自动变速器 辛普森式传动比计算
- 格式:pdf
- 大小:508.58 KB
- 文档页数:23
自动变速器辛普森行星齿轮典型结构速比分析刘志忠(河北交通职业技术学院汽车工程系)【摘要】汽车自动变速器行星齿轮的基本结构之一为辛普森(Simpson)结构。
TOYOTA A40DE自动变速器行星齿轮机构,齿轮机构由共太阳轮式辛普森齿系和超速行星排组成,可实现4个前进速比。
TOYOTA U340 自动变速器行星齿轮机构为独立太阳轮式,可实现4个前进速比。
汽车自动变速器行星齿轮的基本结构之一为辛普森(Simpson)结构。
辛普森齿轮传动机构的结构特点:将两个行星排中一个行星排的齿圈与另一个行星排的行星架连结,具体结构有两种,分别为:共太阳轮式和独立太阳轮式。
自动变速器通过换挡执行元件:制动器、离合器、单向轮的动作,实现行星齿轮机构的速比变换。
制动器、离合器是液压执行元件。
单向轮是机械动作元件,采用滚柱式、楔块式等结构,工作中有单向锁止和单向自由两种状态,称为单向制动器或单向离合器。
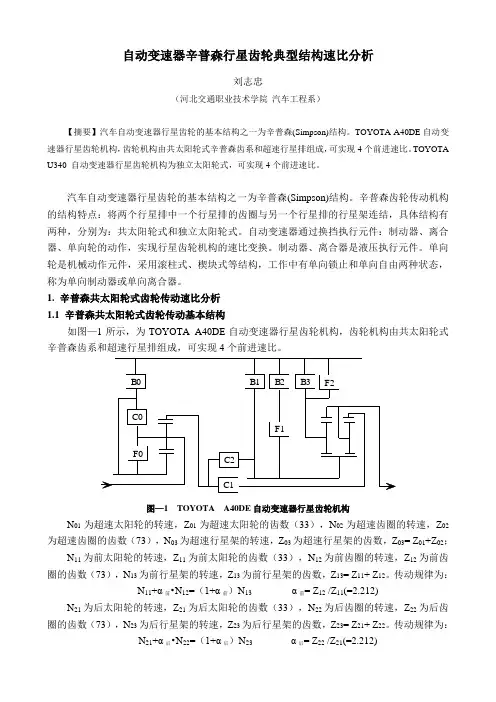
1. 辛普森共太阳轮式齿轮传动速比分析1.1 辛普森共太阳轮式齿轮传动基本结构如图—1所示,为TOYOTA A40DE自动变速器行星齿轮机构,齿轮机构由共太阳轮式辛普森齿系和超速行星排组成,可实现4个前进速比。
B0C0F0C2C1B1B2B3F1F2图—1 TOYOTA A40DE自动变速器行星齿轮机构N01为超速太阳轮的转速,Z01为超速太阳轮的齿数(33),N02为超速齿圈的转速,Z02为超速齿圈的齿数(73),N03为超速行星架的转速,Z03为超速行星架的齿数,Z03= Z01+Z02;N11为前太阳轮的转速,Z11为前太阳轮的齿数(33),N12为前齿圈的转速,Z12为前齿圈的齿数(73),N13为前行星架的转速,Z13为前行星架的齿数,Z13= Z11+ Z12。
传动规律为:N11+α前•N12=(1+α前)N13α前= Z12 /Z11(=2.212) N21为后太阳轮的转速,Z21为后太阳轮的齿数(33),N22为后齿圈的转速,Z22为后齿圈的齿数(73),N23为后行星架的转速,Z23为后行星架的齿数,Z23= Z21+ Z22。
速度矢量法的辛普森式行星齿轮变速器传动比分析本文从网络收集而来,上传到平台为了帮到更多的人,如果您需要使用本文档,请点击下载按钮下载本文档(有偿下载),另外祝您生活愉快,工作顺利,万事如意!0引言随着当今科技的发展,越来越多的轿车采用了液力自动变速器。
它通常由液力变矩器、行星齿轮变速器和液压操纵及控制系统三部分组成。
目前常用于轿车自动变速器的两种行星齿轮装置是辛普森( Simpson)式行星齿轮变速器和拉维娜式行星齿轮变速器。
其中辛普森式具有结构简单紧密、传动效率高、工艺性好、制造费用低、换档平稳、操纵性能好等一系列优点,因此获得了广泛的应用。
相比解析法、图论法以及杠杆法等其它行星齿轮机构分析方法,瞬心-速度矢量法具有形象直观,分析简便的优点。
只要根据约束关系,找到各行星排行星轮的瞬心,在确定输入或输出元件转速的情况下,即可得出所有元件的转动情况和整个机构的转动比大小。
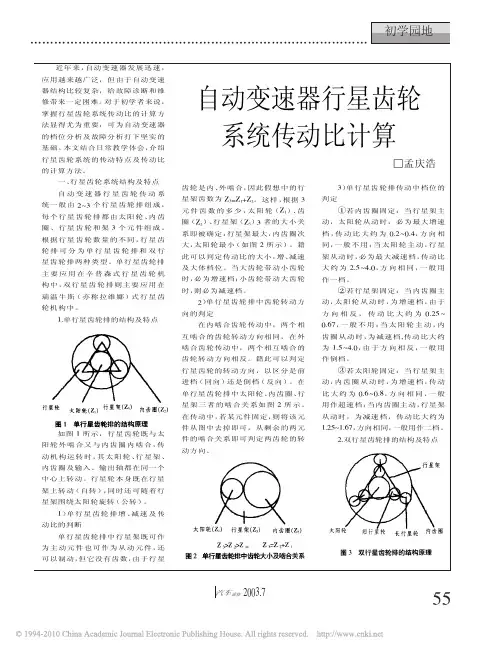
1单行星轮行星排的简化运用瞬心-速度矢量法绘制行星齿轮机构线速度矢量图的关键是首先必须确定等速点和零速点。
等速点即两构件线速度相同的点,零速点即为各构件上线速度为零的点。
1 (a)所示单行星轮行星排共有3个等速点,1个零速点。
其中A为行星轮与齿圈的啮合点,B为行星轮中心,C为行星轮与太阳轮的啮合点;U为太阳轮的回转中心,同时也是齿圈和行星架的回转中心。
为便于分析,将这4点投影到(b)所示直线上。
A,B,C 3点的速度方向均垂直于直线OA,分别代表齿圈、行星架和太阳轮的转速。
2辛普森式行星齿轮变速器的结构特点及瞬心-速度矢量法的基本原理辛普森式齿轮变速器的特点是:双排结构,前后两排均为单行星轮行星排;前排行星架与后排齿圈(即前架后圈)或前排齿圈与后排行星架(即前圈后架)连为一体,通常作为固定输出元件;前后两排共用太阳轮。
