大型锅炉概况Introduction to Large-V olume Boilers大型火电机组控制Control of Large Thermal Power Generator Networks大型数据库原理与高级开发技术Principles of Large-Scale Data-Bas e and Advanced Development Technology大学德语College German大学俄语College Russian大学法语College French大学日语College Japanese大学生心理学Psychology Introduction大学物理College Physics大学物理实验Experiment of College Physics大学英语College English大学语文College Chinese大众传播学Mass Media代数几何Algebraic Geometry代数几何Algebraic Geometry代数曲面Algebraic Surfaces代数图论Algebraic Graph Theory代数拓扑Algebraic Topology代数学Algebra代用燃料Substitute Fuel代用运放电路Simulated Transmittal Circuit单片机与接口技术Mono-Chip Computers & Interface Technique单片机原理Fundamentals of Mono-Chip Computers单片机原理及应用Fundamentals of Mono-Chip Computers & Applications弹塑性力学Elastic-Plastic Mechanics弹性波Elastic Waves弹性力学Elastic Mechanics, Theory of Elastic Mechanics弹性元件的理论及设计Theory and Design of Elastic Element蛋白质结构基础Principle of Protein Structure蛋白质生物化学技术Biochemical Technology of Protein当代国际关系Contemporary International Relationship当代国外社会思维评价Evaluation of Contemporary Foreign Social Thought 当代文学Contemporary Literature当代文学专题Topics on Contemporary Literature当代西方哲学Contemporary Western Philosophy当代戏剧与电影Contemporary Drama & Films当代资本主义经济Contemporary Capitalist Economy党史History of the Party导波光学Wave Guiding Optics德育Moral Education等离子体工程Plasma Engineering低频电子线路Low Frequency Electric Circuit低温测试技术Cryo Testing Technique低温传热学Cryo Conduction低温固体物理Cryo Solid Physics低温技术原理与装置Fundamentals of Cryo Technology & Equipment低温技术中的微机原理Priciples of Microcomputer in Cryo Technology低温绝热Cryo Heat Insulation低温气体制冷机Cryo Gas Refrigerator低温热管Cryo Heat Tube低温设备Cryo Equipment低温生物冻干技术Biological Cryo Freezing Drying Technology低温生物学原理与应用Principle & Application of Cryobiology低温实验技术Cryo Experimentation Technology低温物理导论Cryo Physic Concepts低温物理概论Cryo Physic Concepts低温仪表及测试Cryo Meters & Measurement低温原理Cryo Fundamentals低温原理与设备Cryo Fundamentals & Equipment低温制冷机Cryo Refrigerator低温中的微机应用Application of Microcomputer in Cryo Technology低温装置Cryo Equipment低噪声电子电路Low-Noise Electric Circuit低噪声电子设计Low-Noise Electronic Designing低噪声放大与弱检Low-Noise Increasing & Decreasing低噪声与弱信号检测Detection of Low Noise & Weak Signals地基基础课程设计Course Design of Groundsill Basis地理Geography第二次世界大战史History of World War II典型计算机分析Classical Computer Analysis电测量技术Electric Measurement Technology电厂计算机控制系统Computer Control System in Power Plants电磁测量实验技术Electromagnetic Measurement Experiment & Technology 电磁场计算机Electromagnetic Field Computers电磁场理论Theory of Electromagnetic Fields电磁场数值计算Numerical Calculation of Electromagnetic Fields电磁场与电磁波Electromagnetic Fields & Magnetic Waves电磁场与微波技术Electromagnetic Fields & Micro-Wave Technology电磁场中的数值方法Numerical Methods in Electromagnetic Fields电磁场中的数值计算Numerical Calculation in Electromagnetic Fields电磁学Electromagnetics电动力学Electrodynamics电镀Plating电分析化学Electro-Analytical Chemistry电工材料Electrical Materials电工测量技术基础Measurement Technology of Electrical Engineering电工测试技术基础Testing Technology of Electrical Engineering电工产品学Electrotechnical Products电工电子技术基础Electrical Technology & Electrical Engineering电工电子学Electronics in Electrical Engineering电工基础Fundamental Theory of Electrical Engineering电工基础理论Fundamental Theory of Electrical Engineering电工基础实验Basic Experiment in Electrical Engineering电工技术Electrotechnics电工技术基础Fundamentals of Electrotechnics电工实习Electrical Engineering Practice电工实验Experiment of Electrical Engineering电工实验技术基础Experiment Technology of Electrical Engineering电工学Electrical Engineering电工与电机控制Electrical Engineering & Motor Control电弧电接触Electrical Arc Contact电弧焊及电渣焊Electric Arc Welding & Electroslag Welding电化学测试技术Electrochemical Measurement Technology电化学工程Electrochemical Engineering电化学工艺学Electrochemical Technology电机Motor电机测试技术Motor Measuring Technology电机电磁场的分析与计算Analysis & Calculation of Electrical Motor &电机电磁场的数值计算Calculation of Electrical Motor & Electromagnetic Fields 电机电磁场理论Theory of Electrical Moto & Electromagnetic Fields电机电器与供电Motor Elements and Power Supply电机矩阵分析法Analysis of Electrical Motor Matrix电机课程设计Course Exercise in Electric Engine电机绕组理论Theory of Motor Winding电机绕组理论及应用Theory & Application of Motor Winding电机设计Design of Electrical Motor电机瞬变过程Electrical Motor Change Processes电机统一理论Theory of Electrical Motor Integration电机学Electrical Motor电机学及控制电机Electrical Machinery Control & Technology电机与拖动Electrical Machinery & Towage电机原理Principle of Electric Engine电机原理与拖动Principles of Electrical Machinery & Towage电机专题Lectures on Electric Engine电接触与电弧Electrical Contact & Electrical Arc电介质物理Dielectric Physics电镜Electronic Speculum电力电子电路Power Electronic Circuit电力电子电器Power Electronic Equipment电力电子器件Power Electronic Devices电力电子学Power Electronics电力工程Electrical Power Engineering电力企业管理Management of Electrical Enterprise电力生产技术Technology of Electrical Power Generation电力生产优化管理Optimal Management of Electrical Power Generation电力拖动Electric Traction电力拖动基础Fundamentals for Electrical Towage电力拖动控制系统Electrical Towage Control Systems电力拖动与电气控制Electrical Towage & Electrical Control电力系统Power Systems电力系统电源最优化规划Optimal Planning of Power Source in a Power System 电力系统短路Power System Shortcuts电力系统分析Power System Analysis电力系统规划Power System Planning电力系统过电压Hyper-V oltage of Power Systems电力系统继电保护原理Power System Relay Protection电力系统经济分析Economical Analysis of Power Systems电力系统经济运行Economical Operation of Power Systems电力系统可靠性Power System Reliability电力系统可靠性分析Power System Reliability Analysis电力系统课程设计Course Design of Power Systems电力系统无功补偿及应用Non-Work Compensation in Power Systems & Applicati 电力系统谐波Harmonious Waves in Power Systems电力系统优化设计Optimal Designing of Power Systems电力系统远动Operation of Electric Systems电力系统远动技术Operation Technique of Electric Systems电力系统运行Operation of Electric Systems电力系统自动化Automation of Electric Systems电力系统自动装置Power System Automation Equipment电力系统最优规划Optimal Planning in Power System电力装置课程设计Course Design of Power Equipment电力装置与系统Power Equipment & System电路测量与实验Circuit Measurement & Experiment电路测试技术Circuit Measurement Technology电路测试技术基础Fundamentals of Circuit Measurement Technology电路测试技术及实验Circuit Measurement Technology & Experiments电路分析基础Basis of Circuit Analysis电路分析基础实验Basic Experiment on Circuit Analysis电路分析实验Experiment on Circuit Analysis电路和电子技术Circuit and Electronic Technique电路基本理论Basis Theory of Circuitry电路及电子线路CAD Circuitry CAD电路理论Theory of Circuit电路理论基础Fundamental Theory of Circuit电路理论实验Experiments in Theory of Circuct电路设计与测试技术Circuit Designing & Measurement Technology电气测量技术Electrical Measurement Technology电气传动Electrified Transmission电气控制技术Electrical Control Technology电器设计Electrical Appliances Designing电器学Electrical Appliances电器与控制Electrical Appliances & Control电生理技术基础Basics of Electricphysiological Technology电视传感器图象显示Television Sensor Graphic Display电视接收技术Television Reception Technology电视节目Television Programs电视节目制作Television Program Designing电视新技术New Television Technology电视新闻Television News电视原理Principles of Television电网调度自动化Automation of Electric Network Management电学实验Electrical Experiment电影艺术Art of Film Making电站微机检测控制Computerized Measurement & Control of Power Statio电子材料与元件测试技术Measuring Technology of Electronic Material and Element电子材料元件Electronic Material and Element电子材料元件测量Electronic Material and Element Measurement电子测量与实验技术Technology of Electronic Measurement & Experiment电子测试Electronic Testing电子测试技术Electronic Testing Technology电子测试技术与实验Electronic Testing Technology & Experiment电子测试实验Electronic Testing Experiment电子测试与实验技术Electronic Testing Technology & Experiment电子机械运动控制技术Technology of Electronic Mechanic Movement Control电子技术Technology of Electronics电子技术腐蚀测试中的应用Application of Electronic Technology in Erosion Measurement 电子技术基础Basic Electronic Technology电子技术基础与实验Basic Electronic Technology & Experiment电子技术课程设计Course Exercise in Electronic Technology电子技术实验Experiment in Electronic Technology电子技术综合性设计实验Experiment in Electronic Technology电子理论实验Experiment in Electronic Theory电子商务Electronic Commerce电子系统的ASIC技术ASIC Design Technologies电子显微分析Electronic Micro-Analysis电子显微镜Electronic Microscope电子线路Electronic Circuit电子线路的计算机辅助设计Computer Associate Design of Electronic Circuit电子线路课程设计Course Design of Electronic Circuit电子线路设计与测试技术Electronic Circuit Design & Measurement Technology电子线路设计与测试实验Electronic Circuit Design & Measurement Experiment电子线路实验Experiment in Electronic Circuit电子学Electronics电子学课程设计Course Design of Electronics电子照相技术Electronic Photographing Technology雕塑艺术欣赏Appreciation of Sculptural Art调节原理Principles of Regulation调节装置Regulation Equipment动力机械CAD Dynamical Machine CAD动力学Dynamics动态规划Dynamic Programming动态无损检测Dynamic Non-Destruction Measurement动态信号Dynamic Signal动态信号分析与仪器Dynamic Signal Analysis & Apparatus动物病害学基础Basis of Animal Disease动物免疫学Animal Immunology动物生理与分子生物学Animal Physiology and Molecular Biochemistry动物学Zoology动物遗传工程Animal Genetic Engineering毒理遗传学Toxicological Genetics断裂力学Fracture Mechanics断裂疲劳力学Fatigue Fracture Mechanics锻压测试技术Forging Testing Technique锻压工艺Forging Technology锻压机械液压传动Hydraulic Transmission in Forging Machinery锻压加热设备Forging Heating Equipment锻压设备专题Lectures on Forging Press Equipments锻压系统动力学Dynamics of Forging System锻造工艺Forging Technology锻造加热设备Forging Heat Equipment对外贸易保险International Trade Insurance对外贸易地理International Marketing Geography对外贸易概论Introduction to International Trade对外贸易运输International Trade Transportation多层网络方法Multi-Layer Network Technology多复变函数Analytic Functions of Several Complex V ariables多媒体计算机技术Multimedia Computer Technology多媒体技术Multimedia Technology多目标优化方法Multipurpose Optimal Method多项距阵Multi-Nominal Matrix多元统计分析Multivariable StatisticsF开头的课程发电厂Power Plant发电厂电气部分Electric Elements of Power Plants发电厂电气部分与动力部分Electric Elements & Dynamics of Power Plants发电厂电气部分与热力设备Electric Elements & Thermodynamics Equipment of Power Plants 发电厂计算机控制Computer Control in Power Plant发酵工程Zymolysis Engineering发育生物学原理与实验技术Principle and Experimental Technology of Development发展经济学Evolutive Economics法理学Nomology法律基础Fundamentals of Law法学概论An Introduction to Science of Law法学基础Fundamentals of Science of Law翻译Translation翻译理论与技巧Theory & Skills of Translation反不正当经济法Anti-malfeasance Economic Law泛读Extensive Reading泛函分析Functional Analysis泛函分析Functional Analysis房屋建筑学Architectural Design & Construction房屋建筑学课程设计Course Design of House Architecture仿真与辅助设计Simulation & Computer Aided Design放射生物学Radiation Biology放射学Radiology非电量测量Non-Electricity Measurement非金属材料Non-Metal Materials非线性采样系统Non-Linear Sampling System非线性方程组的数值解法Numerical Methods for No-linear System s of Equations非线性光学Nonlinear Optics非线性规划Non-Linear Programming非线性控制理论Non-Linear Control Theory非线性双曲型守恒律解的存在性The Existence of Solutions for Non -linear Hyperbolic Conservation Laws非线性物理导论Introduction to Nonlinear Physics非线性振荡Non-Linear Oscillation非线性振动Nonlinear V ibration废水处理工程Technology of Wastewater Treatment废水处理与回用Sewage Disposal and Re-use沸腾燃烧Boiling Combustion分布式计算机系统Distributed Computer System / Distributed System分布式系统与分布式处理Distributed Systems and Distributed Processing分离科学Separation Science分析化学Analytical Chemistry分析化学实验Analytical Chemistry Experiment分析力学Analytic Mechanics分析生物化学Analytical Biochemistry分析生物化学Analytical Biochemistry分子病毒学Molecular Virology分子进化工程Engineering of Molecular Evolution分子生物学Molecular Biology分子生物学技术Protocols in Molecular Biology分子遗传学Molecular Genetics风机调节Fan Regulation风机调节.