foxboro工程师手册范本
- 格式:doc
- 大小:354.50 KB
- 文档页数:23

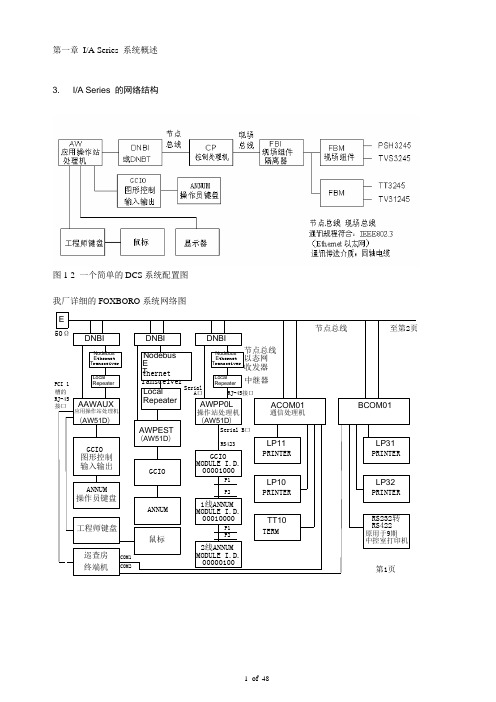
第一章 I/A Series 系统概述3. I/A Series 的网络结构图1-2 一个简单的DCS 系统配置图我厂详细的FOXBORO 系统网络图DNBIAAWAUXANNUM 操作员键盘DNBI (AW51D )AWPESTGCIOANNUMDNBIAWPP0L 1线ANNUM ACOM01PRINTER LP11PRINTER LP10TERMTT10BCOM01PRINTER LP31PRINTERLP32第1页(AW51D )应用操作站处理机通信处理机(AW51D )操作站处理机巡查房RS232转RS422原用于9期节点总线GCIO 图形控制输入输出MODULE I.D.00010000MODULE I.D.00000100GCIO MODULE I.D.00001000s erial B口s erialPCI 1槽的RJ-45接口RJ-45接口RS423P2P1P2P1中控室打印机Local RepeaterLocal Repeater LocalRepeater2线ANNUM Nodebus E thernet T ransceiver Nodebus E thernet T ransceiver Nodebus E thernet T ransceiver E 50Ω工程师键盘鼠标A口终端机节点总线以态网收发器中继器至第2页COM1COM2注:GCIO 断电10秒再电,ANMUN 全部灯闪一下控制处理机ACP601A1F100A1F300ACP602A2F300DNBI(AW51D )BAWESTGCIO ANNUMDNBI(AW51D )BWPP0LGCIO 中继器E EE E 至第3页9期K70屏(冗余)9期2楼夹层FBIFBI2线和11期公共1线FBI K25.1 屏 K25.2 屏Local RepeaterNodebus E thernet Local Repeater3线ANNUM固相ANNUMT ransceiver Nodebus E thernet T ransceiver 中继器中继器中继器(冗余)A A1F100B A1F200A A1F200BA2F100A A2F100B A2F200A A2F200B接第1页第2页BCOM15OPTIC 光纤1对MOD PCPLC001BCP601E E (AW51D )CAWESTGCIO ANNUM(AW51D )CWPP0LGCIO CCP601E E接第2页4线FCMDNBTDNBTAdapter固相ⅠN46屏 3线和固相FBI光纤转换器OPTIC 光纤转换器TDRDRDTD节点总线k25.3和 k25.5和k25.6屏s erialA口RJ-45接口Adapter5线ANNUM MODULE I.D.00010000MODULE I.D.000001004线ANNUM 注:Adapter是接线盒(冗余)(冗余)B1F100A B1F100BB1F200A B1F200B B1F300AB1F300BC01100A B ABC01100C01200C01200k25.4屏至第4页第3页DNBX(AW51B )AWPPOYGCIOANNUMACOM15RS232转CCP6025线和11期公用FCM 至第5页NOD BUS Extender PLC001RS422RS422转RS232节点总线扩展组件E E k25.7和k25.8屏T ransceiver(冗余)E(冗余)AB C02100A B AB C02100C02200C02200注:1、启动过程中Transceiver RCV 闪烁、PWR 亮2、正常运行时,Transceiver 的XMT 、RCV 闪烁,PWR 亮3、进线有问题,CLN 亮接第3页第4页DNBT(AW51D )DAWPOYDNBT(WP70)DWPP0YGCIOANNUMANNUM第5页DCP601E E10期控制室12期控制室节点总线AdapterAdapterE至第4页E(冗余)NOD BUS Extender 节点总线扩展组件(冗余)ABD01300AB ABD01300D01400D01400D01100A BABD01100D01200D012006. I/A Series 智能自动化系列的硬件应用操作站处理AWAW51 具有应用处理机和操作站处理机的双重功能。
富士康.工業機器人FOXBOT編程手冊( Ver. 2007.1 )簡介FOXBOT的編程手冊由FOXBOT指令手冊和Cypress Enable編輯器語言參考手冊組成。
FOXBOT指令手冊主要用于機器人的運動控制指令;Cypress Enable 主要用于程序的變量命名﹑流程控制﹑子程序等。
程序編輯界面是Cypress Enable編輯器﹐程序中的語句語法要求應符合Cypress Enable的要求。
FOXBOT 指令手冊目錄ACCEL (1)CURPOS (1)DECEL (1)DEFIO (1)DEFPOS (2)DELAY (2)DEFJNT (2)DIST (2)DRIVE (3)DRIVEA (3)FIG (3)GOHOME (4)HOME (4)IN (4)J2P (5)MOVE (5)OUT (6)POSRX (7)POSRY (7)POSRZ (7)POSX (7)POSY (8)POSZ (8)RESETIO (8)ROBOTSTOP (8)ROTATE (9)SETIO (9)SPEED (10)WAIT (10)附錄 (10)功能:指定內部加速度比例格式:ACCEL <加速度比例>範例:ACCEL 50CURPOS功能:取得目前的位置 (type P格式)格式:Position type 變數 = CURPOS說明:範例:DEFPOS lp1lp1=CURPOSMSGBOX POSX(lp1) & chr(13) & chr(10) &_POSY(lp1) & chr(13) & chr(10) &_POSZ(lp1) & chr(13) & chr(10) &_POSRX(lp1) & chr(13) & chr(10)&_POSRY(lp1) & chr(13) & chr(10)&_POSRZ(lp1) & chr(13) & chr(10)&_FIG(lp1)DECEL功能:指定內部減速度比例格式:DECEL <減速度比例>說明:範例:DECEL 50DEFIO功能:聲明IO變數格式:DEFIO <變量名稱> = <I/O變量類型>, <端口地址>說明:通過變量名聲明指定變量作為一個IO變量<IO變量類型>選擇 IO變量的類型。

