第三章 雷达天线及伺服系统
- 格式:pdf
- 大小:1.49 MB
- 文档页数:20
基于Simulink的某雷达天线伺服系统性能改进方法研究文哲【摘要】为了满足高精度随动系统的精度要求,以一种高精度伺服系统作为研究对象,建立力矩电机驱动的伺服系统的数学模型,采用超前滞后校正和提高增益、引入滞后环节的控制方法,对系统进行建模和仿真,实验结果表明,超前滞后校正的控制方法可以提高系统响应的快速性,满足高精度要求,提高增益、引入滞后环节的控制方法可以显著改善伺服系统死区非线性对于系统的影响.%In order to meet the accuracy requirement of the high accuracy servo system, this paper takes a high accuracy servo system as a research object and describes the establishment of the mathematic model of the servo system driven by torque motor. The control methods of lead-lag correction, gain improvement and lagging link are used to model and simulate the system. The simulation test results show that lead-lag correction control method can improve the response speed of the system and meet the high precision requirement, while gain improvement and the introduction of lagging link control method can reduce the im-pacts of the servo system dead zone nonlinearity on the system.【期刊名称】《现代电子技术》【年(卷),期】2013(036)003【总页数】5页(P16-20)【关键词】随动系统;超前滞后校正;滞后环节;死区;非线性【作者】文哲【作者单位】北京遥感设备研究所随动系统研究室,北京 100039【正文语种】中文【中图分类】TN957.2-34所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。
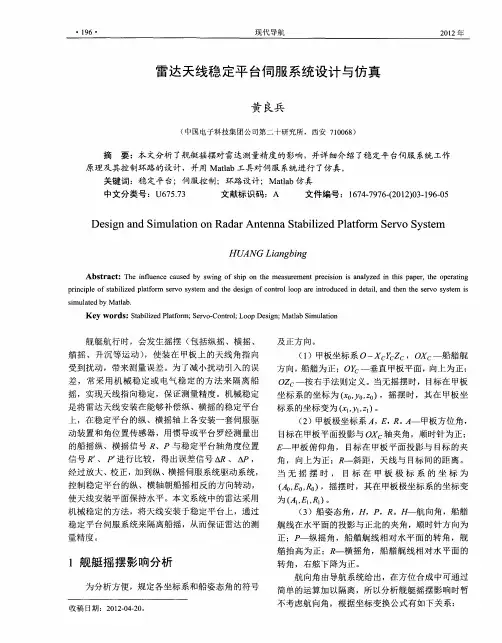
270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
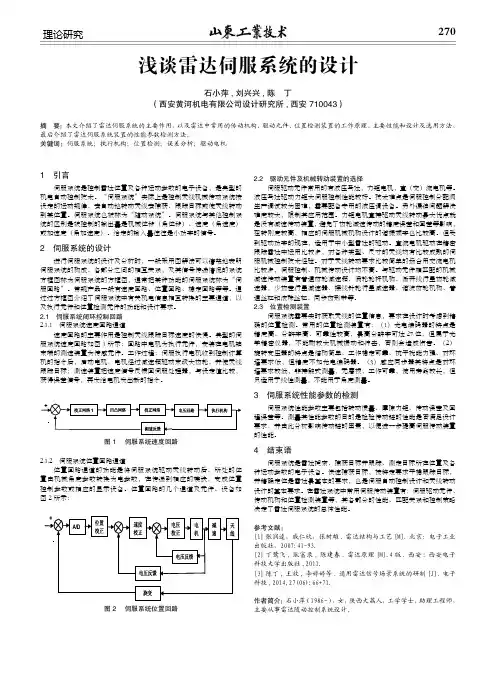
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图1.2 系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
自动控制理论课程设计设计题目雷达天线伺服控制系统姓名学号专业班级指导教师设计时间目录第一章绪论 (1)1.1课题背景及意义 (1)1.2课题研究的目的 (1)1.3课题研究的主要内容 (2)第二章系统的总体设计 (3)2.1系统的组成图 (3)2.2控制系统的结构图 (3)2.3系统的简化方框图及简单计算 (4)2.4系统的动态分析 (6)第三章系统的根轨迹和伯德图 (7)3.1系统的根轨迹图及分析 (7)3.2系统的Bode图及分析 (8)第四章校正设计 (10)4.2校正后的根轨迹图及分析 (12)4.2校正后的Bode图及分析 (13)第五章总结 (15)参考文献 (16)第一章绪论1.1课题背景及意义雷达天线伺服控制系统是用来控制天线,使之准确地自动跟踪空中目标的方向,也就是要使目标总是处于天线轴线的方向上的,用来精确地跟随或复现某个过程的反馈控制系统,又称随动系统,主要解决位置跟随系统的控制问题。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度,加速度的反馈控制系统,并要求具有足够的控制精度。
其作用是使输出的机械位移(或转角)准确地跟踪输入地位移(或转角)。
伺服系统的结构组成和其他形式反馈控制系统没有原则上的区别,它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
雷达天线伺服控制系统,可以准确确定障碍物的位置。