1)按一定比例画出行星排简图,先从有固定元件的行星排分析,以便确定行星轮的瞬心。
其中,瞬心的位置一定位于OA线或其延长线上。
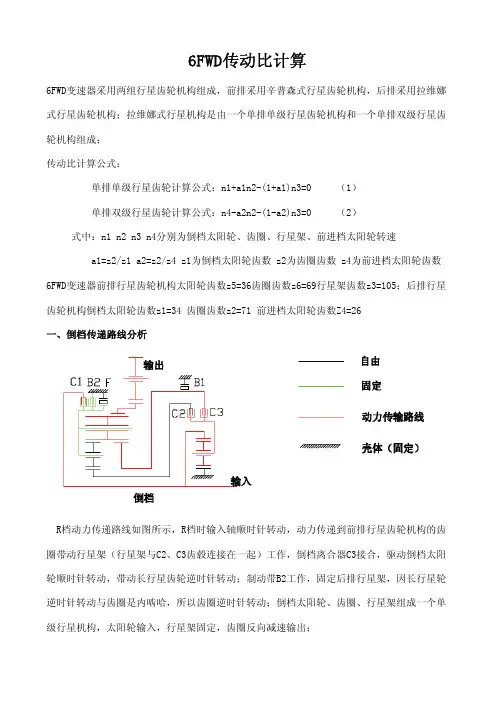
6FWD传动比计算6FWD变速器采用两组行星齿轮机构组成,前排采用辛普森式行星齿轮机构,后排采用拉维娜式行星齿轮机构;拉维娜式行星机构是由一个单排单级行星齿轮机构和一个单排双级行星齿轮机构组成;传动比计算公式:单排单级行星齿轮计算公式:n1+a1n2-(1+a1)n3=0 (1)单排双级行星齿轮计算公式:n4-a2n2-(1-a2)n3=0 (2)式中:n1 n2 n3 n4分别为倒档太阳轮、齿圈、行星架、前进档太阳轮转速a1=z2/z1 a2=z2/z4 z1为倒档太阳轮齿数 z2为齿圈齿数 z4为前进档太阳轮齿数6FWD变速器前排行星齿轮机构太阳轮齿数z5=36齿圈齿数z6=69行星架齿数z3=105;后排行星齿轮机构倒档太阳轮齿数z1=34 齿圈齿数z2=71 前进档太阳轮齿数Z4=26一、倒档传递路线分析R档动力传递路线如图所示,R档时输入轴顺时针转动,动力传递到前排行星齿轮机构的齿圈带动行星架(行星架与C2、C3齿毂连接在一起)工作,倒档离合器C3接合,驱动倒档太阳轮顺时针转动,带动长行星齿轮逆时针转动;制动带B2工作,固定后排行星架,因长行星轮逆时针转动与齿圈是内啮哈,所以齿圈逆时针转动;倒档太阳轮、齿圈、行星架组成一个单级行星机构,太阳轮输入,行星架固定,齿圈反向减速输出;倒档传动比计算:R档时,倒档太阳轮的动力是经前排行星齿轮机构减速输入;后排行星机构以一个单级行星机构的方式工作,行星架固定,倒档太阳轮输入,齿圈输出;行星架固定n3转速为O,假设输入轴输入速度为1,倒档太阳轮输入速度n1=z6/z5=69/105=0.6571引用公式(1)n1+a1n2-(1+a1)n3=0a1=z2/z1=71/34=2.088 a2=z2/z4=71/26=2.731代入公式:n1+a1n2+(1+a1)n3=0 n1+a1n2=0 0.6571=-2.088n2 n2=-0.6571/2.088=-0.3147 (负号表示齿圈转动方向)传动比i=1/n2=1/0.3147=3.178二、手动一档传递路线分析手动一档动力传递路线如图所示,手动一档时输入轴顺时针转动,动力传递到前排行星齿轮机构的齿圈带动行星架(行星架与C2、C3齿毂连接在一起)工作,前进档离合器C2接合,驱动前进档太阳顺时针转动,带动短行星齿轮逆时针转动,短行星齿轮带动长行星齿轮顺时针转动;单向离合器锁止,防止后排行星架逆时针转动,同时制动带B2工作,固定后排行星架,因长行星齿轮顺时针转动与齿圈内啮合,所以齿圈顺时针转动;前进档太阳轮、长行星齿轮、短行星齿轮、齿圈、行星架组成一个双级行星机构;前进档太阳轮输入、行星架固定、齿圈减速输出;因有B2固定行星架,在手动一档时,有发动机制动;双级行星机构的方式工作,行星架固定,前进档太阳轮输入,齿圈输出;行星架固定n3转速为O,假设输入轴输入速度为1,前进档太阳轮输入速度n4=z6/z5=69/105=0.6571;引用公式(2) n4-a2n2-(1-a2)n3=0a1=z2/z1=71/34=2.088 a2=z2/z4=71/26=2.731代入公式: n4-a2n2+(1-a2)n3=00.657-2.731n2=0n2=0.6571/2.731=0.2406传动比i:1/n2=1/0.2406=4.156三、自动一档传递路线分析自动一档动力传递路线如图所示,自动一档时输入轴顺时针转动,动力传递到前排行星齿轮机构的齿圈带动行星架(行星架与C2、C3齿毂连接在一起)工作,前进档离合器C2接合,驱动前进档太阳顺时针转动,带动短行星齿轮逆时针转动,短行星齿轮带动长行星齿轮顺时针转动;单向离合器锁止,防止后排行星架逆时针转动,因长行星齿轮顺时针转动与齿圈内啮合,所以齿圈顺时针转动;前进档太阳轮、长行星齿轮、短行星齿轮、齿圈、行星架组成一个双级行星机构;前进档太阳轮输入、行星架固定、齿圈顺时针减速输出,因单向离合器是动力传递不可缺少的条件,当反向传递动力时,它会超越滑转,故在自动一档没有发动机制动;双级行星机构的方式工作,行星架固定,前进档太阳轮输入,齿圈输出;行星架固定n3转速为O,假设输入轴输入速度为1,前进档太阳轮输入速度n4=z6/z5=69/105=0.6571;引用公式(2) n4-a2n2-(1-a2)n3=0a1=z2/z1=71/34=2.088 