FOXBORO控制系统维护检修指导书1 目的为保证FOXBORO控制系统正确操作、维护,及安全、平稳运行,特制定本指导书。
2 范围本作业指导书对生产装置FOXBORO控制系统的操作和维护进行了规范。
3 职责3.1 DCS系统工程师负责FOXBORO控制系统的巡回检查,及时处理故障隐患。
3.2 DCS系统工程师的基本要求1)熟悉FOXBORO控制系统软硬件及配套仪表配件的技术技能;2)掌握该装置对生产工艺流程的作用;3)掌握调节回路、联锁报警回路、历史数据库等专业技能;4)掌握该系统维护检修及组态的基本技能;5)掌握常用测试仪器和有关的标准仪器使用方法。
4 主要技术指标4.1工作条件环境温度:20±5℃相对湿度:40%~80%室内尘埃量:<0.2mg/m2 (其中铁粉、碳粉等导电性尘埃必须非常少)室内腐蚀性气体含量:H2S<0.01ppm,SO2<0.05ppm供电电压:198~242VAC 47~63Hz接地电阻:<5Ω4.2性能指标操作系统:WINOWS XP SP15 维护检修内容5.1 日常维护5.1.1 巡回检查每班至少进行一次巡回检查,内容包括DCS系统的CP控制器、数据通讯、UPS供电、温度/湿度、IO卡件及操作站等模件的检查。
1)向当班工艺人员了解各测点数据、回路、联锁等是是否有异常;2)查看所有组件的状态指示灯,判断系统工作是否正常,定期使用系统自诊断系统软件对系统进行检查;3)检查控制室有无异常噪声和气味;4)检查机房温度、湿度是否满足4.1条的要求;5)调出系统管理显示画面,检查系统的通讯和各组件的运行状态是否正常;6)做好巡回检查记录。
5.2 定期维护1)每周进行一次电源的工作状态检查;2)装置自然检修时对机柜、各组件及外围设备进行除尘。
5.3 软件维护1)根据工艺实际需要对组态不断完善;2)在进行软件修改之前,先作好修改软件的设计,按组态要求填好数据表;3)修改软件输入完毕后应先作试验,确认满足设计要求方可投入运行;4)对投运后的修改软件,拷贝留底并做好软件修改记录;5)每年至少进行一次全盘拷贝。

欧陆2604f工程师手册【原创实用版】目录I.引言A.介绍欧陆2604f工程师手册的目的和用途B.简要概述本手册的内容和结构II.欧陆2604f概述A.介绍欧陆2604f的定义和特点B.简述欧陆2604f在工业领域的应用III.工程师职责与技能要求A.明确工程师在欧陆2604f系统中的角色和职责B.介绍所需的专业知识和技能C.讨论工程设计过程中需要考虑的因素IV.欧陆2604f系统安装与调试A.描述安装前的准备工作B.解释安装过程中的注意事项C.介绍调试过程中需要注意的问题V.系统运行与维护A.阐述如何保证系统的正常运行B.讨论维护与保养的必要性C.分析常见故障及处理方法VI.安全与环保A.强调安全操作的重要性B.讨论环保要求与措施C.分析事故预防与应对方案VII.附录A.提供相关图纸和参数表B.介绍系统操作规程C.汇总常见故障解决方法正文欧陆2604f工程师手册是一份为从事欧陆2604f系统设计和运行的专业人员编写的指南。
本手册旨在帮助工程师全面了解和掌握该系统的特性和操作方法,以提高工作效率和降低事故风险。
本篇将按照提纲逐一展开,详细介绍欧陆2604f工程师手册的内容。
I.引言本部分简要介绍了欧陆2604f工程师手册的目的和用途,以及本手册的内容和结构。
目的是让读者对整个手册有一个初步的了解,明确本手册的重点内容。
II.欧陆2604f概述本部分介绍了欧陆2604f的定义和特点,以及其在工业领域的应用。
目的是让读者对该系统有一个全面的认识,明确其优势和应用范围。
III.工程师职责与技能要求本部分明确了工程师在欧陆2604f系统中的角色和职责,并介绍了所需的专业知识和技能。
目的是让读者了解自己在整个项目中的定位,以及需要具备的专业素养和能力。
IV.欧陆2604f系统安装与调试本部分描述了安装前的准备工作,包括系统布局、设备选型等。
还介绍了安装过程中的注意事项,以及调试过程中需要注意的问题。
目的是让读者了解安装调试的全过程,掌握关键环节和注意事项。

Foxboro系统⼯程师站安装步骤0311Foxboro 系统⼯程师站安装步骤1、XP及Fox⽤户的安装⑴、重新启动计算机,按F2键确保从光盘引导启动。
⑵、插⼊光盘CFI System Restore Disk 的第⼀张,到出现提⽰:Press M for the Menu,H for help,or Q to quit时,按M键→出现⼀对话框→按Restore the system→按Enter键→出现提⽰:Press R to Restore ,or A to Abort ,按R键→出现提⽰:Press C to continue or A to Abort ,按C键,进⼊到Ghost8.2画⾯,恢复到65%时,系统提⽰插⼊第⼆张光盘,按OK,出现software restore successful!→按O键退出→按Ctrl+Alt+Del键重启计算机。
⑶、系统启动到XP画⾯,⾃动Found New Hardware,配置好后,出现提⽰:Do you want to restart your computer?要选择NO。
此时需把计算机名改为⼯程师站名(如AW7011),分辨率改为1280 *1024,然后重启计算机。
2、汉字输⼊法的安装⑴、准备⼀张英⽂版的XP2或XP1。
⑵、Star t→Setting→Control Panel→Regional and Languageoptions →Languages→Install files for East Asian languages→Apply。
会弹出下⾯对话框:将盘符D:改成E:⽤左键点Browse 选中CPLEXE.EX_,然后点OK,等下会弹出下⾯对话框:将盘符D:改成E:⽤左键点OK,按提⽰重启计算机。
⑶、Star t→Setting→Control Panel→Regional and Language options按下⾯图⽰设置:⽤左键点OK,按提⽰选择Yes,重启计算机,汉字输⼊法设置完毕。
序言感谢您使用本产品,本工程师参考手册提供Ausetter系列制版设备的相关信息。