利用雷达天线伺服控制系统可以探测飞机、舰艇、导弹以及其他军事目标,信息处理、数字处理,收集、综合地面运动目标和固定目标的情报及图像,还可以探测低空飞行的威胁,为用户提供包含面广的威胁画面。
对空搜索、边搜索边测距、空地测距、自动检测;除了军事用途外,雷达在交通运输上可以用来为飞机、船只导航;在天文学上可以用来研究星体;在气象上可以用来探测台风,雷雨,乌云等等。
雷达天线伺服控制系统的优点是白天黑夜均能探测远距离的目标,且不受雾、云和雨的阻挡,具有全天候、全天时的特点,并有一定的穿透能力。
雷达位置伺服系统校正班级: 0xx班学号: xx姓名: xx指导老师: x老师—2011.12雷达位置伺服系统校正一、雷达天线伺服控制系统(一) 概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
图1-1 雷达天线伺服控制系统原理图(二) 系统的组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、执行机构。
以上部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析: 1、受控对象:雷达天线; 2、被测量:角位置m θ;3、给定值:指令转角*m θ;4、传感器:由电位器测量m θ,并转化为U ;5、控制器:放大器,比例控制;6、执行器:直流电动机及减速箱。
雷达天线伺服控制系统
雷达是一种通过将电磁波辐射向目标物体并接收反射波来检测其位置和速度的设备。
雷达天线是雷达系统的重要组成部分,它将电磁波辐射出去,并接收目标物体反射回来的
信号。
雷达天线伺服控制系统的主要作用是使雷达天线保持在目标物的方向上,并能够跟
随目标物的运动轨迹进行调整。
雷达天线伺服控制系统由电机、编码器、控制器等组成。
电机通过传动系统控制雷达
天线的角度,编码器用于反馈雷达天线的角度信息,控制器则根据编码器反馈的信息,控
制电机的转动并保持天线的位置与目标物保持一致。
雷达天线伺服控制系统的优点是精度高、反应迅速、可靠性强、适应性好。
该系统可
以根据各自的需求设置不同的工作模式,以适应不同复杂的环境条件。
当雷达天线工作在
垂直方向的情况下,需要较高的精确度和控制灵敏度。
当雷达天线工作在水平方向时,需
要更快的相应速度和更小的误差范围。
在这种系统中,控制器是枢纽和核心,它对电机、编码器和其他传感器进行信号的采集、处理、分析和判断,并输出控制命令,实现天线角度的控制和跟随。
此外,控制器还
可以提供反馈信息和故障报警标志,对系统的安全性和稳定性起到重要的作用。
总之,雷达天线伺服控制系统具有重要的作用。
这种系统可以确保雷达天线达到准确、快捷、灵活的聚焦目标物的能力,以满足人们对雷达设备的多种应用需求。
为了达到最佳
的工作效率和性能,该系统必须受到严格的质量控制和保养,以保证其安全性和可靠性。
一种雷达天线伺服系统的控制实现方式熊文芳;施治国;袁君【摘要】随着相控阵雷达的广泛应用,雷达天线工作方式从圆周扫描到目标跟踪扫描切换的需求越来越普遍。
为了减少切换过程中的时间损失,保证对目标的连续稳定跟踪,本文提出了一种兼容速度控制与位置控制的伺服系统实现方式,有效缩短了切换时间。
%With thewidely application of the phased array radar,the need of working mode of the radar antenna which switched from the circumferential scan to the target tracking scan is also increasing.In order to reduce the time loss during the switching process and ensuring continuous and stable tracking of targets,this paper presents a method of realizing the servo system with speed control and position control,which shorten the switching time effectively.【期刊名称】《电子测试》【年(卷),期】2016(000)016【总页数】2页(P29-30)【关键词】相控阵雷达;伺服系统;天线扫描方式;速度控制;位置控制【作者】熊文芳;施治国;袁君【作者单位】荆州南湖机械股份有限公司,434000;荆州南湖机械股份有限公司,434000;荆州南湖机械股份有限公司,434000【正文语种】中文伺服系统为雷达的基本组成部分,一般情况下,对空搜索情报雷达天线作360°圆周扫描,圆周扫描时多采用速度控制方式,实现对天线旋转速度的控制。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图1.2 系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