a2=z2/z4=71/26=2.731代入公式: n4-a2n2-(1-a2)n3=00.657-2.731n2=0n2=0.6571/2.731=0.2406传动比i:1/n2=1/0.2406=4.156四、自动二档传递路线分析自动二档动力传递路线如图所示,自动二档时输入轴顺时针转动,动力传递到前排行星齿轮机构的齿圈带动行星架(行星架与C2、C3齿毂连接在一起)工作,前进档离合器C2接合,驱动前进档太阳顺时针转动,带动短行星齿轮逆时针转动,短行星齿轮带动长行星齿轮顺时针转动;制动器B1工作,固定倒档太阳轮,则长行星齿轮带动后行星架绕倒档太阳轮爬行;长行星齿轮顺时针转动与齿圈啮合,所以齿圈顺时针转动输出;前进档太阳轮、长行星齿轮、短行星齿轮、齿圈、行星架组成一个双级行星机构和一个单级行星机构;前进档太阳轮输入、倒档太阳轮固定、行星架自由、齿圈输出;因无单向离合器参与动力传递,故有发动机制动;自动二档传动比计算:单级行星机构和一个双级行星机构工作,前进档太阳轮输入、倒档太阳轮固定、行星架自由、齿圈输出,倒档太阳轮固定n1速度为0,假设输入轴输入速度为1,前进档太阳轮输入速度n4=z6/z5=69/105=0.6571;引用公式 (1) n1+a1n2-(1+a1)n3=0(2) n4-a2n2-(1-a2)n3=0a1=z2/z1=71/34=2.088 a2=z2/z4=71/26=2.731代入公式: n1+a1n2-(1+a1)n3=0a1n2-(1+a1)n3=0n3=2.088n2/3.088将n3代入公式(2)n4-a2n2-(1-a2)n3=0 n4-a2n2-(1-a2)*2.088n2/3.088=00.6571-2.731n2-(1-2.731)*2.088n2/3.088=0传动比i=1/n2=1/0.421=2.375五、自动三档传递路线分析自动三档动力传递路线如图所示,自动三档时输入轴顺时针转动,动力传递到前排行星齿轮机构齿圈上带动行星架(行星架与C2、C3齿毂连接在一起)工作,前进档离合器C2接合,驱动前进档太阳顺时针转动,带动短行星齿轮逆时针转动,短行星齿轮带动长行星齿轮顺时,转动;倒档离合器C3接合,驱动倒档太阳轮顺时针转动,带动长行星齿轮逆时针转动;两路合器参与动力传递,故有发动机制动;自动三档传动比计算:自动三档时,前进档太阳轮的动力是经前排行星齿轮机构减速输入;后排行星机构是直接传动,所以三档传动比为前排行星机构的传动比;传动比i=z3/z6=105/69=1.522六、自动四档传递路线分析自动四档动力传递路线如图所示,自动四档时输入轴顺时针转动,动力分两路传递到后排行星架;一路动力由输入轴传递到前排行星齿轮机构齿圈带动行星架(行星架与C2、C3齿毂连接在一起)工作,前进档离合器C2接合,驱动前进档太阳顺时针转动,带动短行星齿轮逆时针转动,短行星齿轮带动长行星齿轮顺时针转动;另一路动力由输入轴传递到超速轴,超速离合器C1接合,带动后排行星架顺时针转动,齿圈顺时针增速输出;前进档太阳轮、齿圈、行星架组成一个双级行星机构,因无单向离合器参与动力传递,故有发动机制动;自动四档传动比计算:自动四档时,前进档太阳轮的动力是经前排行星齿轮机构减速输入;后排行星机构以一个双级行星机构的方式工作,行星架输入,前进档太阳轮输入,齿圈输出;假设输入轴输入速度为1,前进档太阳轮输入速度n4=z6/z5=69/105=0.6571;引用公式(2) n4-a2n2-(1-a2)n3=0代入公式: n4-a2n2-(1-a2)n3=0 