内容包括:第一章 AUSETTER CTP 简介第二章安全系统第三章设备系统电源控制第四章电子控制系统第五章上下版控制系统第六章真空和除尘系统第七章慢扫描系统第八章印版成像第九章系统维护服务第十章系统配线连接第十一章系统诊断第十二章线缆描述本工程师参考手册适合下列使用者参考:调试工程师服务工程师在使用之前,请您仔细详读本手册以确保使用上的正确;如果您在使用上仍有问题,请咨询代理商或本公司客服中心。
目录第一章AUSETTER CTP 简介 (1)1.1 章节概览 (1)1.2 Ausetter T/U系列设备功能 (1)1.2.1 Ausetter T 8系列技术参数表 (1)1.2.2 Ausetter U 8系列技术参数表 (2)1.2.3 Ausetter T 4系列技术参数表 (3)1.2.4 Ausetter U 4系列技术参数表 (3)1.2.5 作业成像流程 (4)1.3 Ausetter T/U系列设备各部分名称 (5)1.3.1 上版台 (6)1.3.2 操作面板 (6)1.3.2.1 开始按钮 (6)1.3.2.2 操作面板指示灯 (6)1.3.3 蜂鸣器 (6)1.4 Ausetter T/U系列设备功能模块 (7)1.4.1 风箱 (7)1.4.2 冲版机(非标配) (7)1.4.3 UPS(非标配) (7)1.4.4 空气压缩机(非标配) (7)1.5 版材 (7)1.5.1 版材尺寸 (7)1.5.2 版材冲洗 (8)第二章安全系统 (9)2.1 章节概览 (9)2.2 安全信息简介 (10)2.2.1 定义 (10)2.2.2 授权服务代表 (10)I2.2.3 盖板 (10)2.2.4 操作员 (10)2.2.5 操作员检修工具 (10)2.2.6 面板 (10)2.2.7 安全标准和符合情况标签 (10)2.2.8 其他安全信息来源 (12)2.2.9 安全消息的类型 (12)2.3 输出设备的安全操作 (12)2.3.1 印版的安全处理 (13)2.3.2 版尾夹的安全处理 (13)2.3.3 空气传播的散发物 (13)2.4 输出设备的安全维护 (14)2.4.1 前门 (14)2.4.2 左右舱门 (15)2.5 安全功能 (15)2.5.1 安全联锁系统 (15)2.5.2 电源/紧急停止开关 (17)2.5.2.1 常规操作 (18)2.5.2.2 紧急操作 (18)2.5.3 紧急停止按钮 (18)2.6 危害 (19)2.6.1 激光危害 (19)2.6.1.1 激光危险和辐射标签 (21)2.6.1.2 热敏成像头上的铭牌标签 (21)2.6.1.3 激光光圈标签 (21)2.6.2 机械危害 (22)2.6.2.1 气动部件 (24)2.6.3 电气危害 (24)2.6.3.1 电气壳体 (24)2.6.3.2 电气连接 (25)II2.7 防静电措施 (26)第三章设备系统电源控制 (27)3.1 章节概览 (27)3.2 电源控制和分布 (27)3.3 开关电源 (31)3.3.1 开头电源的类型与用途 (31)3.3.2 如何调节开关电源的输出电压 (31)第四章电子控制系统 (33)4.1 章节概览 (33)4.2 主板和扩展板位置 (33)4.3 主板(UNICORN_CORE) 配电描述与诊断 (34)4.3.1电路板名称 (34)版本 (34)4.3.24.3.3指示灯图示与测试点 (34)4.3.3.1电源指示灯说明 (35)4.3.3.2主板5V电源工作回路与诊断 (35)主板12V电源工作回路与诊断 (35)4.3.3.34.3.3.4状态指示灯说明 (36)4.4 扩展板(UNICORN_EXT)配电描述与诊断 (37)4.4.1电路板名称 (37)4.4.2版本 (37)4.4.3指示灯图示与测试点 (37)电源指示灯说明 (37)4.4.3.14.4.3.224V马达电源工作回路与诊断 (38)4.4.3.324V气阀电源工作回路与诊断 (38)4.5 传感器描述与诊断 (39)4.5.1传感器位置 (39)4.5.2传感器列表 (40)4.5.3传感器回路与诊断 (42)4.5.3.1版道传感器 (42)III零位、最大位传感器 (43)4.5.3.24.5.3.3版尾检测传感器 (43)4.5.3.4电接点压力表 (44)4.5.3.5左版头夹压杆传感器 (44)4.5.3.6右版头夹压杆传感器 (45)4.5.3.7版尾夹传感器 (46)4.5.3.8版尾夹压杆右上位传感器 (46)4.5.3.9左压辊传感器 (47)右压辊传感器 (47)4.5.3.104.5.3.11平衡机构检测传感器 (48)4.5.3.12平衡块状态(拔出、插入)传感器 (49)4.5.3.13版尾夹钳传感器(霍尔传感器) (50)4.5.3.14版尾夹横拉杆传感器 (51)第五章上下版控制系统 (52)5.1 章节概览 (52)5.2 气缸布局图 (53)5.2.1 气缸列表 (54)5.2.1.1 Ausetter 8系列设备气缸列表 (54)5.2.1.2 Ausetter 4系列设备气缸列表 (54)5.3 气动控制系统 (55)5.3.1 气阀控制列表 (55)5.3.2 供气校准 (56)5.3.2.1 油水分离器 (56)5.3.2.2 电接点压力表 (56)5.4 上版下版机构工作流程 (57)5.4.1 上版机构工作流程 (57)5.4.2 上版动作流程 (58)5.4.3 退版(下版)动作流程 (62)5.4.4 版头夹动作过程 (63)5.4.5 版尾夹动作过程 (63)IV5.5 上版下版结构组件 (64)5.5.1 版门组件 (64)5.5.2 上版台与版道组件 (64)5.5.3 版尾夹组件 (65)5.5.3.1 形式一版尾夹 (65)5.5.3.2 形式二版尾夹 (66)5.5.4 版尾夹压杆组件 (66)5.5.5 压辊组件 (67)5.5.6 版头夹压杆组件 (68)5.6 上下版机构校准 (69)5.6.1 气缸执行校准 (69)5.6.1.1 行程控制 (69)5.6.1.2 速度控制 (69)5.6.1.3 气缸日常维护检查 (69)5.6.2 传感器位置校准 (70)5.6.3 版门校准 (71)5.6.4 版道校准 (71)5.6.5 压辊校准 (71)5.6.6 版头夹校准 (72)5.6.7 版头夹压杆校准 (72)5.6.7.1 设置版头夹压下位置 (73)5.6.8 版尾夹校准 (74)5.6.9 版尾夹压杆校准 (74)5.6.10 版尾夹转钩(横拉杆动作)校准 (75)5.6.11 上下版校准 (75)5.6.11.1 印版示意图 (75)5.6.11.2 校正版宽 (75)5.6.11.3 校正版尾夹咬口宽度 (76)5.6.11.4 