使用.运转Regulation, Application & Operation of Fans风机三元流动理论与设计Tri-V ariant Movement Theory & Design of Fans风能利用Wind Power Utilization风险投资分析Analysis of Risk Investment服务业营销Service Industry Marketing辅助机械Aided Machine腐蚀电化学实验Experiment in Erosive Electrochemistry复变函数Complex V ariables Functions复变函数与积分变换Functions of Complex V ariables & Integral Transformation复合材料结构力学Structural Mechanics of Composite Material 复合材料力学Compound Material Mechanics傅里叶光学Fourier OpticsG开头的课程概率论Probability Theory概率论与数理统计Probability Theory & Mathematical Statistics 概率论与随机过程Probability Theory & Stochastic Process概率与统计Probability & Statistics钢笔画Pen Drawing钢的热处理Heat-Treatment of Steel钢结构Steel Structure钢筋混凝土Reinforced Concrete钢筋混凝土及砖石结构Reinforced Concrete & Brick Structure 钢砼结构Reinforced Concrete Structure钢砼结构与砌体结构Reinforces Structure and Monsary Structure 钢砼课程设计Reinforced Concrete Course Design钢砼设计Experiment of Reinforced Concrete Structure高层建筑基础Tall Building Foundation高层建筑基础设计Designing bases of High Rising Buildings高层建筑结构设计Designing Structures of High Rising Buildings 高等材料力学Advanced Material Mechanics高等代数Advanced Algebra高等发光分析Advanced Luminescence Analysis高等分析化学Advanced Analytical Chemistry高等工程力学Advanced Engineering Mechanics高等光学Advanced Optics高等环境微生物Advanced Environmental Microorganism高等教育管理Higher Education Management高等教育史History of Higher Education高等教育学Higher Education高等量子力学Advanced Quantum Mechanics高等生物化学Advanced Biochemistry高等数理方法Advanced Mathematical Method高等数学Advanced Mathematics高等数值分析Advanced Numeric Analysis高等土力学Advanced Soil Mechanics高等无机化学Advanced Inorganic Chemistry高等有机化学Advanced Organic Chemistry高电压测试技术High-V oltage Test Technology高电压技术High-V oltage Technology高电压技术与设备High-V oltage Technology and Device高电压绝缘High-V oltage Insulation高电压实验High-V oltage Experiment高分子材料High Polymer Material高分子材料及加工High Polymer Material & Porcessing高分子化学High Polymer Chemistry高分子化学实验High Polymer Chemistry Experiment高分子化学与物理Polymeric Chemistry and Physics高分子物理High Polymer Physics高分子物理实验High Polymer Physics Experiment高级程序设计语言的设计与实现Advanced Programming Language's Design & Implementation高级管理信息系统Advanced Management Information Systems高级计算机体系结构Advanced Computer Architecture高级计算机网络Advanced Computer Networks高级计算机网络与集成技术Advanced Computer Networks and Integration Technology高级经济计量Advanced Economic Metrology高级软件工程Advanced Software Engineering高级生化技术Advanced Biochemical Technique高级生物化学Advanced Biochemistry高级食品化学Advanced Food Chemistry高级视听Advanced V ideos高级数据库Advanced Database高级数理逻辑Advanced Numerical Logic高级水生生物学Advanced Aquatic Biology高级英语听说Advanced English Listening & Speaking高级植物生理生化Advanced Plant Physiology and Biochemistry高能密束焊High Energy-Dense Beam Welding高频电路High-Frequency Circuit高频电子技术High-Frequency Electronic Technology高频电子线路High-Frequency Electronic Circuit高维代数簇Algebraic V arieties of Higher Dimension高压测量技术High-V oltage Measurement Technology高压测试技术High-V oltage Testing Technology高压电场的数值计算Numerical Calculation in High-V oltage Electronic Field高压电工程High-V oltage Engineering高压电技术High-V oltage Technology高压电器High-V oltage Electrical Appliances高压绝缘High-V oltage Insulation高压实验High-V oltage Experimentation高压实验设备测量High-V oltage Experimentation Equipment Measurement高压试验技术High-V oltage Experimentation Technology工厂电气设备Electric Equipment of Plants工厂供电Factory Electricity Supply工程材料的力学性能测试Mechanic Testing of Engineering Materials工程材料及热处理Engineering Material and Heat Treatment工程材料学Engineering Materials工程测量Engineering Surveying工程测量实习Engineering Measuring Practice工程测试技术Engineering Testing Technique工程测试实验Experiment on Engineering Testing工程测试信息Information of Engineering Testing工程测试与信号处理Engineering Testing & Signal Processing工程地质Engineering Geology工程动力学Engineering Dynamics工程概论Introduction to Engineering工程概预算Project Budget工程经济学Engineering Economics工程静力学Engineering Statics工程力学Engineering Mechanics工程热力学Engineering Thermodynamics工程数学Engineering Mathematics工程项目概预算Engineering Project Estimate & Budget工程项目评估Engineering Project Evaluation工程优化方法Engineering Optimization Method工程运动学Engineering Kinematics工程造价管理Engineering Cost Management工程制图Graphing of Engineering工业产品学Industrial Products工业电子学Industry Electronics工业分析Industrial Analysis工业锅炉Industrial Boiler工业会计学Industrial Accounting工业机器人Industrial Robot工业技术基础Basic Industrial Technology工业技术经济Industrial Technology Economics工业建筑设计原理Principles of Industrial Building Design工业经济理论Industrial Economic Theory工业经济学Industrial Economics工业美术设计Art Designing in Industry工业企业财务管理Industrial Enterprise Financial Management工业企业财务会计Accounting in Industrial Enterprises工业企业管理Industrial Enterprise Management工业企业经营管理Industrial Enterprise Administrative Management 工业社会学Industrial Sociology工业心理学Industrial Psychology工业窑炉Industrial Stoves工艺过程自动化Technics Process Automation工艺设计Technics Design工艺实习Technics Practice工艺原理与研究方法Principles & Research of Technics公差Common Difference公差测试实验Common Difference Testing Experiment公差技术测量Technical Measurement with Common Difference公差与配合Common Difference & Cooperation公共关系Public Relationship公共关系学Public Relations公司法Corporation Law公司组织与管理Organization and Management公司组织与管理Organization and Management of Corporate公文写作Document Writing功能材料原理与技术Principle and Technology of Functional Materials 功能高分子Functional Polymer功能性食品Function Foods古代汉语Ancient Chinese古典文学作品选读Selected Readings in Classical Literature骨科医学Osteopathic Medicine固体磁性理论Theory of Magnetism in Solid固体激光Solid State Laser固体激光器件Solid Laser Elements固体激光与电源Solid State Laser & Power Unit固体理论Solid State Theory固体物理Solid-State Physics故障诊断与容错技术Malfunction Diagnoses & Tolerance Technology关税Tariff管理概论Introduction to Management管理沟通Management Communication, Management Negotiation管理会计Managerial Accounting管理经济学Management Economics管理科学专题Management Science Special Subject管理数学Management Mathematics管理系统FOXBASE Management System of FOXBASE管理系统模拟Management System Simulation管理心理学Management Psychology管理信息系统Management Information System管理学Management Theory, Principles of Management管理学Principles of Management光波导理论Light Wave Guide Theory光电技术Photoelectric Technology光电检测与信号处理Optoelectronic Detection and Processing光电课程设计Photoelectric Course Exercise光电摄像技术Photoelectric Photographing Technique光电探测及信号处理Photoelectric Inspect & Signal Processing光电系统课程设计Photoelectric System Course Design光电信号处理Photoelectric Signal Processing光电信号与系统分析Photoelectric Signal & Systematic Analysis光电信息计算机处理Computer Processing in Photoelectric Information光电子技术Photoelectronic Technique光电子学与光电信息技术Optoelectronics and Optoelectronic Information Technology 光辐射探测技术Ray Radiation Detection Technology光接入网技术Technology of Light Access Network光谱Spectrum光谱分析Spectral Analysis光谱学Spectroscopy光纤传感Fibre Optical Sensors光纤传感器Fibre Optical Sensors光纤传感器基础Fundamentals of Fibre Optical Sensors光纤传感器及应用Fibre Optical Sensors & Applications光纤光学Fiber Optics光纤光学课程设计Course Design of Fibre Optical光纤技术实验Experiments in Fibre Optical Technology光纤实验Experiments in Fibre Optical光纤通信基础Basis of Fibre Optical Communication光纤通信技术Fibre Optical Communication Technology光纤通信网络Networks of Fiber Communications光纤通信系统Fibre Optical Communication System, System of Fiber Communications。

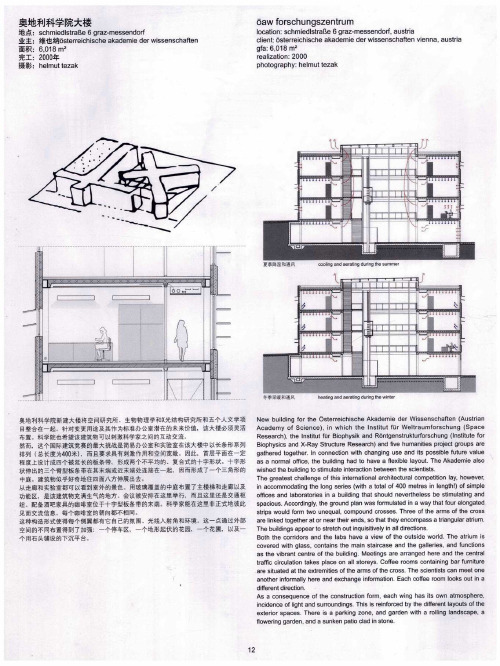
When it comes to architecture,there are countless styles and structures that can captivate the heart and mind.My favorite type of architecture is one that seamlessly blends aesthetics with functionality,creating spaces that are not only visually appealing but also serve a purpose in the community.Historical Significance and Cultural HeritageOne of the most enchanting aspects of architecture is its ability to reflect the history and culture of a place.Buildings like the Eiffel Tower in Paris or the Taj Mahal in India are not just architectural marvels they are symbols of a nations heritage and pride.These structures have stood the test of time,telling stories of the past and inspiring the present.Innovation and Modern DesignIn contrast to historical structures,modern architecture often pushes the boundaries of what is possible with new materials and technologies.Buildings like the Burj Khalifa in Dubai or the Guggenheim Museum in Bilbao showcase the ingenuity of contemporary architects.These structures are not only functional but also serve as artistic expressions that challenge our perceptions of space and form.Sustainability and EcoFriendly PracticesAs the world becomes more aware of environmental issues,sustainable architecture is gaining popularity.I admire buildings that incorporate ecofriendly practices,such as the use of solar panels,green roofs,and rainwater harvesting systems.These structures not only reduce their environmental footprint but also promote a healthier living environment for their occupants.Community Spaces and Public BuildingsArchitecture that serves the community is particularly appealing to me.Public libraries, community centers,and parks are examples of spaces that bring people together and foster a sense of belonging.These buildings are designed to be inclusive,accessible,and welcoming to all members of the community.Personal Connection and Emotional ImpactOn a personal level,architecture can evoke emotions and create lasting memories.A childhood home,a university campus,or even a favorite coffee shop can hold a special place in ones heart.These spaces become a part of our identity and contribute to oursense of belonging.ConclusionIn essence,my favorite architecture is a harmonious blend of history,innovation, sustainability,community service,and personal connection.It is the kind of architecture that not only stands out for its beauty but also for its ability to enrich the lives of those who interact with it.Whether its a historic monument or a modern skyscraper,the best architecture leaves a lasting impression and contributes positively to the world around it.。
