匹配滤波器
- 格式:doc
- 大小:69.29 KB
- 文档页数:5

匹配滤波器设计仿真匹配滤波器是一种用于信号处理和通信系统中的重要滤波器设计。
它可以用于信号匹配、频率选择和滤波等应用。
在设计匹配滤波器之前,我们需要了解滤波器设计的基本原理和方法。
本文将介绍匹配滤波器的设计过程,并通过仿真实例展示其性能。
首先,我们需要确定滤波器的频率响应。
频率响应是描述滤波器在不同频率下输出的响应的函数。
常见的频率响应包括低通、高通、带通、带阻等。
根据系统要求,选择适当的频率响应。
其次,选择合适的滤波器类型。
常见的滤波器类型有FIR滤波器和IIR滤波器。
FIR滤波器是一种无反馈滤波器,采用有限长冲激响应的方式实现滤波功能。
IIR滤波器是一种有反馈滤波器,采用递归方式实现滤波功能。
根据需求,选择适合的滤波器类型。
然后,选择适当的滤波器参数。
滤波器参数包括滤波器阶数、滤波器系数等。
滤波器阶数反映了滤波器的复杂程度,一般情况下,滤波器的阶数越高,性能越好,但计算和实现的复杂度也越高。
滤波器系数是滤波器的输出与输入之间的系数关系。
通过调整滤波器参数,可以实现滤波器设计的灵活性和性能优化。
最后,进行匹配滤波器的仿真。
在现代工具和平台的支持下,匹配滤波器的仿真已经变得非常方便和高效。
可以使用MATLAB、Simulink、LabVIEW等软件工具进行匹配滤波器的仿真。
通过仿真可以评估滤波器的性能、验证设计的正确性和优化设计参数。
下面我们通过一个仿真实例来演示匹配滤波器的设计和仿真过程。
假设我们要设计一个低通滤波器,频率响应为0-1kHz,滤波器类型为FIR滤波器,滤波器阶数为10,采样率为10kHz。
首先,确定滤波器的频率响应。
由于是低通滤波器,我们希望在1kHz以下的频率范围内的信号通过,而在1kHz以上的频率范围内的信号被截止。
可以选择一个合适的频率响应函数,例如一阶巴特沃斯低通滤波器函数。
然后,选择滤波器类型。
这里选择使用FIR滤波器,因为FIR滤波器具有线性和时移不变的特点,适用于许多实际应用。
1.5.2. 匹配滤波器最佳接收机还可以有另外的一种结构,即匹配滤波器。
为了说明匹配滤波器的基本原理,我们从这样一个直观的分析入手。
我们知道,通信系统的误码率与输出的信噪比有关,接收端输出信噪比越大,则系统的误码率越小。
因此,如果在每次判决前,输出的信噪比都是最大的,则该系统一定是误码率最小的系统。
遵从这种考虑原则,我们可以得到匹配滤波器的概念。
接收机通过匹配滤波器使输出信噪比最大。
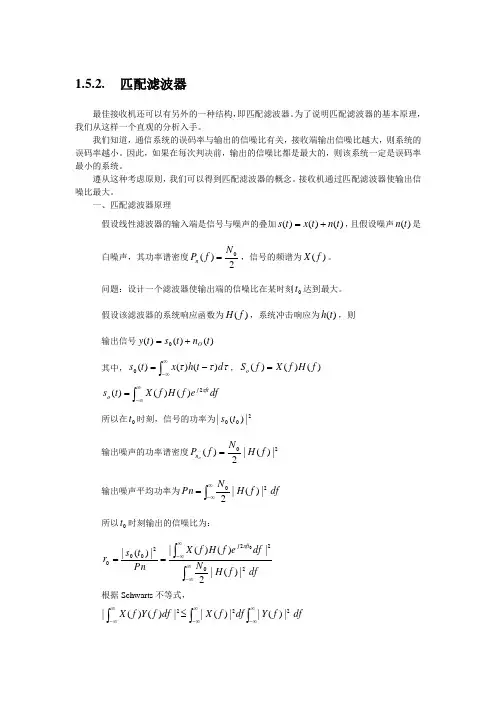
一、匹配滤波器原理假设线性滤波器的输入端是信号与噪声的叠加)()()(t n t x t s +=,且假设噪声)(t n 是白噪声,其功率谱密度2)(0N f P n =,信号的频谱为)(f X 。
问题:设计一个滤波器使输出端的信噪比在某时刻0t 达到最大。
假设该滤波器的系统响应函数为)(f H ,系统冲击响应为)(t h ,则 输出信号)()()(0t n t s t y O +=其中,⎰∞∞--=τττd t h x t s )()()(0,)()()(f H f X f S o =⎰∞∞-=df e f H f X t s ft j o π2)()()(所以在0t 时刻,信号的功率为200|)(|t s 输出噪声的功率谱密度20|)(|2)(f H N f P o n =输出噪声平均功率为⎰∞∞-=df f H N Pn 