版心校准 (77)5.7 转鼓系统 (77)V5.7.1 转鼓的组成部分 (77)5.7.2 转鼓版头夹 (78)5.7.2.1 版头夹定位销水平调节 (78)5.7.2.2 版头夹支承座水平调节 (79)5.7.3 转鼓电机与皮带 (80)5.7.3.1 皮带张力调节 (80)5.7.3.2 编码器 (80)5.7.3.3 安装与更换编码器 (81)5.7.3.4 编码器引起的图像故障 (81)5.7.3.5 编码器故障诊断 (82)5.7.4 转鼓周长校准 (82)5.8 转鼓平衡系统 (84)5.8.1 平衡系统的组成部分 (84)5.8.1.1 动态平衡块 (84)5.8.1.2 静平衡 (84)5.8.2 平衡块执行机构 (85)5.8.2.1 平衡块位置传感器 (86)5.8.2.2 平衡块执行机构插杆插入和拔出传感器(磁性开关) (86)5.8.2.3 磁性开关的动作原理 (86)5.8.3 平衡系统调整 (86)5.8.3.1 平衡块参数(无转钩挡块) (87)5.8.3.2 平衡块参数(已安装转钩挡块) (88)5.8.3.3 平衡块参数设置 (89)5.8.3.4 设置版头夹前沿跟平衡块插入位置对齐 (90)5.8.3.5 查找和移动平衡块 (93)5.8.3.6 不同规格版材的不平衡量设置 (94)5.8.4 平衡块故障排除 (95)5.8.4.1 平衡块随机测试 (95)5.8.4.2 清零不平衡量 (95)5.8.4.3 0xBB10、0xBB12 错误 (95)VI5.8.4.4 设备寻找不到平衡块 (95)5.9 阀岛和电磁阀控制 (96)5.9.1 阀的变更时间 (96)5.9.2 电磁阀清洁 (96)5.9.3 电磁阀诊断 (97)5.9.3.1 手动诊断 (97)5.9.3.2 程序控制诊断 (97)5.10 上下版故障排除 (97)5.10.1 适用内核及版本号 (97)5.10.2 相关说明 (98)5.10.2.1 错误说明 (98)5.10.2.2 备注 (98)5.10.3 上版流程 (99)5.10.4 退版流程 (102)5.10.5 自检复位流程 (104)第六章真空和除尘系统 (105)6.1 章节概览 (105)6.2 介绍真空和除尘系统 (105)6.3 转鼓真空 (105)6.3.1转鼓真空组件 (106)6.3.2转鼓真空诊断 (107)6.3.2.1设备启动时自检 (107)6.3.2.2程序控制诊断 (107)6.4 除尘系统 (108)6.4.1除尘系统组件 (108)6.4.2除尘系统诊断 (109)6.4.2.1设备启动时自检 (109)6.4.2.2程序控制诊断 (109)6.5 真空泵更换 (109)6.6 更换除尘过滤器 (110)VII更换除尘过滤器 (110)6.6.1第七章慢扫描系统 (113)7.1 章节概览 (113)7.2 光学平台移动系统 (113)7.3 平台移动系统的组成部分 (116)丝杠 (116)7.3.17.3.2光头移动安装台 (117)7.3.2.1设置光学平台移动的默认速度 (117)导轨 (118)7.3.37.3.4丝杠电机 (118)7.3.5平台零位和最大位传感器 (118)7.3.5.1设置光学平台移动的最大位置 (119)7.3.5.2复位最大位 (120)7.3.6快扫、慢扫方向 (120)7.4 光学平台移动故障排除 (120)7.5 丝杠与导轨维护 (121)清洁 (121)7.5.17.5.2检查和润滑脂的补充间隔 (121)7.5.3丝杠润滑 (122)7.5.4导轨润滑 (122)7.6 版边检测系统组件 (123)7.6.1版边检测系统维护 (123)7.6.1.1清洁版边检测系统镜头 (123)7.6.1.2版边检测系统光功率反馈诊断 (124)7.7 版边检测设置与检查 (125)7.7.1设置版边检测U槽快扫方向位置(Tiffdownload版本低于Ver.2.7.0R) (125)7.7.1.1设置模版的版边检测U槽快扫方向位置的默认值 (126)7.7.2测量版边检测数据与分析 (126)版边检测作业流程(Tiffdownload Ver 2.7.0之前的版本采用以下版边检测流程) (126)7.7.2.17.7.2.2版边检测U槽(快扫方向)定位 (126)VIII版边检测慢扫方向定位 (127)7.7.2.37.7.2.4版边检测数据采集 (128)7.7.2.5保存版边检测曲线 (129)7.7.2.6版边检测曲线分析 (129)第八章印版成像 (131)8.1 章节概览 (131)8.2 成像系统介绍 (131)8.2.1 成像控制步骤 (131)8.2.1.1成像控制步骤流程图 (132)8.2.1.2成像检查步骤流程图 (133)8.2.1.3 成像开始启动 (133)8.2.1.4成像开始检查 (135)8.2.1.5等待上版 (135)8.2.1.6等待版边检测完成 (135)8.2.1.7等待平衡块调整完成 (135)8.2.1.8准备曝光 (135)8.2.1.9更新计数器 (136)8.2.1.10开始打印转动 (136)8.2.1.11曝光 (136)8.2.1.12退版 (136)8.2.1.13退出 (136)8.2.2 校准系统 (136)8.2.3 光强校正 (136)8.2.3.1启动光强检测 (136)8.2.4 写入校准文件 (137)8.2.5 查看光强校准 (137)8.2.5.1查看结果文件 (138)8.2.5.2查看设备校准表 (140)8.2.6 查看配置文件 (141)8.2.7 查看光强校准分析曲线 (143)IX8.2.8 激光寿命控制 (143)8.2.8.1激光寿命检查 (143)8.2.8.2检测激光功率 (143)8.3 成像组件 (144)8.3.1 成像系统布线 (145)8.3.1.1光头箱布线 (145)8.3.1.2光头(光学平台)布线 (146)8.3.1.3光强传感器布线 (147)8.3.2 光头箱组件 (147)8.3.2.1激光器 (148)8.3.2.2光纤 (149)8.3.2.3恒温装置 (149)8.3.2.4热敏电阻 (150)8.3.2.5散热风扇 (150)8.3.3 HOTSPOT板描述与诊断(UV系列) (151)8.3.3.1Hotspot板描述 (151)8.3.3.2指示灯和测试点 (151)8.3.3.3 12V电源工作回路与诊断 (152)8.3.3.4 12V_LD电源工作回路与诊断 (152)8.3.3.5 