0.6571-2.731n2-(1-2.731)=0n2=2.3881/2.731=0.874传动比i=1/n2=1/0.874=1.144七、自动五档传递路线分析自动五档动力传递路线如图所示,自动五档时输入轴顺时针转动,动力分两路传递到后排行星架;一路动力由输入轴传递到前排行星齿轮机构齿圈带动行星架(行星架与C2、C3齿毂连接在一起)工作;倒档离合器C3接合,驱动倒档太阳轮顺时针转动,带动长行星齿轮逆时针转动;另一路动力由输入轴传递到超速轴,超速离合器C1接合,带动后排行星架顺时针转动,齿圈顺时针增速输出;倒档太阳轮、齿圈、行星架组成一个单级行星机构;因无单向离合器参与工作,故有发动机制动;自动五档传动比计算:自动五档时,倒档太阳轮的动力是经前排行星齿轮机构减速输入;后排行星机构以一个单级行星机构的方式工作,行星架输入,倒档太阳轮输入,齿圈输出;假设输入轴输入速度为1,前进档太阳轮输入速度n1=z6/z5=69/105=0.6571;引用公式 (1) n1+a1n2-(1+a1)n3=0a1=z2/z1=71/34=2.088 a2=z2/z4=71/26=2.731代入公式: n1+a1n2-(1+a1)n3=0 0.6571+2.088n2-(1+2.088)=0传动比i=1/n2=1/1.164=0.859八、自动六档传递路线分析自动六档动力传递路线如图所示,自动六档时输入轴顺时针转动,动力由输入轴传递到器C1接合,带动后排行星架顺时针转动;制动器B1工作,固定倒档太阳轮,则后行星架绕倒超速轴,超速离合档太阳轮转动,齿圈顺时针增速输出;倒档太阳轮、齿圈、行星架组成一个单级行星机构;因无单向离合器参与工作,故有发动机制动;自动六档传动比计算:自动六档时,行星架的动力是由超速轴直接输入,所以行星架的转速等于输入轴转数;后排行星机构以一个单级行星机构的方式工作,行星架输入,倒档太阳轮固定,齿圈输出;倒档太阳轮固定转速为0,假设输入轴输入速度为1;引用公式 (1) n1+a1n2-(1+a1)n3=0a1=z2/z1=71/34=2.088 a2=z2/z4=71/26=2.731代入公式: n1+a1n2-(1+a1)n3=0a1n2-(1+a1)n3=0n2=(1+a1)/a1 n2=(1+2.088)/2.088=1.4789传动比i=1/n2=1/1.4789=0.676。

辛普森式自动变速器结构原理及各挡位传动路线辛普森式自动变速器结构原理及各挡位传动路线辛普森式自动变速器结构原理及各挡位传动路线不同车型自动变速器在结构上往往有很大差异,主要表现在:前进挡的挡数不同,离合器,制动器及单向超越离合器的数目和布置方式不同,所采用的行星齿轮机构的类型不同.前进挡的数目越多,行星齿轮变速系统中的离合器,制动器及单向超越离合器的数目就越多.离合器,制动器,单向超越离合器的布置方式主要取决于行星齿轮变速系统前进挡的挡数及所采用的行星齿轮机构的类型.轿车自动变速器所采用的行星齿轮机构的类型主要有2类,即辛普森式和拉维萘赫式行星齿轮机构. 辛普森式行星齿轮机构由2个内啮合式单排行星齿轮机构组合而成, 庞成立其结构特点是:前后2个行星排的太阳轮连接为一体,称为前后太阳轮组件;前一个行星排的行星架和后一个行星排的齿圈连接为一体,称为前行星架和后齿圈组件;输出轴通常与前行星架和后齿圈组件连接.经过上述的组合后,该机构成为一种具有4个独立元件的行星齿轮机构.这4个独立元件是:前齿圈,前后太阳轮组件,后行星架,前行星架和后齿圈组件.根据前进挡的挡数不同,可将行星齿变速系统分为3挡行星齿轮变速系统和4挡行星齿轮变速系统2种.1.辛普森式3挡行星齿轮变速系统的结构和工作原理.(1)行星齿轮变速系统的结构:a)结构b)换挡执行元件的布置l一输入轴2一倒挡及高挡离合器毂3一前进离合器毂和倒挡及高档离合器毂4一前进离合器毂和前齿圈5一前行星架6一前后太阳轮组件7一后行星架和低挡及倒挡制动器毂8一输出轴C1一倒挡及高挡离合器c2一前进离合器B1—2挡制动器B2一低挡及倒挡制动器Fl一低挡单向超越离合器图1行星齿轮变速系统结构及元件布置图如图1(a图为结构图,b图为元件布置图)所示,行星齿轮机构中设置了5个换挡执行元件(2个离合器,2个制动器和1个单向超越离合器),使该系统成为一个具有3个前进挡和1个倒挡的行星齿轮变速系统.