Feb 2007IPU 40124The IRI 4040 is an innovative thermal imager product, which offers outstanding imaging and temperature measurement performance together with the traditional IRISYS features of flexibility, ease of use, and minimal cost of ownership.IRISYS has produced an imager that is ideal for the thermographer and maintenance engineer alike; high quality images may be captured and manipulated offline or problems can be resolved on the spot. The camera comes with an industry leading 3 ½" display and delivers price and performance that are unique to IRISYS.The narrow angle 9.1° x 6.8° lens enables detection and temperature measurement of small objects over long distances. The IRI 4040 is especially suitable for use in the power utilities industries for the inspection of substation and overhead distribution and transmission lines.IRI 4040Long Range Thermal ImageraThe IRI 4040 Long RangeThermal ImagerInnovativeThermalImagingProduct DescriptionThe ergonomically designed imager houses the complete uncooled microbolometer-based camera core together with a long life Li-ion battery pack. For ease of use the image is displayed on a large 3½" colour LCD with LED backlight. Images can be captured using an MMC or SD card for recall and further analysis if required. Images can also be downloaded to a PC from the memory card for analysis, report generation and printing.OperationDesigned for self-contained use, the camera is the ideal tool for all maintenance engineers. The high capacity, field replaceable, rechargeable Li-ion battery allows continuous operation for a full working shift. The IRI 4040 is fully radiometric; temperature measurements can be made over the entire image, and hot spots can be identified by use of a trigger activated laser pointer.© 2007 InfraRed Integrated Systems Limited (IRISYS). No part of this publication may be reproduced without prior permission in writing from InfraRed Integrated Systems Limited. This document gives only a general description of the product and except where expressly provided otherwise shall form no part of any contract. IRISYS have a policy of continuous product improvement and reserve the right to change the specification of the products and descriptions in this data sheet. Prior to ordering products please check with IRISYS for current specification details.SPECIFICATIONPERFORMANCEField of view (FOV): 9.1o x 6.8o Focus: ManualMinimum Focus: 50cm (120cm for radiometry) Spectral Response: 8µm to 14µmThermal Sensitivity: 150mK (0.15°C) @21°C ambient and25°C scene temperatureImaging Range -10°C to 250°C Detector: 160x120 pixels uncooled microbolometerIMAGE STORAGENumber: Up to 1000 images on SD card supplied Medium: MMC/SD cardDISPLAY3½" colour LCD with LED backlight 4 colour palettesLASER POINTERA built in Class 2 laser is supplied to highlight the central measurement areaMEASUREMENTTemperature range: 0°C to +250°CRadiometry: Two movable temperature measurement cursors Temperature difference measurement Emissivity Correction:User selectable 0.2 to 1.0 in steps of 0.01 with reflected ambient temperature compensationAccuracy: The greater of +2o C or 2% of reading in o C.IMAGER POWER SUPPLYBattery: Lithium-ion field rechargeable, replaceable batteriesOperation time: Up to 6 hours continuous operation AC operation: AC adaptor suppliedMECHANICALHousing: Impact Resistant Plastic Dimensions: 230mm x 120mm x 135mmWeight: Less than 0.8kg including battery Mounting: Handheld & Tripod mountingIRI 4040 INCLUDESIR Camera, Battery, AC adaptor, USB Cable, usermanual and software CD, carrying case, wrist strap, SD card and SD card reader, light shade .OPTIONAL ACCESSORIESR eport writing software; desktop charger; 12V car charger; additional battery.INTERFACESUSB type BSETTINGS AND CONTROLS• On/Off soft power control • User selectable span control • User selectable level control • Auto adjust span and level• Display palettes: rainbow, ironbow, high contrast and greyscale• Laser trigger switch • Readout in °C, °F or K• Image capture, time and date • 2 x digital zoomFEATURES• Real time image and temperature measurement display• Crisp high resolution images • Large 3 ½ inch display • Simple operation• Multiple temperature measurement• Multiple image storage and retrieval at full digital resolution• Image browser with full image adjustment • Battery Charge indicator • LightweightUse, duplication or disclosure of data contained on this sheet is subject to the restrictions on the title page of this document. Whilst IRISYS endeavour to ensure that all descriptions, weights, temperatures, dimensions, and other statistics contained in this product information are correct, they are intended to give a general idea of the product only and IRISYS do not warrant their accuracy or accept liability for any reliance on them. This product may be protected by patents RE36136, RE36706, US4752694, US5286976, US5300915, US5420419, US5895233 and US5637871. All brands and product names are acknowledged and may be trademarks or registered trademarks of their respective holders.aInnovativeThermal ImagingInfraRed Integrated Systems Ltd, Park Circle, Tithe Barn WaySwan Valley, Northampton, NN4 9BG, UK Telephone: +44 (0) 1604 594200 Fax: +44 (0) 1604 594210 e-mail: ***************.uk web site: IRI 4040。
Stereo for Image-Based Rendering using Image Over-Segmentationwrence Zitnick(larryz@)and Sing Bing Kang(sbkang@) Microsoft ResearchOne Microsoft WayRedmond,WA98052Special issue of IJCVAbstract.In this paper,we propose a stereo method specifically designed for image-based rendering.For effective image-based rendering, the interpolated views need only be visually plausible.The implication is that the extracted depths do not need to correct,as long as the recovered views appear to be correct.Our stereo algorithm relies on over-segmenting the source puting match values over entire segments rather than single pixels provides robustness to noise and intensity bias.Color-based segmentation also helps to more precisely delineate object boundaries,which is important for reducing boundary artifacts in synthesized views.The depths of the segments for each image are computed using loopy belief propagation within a Markov Random Field framework. Neighboring MRFs are used for occlusion reasoning and ensuring that neighboring depth maps are consistent.We tested our stereo algorithm on several stereo pairs from the Middlebury data set,and show rendering results based on two of these data sets.We also show results for video-based rendering.Keywords:stereo correspondence,multi-view stereo,segmentation,image-based rendering.1.IntroductionStereo is a fundamental problem in computer vision that requires establishing correspondences between multiple images.It is used in a host of applications such as creation of3D models,robot navigation,parts inspection,and image-based rendering.We are interested in developing a robust stereo technique for image-based rendering(IBR),i.e.,we wish to enable photorealistic view interpolation of scenes.There are many issues that make stereo an unresolved problem.One set of issues is related to the property of the scene itself,namely textureless areas(making stereo ill-posed),non-Lambertian surfaces,reflections and translucency,and occlusions.The other issues are camera-related,such as image noise and errors due to imperfect calibration.The use of multiple cameras introduces another set of problems:differences inc 2006Kluwer Academic Publishers.Printed in the Netherlands.2exposure,white balancing,and other radiometric properties.Stereo algorithms should also be reliable and efficient for them to be practical.Stereo algorithms consist of three fundamental elements,namely the representation,the objective func-tion,and the optimization technique.The representation refers to how the images are used to decide depth or disparity:independent pixels,voxels,rectangular local windows,1D features(lines,contours),or segments (fine to coarse).The objective function specifies the weighting of the datafit term relative to the regular-ization term,and indicates how occlusion is handled(if at all).Finally,optimizing the objective function can take various forms,such as winner-take-all,dynamic programming(Ohta and Kanade,1985),relaxation labeling(Li et al.,1997),quadratic programming(Torr,2002),graph cuts(Boykov et al.,2001),and belief propagation(Sun et al.,2003).Since our goal is the photorealistic rendering of novel views,the extracted depth need not be correct,but plausible.This is consistent with the notion of using prediction error as the quality metric(Szeliski,1999). In other words,our goal is achieved as long as the interpolated views using the extracted depth distributions look physically correct.This is in contrast with the default measure of success being the minimization of deviation from actual depth or disparity.We assume Lambertian scenes,but we handle issues related to noise and slightly differing radiometric properties in the multiple source cameras.We aim for reliability and efficiency—we believe we have achieved a good trade-off by over-segmenting the image and approximating the scene depth with piecewise step functions.Our design decisions were made using valuable insights gathered from past approaches described in Sections2.A brief outline of the paper is as follows:In section2,we describe prior work in stereo and image-based rendering.Section3discusses the use of over-segmentation in stereo.An overview of the algorithm as well as our segmentation technique is described in Section4.The stereo algorithm is covered in Section2.1. Finally,results are shown in Section6,followed by a discussion and conclusion.2.Prior WorkIn this section,wefirst review stereo techniques and highlight representative examples.We then discuss issues associated with IBR systems,in particular camera setups and scene representations.3 2.1.S TEREO T ECHNIQUESAs mentioned earlier,stereo techniques can be categorized based on the representation used in the estimating scene depth:individual pixels,voxels,lines or contours,windows,and segments.For a comprehensive survey on two-frame stereo techniques,see(Scharstein and Szeliski,2002).2.1.1.Pixel-based TechniquesPixel-based techniques typically operate in disparity space(Intille and Bobick,1994),where non-reference source images are stabilized with respect to the reference image and match errors are aggregated.A pop-ular technique for enumerating errors is that of plane sweep(Collins,1996).A representative pixel-based technique is Zitnick and Kanade’s cooperative algorithm(2000),which votes in disparity space using the properties of uniqueness,continuity through local support,and occlusion through local inhibition.Other techniques include a diffusion technique to extract pixels with opacity(Szeliski and Golland,1999),graph cut(Boykov et al.,2001),and belief propagation(Sun et al.,2003;Sun et al.,2005).2.1.2.Voxel-based TechniquesRather than operating in disparity space,these techniques establish occupancy explicitly in3D space through voxels.To reduce the memory requirement,the spatial resolution of voxels is often limited.As a result,the footprint of each voxel typically spans multiple pixels in the source images.The primary idea of voxel-based techniques is to have pixels from the source images