一种机载稳定平台伺服控制系统的设计与实现_赵冠军
- 格式:pdf
- 大小:1.01 MB
- 文档页数:4
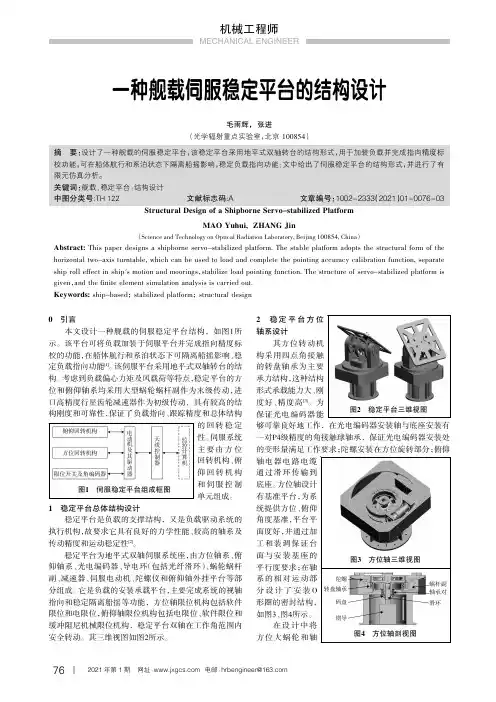
2021年第1期网址: 电邮:*******************一种舰载伺服稳定平台的结构设计毛雨辉,张进(光学辐射重点实验室,北京100854)图3方位轴三维视图陀螺转盘轴承码盘惯导蜗杆副轴承对滑环图4方位轴剖视图引言本文设计一种舰载的伺服稳定平台结构,如图1所示。
该平台可将负载加装于伺服平台并完成指向精度标校的功能,在船体航行和系泊状态下可隔离船摇影响、稳定负载指向功能[1]。
该伺服平台采用地平式双轴转台的结构。
考虑到负载偏心力矩及风载荷等特点,稳定平台的方位和俯仰轴系均采用大型蜗轮蜗杆副作为末级传动,进口高精度行星齿轮减速器作为初级传动,具有较高的结构刚度和可靠性,保证了负载指向、跟踪精度和总体结构的回转稳定性。
伺服系统主要由方位回转机构、俯仰回转机构和伺服控制单元组成。
1稳定平台总体结构设计稳定平台是负载的支撑结构,又是负载驱动系统的执行机构,故要求它具有良好的力学性能、较高的轴系及传动精度和运动稳定性[2]。
稳定平台为地平式双轴伺服系统座,由方位轴系、俯仰轴系、光电编码器、导电环(包括光纤滑环)、蜗轮蜗杆副、减速器、伺服电动机、陀螺仪和俯仰轴外挂平台等部分组成。
它是负载的安装承载平台,主要完成系统的视轴指向和稳定隔离船摇等功能,方位轴限位机构包括软件限位和电限位,俯仰轴限位机构包括电限位、软件限位和缓冲阻尼机械限位机构,稳定平台双轴在工作角范围内安全转动。
其三维视图如图2所示。
2稳定平台方位轴系设计其方位转动机构采用四点角接触的转盘轴承为主要承力结构,这种结构形式承载能力大、刚度好、精度高[3]。
为保证光电编码器能够可靠良好地工作,在光电编码器安装轴与底座安装有一对P4级精度的角接触球轴承,保证光电编码器安装处的变形量满足工作要求;陀螺安装在方位旋转部分;俯仰轴电器电路电缆通过滑环传输到底座。
方位轴设计有基准平台,为系统提供方位、俯仰角度基准,平台平面度好,并通过加工和装调保证台面与安装基座的平行度要求;在轴系的相对运动部分设计了安装O 如图3、图4所示。
www�ele169�com | 47信息工程硬件电路结构以及软件控制算法设计。
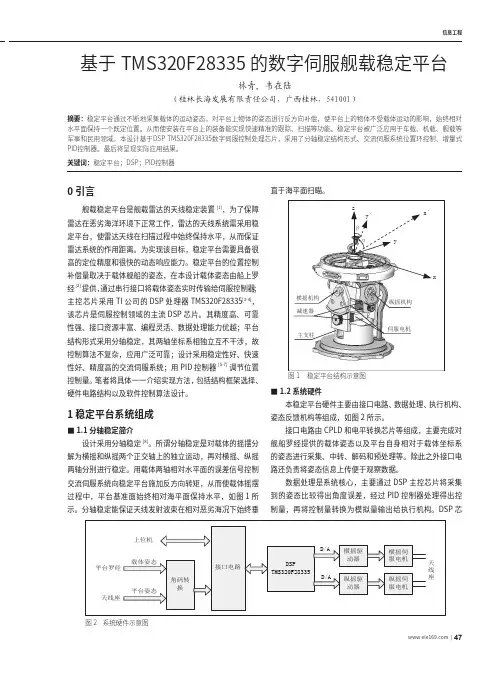
1 稳定平台系统组成■1.1 分轴稳定简介设计采用分轴稳定[8]。
所谓分轴稳定是对载体的摇摆分解为横摇和纵摇两个正交轴上的独立运动,再对横摇、纵摇两轴分别进行稳定。
用载体两轴相对水平面的误差信号控制交流伺服系统向稳定平台施加反方向转矩,从而使载体摇摆过程中,平台基准面始终相对海平面保持水平,如图1所主支柱减速器横摇机构纵摇机构伺服电机yα■1.2 系统硬件本稳定平台硬件主要由接口电路、数据处理、执行机构、姿态反馈机构等组成,如图2所示。
接口电路由CPLD 和电平转换芯片等组成,主要完成对舰船罗经提供的载体姿态以及平台自身相对于载体坐标系的姿态进行采集、中转、解码和预处理等。
除此之外接口电路还负责将姿态信息上传便于观察数据。