20|)(|2所以0t 时刻输出的信噪比为:⎰⎰∞∞-∞∞-==dff H N df e f H f X Pnt s r ft j 20222000|)(|2|)()(||)(|0π根据Schwarts 不等式,⎰⎰⎰∞∞-∞∞-∞∞-≤df f Y df f X df f Y f X 222|)(||)(||)()(|2022|)(|N E N df f X r s=≤⎰∞∞- 当02*)()(ft j ef KX f H π-=时等式成立。
因此,如果设计一个滤波器,它的系统响应函数为02*)()(ft j e f KX f H π-=时,滤波器输出信噪比最大。
实验二匹配滤波器一、 实验目的1、了解匹配滤波器的工作原理。
2、掌握二相编码脉压信号的压缩比、主旁瓣比、码元宽度的测量方法。
3、加深和巩固课堂所学有关距离分辨力、横向滤波器和匹配滤波方面的知识。
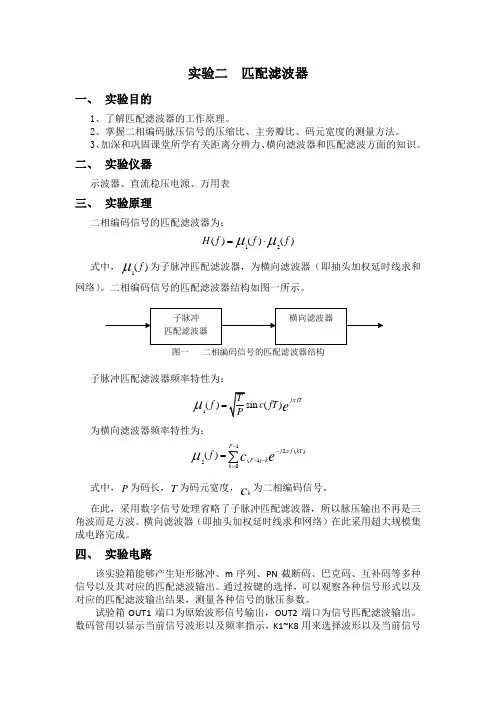
二、 实验仪器示波器、直流稳压电源、万用表三、 实验原理二相编码信号的匹配滤波器为:12()()()H f f f μμ=⋅式中,1()f μ为子脉冲匹配滤波器,为横向滤波器(即抽头加权延时线求和网络)。
二相编码信号的匹配滤波器结构如图一所示。
图一 二相编码信号的匹配滤波器结构子脉冲匹配滤波器频率特性为:1()()j fTf c fT e πμ=为横向滤波器频率特性为:12()(1)2()P j f kT P k k f c eπμ----==∑式中,P 为码长,T 为码元宽度,k c 为二相编码信号。
在此,采用数字信号处理省略了子脉冲匹配滤波器,所以脉压输出不再是三角波而是方波。
横向滤波器(即抽头加权延时线求和网络)在此采用超大规模集成电路完成。
四、 实验电路该实验箱能够产生矩形脉冲、m 序列、PN 截断码、巴克码、互补码等多种信号以及其对应的匹配滤波输出。
通过按键的选择,可以观察各种信号形式以及对应的匹配滤波输出结果,测量各种信号的脉压参数。
试验箱OUT1端口为原始波形信号输出,OUT2端口为信号匹配滤波输出。
数码管用以显示当前信号波形以及频率指示,K1~K8用来选择波形以及当前信号频率。
其含义如下:1、按键K1:数码管显示P。
单脉冲。
周期1ms;脉冲宽度30us。
2、按键K2:数码管显示SP。
脉冲串。
周期1ms;脉冲宽度10us。
一个周期有7个单脉冲。
3、按键K3:数码管显示31。
31位m序列。
无限长;码元宽度1us。
4、按键K4:数码管显示P31。
31位PN截断码。
周期1ms;码元宽度1us。
5、按键K5:数码管显示b13。
13位巴克码。
周期1ms;脉冲宽度30us。
6、按键K6:数码管显示cb47。
匹配滤波器
匹配滤波器是一种数字信号处理中常用的滤波器。
它用于检测信号中特定的频率成分或者特定的信号模式。
匹配滤波器的输入信号和滤波器的内部参考信号进行相关运算,输出的结果表示输入信号和参考信号的匹配程度。
匹配滤波器的数学表示可以用以下公式表示:
y(t) = ∫[x(t) * h(t-T)]dt
其中,y(t)是输出信号,x(t)是输入信号,h(t)是滤波器的内部参考信号,*表示卷积运算,T表示滤波器的延时。
匹配滤波器的应用领域包括雷达信号处理、通信系统、图像处理等。
在雷达信号处理中,匹配滤波器可以用来检测目标的回波信号;在通信系统中,匹配滤波器可以用来接收和识别特定的信号;在图像处理中,匹配滤波器可以用来检测图像中的特定模式。
