3.5 陀螺稳定平台
- 格式:pdf
- 大小:289.01 KB
- 文档页数:17
§3.3 陀螺稳定平台1、问题的提出如果能测量出沿直角坐标系三个轴的线运动和绕三个坐标轴的角运动,就可以确定出物体的运动状态。
飞机、舰船以及各种战略战术武器都用惯性导航、惯性制导系统测量出运载体的位置、速度及姿态等运动情况。
如测量线运动用加速度计,测量角运动用陀螺仪。
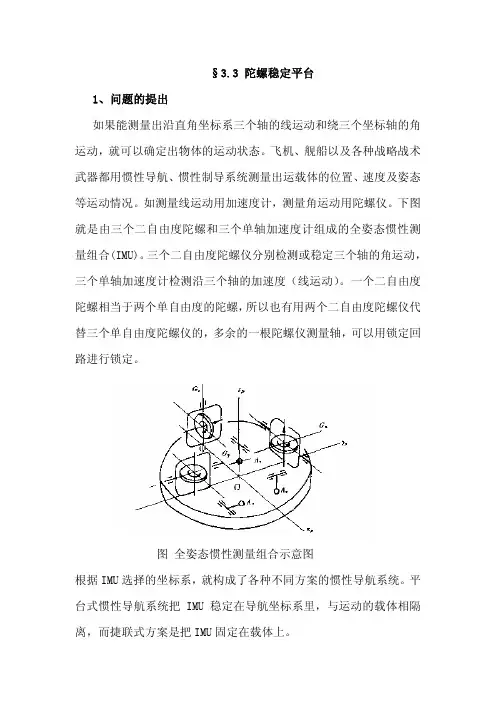
下图就是由三个二自由度陀螺和三个单轴加速度计组成的全姿态惯性测量组合(IMU)。
三个二自由度陀螺仪分别检测或稳定三个轴的角运动,三个单轴加速度计检测沿三个轴的加速度(线运动)。
一个二自由度陀螺相当于两个单自由度的陀螺,所以也有用两个二自由度陀螺仪代替三个单自由度陀螺仪的,多余的一根陀螺仪测量轴,可以用锁定回路进行锁定。
图 全姿态惯性测量组合示意图根据IMU选择的坐标系,就构成了各种不同方案的惯性导航系统。
平台式惯性导航系统把IMU稳定在导航坐标系里,与运动的载体相隔离,而捷联式方案是把IMU固定在载体上。
平台式惯导系统的做法:为了把IMU与载体相隔离,所以用一套框架系统把IMU支承起来(跟付科模型类似)。
使IMU成为在载体上不受载体运动与载体相隔离,所以用一套框架系统把IMU支承起来。
使IMU成为在载体上不受载体运动影响的—个物理平台。
图 三轴稳定平台的结构示意图在上图中A即是由陀螺和加速度计组成的测量部件IMU,是平台台体,平台用垂直的一个内环B支承起来,平台与内环间可以作360度的相对转动。
内环支承在水平的外环C中,内环连同平台可绕水平的X轴相对外环转动。
外环水平地支承在载体上,内外环及平台一起p可以绕水平的Y轴相对于载体转动。
在惯性平台稳定工作时,实际的p平台与载体的相对运动情况正好相反,载体无论绕方位轴转动还是横滚、俯仰,平台始终稳定跟踪某一导航坐标系。
平台三个支承轴的转角就可测量出载体的航向和水平姿态角。
把平台的外框轴沿载体的纵向轴安装,如图在船上的安装,则垂直的Z轴测航向,p X轴测纵摇,pY测横摇。
各支承轴上装上测角传感器就测量出了载体的航向和水平p姿态信号。

陀螺稳定平台(gyroscope-stabilized platform)是利用陀螺仪特性保持平台台体方位稳定的装置。
简称陀螺平台、惯性平台。
用来测量运动载体姿态,并为测量载体线加速度建立参考坐标系,或用于稳定载体上的某些设备。
它是导弹、航天器、飞机和舰船等的惯性制导系统和惯性导航系统的主要装置。
分类和组成:按结构形式可分为框架陀螺平台和浮球平台两种。
①框架陀螺平台。
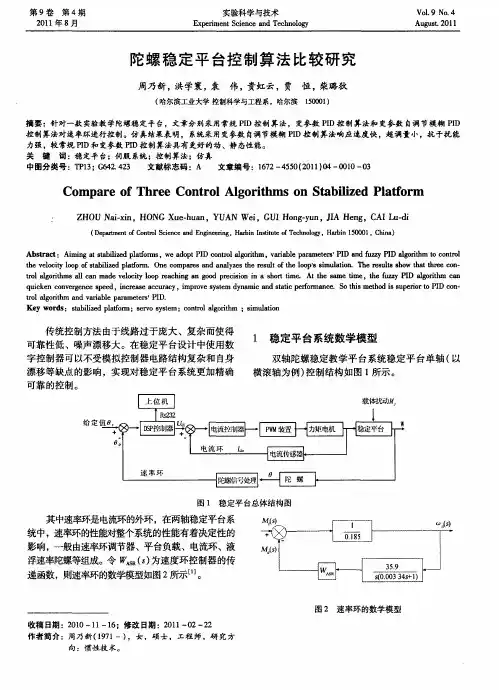
按其稳定的轴数,又分为单轴、双轴和三轴陀螺稳定平台(图1)。
它主要由平台台体、框架系统(即内框架、外框架和基座)、稳定系统(由平台台体上的陀螺仪、伺服放大器和框架轴上的力矩电机等构成,又称稳定回路、伺服回路)和初始对准系统(包括平台台体上的对准敏感元件、变换放大器和稳定系统)等组成。
陀螺稳定平台使用何种陀螺仪作为稳定敏感元件,就称为何种陀螺平台,如气浮陀螺平台、液浮陀螺平台、挠性陀螺平台和静电陀螺平台等。
②浮球平台。
又称高级惯性参考球平台。
主要由浮球(即内球)、球壳(即外球)、信号传输系统、姿态读出系统、加矩系统、温控系统、自动校准与对准系统和计算机接口装置等组成(图2)。
工作原理:三轴陀螺稳定平台有3条稳定系统通道,2条初始对准系统水平对准通道和1条方位对准通道。
其工作状态:一是陀螺平台不受载体运动和干扰力矩的影响,能使平台台体相对惯性空间保持方位稳定;二是在指令电流控制作用下,使平台台体按给定规律转动而跟踪某一参考坐标系进行稳定。
利用外部参考基准或平台台体上的对准敏感元件,可以实现初始对准。
三轴陀螺稳定平台应用较广泛。
浮球平台的浮球内装3个陀螺仪、3个加速度计和电子组件,浮球与球壳之间充以低粘性的碳氢液体,通常用电动涡轮液压泵提供连续流动悬浮液,将浮球悬浮在球壳中。
在球壳上安装有倍增器、倍减器、姿态读出器(激励带式感应传感器)、加速度计读出器、温控器与计算机接口装置等。