12V_TEC电源工作回路 (153)8.3.3.6 状态指示灯 (153)8.3.4 更换HOTSPOT板 (154)8.3.5 激光驱动板(LD板)描述与诊断(UV系列) (155)8.3.5.1激光驱动板(LD板)描述 (155)8.3.5.2指示灯和测试点 (155)8.3.5.3 LD_POWER电源指示灯 (155)8.3.5.4 5V电源指示灯 (156)8.3.6 更换LD板 (157)8.3.7 恒温系统控制与诊断 (158)8.3.7.1热敏电阻的诊断和更换 (159)X8.3.7.2半导体制冷器的诊断和更换 (159)8.4 光头组件 (162)8.4.1 小镜头调焦板(Spider)描述与诊断(UV) (164)8.4.1.1小镜头调焦板(Spider)描述 (164)8.4.1.2电源指示灯和测试点 (164)8.4.1.3 24V电源工作回路 (165)8.4.1.4 24V_VCM 电源工作回路 (165)8.4.1.5 状态指示灯 (166)8.4.2 小镜头调焦板(Spider)更换 (166)8.4.3 焦距 (166)8.4.3.1焦距 (166)8.4.3.2判定焦距 (167)8.4.3.3调焦(确定镜头的最佳焦距) (168)8.4.3.4光头安装标准 (169)8.4.4 角度 (169)8.4.4.1角度正确 (170)8.4.4.2角度偏大 (170)8.4.4.3角度偏小 (170)8.4.4.4调角(确定密排的最佳角度) (170)8.4.5 延时 (172)8.4.5.1延时调整 (172)8.4.5.2延时值的计算 (173)8.5 光强校准板 (174)8.5.1 光强校准板安装与更换 (174)8.6 使用设备校准菜单 (176)8.6.1 焦距校准 (176)8.6.2 角度校准 (176)8.6.3 延时校准 (177)8.6.4 曝光功率校准 (178)8.6.4.1操作流程 (178)XI8.6.4.2操作步骤 (178)8.6.4.3判断标准 (179)8.7 成像高级参数应用 (181)8.7.1 屏蔽故障激光通道 (181)8.7.2 启用直线螺旋校正功能 (182)8.7.3 启用激光通道叠行功能 (183)8.7.4 关闭自动对焦 (184)8.7.5 启用色版优化 (184)8.7.6 应用默认焦距 (185)8.7.7 使用默认镜头角度 (185)8.7.8 曝光功率与转速 (186)8.8 光学平台安装与更换 (186)8.8.1 热敏光学平台安装与更换 (186)8.8.1.1安装与更换流程概览 (186)8.8.1.2移除已故障的镜筒(如果需要) (187)8.8.1.3将镜筒安装于光学平台 (187)8.8.1.4调整与更换三角位移传感器 (188)8.8.1.5焦距校准与调试 (190)8.8.1.6角度校准与调试 (191)8.8.1.7镜头高低校准与调试 (191)8.8.2 UV光学平台安装与更换 (192)8.8.2.1安装与更换流程概览 (192)8.8.2.2移除已故障的光学平台(如果需要) (192)8.8.2.3将光学平台安装于平台座 (192)8.8.2.4安装与更换光纤密排 (192)8.8.2.5光学平台位置校准 (195)8.8.2.6焦距校准与调试 (196)8.8.2.7角度校准与调试 (196)8.8.2.8镜头高低校准与调试 (197)8.9 成像系统维护 (197)XII8.9.1 镜头防尘盖清洁 (197)8.9.2 镜头清洁 (198)8.9.3 UV光纤密排清洁 (198)8.9.4 UV光纤接头清洁 (199)8.9.4.1清洁需要的工具 (199)8.9.4.2光纤接头质量标准 (200)8.9.4.3清洁流程 (200)8.9.4.4清洁光纤接头 (201)8.9.5 光强校准板清洁 (203)8.10 AFM_SPD_PID系数介绍 (203)8.10.1 本节说明 (203)8.10.2 自动对焦平台的常用数据 (203)8.10.2.1 常规数据 (203)8.10.2.2 工作数据 (203)8.10.3 马达安装后的测试要点 (204)8.10.3.1 弹力测试 (204)8.10.3.2 Lens的动态跳动量分析 (204)8.10.3.3 PSD静态跳动 (204)8.10.3.4 PSD静态跳动曲线截取方法 (205)8.10.3.5 PSD动态跳动 (207)8.10.3.6 PSD动态跳动曲线截取方法 (207)8.10.3.7 PSD动态跳动曲线分析 (210)8.10.4 影响PSD跳动量的因素 (210)8.10.5 常用的可调参数 (211)8.10.6 电流环系数调整与说明 (211)8.10.7 速度环系数调整与说明 (212)8.10.8 位置环系数调整与说明 (214)8.10.9 其它参数说明与调整 (215)8.10.10 非自动对焦平台的参数调整要素 (215)第九章系统维护服务 (218)XIII9.1 章节概览 (218)9.2 系统维护简介 (218)9.2.1 推荐的服务工具 (218)9.2.2 忽略安全联锁 (219)9.2.3 打开和关闭设备外盖 (220)9.2.3.1 打开设备前门和顶门 (220)9.2.3.2 关闭前门和顶门 (221)9.2.3.3 打开设备后门 (221)9.2.3.4 打开设备左右舱门 (221)9.3 维修计划 (222)9.3.1 维护计划表 (222)9.4 工作环境检查 (223)9.4.1 温湿度 (223)9.4.2 压缩空气气压 (223)9.4.3 设备零地电压检查 (223)9.4.4 UPS输出电压检查 (223)9.5 清洁流程 (224)9.5.1 机器表面清洁 (224)9.5.2 擦拭污渍 (224)9.5.3 清洁上版台 (224)9.5.4 转鼓组件清洁 (224)9.5.4.1 清洁转鼓表面 (224)9.5.4.2 清洁转鼓真空气孔 (225)9.5.4.3 清洁版材边缘检测U槽 (225)9.5.4.4 清洁版头夹 (226)9.5.4.5 清洁转鼓压辊 (226)9.5.5 光学清洁 (226)9.5.5.1 镜头防尘盖清洁 (226)9.5.5.2 镜头清洁 (226)9.5.5.3 光强校准板清洁 (226)XIV9.5.5.4 激光箱散热风扇清洁 (227)9.6 压缩空气维护 (227)9.6.1 排水 (227)9.6.2 更换空气过滤芯 (227)9.7 更换换气滤网 (227)9.8 更换版尾夹 (227)9.8.1 