voting for the occupancy of voxels.Representative approaches include the original voxel coloring work(Seitz and Dyer,1997),recovery of voxels with opac-ity(De Bonet and Viola,1999;Reche et al.,2004),and treatment of voxels in a probabilistic framework (Broadhurst et al.,2001).2.1.3.Line or Contour-based TechniquesMany early approaches for stereo involve computing correspondences across features such as edges,lines, and contours.Stereo on edges has been accomplished through dynamic programming(Ohta and Kanade, 1985)and through plane sweep(Collins,1996).Other techniques perform line matching using epipolar geometry and gray level information(Schmid and Zisserman,1997),and contour matching using epipolar4geometry(Han and Park,2000).While this is useful as a preprocessing step for generating polygonal3D models,the output of such techniques is sparse correspondence.2.1.4.Window-based TechniquesWindow-based techniques are very popular as a simple means for increasing robustness.Local windows are used to support the depth hypothesis for the pixel of interest,usually with the assumption that neighboring pixels have similar depths.They range from beingfixed(Okutomi and Kanade,1993)and adaptive(Kanade and Okutomi,1994)to shiftable(Okutomi et al.,2002)and with view selection(Kang et al.,2001).2.1.5.Segment-based TechniquesUsing the reasonable assumption that neighboring pixels with similar colors have similar or continuous depths,researchers have used image segments to simplify the stereo problem.This has three important effects.First,it reduces the ambiguity associated with textureless regions.The side effect of the assumption is that depth discontinuities tend to occur at color boundaries.Second,by dealing with much larger segments, the computational complexity is reduced.Finally,noise tolerance is enhanced by aggregating over like-colored pixels.Many techniques have been proposed to break up the image into segments and operating on these seg-ments.One such early technique makes the assumption that the transform across views is piecewise affine (Wang and Adelson,1994).Baker et al.(1998)use manually segmented regions to compute the plane equa-tions,followed by plane plus parallax tofind local depth distributions.More recent work directly relies on color segmentation(Tao et al.,2001),and over-segmented regions(Zitnick et al.,2004).The specific notion of over-segmentation for stereo is further explored in Section3.We now briefly review issues associated with IBR systems.2.2.I MAGE-B ASED R ENDERING S YSTEMSImage-based rendering(IBR)(Kang,1999;Shum et al.,2006)refers to techniques that rely primarily on the source images to produce new virtual views.IBR range from using dense sets of images with no geometry (Levoy and Hanrahan,1996)or some rough geometry(Gortler et al.,1996)to sparse source images with5 high-quality geometry(layered depth images with multiple depths per pixel(Shade et al.,1998)and view-dependent textures(Debevec et al.,1996)).There are a variety of design decisions made for image-based rendering systems.There are differences in system setup and camera configuration,types of data extracted,scene representation,and rendering algorithm.The rendering algorithm used is intimately tied to the representation used,which also affects the rendering speed.The prior approaches provide us with valuable lessons on what works well and what works less effectively,given the goal of photorealistic(that is,artifact-free)scene rendering.2.2.1.Camera setupThe camera setups range from dense configuration(Stanford Light Field Camera(Wilburn et al.,2005)) to intermediate camera spacing(Zitnick et al.,2004)to wide camera distribution(Virtualized Reality TM (Kanade et al.,1997)).Currently,only the Virtualized Reality TM camera setup allows a nearly complete 360degree range of virtual pan and tilt.However,the wider spacing between the cameras in this system provide more of a challenge in producing locally consistent geometries and hence photorealistic views.This is because occlusions become more of an issue and the non-rigid effects associated with non-Lambertian surface properties(specularities)are much more difficult to deal with.A significantly denser camera configuration such as that of the Stanford Light Field Camera allows effects such as synthetic aperture and focusing(Isaksen et al.,2000).Note that synthetic aperture imagery allows objects that are occluded with respect to any given camera to be seen.As demonstrated by the Light Field-related approaches for static scenes(Gortler et al.,1996;Levoy and Hanrahan,1996),dense sampling permits photorealistic rendering with just either a simple planar geometric representation or a rough geometric approximation.However,the disadvantage is the large number of images required for rendering.This issue of the image-geometry trade-off was discussed in(Kang et al.,2000).The work of Zitnick et al.(2004)attempts to reduce the required number of input cameras and compensate for this by providing high-quality stereo data.Resolution obviously plays an important role in achieving photorealism,but having a higher resolution will not help if rendering artifacts are not properly handled.These artifacts include boundary or cut-out effects,incorrect or blurred texturing,missing data,andflickering.Boundary or cut-out effects are caused by mixed foreground and background colors in object boundary pixels.Incorrect or blurred texturing can be caused by incorrect stereo extraction,occlusion,and non-rigid effects,whileflickering sometimes occurs6if temporal consistency is not accounted for.Unfortunately,humans are highly sensitive to high-frequency spatial and temporal artifacts.Although using a reduced resolution would conveniently help to mask or ameliorate such artifacts,it should not be viewed as a solution or an excuse.2.2.2.Scene representationThe choice of scene representation is critical to the goal of photorealism.Since surfaces of a real scene tend to be non-Lambertian,using a single extracted3D geometry to represent the scene is not recommended. An exception may be if the scene is highly structured as in the Fac¸ade work on modeling and rendering buildings(Debevec et al.,1996).In such a case,view-dependent texturing on a single geometry may be adequate.However,in general,we think the best choice would be to use view-dependent geometries.This has been demonstrated in a number of approaches,such as(Pulli et al.,1997;Debevec et al.,1998;Heigl et al.,1999),with considerable success.As Zitnick et al.(2004)have demonstrated,using view-dependent geometries as well as extracting the matting(alpha)information at the boundaries and using it for rendering have proven to be highly effective. Boundaries need to be handled correctly in order to avoid artifacts(blurring and/or cut-out effects),and using matting information has been shown to be effective.The difficulty is in avoiding the manual process of indicating the matting areas for subsequent matte extraction.The manual component is required in prior matte extraction techniques.Zitnick et e depth discontinuities to automatically indicate areas where foreground and background pixel colors exist,and apply an existing technique for matte extraction(Chuang et al.,2001;Wexler et al.,2002).A more systematic technique for simultaneously extracting matte infor-mation and refining depths at discontinuities uses3D deformable contours as unifying structures(Hasinoff et al.,2004).The spatial-temporal view interpolation technique of Vedula et al.(2005)is an appropriate approach to ensure temporal continuity and thus avoidflickering during rendering.Interestingly,Zitnick et al.showed that it is possible to produceflicker-free rendering without considering the time domain if the stereo data extracted is accurate enough(from the photoconsistency point of view).However,this feat will be difficult to replicate for general scenes with significant non-rigid effects such as specularities and translucencies.7Small segments Large segmentsSSD Standard color segmentation stereo Panorama stitchingOver-segmentation stereo Figure 1.Diagram of various image matching approaches with respect to size of pixel groupings used for correspondence.3.Image Over-SegmentationAs mentioned in Section 2.1.5,segmentation methods have been proposed for stereo (Wang and Adelson,1994;Baker et al.,1998;Tao et al.,2001;Zitnick et al.,2004).If we view segmentation methods based on how coarse images are segmented,we arrive at the continuum shown in Figure 1.At one end,pixel-wise matching algorithms such as SSD (sum of square differences)can be viewed as using each individual pixel as a segment.At the other end,algorithms that align entire images using global motion models,such as for panorama stitching,can be viewed as treating each entire image as one large segment.Standard color segmentation approaches (Tao et al.,2001;Bleyer and Gelautz,2004;Sun et al.,2005)lie between the two ends of the continuum.The effect of using larger segments is to increase the area of support,which usually improves the re-liability and accuracy of pixel ing segments,correct matches are possible even in the presence of noise,intensity bias,or slight deviations from the Lambertian assumption.The segment size needs to be at a trade-off point where the amount of information within a segment is sufficient for matching without compromising the characterization of the true disparity distribution.Segments that cover a complex disparity distribution or straddle more than two objects are often undesirable.If a segment is too small,it is difficult for it to unambiguously find the correct pixel correspondence.As a result,some mechanism for using information from neighboring segments is typically required to reduce the ambiguity.For single pixel correspondence,graph cuts (Boykov et al.,2001)or belief propagation (Sun et al.,2003)provides this mechanism.In (Tao et al.,2001),neighboring segments are used to help in finding correct correspondences in the vicinity of occlusions.The use of over-segmentation strikes a good balance between providing segments that contain enough in-formation for matching and reducing the risk of a segment spanning multiple objects.The over-segmentation approach occupies the space between single pixel matching and standard segmentation approaches,as shown8in Figure1.The use of over-segmentation also reduces the computational complexity of the algorithm, since disparities only need to be estimated per-segment rather than per-pixel.Given the smaller size of the segments,more information needs to be shared between segments tofind correct correspondences than other segmentation approaches.However,more confidence can be placed in simple matching functions than with single pixel approaches.4.Algorithm OverviewStereo vision is known to be a1D search problem.Given the reduced search space of stereo,it is possible to construct methods that compute and store an estimate for each pixel at each disparity.If we assume each segment has a constant disparity(i.e.,each segment is fronto-parallel with respect to some global viewpoint),the requirements become even less demanding.The disparity estimates only need to be stored for each segment rather than each pixel.As we will show,we can create a Markov Random Field(MRF) with the segments as nodes,and the disparity levels as states.The values at each node,called the disparity space image(DSI)(Intille and Bobick,1994),can then be updated using loopy belief propagation(Sun et al., 2003).Unlike most previous algorithms,we construct a DSI for each image.All of the images are treated equally,and no reference image is designated(Kolmogorov and Zabih,2002).Initially,a method for com-puting each disparity map independently is proposed using belief propagation,as opposed to the meanfield approach of Zitnick et al.