总之,匹配滤波器是一种可以用来检测特定信号频率成分或者模式的滤波器,广泛应用于各个领域的信号处理中。


雷达原理--匹配滤波器原理及matlab仿真雷达原理匹配滤波器是一种常用的信号处理技术,广泛应用于雷达系统中。
它的原理基于信号与滤波器的互相关运算,可以用于雷达目标检测、测距和速度估计等。
首先,我们来了解一下雷达原理。
雷达系统是一种利用电磁波进行目标探测的技术,通过发射射频电磁波并接收被目标反射回来的电磁波来实现目标探测。
雷达发射出的电磁波经过空气传播到达目标,一部分电磁波会被目标反射回来,称为回波信号。
回波信号经过接收天线接收并传输到雷达系统中进行信号处理。
信号处理是雷达系统中非常重要的环节,对于目标的检测和信息提取起着至关重要的作用。
而匹配滤波器作为一种高效的信号处理方式,可以提高雷达系统的目标检测性能。
匹配滤波器的原理是通过与目标信号进行互相关运算来实现目标检测。
互相关运算是一种计算两个信号相似度的方法,它通过对两个信号进行卷积运算,得到一个新的信号作为输出。
匹配滤波器的输入信号是雷达系统接收到的回波信号,而目标信号是事先已知的模板信号。
为了更好地理解匹配滤波器的原理,我们可以考虑一个简化的问题,即单目标检测。
假设我们已经知道了目标信号的波形形状,并将其作为匹配滤波器的模板信号。
在雷达系统中接收到的回波信号经过与模板信号的互相关运算后,输出的信号中会包含目标信号的相关成分。
为了实现匹配滤波器的原理,我们可以使用MATLAB进行仿真。
首先,需要生成一个目标信号的模板。
我们可以通过设定目标信号的波形和参数来生成这个模板,例如使用正弦函数生成一个具有特定频率和振幅的信号。
f = 1000; % 目标信号的频率T = 1/f; % 目标信号的周期t = 0:T/1000:T; % 目标信号的时间序列A = 1; % 目标信号的振幅target_signal = A*sin(2*pi*f*t); % 生成目标信号的模板接下来,我们需要生成接收到的回波信号。
假设我们知道回波信号的波形和参数,我们可以使用类似的方法生成它。
匹配滤波器
⏹匹配滤波器的定义⏹匹配滤波器的性质⏹计算举例
1. 匹配滤波器的定义
定义:白噪声环境下输出信噪比最大的最佳线性滤波器
冲激响应: 输入信号的共轭镜像,对实信号,当c=1
时,h(t)与s(t)关于
t 0/2呈偶对称关系 0()()h t cs t t *=-()h t ()s t 1c =0/2
t t 0)
()()(*t j n e G S c H ωωωω-⋅=0
*()()j t H cS e -ωω=ω
(1)输出的最大信噪比与输入信号的波形无关
200()122/2m S d E d N N ∞-∞ωω
==π⎰最大信噪比只与信号的能量和噪声的强度有关,与信号
的波形无关
(2) t 0 应该选在信号s (t )结束之后
0()()
h t cs t t =-如果要求系统是物理可实现的,则t 0应该选在信号s (t )结束之后。
(3)匹配滤波器对信号幅度和时延具有适应性
设 1()()
s t as t =-τ1()()j S aS e -ωτ
ω=ω1101010*11()*
()*()()()()()()j t j t j t j t t j t t H cS e
caS e acS e
e aH e -ω-ω-τ-ω-ω-τ--ω-τ-ω=ω=ω=ω=ω()
H ω如果选择 t 1=τ+t 0 1()()
H aH ω=ω
对频移不具有适应性 2S ( )=S( )d ωω+ω0