更换版尾夹压簧与压簧挡片 (227)9.9 皮带张力检查与调节 (230)9.10 导轨与丝杠润滑 (230)9.11 印版输出检查 (230)9.11.1 检查印版输送 (230)9.11.1.1 检查或更换版道耐磨胶带 (231)9.11.2 检查灰阶成像质量 (231)9.11.3 检查图像质量 (232)9.11.4 检查图像倾斜 (233)9.11.5 检查图像上空和左空精度 (233)9.11.6 检查图像的居中 (234)9.12 升级软件和固件 (234)9.12.1 升级打印控制软件 (234)9.12.2 升级设备固件 (235)9.13 备份关键文件 (235)9.13.1 保存设备信息文件 (235)9.13.2 备份设备参数 (235)9.13.3 备份光强校准数据文件 (236)9.13.4 备份印版参数模版文件 (236)第十章系统配线连接 (237)10.1 章节概览 (237)10.2 线缆与接口 (237)10.2.1布线总图 (238)主板布线图 (239)10.2.2XV风箱布线图 (241)10.2.410.2.5传感器左转接板布线图 (242)10.2.6传感器右转接板布线图 (242)光强校准板布线图 (242)10.2.710.2.8传感器版尾夹转接板布线图 (243)10.2.9温湿度传感器电路板布线图 (243)10.2.10版尾检测传感器布线图 (243)版道传感器布线图 (243)10.2.1110.2.12零位最大位传感器布线图 (244)10.2.13电接点压力表布线图 (244)第十一章系统诊断 (245)11.1 章节概览 (245)11.2 介绍Ausetter CTP的系统诊断 (245)11.3 Ausetter上电初始化 (247)11.3.1 适用内核及版本号 (247)11.3.2 初始化流程图 (248)11.3.3 引导步骤与初始化 (248)11.3.3.1 上电硬件初始化 (249)11.3.3.2 内核软件控制器初始化 (249)11.3.3.3 文件参数初始化 (249)11.3.3.4 数据内存(SDRAM)初始化 (249)11.3.3.5 传感器和气阀链路等BOOL设备自检 (250)11.3.3.6 运动部件初始化和自检 (251)11.3.3.7 从设备扫描检查 (253)11.3.3.8 焦距及角度控制单元(SPIDER)信息同步和检测 (254)11.3.3.9 激光控制单元(HOTSPOT)信息同步和检测 (254)11.3.3.10 数据传输通路快速自检 (255)11.3.3.11 负压发生设备自检 (255)11.4 诊断介绍 (255)XVI11.4.2 系统自检错误代码 (256)11.4.2.1 内存自检 (256)11.4.2.2 设备阀自检 (256)11.4.2.3 快扫自检 (257)11.4.2.4 RS485自检 (258)11.4.2.5 调焦板自检 (258)11.4.2.6 HotSpot板自检 (258)11.4.2.7 数据通路自检 (258)11.4.3 错误代码描述 (258)11.4.4 错误代码分类 (259)11.4.4.1 阀控制模块错误代码0x3000-0x3017 (259)11.4.4.2 快扫AC马达控制模块错误代码0xE000-0xE0FF (259)11.4.4.3 慢扫马达控制模块错误代码0xE400-0xE4FF (260)11.4.4.4 传感器模块错误代码0xE500-0xE5FF (261)11.4.4.5 上下版控制模块错误代码0x7701-0x77C0 (261)11.4.4.6 平衡块控制模块错误代码0xBB00-0xBB13 (261)11.4.4.7 版边检测控制模块错误代码0xE600-0xE689 (262)11.4.4.8 打印模块执行过程中发生的错误代码0x9001-0x9060 (263)11.4.5 错误日志 (264)11.4.6 日志信息 (264)11.4.7 错误信息快照 (264)11.5 设备诊断 (264)11.5.1 转鼓马达控制 (264)11.5.2 光学平台马达控制 (266)11.5.3 上下版控制 (268)11.5.4 气缸执行机构和传感器 (268)11.5.4.1 版门打开与关闭控制和传感器 (270)11.5.4.2 版道升起与放下控制和传感器 (270)11.5.4.3 压辊升起与压下控制和传感器 (270)XVII11.5.4.4 版头夹压杆升起与压下控制和传感器 (271)11.5.4.5 版尾夹压杆升起与压下控制和传感器 (271)11.5.4.6 版尾夹横接杆控制和传感器 (271)11.5.4.7 版尾夹传感器 (271)11.5.4.8 平衡机构控制和传感器 (271)11.5.4.9 气压状态传感器 (271)11.5.5 查找和移动动平衡块 (272)11.5.6 检查机器参数 (272)11.5.7 导入机器参数 (272)11.5.8 控制面板测试 (273)11.5.9 重新自检 (273)11.5.10 出厂模式 (273)11.5.11 充值管理 (274)11.6 光学诊断 (274)11.6.1 设置设备分辨率 (274)11.6.2 设置(HS)地址 (275)11.6.3 设置设备通道总数 (275)11.6.4 备份(HS)出厂曲线 (275)11.6.5 光强传感器校准 (275)第十二章线缆描述 (277)12.1 章节概览 (277)12.2 Ausetter U/T系列线缆清单 (277)12.2.1 Ausetter U800系列线缆清单 (277)12.2.2 Ausetter T800系列专用线缆清单 (278)12.2.3 Ausetter 400系列专用线缆清单 (278)12.2.4 Alpha 900系列专用线缆清单 (279)12.2.5 Aurora 800系列线缆清单 (279)12.3 线缆描述 (280)12.3.1 传感器尾转接板电缆 (280)12.3.2 光强校准板信号电缆 (280)XVIII12.3.3 步进电机驱动器控制线 (281)12.3.4 传感器左右接板电缆和键盘板信号电缆 (282)12.3.5 HotspotUV_16信号电缆(DB15-DB15) (283)12.3.6 调焦板信号电缆 (284)12.3.7 平台信号与电源电缆 (285)12.3.8 气阀控制电缆和气阀控制线 (286)12.3.9 USB通讯线 (287)12.3.10 