(2004).We then discuss a method for iteratively sharing disparity information across images,while updating the segments’disparity beliefs.After convergence,the segment is assigned to the disparity with the maximum probability or belief.Before we discuss the exact formulation of the MRF,let usfirst describe our method for over-segmenting each image.9Figure2.Neighboring pixels groups used for averaging.(a)(b)(c)(d)Figure3.Segmentation procedure:(a)original image close-up,(b)smoothing image,(c)image broken into square grid and(d)the final segmentation.4.1.S TEREO S EGMENTATIONThe goal of segmentation is to split each image into regions that are likely to contain similar disparities.In creating these segments,we assume that areas of homogeneous color generally have smooth disparities,i.e., disparity discontinuities generally coincide with intensity edges.Since we would like to only construct an MRF and its properties once for each image,a rigid segmenta-tion is computed prior tofinding stereo information.Segmentation is done in a two-step process as shown in Figure3.Wefirst smooth the image using an anisotropic technique described in Zitnick et al.(2004).Next, unlike Zitnick et al.(2004),we cluster neighboring colors using a simple K-means technique.The purpose of smoothing prior to segmentation is to remove as much image noise as possible in order to create more consistent segments.We also want to reduce the number of thin segments along intensity edges, which may result from grouping mixed pixels.Our smoothing algorithm iteratively averages(8times)a pixel with three contiguous neighbors as shown in Figure2.The set of pixels used for averaging is determined by which pixels have the minimum absolute difference in color from the center pixel.This simplified variant10of the well known anisotropic diffusion and bilateralfiltering algorithms produces good results for our application(Perona and Malik,1990;Tomasi and Manduchi,1998).After smoothing,the image is partitioned into a grid of equally sized segments(8×8),as shown in Figure 3(c).The shape and size of each segment are then refined using an iterative K-means algorithm(Figure3(d)). Each segment s j is modeled as a Gaussian in color space with meanµj and covariance matrixΣj.Similarly, the spatial extent of the segment is modeled with a Gaussian with meanηj and covariance matrix∆j.During each K-means iterationµj,ηj,and∆j are updated.To ensure that segments consist of pixels with roughly constant color,Σj is heldfixed to some scalar multiple of the image noiseΣI:Σj=aΣI(1)The value of a is typically greater than one,so that the spatial extent of the segment has a slightly greater influence over a pixel’s membership in the segment.As a result,segments maintain an approximate elliptical shape(Figure3(d)).During the K-means process,if a segment becomes too small(less than10pixels)it is removed from consideration.5.StereoStereo vision assumes two or more images were taken of a static scene,and that the camera parameters, both intrinsic and extrinsic,are known.Given the calibration data,it can be shown that corresponding pixels between cameras lie along the epipolar line.The reduced search space from2D to1D allows many approaches for stereo vision to be tractable.In a standard stereo vision examples,such as those in the Middlebury data set,only between20to50disparity levels need to be considered along the epipolar line. Graph-cuts and belief propagation both iteratively compute values for every disparity value at each pixel.More specifically,belief propagation creates an MRF using the pixels as nodes,and edges between all4-connected neighbors.The probabilities or beliefs for each disparity at each pixel are then iteratively computed using the loopy belief propagation algorithm.We take a similar approach,except we construct an MRF using segments as nodes.An edge is constructed between two segments if their boundaries touch each other.Thus,the number of neighbors for each node will vary.However,we still formulate our model as a pairwise MRF.Figure4.Triangulation of segments used for the MRF.Sun et al.(2005)modeled stereo using three coupled MRFs,with each modeling disparity,discontinu-ities,and occlusion.We adopt a different approach and use a single MRF to model disparities.However, unlike(Sun et al.,2005)(which handles only two source images),we handle multiple images;we construct an MRF for each image and use their estimates to predict disparities in other images.5.1.S TEREO MRF SGiven our segmentation,we construct a pairwise MRF for each image using a triangulated graph as shown in Figure4.Each MRF,D i,for image I i has a node corresponding to each segment,s k∈S i,and an edge between all neighboring segments,s l for l∈n(k).Segments are considered neighbors if any two pixels within the segments are4-connected.The number of states for each node is equal to the number of disparity levels.Our goal is to compute the most probable disparities,D i,given our images I,P(D i|I).Using Bayes’rule we can rearrange our function to getP(D i|I)=P(I|D i)P(D i)P(I).(2)Given that P(I)isfixed for a set of images,we only need to maximize the numerator in equation(2).In the next two sections,we define our values of P(I|D i)and P(D i).5.1.1.Stereo LikelihoodAssuming i.i.d.(independent identical distribution)for the noise at each pixel location,the standard likeli-hood function for an MRF created from pixels locations isP(I|D i)∝j∈N(i)xF(x,d x,I j),(3)Bad match(a)(b)Figure 5.Histogram of segment intensity differences for a bad match (a)and good match (b).where N (i )is the set of neighboring images to I i .Typically,F (x,d x ,I j )is defined as a cost function between the images I i and I j ,at pixel x ∈I i for disparity d x within the range of possible ing the segmentation approach,our cost function is determined over segments and not pixels.Thus our likelihood function will take the following form:P (I |D i )∝ j ∈N (i ) k ∈S iG (s k ,d k ,I j ),(4)where G (s k ,d k ,I j )is the segment cost function with image I j at disparity d k .The segment cost function could use a variety of measures,including sum of square differences (SSD),normalized correlation,mutual information (Kim et al.,2003),etc.Depending on the color balancing across images,the amount of image noise,and the number of specularities,the measures will yield varying results.For applications involving image-based rendering of dynamic scenes,video cameras are used.Images captured from video cameras typically have a higher amount of noise and a wider variation in gain and intensity offsets.To handle these problems,we have developed a matching score computed in two steps.First,we find the greatest percentage of pixels within a segment that match over a range of possible offset differences.Second,given the number of matching pixels,we estimate the match probability.Our first step is to compute the greatest number of matching pixels within a segment over a range of offsets for each possible disparity.To do this,we first project each pixel in the segment onto the neighboring image and find the difference in color or intensity.Each difference is then added to a histogram with bins ranging from − to with the bin width being 1(see Figure 5(a)and (b)).In our experiments,we set =30,i.e.,we do not expect any images to have intensity differences greater than 30intensity levels.Next,the histogram is convolved with a Gaussian with a standard deviation equal to that of the image noise.Thus,each bin in the histogram will have a value equal to the number of matching pixels for a corresponding offset and given amount of image noise.The largest bin in the histogram,designated h ∗k (d ),is found for00.10.20.30.40.50.60.70.80.91Match Percentage # o f S e g m e n t sScaled Match Percentage# o f S e g m e n t s (a)(b)Figure 6.Plot of the number of segments with (a)a certain match percentage or (b)scaled match percentage at their correctdisparity.each segment k and disparity d .If the number of pixels in segment k is C k ,the percentage of matching pixels is h ∗k (d )/C k .If we examine the distribution of match percentages h ∗k (d )/C k for non-occluded segments at the correct disparities,we get the results in Figure 6(a).The two plots show the results using the ground truth disparities for the Teddy and Cones stereo pairs from the Middlebury stereo data set.The range of match percentages varies widely,depending on the amount of texture within the segment.Since the Teddy stereo pair has more areas of low texture,its match percentages are generally higher.Since the correct match percentage of each segment varies,we scale the maximum histogram values by each segment’s maximum over all possible disparities,i.e.,m k (d )=h ∗k (d )max d h ∗k (d ).