*2()()j t d H cS e
-ωω=ω+ω不同于H (ω)
匹配滤波器对信号的频移不具有适应性。
6 内容提要及结构本章介绍匹配滤波器的概念,讨论一般匹配滤波器(既适用于白噪声,也适用于色噪声)普遍形式的冲激响应和传输函数;进一步讨论白噪声背景下的匹配滤波器的冲激响应、传输函数和基本性质;最后,应用白化处理方法求广义匹配滤波器的传输函数。
本章内容逻辑结构如图2.1.1所示。
2.2 目的及要求本章的目的是使学习者理解匹配滤波器的概念,熟悉匹配滤波器的作用及应用条件;掌握一般匹配滤波器冲激响应方程和传输函数的推导方法,通过传输函数理解匹配滤波器的作用;掌握白噪声背景下匹配滤波器冲激响应和传输函数,熟悉白噪声背景下匹配滤波器的性质;理解白化滤波器的概念,掌握白化处理方法及广义匹配滤波器传输函数;熟悉物理可实现和物理不可实现匹配滤波器的特点,掌握物理可实现匹配滤波器冲激响应和传输函数的求取方法。
2.3 学习要点2.3.1 匹配滤波器的概念● 内容提要:本小节主要简述匹配滤波器的产生思路、定义、特点、作用和研究思路。
● 关键点:理解匹配滤波器的使用条件,熟悉匹配滤波器的研究思路。
1.匹配滤波器的产生思路由于信号在信道中传输时受到噪声的污染,接收设备所接收的信号是信号加噪声,接收图2.1.1 内容逻辑结构图匹配滤波器色噪声背景下的匹配滤波器 一般匹配滤波器 白噪声背景下的匹配滤波器 匹配滤波器的概念冲激响应传输函数 传输函数 白化处理方法性质 冲激响应传输函数7设备要达到有效、可靠恢复被传送信号的目的,需要尽可能地压制或抑制噪声,使信号在信号加噪声中所占的比例尽可能大,从而减小噪声对信号的影响,有利于对信号的处理。
因此,以输出信号与噪声的功率比(简称为信噪比)达到最大作为标准来设计接收设备就是一种减小噪声影响的思路。
2.匹配滤波器的定义在输入为确定信号加平稳噪声的情况下,使输出信噪比达到最大的线性系统称为匹配滤波器。
3.匹配滤波器的特点① 匹配滤波器是线性系统,而且在大多数情况下限定为线性时不变系统。
匹配滤波器原理
匹配滤波器是一种数字信号处理技术,它的作用是对信号进行过滤、优化和重建,以达到用户期望的输出信号。
匹配滤波器通过结合数学分析、实验测试等方法来提取信号中的特征,从而有效地进行噪声抑制、频率特性增强等滤波操作。
这些特性的改
变可以帮助信号重建,并且能够隔离来自不同来源的信号。
匹配滤波器的原理为:根据输入信号的特征和目标信号的特性,
把输入信号的特征和目标信号的特性进行对比,并把输入信号调整到
与目标信号相似,从而获得输出信号。
匹配滤波器有四类基本结构:线性滤波器、非线性滤波器、单极
性滤波器和双极性滤波器。
线性滤波器是指滤波的滤波器的响应函数
是线性的,如低通、高通、带通和带阻滤波器。
非线性滤波器是指滤
波器的响应函数是非线性的,如椭圆滤波器、中值滤波器、峰值滤波
器和梯形滤波器等。
单极性滤波器和双极性滤波器是将线性滤波器进
行改进后设计出来的,其特点是基线偏移小,延迟时间短,增益高,
适合于高速、高精度的在线应用。
匹配滤波器的优点在于可以从输入信号中提取出某种特征,并重
新建立信号的特征,使其达到用户期望的信号特性。
同时,它也有可
以抑制某一频率,将信号改变成具有更好特性的信号,进而有效抑制
噪声,保证信号的清晰度。
数字通信课程设计
匹配滤波器
摘要
在通信系统中,滤波器是重要的部件之一,滤波器特征的选择直接影响数字信号的恢复。