浮球中的陀螺仪、加速度计和姿态传感器信号传输系统,采用混频和多路传输,经电刷送到直流线路并在外电子组件中处理,然后由载波编码,通过接口送到计算机中。
《架空输电线路机巡光电吊舱技术规范》(试行)二〇一四年三月目次前言 (I)1范围 (1)2规范性引用文件 (1)3术语及定义 (1)4光电吊舱组成与分类 (2)5光电吊舱功能要求 (2)6光电吊舱性能指标要求 (4)7光电吊舱接口要求 (8)8检测试验与验收交付要求 (8)9标示、包装、运输和贮存要求 (10)10使用培训、维护和保养要求 (10)附录 (12)前言为规范架空输电线路有人直升机/无人机巡检用光电吊舱的要求,指导中国南方电网有限责任公司(以下简称“公司”)有人直升机/无人机巡检用光电吊舱的设备选型、试验验收、产品包装运输等方面的工作,依据国家和行业有关标准、规程和规范,特制定本规范。
本规范编写单位:南方电网科学研究院有限责任公司本规范主要起草人:陈晓、张巍、张贵峰、陈鹏、陈艳芳、杨鹤猛、张建民、吴新桥、王英洁、王国利、张拯宁、赵克、袁红卫、李超本规范由公司生产设备管理部提出并负责解释。
执行中的问题和意见,请及时反馈至公司生产设备管理部。
架空输电线路机巡光电吊舱技术规范(试行)1范围本技术规范(以下简称规范)适用于公司架空输电线路有人直升机、中大型无人机巡检用光电吊舱的选配。
本规范对光电吊舱的组成与分类、功能、性能指标、检测试验、验收交付、包装、运输、贮存、培训、维护和保养等做出了具体说明和要求。
2规范性引用文件下列文件中的条款通过本规范的引用而成为本规范的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本规范。
凡是不注日期的引用文件,其最新版本适用于本规范。
GB/T658 -2012 电子测量仪器通用规范GB /T 191 包装储运图示标志DL/T288 架空输电线路直升机巡视技术导则DL/T664 带电设备红外诊断应用规范DL/T345 带电设备紫外诊断技术应用导则QJ 2245-1992 电子仪器和设备防静电要求HB 6434-2001 机载电子设备接口设计基本要求HB 5662-1981 飞机设备电磁兼容要求及测试方法HB 6167-1989 民用飞机机载设备环境条件和试验方法GB 4208-2008 外壳防护等级(IP代码)RTCA/DO-160F Environmental Conditions and Test Procedures for Airborne EquipmentRTCA/DO-178C Software Considerations in Airborne Systems and Equipment Certification3术语及定义以下术语和定义适用于本标准。
一、实验目的1. 了解陀螺稳定平台的基本原理和组成;2. 掌握陀螺稳定平台的操作方法;3. 通过实验验证陀螺稳定平台在隔离载体扰动和跟踪目标方面的作用;4. 分析陀螺稳定平台在实际应用中的性能表现。
二、实验原理陀螺稳定平台是一种利用陀螺仪特性保持平台台体方位稳定的装置。
它主要由惯性平台、陀螺仪、控制器和执行机构等组成。
当载体发生运动时,陀螺仪能够测量出载体的角速度和角加速度,并将这些信息传递给控制器,控制器根据陀螺仪的输出信号控制执行机构,使平台台体保持稳定。
三、实验设备1. 陀螺稳定平台;2. 激光测距仪;3. 数字示波器;4. 数据采集卡;5. 计算机;6. 相关实验软件。
四、实验步骤1. 将陀螺稳定平台安装好,连接好相关设备;2. 启动计算机,打开实验软件;3. 将激光测距仪放置在实验场地,调整好位置;4. 打开实验软件,设置实验参数;5. 控制陀螺稳定平台在指定路径上运动;6. 通过激光测距仪测量陀螺稳定平台在运动过程中的实际位置;7. 将实验数据记录在实验报告中。
五、实验结果与分析1. 实验结果通过实验,我们得到了陀螺稳定平台在运动过程中的实际位置数据。
将实验数据与激光测距仪测量的实际位置进行比较,可以得出陀螺稳定平台在隔离载体扰动和跟踪目标方面的性能表现。