数据处理是系统核心,主要通过DSP 主控芯片将采集到的姿态比较得出角度误差,经过PID 控制器处理得出控芯林青,韦在陆(桂林长海发展有限责任公司,广西桂林,541001)摘要:稳定平台通过不断地采集载体的运动姿态,对平台上物体的姿态进行反方向补偿,使平台上的物体不受载体运动的影响,始终相对水平面保持一个既定位置。
从而使安装在平台上的装备能实现快速精准的跟踪、扫描等功能。
稳定平台被广泛应用于车载、机载、舰载等军事和民用领域。
本设计基于DSP TMS320F28335数字伺服控制处理芯片,采用了分轴稳定结构形式、交流伺服系统位置环控制、增量式PID控制器。
最后将呈现实际应用结果。
关键词:稳定平台;DSP;PID控制器48 | 电子制作 2020年12月PID 控制器基本的思想就是将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,用该控制量对被控对象进行控制。
其中比例环节成比例地反应控制系统的偏差信号,保证系统的快速性;积分环节主要用于消除静态误差,提高系统的置位精度;微分环节能反映偏差信号的变化趋势,并在偏差信号变得过大或过小之前,在系统中提前引入一个修正信号,从而加快系统的动作速度,缩短调节时间。
计算机测量与控制.2017.25(7) 犆狅犿狆狌狋犲狉犕犲犪狊狌狉犲犿犲狀狋牔犆狅狀狋狉狅犾 ·51 ·收稿日期:20170118; 修回日期:20170221。
作者简介:段志国(1992),男,江苏句容人,硕士研究生,主要从事嵌入式伺服系统方向的研究。
李 军(1970),男,博士,教授,主要从事伺服系统及其相关测控技术方向的研究。
文章编号:16714598(2017)07005104 DOI:10.16526/j.cnki.11-4762/tp.2017.07.013 中图分类号:TP206.1文献标识码:A基于嵌入式的伺服综合测控平台的设计段志国1,赵 岩2,李 军1,周剑波1(1.南京理工大学自动化学院,南京 210094;2.人民解放军92941部队94分队,辽宁葫芦岛 125001)摘要:基于嵌入式技术,设计了一套集控制、测试和分析于一体的伺服综合测控平台;该平台采用集散式结构,在硬件上提供了多种通信与测控接口,软件上以Linux嵌入式操作系统和Windows系统为基础,提供了友好的人机交互界面;可以根据现场状况工作在便携的单机模式或者功能完备的联机模式;平台同时为网络型伺服系统预留了网络接口,有很好的通用性和可扩展性等优点;经测试,该平台操作便捷,运行稳定,可用于多种类伺服系统的测控分析。
关键词:嵌入式;伺服测控系统;集散式结构;通用性犇犲狊犻犵狀狅犳犐狀狋犲犵狉犪狋犲犱犜犲狊狋犻狀犵犪狀犱犆狅狀狋狉狅犾犘犾犪狋犳狅狉犿犳狅狉犛犲狉狏狅犛狔狊狋犲犿犅犪狊犲犱狅狀犈犿犫犲犱犱犲犱犜犲犮犺狀狅犾狅犵狔DuanZhiguo1,ZhaoYan2,LiJun1,ZhouJianbo1(1.SchoolofAutomation,NanjingUniversityofScienceandTechnology,Nanjing 210094,China;2.Unit92941ofPLA,Huludao 