(5)After scaling,we get the distribution for m k (d )shown in Figure 6(b),in which the values are clustered around 1.The result is a more reliable indicator of a correct match.To compute the final match probability,we approximate the functions shown in Figure 6(b)using a polynomial of the following formG (s k ,d k ,I j )∝m k (d )κ,(6)where κcan be set to any reasonable value which approximates Figure 6(b),and in our experiments κ=4.At this point,we assume our likelihood function is just a measure of image similarity.In Section 5.1.3,we describe how to extend this to include disparity information from MRFs in neighboring images.ThisColor Distance% S a m e S u r f a c e Figure 7.Plot of the percentage of neighboring segments with similar disparities (+/-1pixel)with respect to the difference in color between the segments for the Teddy and Cones stereo pairs.The average ground truth disparities for the segments were used.additional information allows us to handle occlusions,as well as ensures the disparity estimates computed for each image are consistent.5.1.2.Stereo PriorWe strictly enforce the color consistency constraint within segments by assigning all pixels the same dispar-ity.We extend this assumption across segments as well as pixels,that is,neighboring segments with similar color should have similar disparities.In Figure 7,we plotted the percentage of neighboring segments with similar disparities (±1pixel)with respect to the difference in color between the segments for the Teddy and Cones stereo pairs.We can see the segments with similar color are more likely to have similar depths.Unlike pixels in the same segment,we use a soft constraint between neighboring segments,enforced within our prior.This prior takes the form of the following potential function:P (D i )∝ k ∈S i l ∈n i (k )λkl N (d ik ;d il ,σ2s )+(1−λkl )U .(7)The function N (d ik ;d il ,σ2k,l )is a normal distribution with mean d il and variance σ2s,and U is the uniform distribution.The value of σ2sremains fixed and controls the expected amount of variation between similarly colored segments.A smaller value of σ2sbiases disparities towards fronto-parallel planes.In our experiments σ2s =2.5.The value of λklcontrols the amount of influence for each neighboring segment.The smaller a value for λkl ,the more uniform (7)becomes for a particular segment,which results in that segment exerting less influence.The value for λkl is computed based on the color similarity between segments:λkl =ξe − c k −c l 2/2σ2c + ,(8)。
普通相机受限于焦距与传感器,采集的图像有时无法满足人们对于高分辨率与宽视角的图像的需求,为了利用普通相机获得此类特定需求的图像,图像拼接技术应运而生。
图像拼接技术是指通过对输入的、具有重叠部分的图像序列进行图像预处理、图像配准、图像融合等操作,将其拼接成一幅具有高分辨率、宽视角图像的技术。
目前该技术广泛地应用在无人驾驶[1]、虚拟现实[2]、遥感图像处理[3]、医学成像[4]、视频编辑[5]等领域。
图像拼接算法通常可分为图像配准与图像融合两个步骤。
其中,图像配准是核心,也是解决视差问题的关键。
图像配准的难点在于如何构建一个更加精准、合适的模型,以减少配准误差且不破坏图像内容的结构。
根据相机的运动状况,图像配准算法主要可分为单视点配准算法和多视点配准算法两种。
图像视差产生于多视点情况下,具有视差的图像的配准是长期以来图像配准技术中的一个挑战,也是当前的研究热点。
近年来,针对视差图像配准的研究工作多数采用基于特征的空域变换方法。
根据生成变形模型的方式不同,可主要将其分为基于多平面对齐的图像配准、基于网格变形的图像配准以及缝合线驱动的图像配准三类。
本文对三类方法近年的一些相关工作进行了分析并讨论了其优缺点。
1视差问题概述与图像配准流程1.1视差形成原因视差是指从具有一定间隔的两个点上观察同一目标时产生的方向上的差异。
在拍摄时,如果相机的位置视差图像配准技术研究综述夏丹,周睿华中师范大学教育信息技术学院,武汉430079摘要:传统图像配准技术受限于严苛的初始输入已难以满足人们的需求,近年来,视差图像的配准逐渐成为图像拼接技术中的研究热点。
基于视差形成原理介绍了视差图像配准的难点与一般流程。
主要研究了基于特征的视差图像配准技术,对近年来视差图像配准的研究成果进行了归纳梳理,并从基于多平面对齐的图像配准、基于网格变形的图像配准以及缝合线驱动的图像配准三个方面进行阐述。
通过对各种典型的视差图像配准算法的算法思想、特点以及局限性进行描述和比较,提供该领域研究现状的系统综述,并对视差图像配准技术的研究趋势进行了展望。
IEEE TRANSACTIONS ON VERY LARGE SCALE INTEGRATION (VLSI) SYSTEMS, VOL. 15, NO. 9, SEPTEMBER 2007981A VLSI Architecture for Image Registration in Real TimeNisheeth Gupta, Member, IEEE, and Nikhil Gupta, Member, IEEEAbstract—Image registration is an ubiquitous task occurring in countless image analysis applications. A dedicated implementation of image registration algorithms is the best approach to meet the intensive computation requirements of implementing image registration schemes in real time. This paper presents an efcient VLSI architecture for real-time implementation of image registration algorithms using an exhaustive search method. Normalized cross correlation function, mean square error, and blue screen technique algorithms are implemented for image registration. The architecture is based on a data ow design that allows sequential inputs but performs parallel processing. Based on the architecture, a programmable chip can be designed for image registration. Chips can be cascaded to achieve better performance and sizes of both the search and the reference image which can vary with time from a small to a very large value. Index Terms—Blue screen technique, image registration, mean square error (MSE), normalized cross-correlation function (NCCF), tracking, VLSI architecture.TABLE I PERFORMANCE OF ALGORITHMS FOR DIFFERENT SNR RANGESI. INTRODUCTIONAPOWERFUL vision-based system for image registration is of growing interest in many digital image processing applications such as medical imaging, industrial imaging, robot vision, tracking an area of interest before detection, tracking point targets, and multitarget handling capability. Image registration requires precise location of the reference image within the search image. Until now, the usage of these algorithms has been strongly limited due to their very high computational requirements. In addition, real time and space constraints increase the performance requirements on the computing engine. Reliability and accuracy of normalized cross-correlation function (NCCF) have been described in [1] and [2]. In [3], the performance of NCCF and mean absolute difference (MAD) is measured, taking into account different system parameters such as signal-to-noise ratio (SNR), gain and offset variations, total search space, reference window size, etc. Simulations carried out in [4] show that performance of mean square error (MSE) is comparable with that of MAD. Table I is based on the study in [3] and [4]. No single image registration algorithm can work satisfactorily for all applications and in all environments. Therefore, in the proposed architecture NCCF, blue screen technique (BST),an extended version of NCCF and MSE, is implemented in order to serve different applications and different environments. MSE has been selected for implementation with NCCF, as both MSE , and NCCF can be computed with the same terms, i.e., , and as in (1), (2), and (3). NCCF, BST, or MSE can be used “as is,” to provide simple feature detection, or can be used as a component of a more sophisticated registration scheme that may address scale and rotation variance, feature updating, and other issues. This paper is organized as follows. In Section II, the algorithms implemented are discussed. The proposed VLSI architecture and its data ow are discussed in Section III. Section IV presents exibility in image size and tracking range. Performance analysis and comparison are carried out in Section V. Section VI concludes this paper. II. IMAGE REGISTRATION ALGORITHMS IMPLEMENTED The problem of locating a reference image within a larger is called image registration. Image registration can image and be depicted as shown in Fig. 1. Let the search image be of and pixels, the reference image respectively. Let be the subimage of starting . Each pixel takes one of gray levels: at , where , ; , where , ; is the search position in Search Frame. and the MSE are computed beThe NCCF as shown in (1) and (2). tween and For (1) (2) Here, indicatesManuscript received March 22, 2006; revised November 4, 2006. N. Gupta was with the Research Center Imarat (RCI), Hyderabad 500069, India. He is now with ST Microelectronics, Greater Noida, 201308, India (e-mail: nisheethg@; nisheeth@). N. Gupta is with the Computer Sciences Corporation (CSC), Char Imli, Bhopal (MP) 462016, India (e-mail: nikhil.gupta@). Digital Object Identier 10.1109/TVLSI.2007.902210(3) The similarity measure in (1) is normalized by energy content of the image portion that is covered at each step by the template. This considerably increases the reliability of the algorithm when1063-8210/$25.00 2007 IEEEAuthorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.982IEEE TRANSACTIONS ON VERY LARGE SCALE INTEGRATION (VLSI) SYSTEMS, VOL. 15, NO. 9, SEPTEMBER 2007Fig. 1. Image registration algorithm. Fig. 2. Algorithm decomposition.used in presence of nonuniform illumination. If cross-correlation is not normalized, the correlation function may give erroneous results. These errors may occur when some parts of the search image have higher gray levels compared to that part of the search image containing the reference image. In such a situation, the unnormalized correlation function can give a false peak even when the actual reference is present in the search image without any distortion or noise [32]. Location of image registration is is maximum or either the location where the value of the location where the value of is minimum. lies between 0 and 1 and is 1 for a perfect match. An extended version of the NCCF-blue screen technique (BST) algorithm (4), derived from [5]–[7], allows detection of arbitrarily shaped templates. It considers only relevant pixels when computing the normalizing term (denominator) (4)if ifis a relevant pixel is a background pixel.Algorithms are implemented in spatial domain in the presented architecture. III. ARCHITECTURE AND ITS DATA FLOW In the proposed architecture, rc and rr loops (lines 3 and 4 in Fig. 2) are performed in parallel, and therefore, it is necessary window processors (WP) for a reference block of to have pixels. The data ow of the proposed architecture is based on [8], but with a higher number of WPs. Novelties of the proposed architecture are as follows: size of the search and the reference image can vary with time from a small to a very large value; search range can vary from a small to a very large value; cascaded chip conguration is not needed for increasing the search range, but only for faster performance for reference image of sizes above 16 16 pixels. Fig. 3 shows the proposed systolic architecture and Table II shows the data ow for reference image of 16 16 pixels.Fig. 3. Architecture.In Table II, Ref denotes a sequence of reference image data. S1 and S2 denote sequences of the search frame data. Sequences Ref, S1, and S2 are input according to the time cycle indicated in the rst column. The 256 WP columns represent calculations of the coefcient measurement for 256 search positions. The proposed architecture allows sequential input of and , but performs parallel processing. Address and control signal generation unit (ACSGU) generates the address of the S1 and S2 sequences by summing up a and a running index . Both sequences base address have separate base address and running index counter.Authorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.GUPTA AND GUPTA: VLSI ARCHITECTURE FOR IMAGE REGISTRATION IN REAL TIME983TABLE II DATA FLOW FOR REFERENCE IMAGE OF 162 16 PIXELSInitially, the base address is (0,0) for both the sequences. The when either running index is reset and becomes changes from to or when and . The ACSGU also generates the address for the Ref sequence and the signals for various blocks in the architecture. Data sequence Ref of the reference image is fed through a common bus. WPs delay the reference data by one cycle before passing it to the next WP. Therefore, the reference data available to a WP during one cycle is available to the next WP in the next cycle. The Ref sequence is restarted when either all of the reference images are read into the array