离合器C1用于连接输入轴和前后太阳轮组件, 离合器C2用于连接输入轴和前齿圈,制动器B1用于固定前后太阳轮组件, 制动器B2和单向超越离合器F1都是用于固定后行星架.5个换挡执行元件在各挡位的工作情况如表1所示.由表1中可知,当行星齿轮变速系统处于停车挡和空挡之外的任何一个挡位时,5个换挡执行元件中都有2个处于表1辛普森3挡行星齿轮变速系统换挡执行元件工作情况操纵手挡位换执仃兀件柄位置ClC2BlB2F1 1挡0 D2挡0O3挡OOR倒挡0OS.L或1档OO2,12挡0O注:0一接合,制动或锁止. 工作状态(接合,制动或锁止),其余 3个不工作(分离,释放或自由状态).处于工作状态的2个换挡执行元件中至少有一个是离合器Cl或 C2,以便使输入轴与行星排连接.当变速器处于任一前进挡时,离合器 C2都处于接合状态,此时输入轴与行星齿轮机构的前齿圈接合,使前齿圈成为主动件,因此离合器C2也称为前进离合器.倒挡时,离合器C1接合,C2分离,此时输入轴与行星齿轮机构的前后太阳轮组件接合,使前后太阳轮组件成为主动件;另外,离合器C1在3挡(直接挡)时也接合,因此,离合器C1也称为倒挡及高挡离合器.制动器B1仅在2挡才工作,称为2挡制动器.制动器B2在1挡和倒挡时都工作,因此称为低挡及倒挡制动器.由此可知,换挡执行元件的不同工作组合决定了行星齿轮变速系统的传动方向和传动比,从而决定了行星齿轮变速系统所处的挡位. (2)行星齿轮变速系统各挡的传动路线: ?1挡:如图2所示,此时前进离合器C2接合,使输入轴和前齿圈连接:同时单向超越离合器F1处于自锁状态,后行星架被固定.来自液力变矩器的发动机动力经输入轴,前汽车维修2011.6???1一输入轴2一前进离合器c23一倒挡及高挡离合器Cl4—2挡制动器B15一前齿圈 6,前行星轮7一前行星架8一输出轴9一前后太阳轮组件10一后行星架ll一后行星轮 l2一低挡及倒挡制动器B213一低挡单向超越离合器F1l4一后齿圈图21挡路线-倒挡及 1一输入轴2一前进离合器C23高挡离合器C14—2档制动器B15一前齿圈6一前行星轮7一前行星架8一输出轴9一前后太阳轮组件lO一后行星架 ll一后行星轮12一低挡及倒挡制动器B2 13一低挡单向超越离合器F114一后齿圈图43挡路线???a)前行星排b)后行星排l一输入轴2一前进离合器C23-倒挡及高挡离合器Cl4—2挡制动器B15一前齿圈6一前行星轮7一前行星架8一输出轴9一前后太阳轮组件1O一后行星架11一后行星轮 12一低挡及倒挡制动器B2l3一低挡单向超越离合器F114一后齿圈图32挡路线进离合器C2传给前齿圈,使前齿圈朝顺时针方向旋转.在前行星排中,前行星齿轮在前齿圈的驱动下一方面朝顺时针方向公转,带动前行星架朝顺时针方向转动,另一方面作顺时针方向的自转,并带动前后太阳轮组件朝逆时针方向转动;在后行星排中,后行星轮在后太阳轮的驱动下朝顺时针方向作自转时,对后行星架产生一个逆时针方向的力矩,而低挡单向超越离合器FI对后行星架在逆时针方向具 46汽车维修2011.6a)前行星排b)后行星排1一输入轴2一前进离合器C23-倒挡及高挡离合器C14—2挡制动器B15一前齿圈6一前行星轮7一前行星架8一输出轴9一前后太阳轮组件10一后行星架11一后行星轮12一低挡及倒挡制动器B2 13一低挡单向超越离合器F114一后齿圈图5倒挡路线有锁止作用,因此后行星架固定不动, 使后齿圈在后行星轮的驱动下朝顺时针方向转动.因此,在前进1挡时,由输入轴传给行星齿轮机构的动力是经过前后行星排同时传给前行星架和后齿圈组件,再传给与之相连接的输出轴,从而完成动力输出的.?2挡:如图3所示,前进离合器C2和2挡制动器B1同时工作. 此时输入轴仍经前进离合器C2和前齿圈连接,同时前后太阳轮组件被2 挡制动器B1固定.发动机动力经液力变矩器和行星齿轮变速系统的输入轴传给前齿圈,使其朝顺时针方向转动.