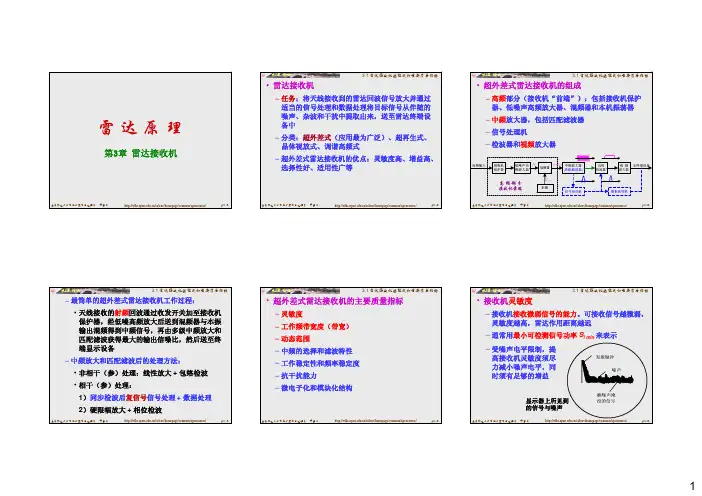
雷达原理复习提纲大全发射机自激振荡式发射机(电真空)主振放大式发射机(电真空发射机、全固态发射机)单级振荡式发射机:简单、经济、轻便。
主振放大式发射机:频率稳定性高、发射信号相位相参、波形灵活。
雷达数据的录取方式:半自动录取和全自动录取固态发射机的优点:不需要阴极加热、寿命长;具有很高的可靠性:体积小、重量轻:工作频带宽、效率高:系统设计和运用灵活:维护方便,成本较低。
雷达原理知识点汇总第一章绪论1、雷达概念(Radar):radar的音译,“Radio Detection and Ranging ”的缩写。
原意是“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。
2、雷达工作原理:发射机在定时器控制下,产生高频大功率的脉冲串,通过收发开关到达定向天线,以电磁波形式向外辐射。
在天线控制设备的控制下,天线波束按照指定方向在空间扫描,当电磁波照射到目标上,二次散射电磁波的一部分到达雷达天线,经收发开关至接收机,进行放大、混频和检波处理后,送到雷达终端设备,能判断目标的存在、方位、距离、速度等。
3、雷达的任务:利用目标对电磁波的反射来发现目标并对目标进行定位。
随着雷达技术的发展,雷达的任务不仅仅是测量目标的距离、方位和仰角,而且还包括测量目标的速度,以及从目标回波中获取更多有关目标的信息。
4、从雷达回波中可以提取目标的哪些有用信息,通过什么方式获取这些信息?斜距R : 雷达到目标的直线距离OP。
方位角α: 目标斜距R在水平面上的投影OB与某一起始方向(正北、正南或其它参考方向)在水平面上的夹角。
俯仰角β:斜距R与它在水平面上的投影OB在铅垂面上的夹角,有时也称为倾角或高低角。
5、雷达工作方式连续波和脉冲波6、雷达测距原理R=(C∆t)/2式中,R为目标到雷达的单程距离,∆t为电磁波往返于目标与雷达之间的时间间隔,C为电磁波的传播速率(3×108米/秒)7、影响雷达性能指标脉冲宽度(窄),天线尺寸(大),波束(窄),方向性。
中国民用航空局空管办关于下发《民用机场多普勒天气雷达系统技术规范》的通知正文:---------------------------------------------------------------------------------------------------------------------------------------------------- 中国民用航空局空管办关于下发《民用机场多普勒天气雷达系统技术规范》的通知民航各地区管理局、监管局,各地区空管局、空管分局(站),各机场公司,各运输(通用)航空公司,飞行学院:为了规范民用机场多普勒天气雷达的建设和运行,我办组织制定了《民用机场多普勒天气雷达系统技术规范》,现下发你们,请遵照执行。
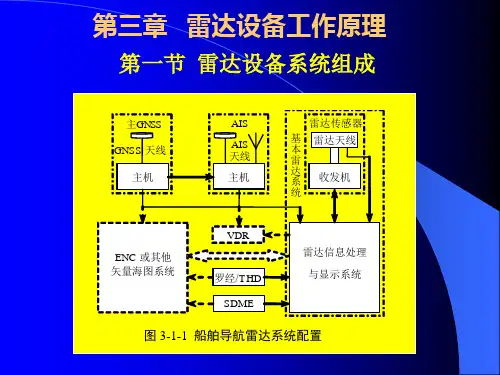
中国民用航空局空管办二0一二年十一月五日民用机场多普勒天气雷达系统技术规范目录第一章总则第二章系统构成第三章总体要求第四章系统功能第一节一般规定第二节产品第三节显示第五章系统性能第一节整体性能第二节各子系统性能第六章环境适应性第七章附则附录一天气雷达图像回波强度彩色色标(略)附录二雷达生成数据及产品文件格式(略)民用机场多普勒天气雷达系统技术规范第一章总则第一条为了规范民用机场多普勒天气雷达系统的建设和运行,依据《中国民用航空气象工作规则》制定本技术规范。
第二条本规范适用于中华人民共和国境内民用机场和军民合用机场民用部分(以下简称民用机场)机场多普勒天气雷达系统的建设和运行。
第三条民用机场多普勒天气雷达系统的构成、总体要求、功能、性能和环境适应性等技术要求应当符合本规范。
第二章系统构成第四条多普勒天气雷达系统主要由天线罩、天线、伺服驱动、发射机、接收机、信号处理器、内设监控、数据处理、数据传输、用户终端、供配电、防雷设施等硬件和相关的系统软件、应用软件构成。
第五条多普勒天气雷达系统按照工作频段分为 X波段、C波段和S波段三种。
第六条多普勒天气雷达系统用户终端包括:预报用户终端、其它用户终端(包括观测用户、空中交通服务部门、机场运行管理部门和航空运营人等用户)和系统监控终端等。