of WPs or when the and ) is reached in the running condition ( index of either sequence S1 or sequence S2. When the running and index of either sequence S1 or S2 reaches , data sequences S1 and S2 are broadcast through the two common buses, and one of the two buses is selected by each WP using a 2-to-1 multiplexer. All WPs have the same architecture. Each WP has subblocks as shown in Fig. 4. It has two MACs, one 18-bit 2-to-1 mul-tiplexer, and registers. Each MAC accumulates 18 18 multiplication over 44 bits. The selection signal of multiplexer and enable signal of WP#0 are generated by ACSGU. These control signals are delayed by one cycle before being applied to the next WP. Other operations performed in a WP are as follows: selection between S1 and S2 bus; and MAC in parallel computation of as per the control signals. When the Ref sequence repeats, the read out logic unit and outputs (ROLU) starts reading both of WPs 0 to 255 in a serial fashion, and passes this data along with the corresponding coefcient address to the data xer unit (DFU). Taking into account the accumulator overow, the DFU takes the difference of the current and the correand outputs, sponding previous value of respectively. Fig. 5 explains the working of DFU. DFU has two memory locations in “Read before write” RAM for each , and WP, one memory location for each data, respectively. Initial content of the DFU RAM is zero. TheAuthorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.984IEEE TRANSACTIONS ON VERY LARGE SCALE INTEGRATION (VLSI) SYSTEMS, VOL. 15, NO. 9, SEPTEMBER 2007Fig. 4. Basic diagram of the WP., and are available to WP#0. and are performed in is latched in Reg of WP#0 and will be used WP#0. in WP#1 during the next cycle. and are available to WP#0 and At cycle 1, is selected by both the WPs. WP#1, respectively. and are performed and accumulated in WP#0. and are performed in WP#1. is latched in WP#0 is latched in WP#1. and and for different Each WP calculates search positions. As all WPs will compute in parallel all the and time after the initial 256 cycles, both computations can be performed simultaneously for 256 search locations in parallel. is available to WP# At cycle 255, for and . As all WPs , the value of select and are calculated simultaneously in WP# for and . At the end of the 255th cycle, MAC RS and SS of WP#0 have (5) and (6), respectively At cycle 0,(5) (6)Fig. 5. DFU.boundary control unit (BCU) allows only legal WP location and data to enter and the corresponding the coefcient calculator unit (CCU). The CCU calculates coefcient as per the selected algorithm for evaluating the best match. As shown in (3), the MSE coefcient can be computed , , and . is calculated from only once, as it is the same for all superposition locations of the reference block on the search frame, and is directly available to the CCU. When NCCF is selected as the criterion for evaluating the best match, the comparator unit (CU) compares the current NCCF value with the previous one and saves the larger NCCF value with the corresponding address. CU functionality is similar for BST. When the MSE is selected as the criterion for evaluating the best match, the CU compares current MSE value with the previous one and saves the smaller MSE value with the corresponding address. MAC control For NCCF and MSE algorithms, signal is enabled for all reference image pixels, while for BST it is controlled by binarized copy of the reference image . In BST coefcient will be computed only for those pixels of with value one. and Ref sequences are the same. The ow of Referring to the data ow in Table II, a detailed description of the architecture’s data ow is discussed in the following for a reference image of 16 16 pixels and control signal of MAC enabled for all pixels of the reference image.By the 255th cycle, all pixels of the reference block are input to the array of 256 WPs. From the 256th cycle onwards, both the ROLU and the DFU start functioning and the Ref sequence restarts. ROLU sends and output of WP#0, i.e., (5) and (6) along with the address (0,0) to the DFU. DFU saves and into the RAM, and sends the corrected data along with the address (0,0) to the BCU. ROLU and DFU carry out the same procedure for the remaining WPs. is available to WP# At cycle 256, , where , , and , . is available to WP#0. is selected is selected by rest of the WPs. by WP#0 and and are performed and accumulated in WP#0. and are performed and accumulated , where , , in WP# and , . It should be noted that WP#0 is not reset and continues to do MAC operation over previous accumulation. Overow of MAC is taken care of in the DFU. and as At the end of the 511th cycle, WP#0 has shown in (7) and (8) in its two MACs, respectively(7) (8)Authorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.GUPTA AND GUPTA: VLSI ARCHITECTURE FOR IMAGE REGISTRATION IN REAL TIME985TABLE III DISTRIBUTION OF COEFFICIENT LOCATIONS HANDLED BY THE 256 WP FOR REFERENCE IMAGE OF 16 16 PIXELS2TABLE IV DISTRIBUTION OF LOCATIONS HANDLED BY WPS IN 4 ROUNDS/CHIPS FOR REFERENCE IMAGE OF 32 32 PIXELS2Functioning of the Ref sequence, the ROLU, and the DFU will restart from the 512th cycle because by the 511th cycle all pixels of the reference block are read into the Ref sequence. and output of WP#0, i.e., ROLU sends both (7) and (8) along with the address (0,16) to the DFU. DFU saves and into the RAM, and sends the corrected data both (9) and (10) along with the address (0,16) to the BCU (9) (10) The data ow schedule and calculations continue until the WPs complete computation of all possible search locations. Table III shows that for a particular coefcient location which of the 256 WPs does the computation. As shown in Table III, and for coefcient located WP#0 computes at (0,0), while WP#1 computes for coefcient located at (1,0). IV. FLEXIBLE IMAGE SIZES AND TRACKING RANGE The proposed architecture searches the reference image over and the complete search image. For a search image of pixels, the tracking range is complete reference image of search locations. A chip with the proposed architecture will give the best performance for a reference image of 16 16 pixels or smaller as the architecture has only 256 WPs. The chip will require cycles to nd the best match in a search image of pixels. Smaller search and reference images can be used by aligning them to the top left-hand corner of its maximum image size and by updating the values in ACSGU. For smaller images, the computation is not carried out for unused pixels. Reference image sizes larger than 16 16 pixels can be handled by using either a single chip or a cascaded chip conguration. When the number of WPs in a single chip or all cas, the conguration will take caded chips is less than more than one round of cycles to nd the best match. In any round , the sequences S1 and S2 repeat as shown in Table II, but the Ref sequence and WPs are disabled for the rst No. of cascaded chips Chip No. cycles in order to make the 256 WPs of each chip start at the right location. To generate proper control signals, the ACSGU must be fed with data about the number of cascaded chips. Consider a search and a reference image of 128 128 and 32 32 pixels, respectively. Table IV shows the distribution of locations handled by WPs in four rounds/chips. Table V shows the data ow of WP#0 and WP#1, respectively, for a single chip conguration or a cascaded chip conguration. In the single chip conguration, the computation for locations (0,0), (0,8), (0,16), and (0,24) is done by WP#0 in round1, round2, round3, and round4, respectively. While in the cascaded conguration of four chips, WP#0 of chip1 does the computation for location (0,0); WP#0 of chip2 does the computation for location (0,8); WP#0 of chip3 does the computation for location (0,16); and WP#0 of chip4 does the computation for location (0,24). In the cascaded conguration of four chips, with 256 WPs in each of the four chips, i.e., 1024 WPs computing in parallel, the time taken to nd the best match would be one-fourth the time taken by a single chip conguration. Thus, the cascaded chip conguration can be used to speed up the process of locating the best match rather than for increasing the tracking range. Cost of the system will increase as more numbers of chips will be needed in the cascaded conguration. The proposed architecture can support the search and the reference image of 512 512 and 64 64 pixels, respectively. While the architecture is running, size of both the search and the reference image can be changed at any time within their limits. V. PERFORMANCE ANALYSIS AND COMPARISON As different image registration schemes may use different image sizes and thus may require varying tracking ranges, the proposed architecture has been designed to offer exibility in size of both the search and the reference image. Behavioral simulation, post synthesis simulation, post MAP simulation, andAuthorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.986IEEE TRANSACTIONS ON VERY LARGE SCALE INTEGRATION (VLSI) SYSTEMS, VOL. 15, NO. 9, SEPTEMBER 2007TABLE V DATA FLOW FOR A REFERENCE IMAGE OF 322 32 PIXELSpost placement and routing (PAR) simulation were done successfully for the proposed architecture. In Table VI, the main features of the implemented architecture are shown. is a fractional number are handled by Cases in which , the rounding the result to the next higher integer. For architecture gives the best performance. For , i.e., when the total number of WPs in all of the cascaded chips is less than , cycles are required to nd the best match. The search time is marginally greater than cycles (as shownTABLE VI CHARACTERISTICS OF THE IMPLEMENTED ARCHITECTUREAuthorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.GUPTA AND GUPTA: VLSI ARCHITECTURE FOR IMAGE REGISTRATION IN REAL TIME987TABLE VII COMPARISON OF NCCF ALGORITHM PERFORMANCE ON INTEL PENTIUM-4 3-GHZ CPU AND THAT ON PROPOSED ARCHITECTURE. THE TABLE GIVES THE EXECUTION TIME IN MILLISECONDS (ms)TABLE IX COMPARISON OF THE PROPOSED ARCHITECTURE WITH OTHER ARCHITECTURESTABLE VIII COMPARISON OF THE PROPOSED ARCHITECTURE AND THE CELL PROCESSOR IN TERMS OF GFLOPS/GHzin Table VI) because extra cycles are necessary to handle the pipelined architecture. The proposed architecture is scalable. Limited on-chip reand to 64 and 512, sources have restricted the value of respectively. Each WP needs two MAC blocks. The number of WPs is limited to 256 as Virtex4SX55 has only 512 18 18 MAC (DSP slices). In a scaled up architecture with more MAC, cythe size of reference image that can be handled in cles will increase, and thus the cascaded chip conguration will not be needed for increasing the