由于前太阳轮转速为0,因此前行星轮在前齿圈的驱动下一方面朝顺时针方向作自转,另,方面朝顺时针方向作公转,同时带动前行星架及输出轴朝顺时针方向转动.此时后行星排处于自由状态,后行星轮在后齿圈的驱动下朝顺时针方向一边自转一边公转,带动后行星架朝顺时针方向空转.由此可知,2挡时发动机的动力全部经前行星排传到输出轴. ?3挡:如图4所示,前进离合器C2和倒挡及高挡离合器C1同时接合,把输入轴与前齿圈及前后太阳轮组件连接成一体.由于这时前行星排中有2个基本元件互相连接,从而使前行星排连成一体旋转,输入轴的动力通过前行星排直传给输出轴,即直接挡.此时后行星排处于自由状态,后行星轮在后齿圈驱动下朝顺时针方向一边自转一边公转,带动后行星架朝顺时针方向空转.?倒挡:如图5所示,倒挡及直接挡离合器C1接合,使输入轴与前后太阳轮组件连接,同时低挡及倒挡制动器B2产生制动,将后行星架固定. 此时发动机动力经输入轴传给前后太阳轮组件,使前后太阳轮朝顺时针方向转动.由于后行星架固定不动,后行星轮在后太阳轮的驱动下朝逆时针方向转动,并带动后齿圈朝逆时针方向转动,与前行星架和后齿圈组件连接的输出轴也随之朝逆时针方向转动, 从而改变了传动方向.此时,前行星排中由于前齿圈可以自由转动,前行星排处于自由状态,前齿圈在前行星轮的带动下朝逆时针方向自由转动.有些车型自动变速器的行星齿轮机构的前后行星排的排列顺序相反,即输入轴通过前进离合器C2和后齿圈连接,输出轴与前齿圈和后行星架组件连接,但工作原理都一样.2.3行星排4挡行星齿轮变速系统的结构与工作原理超越膏台嚣图64挡行星齿轮变速器元件位置图丰田CROWN(皇冠)3.0轿车所器B1之间串联了一个单向超越离合用的A340E电子控制自动变速器就器F2,称为2挡单向超越离合器.单采用了这种行星齿轮变速系统.向超越离合器的内环和前后太阳轮组 ?结构:这种4挡行星齿轮变速件连接,外环和2挡制动器B1连接, 器是在不改变原辛普森式3挡行星齿在逆时针方向对前后太阳轮组件具有轮变速系统的主要结构和大部分零部锁止作用.当行星齿轮变速系统处于件的情况下,另外再增加一个单排行2挡时,前进离合器C1和2挡制动器星齿轮机构和相应的换挡执行元件来Bl仍同时工作.汽车加速时,前后太产生超速挡而实现的.这个单排行星阳轮组件的受力方向为逆时针方向, 齿轮机构称为超速行星排,他安装在由于2挡单向超越离合器F2的外环行星齿轮变速系统的前端,其行星架被2挡制动器B1固定,因此前后太是主动件,与变速器输入轴连接;齿圈阳轮朝~_B,-j-针方向的旋转趋势被2挡为被动件,与后面的双排行星齿轮机制动器Bl及2挡单向超越离合器锁构连接.超速行星排的工作由直接离止,使2挡得以实现.当行星齿轮变速,直器由2挡换至3挡时,即使倒挡及直合器CO和超速制动器BO来控制接离合器CO用于将超速行星排的太接挡离合器C1在2挡制动器B1释阳轮和行星架连接,超速制动器BO放之前就已接合,但由于倒挡及直接用于固定超速行星排的太阳轮.如图挡离合C1接合之后,前后太阳轮组 6所示.件的受力方向改变为顺时针方向,而为了改善2,3挡的换挡平顺性在顺时针方向上2挡单向超越离合器和使变速器在前进低挡位置发动机有F2对前后太阳轮组件没有锁止作用, 制动作用,在原3挡行星齿轮变速系前后太阳轮组件仍可以朝顺时针方向统的基础上进行了改进.旋转,使换挡能顺利进行.a)在前后太阳轮组件和2挡制动b)在前后太阳轮组件和变速器壳表23行星排辛普森式4挡行星齿轮变速系统换挡执行元件的工作情况操纵手柄换挡执行元件位置挡位ClC2BlB2B3F1F2COB0F0 1挡oooo2挡ooOooD3挡00?oo超速挡0o?00R倒挡o0oo1挡0oooS,L或2,12挡o?oo3挡oOoo注:0一接合,制动或锁止;?一作用但不影响该挡位体之间另外设置了一个制动器B3,即2挡强带带动器.带0动器B3是否工作是由操纵手柄的位置决定的,当操纵手柄位于前进挡位置(D)时,制动器B3不工作:当操纵手柄位于前进挡位置(2,1或S,L)而行星齿轮变速器处于2挡时,制动器B3 工作.这样不论汽车加速或减速,前后太阳轮组件都被该制动器固定,此时的2挡在汽车放松加速踏板减速时能产生发动机制动作用.