2. 分析(1)陀螺稳定平台在运动过程中,能够有效地隔离载体扰动,使平台台体保持稳定。
这表明陀螺稳定平台在实际应用中具有良好的稳定性。
(2)陀螺稳定平台在跟踪目标方面表现出较高的精度。
通过实验数据可以看出,陀螺稳定平台在跟踪目标过程中,实际位置与激光测距仪测量的实际位置基本一致。
(3)陀螺稳定平台的性能表现与实验参数设置有关。
在实际应用中,应根据具体情况调整实验参数,以获得最佳的实验效果。
六、结论本次实验验证了陀螺稳定平台在隔离载体扰动和跟踪目标方面的作用。
实验结果表明,陀螺稳定平台在实际应用中具有良好的稳定性和跟踪精度。
通过对实验数据的分析,我们可以得出以下结论:1. 陀螺稳定平台是一种有效的隔离载体扰动和跟踪目标的装置;2. 陀螺稳定平台的性能表现与实验参数设置有关;3. 陀螺稳定平台在实际应用中具有良好的应用前景。
第3章陀螺稳定平台3.1 概述3.2 陀螺稳定平台的构成方式3.3 双自由度陀螺构成单轴稳定平台的原理3.4* 三轴陀螺稳定平台3.5 本章小节13.1 概述陀螺具有定轴性和进动性。
定轴性是指转子轴具有相对惯性空间指向保持不变的能力。
进动性是指按照要求的规律相对惯性空间旋转的能力。
利用陀螺来控制被控对象的角运动。
控制角运动包含两个含义:一是隔离运载体的角运动对被控对象的角运动的影响;二是能使被控对象按指令要求的规律旋转,指向始终跟踪变2动着的方向。
陀螺稳定平台:以陀螺为敏感元件,能隔离基座的角运动并能使被控对象按指令旋转的机电控制系统称为陀螺稳定平台。
陀螺稳定平台包括:1、惯性平台(精度高,三轴)2、陀螺稳定装置(精度低,一般少于三轴)陀螺稳定平台的稳定作用是能自动产生卸荷力矩对消干扰力矩。
卸荷力矩分为两类1、陀螺力矩32、伺服力矩陀螺稳定平台的主要类型1、直接式陀螺稳定平台--干扰力矩由陀螺力矩对消2、间接式陀螺稳定平台--干扰力矩由伺服力矩对消3、指示式陀螺稳定平台--干扰力矩由伺服力矩对消4、动力式陀螺稳定平台--干扰力矩由伺服力矩和陀螺力矩对消(过渡过程中起作用)5、指示-动力式陀螺稳定平台--干扰力矩由伺服力矩和陀螺力矩对消(过渡过程中起作用,但作用很小)4陀螺稳定平台的基本功能:一是稳定功能,即对外界干扰起对消作用。
如基座角运动是一种外界干扰,在稳定平台与基座的轴承连接处将引起摩擦力矩作用在平台上,或由于几何约束关系台体被强制带动跟随基座一起旋转,稳定平台能自动产生卸荷力矩对消摩擦力矩,同时能产生适当的反旋转对消被基座带动的强制旋转;二是跟踪功能,即能跟踪指令,按要求的角速度旋转,确保平台的坐标轴指向要求的方位。
53.2 陀螺稳定平台的构成方式可由单自由度陀螺构成,也可由双自由度陀螺构成一个单自由度陀螺可以构成单轴陀螺稳定平台,稳定轴是单自由度陀螺的敏感轴(输入轴),即转子缺少转动自由度的那个轴。
第15卷第2期中国惯性技术学报V ol.15 No.2 2007年4月 Journal of Chinese Inertial Technology Apr. 2007文章编号:1005-6734(2007)02-0171-06三轴陀螺稳定平台控制系统设计与实现杨蒲,李奇(东南大学自动化研究所,南京 210096)摘要:针对高精度光电导引系统快速隔离扰动、稳定视轴的要求,设计了以速率陀螺为核心构成的三轴陀螺稳定平台。
结合某型号电视导引头设计过程,详细介绍了该三轴陀螺稳定平台的结构组成、主要元器件选型,以及软硬件实现。
分析了陀螺稳定平台的隔离扰动原理,设计了多闭环复合控制结构,给出了系统各组成部分的模型,合理简化后建立了系统数学模型,并按照频域分析法设计了控制算法。
对于陀螺信号噪声问题,设计了小波阈值滤波方法,有效地消除了反馈信号的噪声,提高了系统控制精度。
整机测试表明,该陀螺稳定平台满足了导引头系统设计指标要求,具有较高的跟踪精度;能够在实验室条件下,进行多种电视跟踪模拟实验,为实际设备的研制提供了真实有效的数据。