在数字信号接收中,滤波器的作用有两个方面,使滤波器输出有用信号成分尽可能强;抑制信号带外噪声,使滤波器输出噪声成分尽可能小,减少噪声对信号判决的影响。
对最佳线性滤波器的设计有一种准则是使滤波器输出信噪比在特定时刻到达最大,由此导出的最佳线性滤波器称为匹配滤波器。
在数字通信中,匹配滤波器具有广泛的应用。
因此匹配滤波器是指滤波器的性能与信号的特征取得某种一致,使滤波器输出端的信号瞬时功率与噪声平均功率的比值最大。
本文设计并仿真了一种数字基带通信系统接收端的匹配滤波器。
一、课程设计的目的
通过本次对匹配滤波器的设计,让我们对匹配滤波器的原理有更深一步的理 解,掌握具体的匹配滤波器的设计方法与算法。
二、课程设计的原理
设接收滤波器的传输函数为)(f H ,冲击响应为)(t h ,滤波器输入码元)(t s 的持续时间为s T ,信号和噪声之和)(t r 为
)()()(t n t s t r += s T t ≤≤0 式中,)(t s 为信号码元,)(t n 为白噪声。
并设信号码元)(t s 的频谱密度函数为)(f S ,噪声)(t n 的双边功率谱密度为
2/0n P n =,0n 为噪声单边功率谱密度。
假定滤波器是线性的,根据叠加定理,当滤波器输入信号和噪声两部分时,滤波器的输出也包含相应的输出信号和输出噪声两部分,即
)()()(00t n t s t y +=
由于:)()()()()()(2
*
f P f H f P f H f H f P R R Y ==
)(f P R 为输出功率谱密度,)(f P R 为输入功率谱密度,2/)(0n f P R =
这时的输出噪声功率0N 等于
⎰
⎰∞
∞
-∞
∞
-=•=df f H n
df n f H N 2
02
0)(22)(
在抽样时刻0t 上,输出信号瞬时功率与噪声平均功率之比为
⎰
⎰
∞
∞
-∞
∞
-=
=
df
f H n df e f S f H N t s r ft j 2
02
20
000)(2
)()()(0
π
为了求出0r 的最大值,利用施瓦兹不等式求0r 的最大值
2
02
2
2
02
202)(2
)()()(2
)()(0
n E df
f H n df
f S df f H df
f H n df
e
f S f H r ft j =
≤
=
⎰
⎰
⎰
⎰
⎰∞
∞
-∞
∞
-∞
∞
-∞∞
-∞
∞
-π 且当时02*)()(ft j e f kS f H π-=,等式成立,即得到知道的信噪比为
2n E 在白噪声干扰的背景下,按上式的设计的线性滤波器,将能在给定时刻0t 上获得最大输出信噪比02n E 。
是输出信噪比最大时刻。
这种滤波器就是最大信噪比意义下的最佳线性滤波器,由于它的传输特性与信号频谱的复共轭一致,称为匹配滤波器。
匹配滤波器的特性还可以用冲激响应函数)(t h :
⎰⎰∞
∞
--∞
∞
-==
df e e f kS df e
f H t h ft j ft j ft
j πππ22*20)()()(
⎰∞
∞
--=+-=)()()(00t t ks d t t s k ττδτ
可见,匹配滤波器的冲激响应)(t h 就是信号)(t s 的镜像)(0t t s -,但在时
间轴上平移了0t 。
0t 是输出信噪比最大时刻。
三、课程设计的内容
设计仿真了数字基带通信系统在接收端接收到模拟信号后通过匹配滤波器的效果,其中匹配滤波器的输入信号我们假定为正弦信号,经过匹配滤波器的输出信号作为抽样判决器的输入信号。