目前大多数轿车自动变速器都采用这种结构. ?工作原理:根据行星齿轮变速系统的变速原理,当超速制动器BO 放松,直接离合器CO接合时,超速行星排处于直接传动状态,其传动比为 1:当超速制动器BO制动,直接离合器CO放松时,超速行星排处于增速传动状态,传动IrL/J~于1.当行星齿轮变速系统处于1挡,2 挡,3挡或倒挡时,超速行星排中的超速制动器B0放松,直接离合器CO结合,使超速行星排处于传动比为1的直接传动状态,而后半部分的双排行星齿轮机构各换挡执行元件的工作和原辛普森式3挡行星齿轮变速器在1 挡,2挡,3挡及倒挡时的工作完全相同,如表2所示.来自变矩器的发动机动力经超速行星排直接传给后半部分的双排行星齿轮机构,此时行星齿轮变速系统的传动比完全由后半部分的双排行星齿轮机构及相应的换挡执行元件来控制.当行星齿轮变速系统处于超速挡时,后半部分的双排行星齿轮机构保持在3挡位置,而在超速行星排中,由于超速制动器BO,产生制动,直接离合器CO放松,使超速行星排处于增速传动状态,其传动比小于l. 直接离合器CO在自动变速器处于超速挡以外的任何一个挡位时都处于接合状态,因此当发动机刚刚起动而油泵尚未建立正常的油压时,直接离合器CO已处于半结合状态,这样易使其摩擦片因打滑而加剧磨损.为防止出现这种情况,在直接离合器CO 处并列布置了一个直接单向超越离合器FO,使超速行星排在逆时针对太阳轮产生锁止作用,防止直接离合器CO 的摩擦片在半接合状态下打滑. (作者单位:大连职业技术学院) 汽车维修2011.67。
速度矢量法的辛普森式行星齿轮变速器传动比分析速度矢量法的辛普森式行星齿轮变速器传动比分析内容简介:0引言随着当今科技的发展,越来越多的轿车采用了液力自动变速器。
它通常由液力变矩器、行星齿轮变速器和液压操纵及控制系统三部分组成。
目前常用于轿车自动变速器的两种行星齿轮装置是辛普森式行星齿轮变速器和拉维娜式行论文格式论文范文毕业论文 0引言随着当今科技的发展,越来越多的轿车采用了液力自动变速器。
它通常由液力变矩器、行星齿轮变速器和液压操纵及控制系统三部分组成。
目前常用于轿车自动变速器的两种行星齿轮装置是辛普森式行星齿轮变速器和拉维娜式行星齿轮变速器。
其中辛普森式具有结构简单紧密、传动效率高、工艺性好、制造费用低、换档平稳、操纵性能好等一系列优点,因此获得了广泛的应用。
相比解析法、图论法以及杠杆法等其它行星齿轮机构分析方法,瞬心-速度矢量法具有形象直观,分析简便的优点。
只要根据约束关系,找到各行星排行星轮的瞬心,在确定输入或输出元件转速的情况下,即可得出所有元件的转动情况和整个机构的转动比大小。
1单行星轮行星排的简化运用瞬心-速度矢量法绘制行星齿轮机构线速度矢量图的关键是首先必须确定等速点和零速点。
等速点即两构件线速度相同的点,零速点即为各构件上线速度为零的点。
1 所示单行星轮行星排共有3个等速点,1个零速点。
其中A为行星轮与齿圈的啮合点,B为行星轮中心,C为行星轮与太阳轮的啮合点;U为太阳轮的回转中心,同时也是齿圈和行星架的回转中心。
为便于分析,将这4点投影到所示直线上。
A,B,C 3点的速度方向均垂直于直线OA,分别代表齿圈、行星架和太阳轮的转速。
2辛普森式行星齿轮变速器的结构特点及瞬心-速度矢量法的基本原理辛普森式齿轮变速器的特点是:双排结构,前后两排均为单行星轮行星排;前排行星架与后排齿圈或前排齿圈与后排行星架连为一体,通常作为固定输出元件;前后两排共用太阳轮。
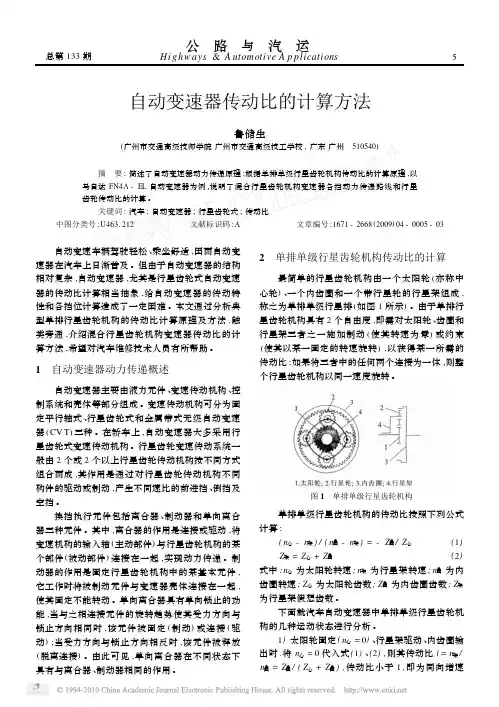
基于瞬心-速度矢量法的辛普森式行星齿轮变速器传动比分析辛普森式行星齿轮变速器作为一种广泛应用于汽车领域的传动装置,其传动比的分析对于设计及优化变速器具有重要意义。
本文将基于瞬心-速度矢量法,对辛普森式行星齿轮变速器的传动比进行分析。
辛普森式行星齿轮变速器由一组行星齿轮副、太阳轮、动力分配器、输入轴及输出轴等部分组成。
在变速时,太阳轮作为输入轴,通过动力分配器及行星齿轮副,驱动输出轴。
通过改变动力分配器的工作状态及行星齿轮副的相对位置,可以实现不同的传动比。