关键词:稳定平台;速率陀螺;DSP;伺服控制中图分类号:U666.1 文献标识码:ADesign and realization of control system for three-axisgyro stabilized platformYANG Pu, LI Qi(Research Institute of Automation, Southeast University, Nanjing 210096, China)Abstract: In view of the requirements of isolating disturbances and stabilizing optical axis of high-precision photoelectric guidance system, a three-axis stabilized platform system centering on the rate gyro was designed. Based on the design process of a TV guidance header, the mechanical structure constitution, main components selection and software and hardware realization were introduced. The disturbance-isolation theory of the stabilized platform was analyzed and the control structure including multiple closed-loops was designed. Each part of the control system was modeled, and then by simplifying their equations, the whole system model was founded and the control method was designed according to the frequency domain analysis method. To eliminate the gyro’s noise signal, a wavelet threshold filter was proposed, which can depress the feedback noise signal effectively and improve the control precision. The testing results on the equipment show that the gyro stabilized platform system meets the presetting performance demands and has higher tracking precision. Many kinds of TV tracking simulation experiments can be implemented in the laboratory, and this provides real and effective data for the development of practical equipments.Key words: stabilized platform; rate gyro; DSP; servo control电视成像导引设备作为惯导武器的核心部分,对武器命中目标的精度起着十分重要的作用。
稳定平台中通用陀螺数据采集处理系统张智永;周晓尧;张连超【期刊名称】《兵工自动化》【年(卷),期】2011(30)2【摘要】为提高稳定平台的性能,针对平台中各种类型陀螺高速度、高精度、宽动态范围的设计指标要求,研制了一种通用数据采集处理系统.在详细分析动力调谐、光纤和微机械陀螺典型型号性能参数指标的基础上,提出了系统的设计指标要求,选择8通道24位∑-?高精度模数转换器ADS1278和32位数字信号处理器TMS320F2812,设计实现系统的硬件电路,编写了相关的软件程序,并进行了实验验证.实验表明:系统的转台测试数据与陀螺出厂标定的性能参数之间,测量误差小于1%,完全满足稳定平台中陀螺的应用要求.