我们通过比较匹配滤波器的输入输出信号,验证得出其性能特性。
如下图所示的仿真结果,我们假定匹配滤波器的输入信号为正弦信号与白噪声的叠加,其频率,采样频率,延时时间,。
由实验的结果,我们可以看出匹配滤波器的单位冲激响应幅度谱与输入信号的幅度谱一致,符合上面我们推导的公式;由滤波器的输出信号我们可以得出,在抽样时刻处,信号有最大值,在输出信号的幅度谱中,干扰噪声白噪声明显减小,信号的有用成分被保留下来,体现出了匹配滤波器抑制噪声,保证在抽样时刻有最大值的特性,从而进一步保证了输出信噪比在抽样时刻最大,为下一步抽样判决提供了有利的条件。
由此可以看出匹配滤波器对数字基带通信系统的通信可靠性的提高有着很重要的作用。
四、 附录
实验程序:
clear all ; close all ;
fc=20; %余弦信号的频率 fs=5*fc; %采样频率 ts=1/fs; k=1;
to=2; %采样时刻 t=[0:ts:2-ts]; t1=[0:ts:4-2*ts];
0.5
1
1.52
-100
10
t/s S (t )
输入信号+噪声
-50
050
00.5
1f(Hz)
|S (W )|
输入信号幅度谱
0.5
1
1.52
-100
10
t/s
h (t )
冲激响应
-50
050
00.5
1f(Hz)
|H 1(W )|
单位冲激响应幅度谱
1
23
4
-1000
1000
t/s
S o (t )
匹配滤波器输出信号-50
050
050
100f(Hz)
|S o 1(W )|
输出信号幅度谱
freq1=linspace(-fs/2,fs/2,length(t));
freq2=linspace(-fs/2,fs/2,length(t1));
Noise=randn(1,length(t)); %白噪声
signal=3*cos(2*pi*fc*t+pi*k*t.^2)+Noise; %信号
h1=3*cos(2*pi*fc*(to-t)+pi*k*(to-t).^2)+Noise; %匹配滤波器
So1=conv2(signal,h1); %信号卷积
subplot(321)
plot(t,signal);
axis([0,2,-10,10]);
xlabel('t/s');
ylabel('S(t)');
title('输入信号+噪声');
subplot(322)
plot(freq1,fftshift(abs(fft(signal))/length(t))),xlabel('f(Hz)'),ylab el('|S(W)|'),title('输入信号幅度谱');
subplot(323)
plot(t,h1);
axis([0,2,-10,10]);
xlabel('t/s');
ylabel('h(t)');
title('冲激响应');
subplot(324)
plot(freq1,fftshift(abs(fft(h1)/length(t)))),xlabel('f(Hz)'),ylabel(' |H1(W)|'),title('单位冲激响应幅度谱');
subplot(325)
plot(t1,So1);
xlabel('t/s');
ylabel('So(t)');
title('匹配滤波器输出信号');
subplot(326)
plot(freq2,fftshift(abs(fft(So1)/length(t1)))),xlabel('f(Hz)'),ylabel ('|So1(W)|'),title('输出信号幅度谱');。