对于辛普森式行星齿轮变速器,其传动比可通过瞬心-速度矢量法进行分析。
瞬心是指在行星齿轮副运动过程中,相对于太阳轮不动的点。
速度矢量则是指各个齿轮副不同位置处的速度矢量方向及大小。
在分析过程中,首先需要确定各个齿轮副相对位置。
例如,在二级减速时,可以将动力分配器及输出轴端部视作固定,以太阳轮为参照,计算行星轮及支撑轴的位置及方向,确定各个齿轮副之间的相对位置。
接着,根据行星齿轮副的工作原理及太阳轮、行星轮及支撑轴的旋转方向,分别绘制各个齿轮副运动的速度矢量。
将各个速度矢量的起点、终点及方向进行相应调整,使其在瞬心处相交,从而得到在各个工作状态下的瞬心位置及速度矢量的方向与大小。
最后,通过瞬心处行星轮及太阳轮的转速比,计算出辛普森式行星齿轮变速器在不同工作状态下的传动比。
这些传动比可以作为设计及优化变速器时的重要参数,以满足不同驾驶条件下的变速要求。
总之,基于瞬心-速度矢量法的辛普森式行星齿轮变速器传动比分析,可以通过确定各个齿轮副的相对位置、绘制各个齿轮副运动的速度矢量及计算传动比等步骤,实现对变速器的传动比进行分析。
此方法不仅具有较高的分析精度,还能够为变速器的设计及优化提供重要参考。
由于题目并未给定具体的数据,因此这里将以一组示例数据进行分析,以便更好地理解瞬心-速度矢量法在辛普森式行星齿轮变速器传动比分析中的应用。
假设辛普森式行星齿轮变速器的参数如下:- 输入轴转速为1500 rpm;- 太阳轮齿数为24,行星轮齿数为18,支撑轴齿数为36;- 一级减速行星轮载荷齿数为16,驱动轮载荷齿数为28,太阳轮载荷齿数为36;- 二级减速行星轮载荷齿数为12,驱动轮载荷齿数为28,太阳轮载荷齿数为36;- 输出轴最终转速为7000 rpm。
辛普森式行星齿轮机构传动比的分析摘要:本文通过介绍辛普森式(Simpson)自动变速器双排行星齿轮的结构与工作原理,并分析矢量图对档位进行了系统分析,便于让初学学生更好的学会辛普森式行星齿轮机构的各档位运转方式,从而让中职学生更好的学会传动比的计算方法。
关键词:辛普森式(Simpson);矢量图;传动比前言随着汽车专业不断发展,使用自动变速器的车辆不断增加,教材上对于行星齿轮机构中拉维纳式和辛普森式的讲解也越来越多,教材中虽然有很多用结构图对双排行星齿轮结构进行了讲解,但很多档位的变化学生较难掌握。
本文通过介绍其中1种辛普森式的结构,用行星齿轮方程式结合矢量图的方法,详细解析了辛普森式双排行星齿轮机构每个档位的动力传递方式和传动比的计算,用于增强学生上课时的理解。
一、辛普森式行星齿轮机构组成辛普森式行星齿轮机构,结构如图1和2所示:二、第一种类型辛普森式行星齿轮机构传动比计算2.1传动比公式及矢量图使用公式与单排相同,前排n1+α×n2?(1+α)×n3=0 ,前排n1′+α×n2′?(1+α)×n3′=0,α= r2/ r1=Z2/Z1。
r1-表示太阳轮的半径 r2-表示齿圈的半径Z1-表示太阳轮的齿数 Z2-表示齿圈的齿数根据结构组成有4个元件两两相连,在矢量图中按照连接的结构将2个行星排合并起来进行计算和分析。
在竖直线段上确定R、C、S四点。
S代表太阳轮,位于最下端;位于最上端;R代表齿圈,C代表行星架,位于R和S之间。
R至C=1(单位),R至S=α ?1,C至S=α=齿圈齿数/大太阳轮齿数,故α>1(α一般为2点几),2个行星排中有2个元件是相连的可以将矢量图合并起来进行分析。
如图3所示:(2)方程式计算由于前后对应的2个行星排都参加工作所以使用前后2个行星排的公式进行计算n1′+α×n2′?(1+α)×n3′=0中n3′制动,所以n3′=0,代入后太阳轮公式得到n1′=?αn2′,由于结构中前后太阳轮连接一起所以n1=n1′,将n1′=?αn2′代入前太阳轮公式得到?αn2′+α×n2?(1+α)×n3=0,另外前行星架和后齿圈连接在一起所以n2′=n3,转变公式为?αn3+α×n2 ?(1+α)×n3=0,传动比n2/ n3(n2′)=1+2α/α,α是大于1的,所以传动比结果1+2α/α也大于1实现同向减速传动。