125001,China)犃犫狊狋狉犪犮狋:Basedontheembeddedtechnology,asetofintegratedtestingandcontrolplatformwhichincludesthefunctionsofcontrol,testandanalysisisdesignedforservosystem.Theplatformisdesignedwiththedistributedstructure.Intermsofhardware,itprovidesmultiplecommunicationandtestingports.Intermsofsoftware,itbasedontheLinuxembeddedoperatingsystemandWindowssystem,providingfriend lyhuman-computerinteractioninterface.Theplatformcanworkinthestand-alonemodewhichisportableorworkinthecombinedmodewhichhasthecompletefunctionsaccordingtothedifferentenvironment.Theplatformalsoprovidesthenetworkinterfaceforthenetworkservosystem.So,theplatformhastheadvantagesofgoodversatilityandexpansibility.Accordingtothetest,theplatformcanbeoperatedconven ientlyandrunningstably,anditcanbeusedfortheanalysisandcontrolofmanykindsofservosystems.犓犲狔狑狅狉犱狊:embedded;servosystem;distributedstructure;versatility0 引言伺服技术即高精度的跟踪与定位技术,随着伺服技术的不断发展和现代化生产规模的不断扩大,各行业对伺服系统的需求日益增大,并对其性能提出了更高的要求。
基于DSP的舰载搜索雷达稳定平台交流伺服系统的设计赵金锴;笪林荣
【期刊名称】《舰船电子对抗》
【年(卷),期】2006(29)4
【摘要】给出了一种基于DSP的舰载搜索雷达交流伺服控制系统的设计方法.采用高速数字信号处理芯片TMS320LF2407A作控制主体,交流变频器和交流无刷电机作驱动,采用先进的数字PID控制算法,组成全数字交流伺服系统,保证系统具有很高的精度、可靠的稳定性和良好的可扩展性.仿真试验表明该设计满足舰载雷达伺服控制系统的要求.
【总页数】5页(P50-53,79)
【作者】赵金锴;笪林荣
【作者单位】西安电子科技大学,西安,710071;船舶重工集团公司723所,扬
州,225001
【正文语种】中文
【中图分类】TN959.1+1;TM383.4+2
【相关文献】
1.基于DSP的舰载天线稳定平台伺服系统的设计与实现 [J], 喻冬梅
2.舰载搜索雷达稳定平台控制系统设计 [J], 程小平
3.基于数字平台罗经的舰载雷达大惯量伺服系统设计 [J], 李涛
4.舰载相控阵搜索雷达电子稳定平台的设计与实现 [J], 秦琨;张兢晶
5.舰载相控阵搜索雷达电子稳定平台的设计与实现 [J], 秦琨[1];张兢晶[1]
因版权原因,仅展示原文概要,查看原文内容请购买。