上版台有无版和版道上中下传感器 (287)12.3.11 版头位置和零位最大位传感器 (288)12.3.12 电接点压力表和急停开关状态、版头位置传感器 (288)12.3.13 版边对齐、下版道有无版、出版口检测和上下版安全位传感器 (289)12.3.14 版尾检测传感器 (289)12.3.15 动平衡位置和调焦板0位、平台0位传感器 (290)12.3.16 平台光强检测连接线 (290)12.3.17 版尾夹钳位置、版尾夹和四开机版尾夹传感器 (290)12.3.18 版尾夹传感器 (291)12.3.19 版头夹压杆、压辊、版尾夹压杆、版尾夹左右压杆、动平衡状态和温湿度传感器 (291)12.3.20 调焦板激光器连接线 (292)12.3.21 版边对齐、下版道有无版、出版口检测和上下版安全位传感器 (293)12.3.22 版头位置传感器连接线HF (293)12.3.23 急停开关状态连接线HF (293)12.3.24 版尾检测传感器连接线HF (293)1第一章AUSETTER CTP 简介本章节主要介绍Ausetter T系列和Ausetter U系列设备,网络配置,和它们的主要功能模块。
第三章典型过程控制简介I/A Series系统提供了丰富的自动控制策略和方案。
通常来说,使用I/A系统的工厂操作员可能需要进行以下这些常规操作:·启动或者停止设备(泵,风机等),开启或关闭阀门·改变控制器的设定值,将过程变量控制在一个稳定值附近·改变控制器的控制模式对于一个工厂来说,控制工厂的最终终端,是操作员,而不是I/A系统本身。
所以对于操作员来说,还是有必要对I/A系统的一些控制概念和进程有所了解。
本章目标3.1了解Compound和Block的基本功能,以及命名惯例。
学习使用设备的控制面板,启/停(开/关)设备,并熟悉常规设备的图形 3.2表达形式。
3.3通过仪表操作面板确定与设备相关的Compound和Block,并确认报警。
了解单回路控制系统控制器的测量值,设定值与输出值的关系。
3.4当使用控制器的操作面板的时候:3.5·确认其测量值、设定值和输出值的具体数值和工程单位·控制器手动/自动模式的意义·控制器本地/远程模式的意义·控制器保持/跟踪模式的意义3.6当使用控制器操作面板的时候:·执行手动/自动,本地/远程模式的切换·使用控制器面板上提供的箭头或输入框改变设定值和输出值的大小了解串级控制回路的基本功能。
3.7当使用控制器输出控制面板的时候:3.8·确认其输入值与输出值的具体数值与工程单位·改变其手动/自动模式·调节输出值调用Group Display来控制一个典型的工厂过程,并创建自己的Group 3.9Display。
3.10完成本章配套实验目录3.1 Compound和Block的命名惯例 (3)3.2 离散型设备 (4)3.2.1 控制离散型设备 (4)3.2.2 离散型设备的状态指示 (5)3.3 仪表的操作面板 (6)3.4 控制器 (8)3.5 控制器面板 (9)3.5.1 特征 (9)3.5.2 控制模式 (10)3.6 控制器的操作 (11)3.6.1 改变控制模式 (11)3.6.2 改变数值 (12)3.7 串级控制回路 (13)3.8 控制器输出控制面板 (15)3.9 Group Display (17)3.9.1 Scratchpad Group Displays (18)3.10 本章实验 (19)3.10.1仪表控制面板 (19)3.10.2 Grinder操作 (20)3.10.3 Cream Cooling操作 (22)3.10.4 Water Level操作 (24)3.10.5 Coffee Brewing操作 (25)3.10.6 Water Heating操作 (27)3.10.7串级控制回路 (28)3.10.8 Shipping操作 (29)3.10.9 Group Displays (30)3.1 Compound 和Block 的命名惯例一个工厂的全部控制方案通常会根据工厂的实际功能区域的组成而分为许多个功能组(比如火电厂的锅炉、汽轮机、循环水、化学水处理等)。
I/A’s系统维护手册(工程师手册)编制:何卫兵上海•福克斯波罗有限公司二零零二年元月第一章系统概述本手册为上海福克斯波罗有限公司DCS系统I/A维护手册,并作为I/A’s培训手册的补充。
用户可以结合两本手册来进行系统操作、软件组态及系统维护。
必要时还应参考随机的原版资料及福克斯波罗公司提供的中文培训手册。
本手册针对福克斯波罗制造的I/A’S,采用Solaris 2.5.1操作系统和I/A’s 6.2.1版本应用软件。
整个系统为一个节点,在冗余的节点总线DNBI上挂有:三台工程师站AW5101、AW5102、AW5103该站作为工程师站,内置256M内存及8GB硬盘,AW5102外挂一台喷墨打印机(电缆长度15米),AW5103配有和MIS系统通讯用的第二以太网卡。
该工作站安放在工程师站内,与I/A机柜(位于电子间)之间的通讯电缆长度为30米。
四台操作员站WP5101、WP5103、WP5104、WP5105该站内置128M内存及8GB硬盘,并各配有一个21”的CRT。
该工作站安放在主控室内与I/A机柜(位于电子间)之间的通讯电缆长度为30米。
一台操作员站WP5102该站作为大屏幕操作站,内置128M内存及8GB硬盘,除配有一个21”的CRT 外。
还配有一台用于显示大屏幕的以太网卡。
该工作站安放在主控室内,与I/A机柜(位于电子间)之间的通讯电缆长度为30米。
十一对容错台控制处理站CP4001、CP4002、CP4003、CP4004、CP4005、CP4006、CP4007、CP4008、CP4009、CP4010、CP4011此容错型控制处理站CP40BFT,用于实现DCS系统的数据采集及控制。
该控制处理器安放在电子间内。
现场由十八个装有现场总线组件FBM的现场机柜、十个安装DCS系统辅助装置(包括冗余的24VDC电源、交流继电器、直流继电器、SIMENSE交流接触器、以及相应的I/O端子)的继电器柜、一个DCS系统220VAC配电柜共同构成。
I/A’s系统维护手册(工程师手册)编制:何卫兵•福克斯波罗二零零二年元月第一章系统概述本手册为福克斯波罗DCS系统I/A维护手册,并作为I/A’s培训手册的补充。
用户可以结合两本手册来进行系统操作、软件组态及系统维护。
必要时还应参考随机的原版资料及福克斯波罗公司提供的中文培训手册。
本手册针对福克斯波罗制造的I/A’S,采用Solaris 2.5.1操作系统和I/A’s 6.2.1版本应用软件。