%In order to improve the performance of stabilized platform, research and develop a data acquisition and processing system for various gyros in stabilized platform to achieve high speed, high accuracy and wide dynamic range.The system design requirements are proposed based on detail analysis of several typical gyros, such as dynamically tuned gyro (DTG), fiber optical gyro (FOG) and MEMS gyro. In the meanwhile, 8 channels and 24 bitsΣ-Δ analog-digital converter ADS1278 and 32bits digital signal processor TMS320F2812 are chosen to design and realization the hardware circuits, and also the software program is compiled. The experiment result shows that the errors of data acquisition and processing system are less than 1%, which can meet the requirements of stabilized platform gyros.【总页数】4页(P55-57,79)【作者】张智永;周晓尧;张连超【作者单位】国防科学技术大学,机电工程与自动化学院,长沙,410073;国防科学技术大学,机电工程与自动化学院,长沙,410073;国防科学技术大学,机电工程与自动化学院,长沙,410073【正文语种】中文【中图分类】TP274【相关文献】1.光纤陀螺在机载光电稳定平台中的应用 [J], 余珊珊;夏军2.基于ARM+FPGA的微陀螺仪数据采集处理系统设计 [J], 程燕胜;宗群;吴宏硕3.自适应强跟踪卡尔曼滤波在陀螺稳定平台中的应用 [J], 宋康宁;丛爽;邓科;尚伟伟;孔德杰;沈宏海4.一种稳定平台中陀螺漂移滤波算法的设计与实现 [J], 王小英;林志;连军政5.一种复合控制器在陀螺稳定平台中的应用 [J], 魏贵玲;王斌;邓劲松;张勋;楚波因版权原因,仅展示原文概要,查看原文内容请购买。
惯性稳定平台的稳定条件与陀螺安装位置
李勇建
【期刊名称】《压电与声光》
【年(卷),期】2011(33)2
【摘要】稳定平台具有广泛的用途和重要的作用,稳定条件与陀螺是惯性稳定平台稳定控制的关键。
通过建立惯性坐标系对载体运动分析,提出了惯性稳定平台稳定控制的条件,针对双轴稳定平台系统研究了陀螺的4种安装位置与相应的补偿角速度,通过对惯性稳定特性分析,给出了陀螺最优安装位置。
对陀螺漂移与平台稳定精度进行了阐述,对稳定平台系统设计提出了几点的建议。
【总页数】4页(P203-206)
【关键词】稳定平台;载体运动;稳定条件;陀螺;安装位置
【作者】李勇建
【作者单位】中国电子科技集团公司第26研究所
【正文语种】中文
【中图分类】TM302
【相关文献】
1.航空光电成像平台角位置陀螺和角速率陀螺的稳定效果分析 [J], 沈宏海;刘晶红;张葆;戴明;贾平;魏忠和;熊经武
2.光纤陀螺在车载惯性平台稳定回路中的仿真 [J], 刘义;吴彦林;蒿俊晓
3.一种陀螺稳定平台瞄准线漂移的惯性补偿方法 [J], 薛媛元;陈文建;康婷颋;陈颖;
张夏疆;杨远成
4.使用位置环的惯性稳定系统中陀螺漂移误差软件修正方法 [J], 彭富伦;曹晖;严宁;姜旭;徐姣杰
5.光纤陀螺惯性平台的稳定回路控制 [J], 徐白描;魏宗康;彭迪
因版权原因,仅展示原文概要,查看原文内容请购买。