speed of execution for the same frame rate. Performance of the NCCF algorithm was evaluated on a PC with Intel Pentium-4 3-GHz CPU and 512-Mb DDR2 RAM, and on the proposed architecture. Results of the evaluation are shown in Table VII. Performance of NCCF algorithm on PC (with Microsoft Windows XP OS) was evaluated using highly optimized C code compiled in Microsoft VC++ 6.0 software. The cell broadband engine (Cell BE) processor [17] is the rst implementation of the cell broadband engine architecture (CBEA), developed jointly by Sony, Toshiba, and IBM. The Cell BE includes one POWER processing element (PPE) and eight synergistic processing elements (SPEs). The Cell BE architecture is designed to be well-suited for a wide variety of programming models and allows for partitioning of work between the PPE and the eight SPEs. The SPE is a modular design consisting of a synergistic processing unit (SPU) and a memory ow controller (MFC). The SPUs SIMD support can perform operations on 16 8-bit integers, 8 16-bit integers, 4 32-bit integers, or 4 single-precision oating-point numbers per cycle. At 3.2 GHz, each SPU is capable of performing up to 51.2 billion 8-bit integer operations or 25.6 GFLOPs in single precision. The cell processor can perform 218 GFlops at 3.2 GHz and is designed for high-end imaging applications. Table VIII compares the performance of the cell processor with that of the proposed architecture in terms of GFLOPS/ GHz. Higher value of GFLOPS/GHz implies higher number of oating-point computations can be done per gigahertz. Block matching is used to reduce temporal redundancies between frames in the video industry. This scheme has been extensively used in video coding standards (i.e., H.261, MPEG) [9]–[11]. In the literature, several architectures have been discussed for implementation of the “full search block matching” (FSBM) algorithm. Table IX compares various architectures interms of search range, number of PEs (WPs) and criterion for evaluating the best match. The search range of the proposed architecture is exible and can be varied with time from a small to a very large value. Architectures discussed in [8], [12], [13], and [24] require cascaded chip conguration to increase the search range. Using and , we the data ow in [8], [12], or [13], for would need 50 such chips to cover possible search locations. Although such a conguration would be very fast, but using 50 chips in a space-constrained application would not be possible. [23] and [25]–[27] do not support cascading. Compared to other architectures, the proposed architecture offers a exible search range that can vary from a small to a very large value without the need of cascaded chip conguration. Although it is well known that cross correlation can be efciently implemented in the transform domain, the normalized form of cross correlation which is preferred for image registration applications does not have a simple frequency domain exterms can be implemented by FFT, whereas pression. terms cannot be implemented by FFT. Even if the FFT approach reduces the computational requirements, the development of a multiprocessor machine with dedicated processing elements and specialized architecture is unavoidable [6]. Another disadvantage is that more processing accuracy is required beterms in the comcause of the involvement of putation of FFT, thus making the hardware complex. In [14], a complex multiprocessor system is used to implement BST based on FFT. Table X compares the implementation, while Table XI compares performance of the proposed architecture with [14]. Table XII compares pipelined implementation of NCCF [15] with the proposed architecture. VI. CONCLUSION A new class of fully parameterizable architecture for real time image registration is proposed in this paper. By computing several coefcients in parallel, the proposed architecture is capable of speeding up NCCF, MSE, and even the extended version of widely used NCCF-BST. The proposed architecture allowsAuthorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.988IEEE TRANSACTIONS ON VERY LARGE SCALE INTEGRATION (VLSI) SYSTEMS, VOL. 15, NO. 9, SEPTEMBER 2007TABLE X IMPLEMENTATION COMPARISON BETWEEN THE PROPOSED ARCHITECTURE AND [14]TABLE XI PERFORMANCE COMPARISON BETWEEN THE PROPOSED ARCHITECTURE AND [14]TABLE XII PERFORMANCE COMPARISON BETWEEN THE PROPOSED ARCHITECTURE AND [15]serial input but performs parallel processing based on systolic array design. The architecture supports both cascaded and noncascaded chip conguration. Thus, based on the proposed architecture, an efcient application-specic integrated circuit (ASIC) can be implemented to considerably speed up image registration for applications that require the size of both the search and the reference image to vary with time from a small to a very large value. ACKNOWLEDGMENT N. Gupta would like to thank B. V. Rao and K. V. Sujatha from Imaging Infrared Division, RCI, Hyderabad, India, for their constant support, fruitful suggestions, and discussions. REFERENCES[1] P. F. Aschwanden, “Experimenteller Vergleich uon Korrelationskriterien. in der Bildanalyse,” Ph.D. dissertation, Promotion, Hartung-Gorre Verlag Konstanz, ETH Zurich, Zurich, Switzerland, 1993. [2] SV. R. Kumar et al., “Architectures for real time image registration,” presented at the Int. Symp. Opto-Electron. Imaging, New Delhi, India, 1985. [3] R. V. Venkateswarlu et al., “Mathematical analysis of image registration algorithms for IR images,” Proc. SPIE, pp. 242–253, 1993. [4] R. Srinivasan and K. R. Rao, “Predictive coding based on efcient motion estimation,” IEEE Trans. Commun., vol. COM-33, no. 8, pp. 888–896, Aug. 1985.[5] M. Cavadini, M. Wosnitza, M. Thaler, and G. Troster, “A VLSI architecture for real time object detection on high resolution images,” in Proc. 8th Euro. Signal Process. Cong. (EUSIPCO), 1996, pp. 1475–1478. [6] M. Cavadini, M. Wosnitza, M. Thaler, and G. Troster, “A multiprocessor system for real time high resolution image correlation,” in Proc. IEEE Int. Conf. Appl. Specic Syst., Arch. Process., 1997, pp. 384–391. [7] M. Wosnitza, “High precision 1024 point FFT processor for 2D object detection,” Ph.D. dissertation, Swiss Federal Inst. Technol. (ETH), Zurich, Switzerland, 1999. [8] K. M. Yang, M. T. Sun, and L. Wu, “A family of VLSI design for the motion compensation block-matching algorithm,” IEEE Trans. Circuits Syst., vol. 36, no. 11, pp. 1317–1325, Oct. 1989. [9] M. Liou, “Visual telephony as an ISDN application,” IEEE Commun. Mag., vol. 28, no. 2, pp. 30–46, Feb. 1991. [10] H. LeGall, “MPEG: A video compression standard for multimedia applications,” Comm. ACM, vol. 34, no. 4, pp. 46–58, 1991. [11] G. Morrison, “Video coding standards for multimedia: JPEG, H.261, MPEG,” Proc. Inst. Electr. Eng. Colloq. Technol. Support Multimedia, vol. 88, pp. 2/1–2/4, 1992. [12] C. Sanz, M. J. Garrido, and J. M. Meneses, “VLSI architecture for motion estimation using the block-matching algorithm,” in Proc. Euro. Des. Test Conf., 1996, pp. 310–314. [13] S. H. Nam, J. S. Baek, T. Y. Lee, and M. K. Lee, “A VLSI design for full search block matching motion estimation,” in Proc. IEEE Int. ASIC Conf. Exhibit, 1994, pp. 254–257. [14] M. C. Cavadini et al., “A multiprocessor system for real time high resolution image correlation,” IEEE Trans. Very Large Scale Integr. (VLSI) Syst., vol. 9, no. 3, pp. 439–449, Jun. 2001. [15] R. Venkateswarlu et al., “Real time hardware implementation for area correlation tracker,” Proc. SPIE, pp. 224–234, 1992. [16] D. Pham et al., “The design and implementation of a rst-generation cell processor,” in ISSCC Dig. Tech. Papers, 2005, pp. 184–185. [17] STI Design Center, Austin, TX, “IBM cell specications,” 2004 [Online]. Available: /cell/home.html [18] A. Takagi, S. Muramatsu, and H. Kiya, “Motion estimation with power scalability and its VHDL mode,” IEICE Trans. Fundam., vol. E83-A, no. 8, pp. 118–121, Aug. 2000. [19] K. Konstantinides, “Key components in the design of image and video compression ICs,” BP Labs, Tech. Rep. HPL -94 –47, 1994 [Online]. Available: /techreports/94/ [20] N. Roma and L. Sousa, “Efcient and congurable full-search blockmatching processors,” IEEE Trans. Circuits Syst. Video Technol., vol. 12, pp. 1160–1167, Dec. 2002. [21] S. Wong, S. Vassiliadia, and S. D. Cotofana, “SAD implementation in FPGA hardware,” in Proc. 12th Annu. Workshop Circuits, Syst., Signal Process. (PRORlSC)., 2001, pp. 738–742. [22] Z. Diogo, C. Luigi, B. Sergio, and S. Altamiro, “An architecture for MPEG motion estimation,” presented at the VII Workshop IBERCHIP (IWS), Montevideo, Uruguay, 2001. [23] H. Loukil, F. Ghozzi, A. Samet, M. A. B. Ayed, and N. Masmoudi, “Hardware implementation of block matching algorithm with FPGA technology,” in Proc. 16th Int. Conf. Microelectron., 2004, pp. 542–546. [24] H. Wei-feng, B. Yun-long, and M. Zhi-gang, “Efcient frame-level pipelined array architecture for full-search block-Matching motion estimation,” in Proc. IEEE Int. Symp. ISCAS, 2005, pp. 2887–2890. [25] M. Mohammadzadeh, M. Eshghi, and M. M. Azadfar, “An optimized systolic array architecture for full search block matching algorithm and its implementation on FPGA chips,” in Proc. IEEE NEWCAS Conf., 2005, pp. 327–330. [26] K. Tavassoli and W. Badawy, “A prototype for parallel motion estimation architecture using full-search block matching algorithm,” in Proc. Digit. Comput. Video, 2002, pp. 129–134. [27] V. Ila, R. Garcia, and F. Charot, “VLSI architecture for an underwater robot vision system,” Oceans, vol. 1, pp. 674–679, Jun. 2005. [28] L. C. Liu, J. C. Chien, Y. H. Chuang, and C. C. Li, “A frame-level FSBM motion estimation architecture with large search range,” in Proc. IEEE Conf. Adv. Video Signal Based Surveillance, 2003, pp. 327–333. [29] Y. K. Lai and L. G. Chen, “A data-interlacing architecture with two dimensional data-reuse for full-search block matching algorithm,” IEEE Trans. Circuits Syst. Video Technol., vol. 8, no. 2, pp. 124–127, Apr. 1998. [30] C. Y. Lee and M. C. Lu, “An efcient VLSI architecture for full search block matching algorithms,” J. VLSI Signal Process., vol. 15, pp. 275–283, 1997. [31] J. C. Tuan, T. S. Chang, and C. W. Jen, “On the data reuse and memory bandwidth analysis for full-search block-matching VLSI architecture,” IEEE Trans. Circuits Syst. Video Technol., vol. 12, no. 1, pp. 61–72, Jan. 2002. [32] D. Barnea and H. Silverman, “A class of algorithms for fast digital image registration,” IEEE Trans. Comput., vol. C-21, no. 2, pp. 179–186, Feb. 1972.Authorized licensed use limited to: SOUTH CHINA UNIVERSITY OF TECHNOLOGY. Downloaded on August 09,2010 at 08:16:30 UTC from IEEE Xplore. Restrictions apply.。