整个系统为一个节点,在冗余的节点总线DNBI上挂有:●三台工程师站AW5101、AW5102、AW5103该站作为工程师站,置256M存及8GB硬盘,AW5102外挂一台喷墨打印机(电缆长度15米),AW5103配有和MIS系统通讯用的第二以太网卡。
该工作站安放在工程师站,与I/A机柜(位于电子间)之间的通讯电缆长度为30米。
●四台操作员站WP5101、WP5103、WP5104、WP5105该站置128M存及8GB硬盘,并各配有一个21”的CRT。
该工作站安放在主控室与I/A机柜(位于电子间)之间的通讯电缆长度为30米。
●一台操作员站WP5102该站作为大屏幕操作站,置128M存及8GB硬盘,除配有一个21”的CRT外。
还配有一台用于显示大屏幕的以太网卡。
该工作站安放在主控室,与I/A 机柜(位于电子间)之间的通讯电缆长度为30米。
●十一对容错台控制处理站CP4001、CP4002、CP4003、CP4004、CP4005、CP4006、CP4007、CP4008、CP4009、CP4010、CP4011此容错型控制处理站CP40BFT,用于实现DCS系统的数据采集及控制。
该控制处理器安放在电子间。
现场由十八个装有现场总线组件FBM的现场机柜、十个安装DCS系统辅助装置(包括冗余的24VDC电源、交流继电器、直流继电器、SIMENSE交流接触器、以及相应的I/O端子)的继电器柜、一个DCS系统220VAC配电柜共同构成。
第二章文件结构黄台发电厂8号机DCS系统除了DCS相应的流程画面外,还有许多系统文件(包括环境文件、DM/AM管理文件、通讯文件、报警键盘文件、FOXAPI相关文件、网络连接文件、系统工具程序等),文件数量较多,了解本套DCS系统的文件结构对系统的维护、文件的修改、文件的备份十分重要。
1./opt/dcs DCS系统流程图主目录2./opt/fox/env 环境定义文件目录Initial 初始环境Operator 操作员环境Process_Eng 工程师环境3./usr/fox/customer/hi/dmcfg Display Manger配置文件4./usr/fox/customer/config/cfg/* Alarm Manger配置文件5./opt/customer/displib 用户自定义库文件主目/opt/customer/displib/Trends/* 用户自定义趋势/opt/customer/displib/Palettes/* 用户自定义粘e贴板6./opt/fox/ais/bin/* FOXAPI相关文件7./opt/mis/ 通讯文件8./usr/fox/wp/data/wp51_glbls.all 系统宏参数定义文件9./usr/fox/wp/data/er 系统宏定义参数定义文件10./usr/fox/wp/data/dmpasswd_cfg 环境密码文件11./opt/fox/sysmgm/sysmon/smon_log 系统监视信息记录文件12./etc/defaultrouter 有关DCS-DCS通讯的文件/etc/hosts/etc/hostname.hme1第三章基本操作1.环境说明I/A’s工作站的环境主要有以下几个:●Initial初始环境,其顶部菜单为:File View Display Group Trend CCS Screen_Saver 其中“Sys”菜单中对操作员开放的功能主要有:改变环境、选择画面中单击“File”菜单,将下拉出系统有关操作菜单。
●操作员环境,其顶部菜单于初始环境一样:● Engineer工程师环境,其顶部菜单为:Sys Alarm Config Display Group Trend CCS SCS SftMnt在工程师环境中,“Sys”菜单中的功能比较多,主要有:改变环境、开启多个DM界面、打印画面(、进入系统管理等功能。
单击“Config”,可以进入DCS系统的各个应用程序,如:CIO组态、历史组态、绘图、报警键盘组态等。
单击“Display”菜单,将弹出DAS流程画面主菜单画面。
单击“Group”菜单,将弹出DAS成组画面主菜单画面。
单击“Trend”菜单,将弹出DAS趋势画面主菜单画面。
单击“CCS”菜单,将弹出CCS流程画面主菜单画面。
单击“SCS”菜单,将弹出CCS流程画面主菜单画面。
单击“SftMnt”,可以进入VT100环境、SHUTDOWN工作站、REBOOT工作站等功能。
2.系统报警当发生系统报警时,顶部“System”系统报警将会有颜色的变化用于显示当前的系统报警状态,其颜色状态含义为:绿色系统运行正常,无报警闪烁绿色 当前系统运行正常,无报警,但有未确认的系统报警存在红色 系统发生报警且已确认,但报警信号仍然存在闪烁红色 系统发生报警且未经确认当发生系统报警后,可用下面两种方法查找报警:A. 进入程师工环境→Sys →Sys_Mgmt →查找相应的故障硬件。
B. 进入VT100环境,做如下操作:# cd /opt/fox/sysmgm/sysmon# cat smon_log根据系统信息记录,确认相应的故障原因:发生系统故障报警后,工程师应及时进入工程师环境,对系统情况进行查看,确认系统故障报警的来源并采取相应措施,保证系统的安全可靠运行。
具体的系统故障报警查找操作将在系统维护的相关章节中详细叙述。
3. 过程报警当发生过程报警时,顶部“Process ” 过程报警将会有颜色的变化用于显示当前的过程报警状态,其颜色状态含义为:绿色 过程运行正常,无过程报警闪烁绿色 当前过程运行正常,无报警,但有未确认的过程报警存在 红色 过程发生报警且已确认,但报警信号仍然存在闪烁红色 过程发生报警且未经确认当过程发生报警后,可用单击“Process ”进入过程报警信息画面。
在报警信息画面中,报警信息文本格式为:点名 模块说明 报警类型 确认状态发生时间 发生报警时的数值 设定的报警值见下图:C URRENT ALARMS : 当前报警2 134 56 781 DAS00A:LT00120 报警点名(过程参数)2 C2R,WATER LEVEL 报警点说明3 HIABS 报警类型4 06-27 18:05:15 报警时间5 (120.00) 当前报警值6 >80.00 报警限值7 3 表示该报警级别为第三级8 U 表示该报警末确认,确认之后字符无一幅屏幕可显示10条当前过程报警信息,每条信息占用二行,报警信息格式如上图。
在报警信息画面中,其底部按钮有:Ack Alarm (确认当前过程报警)用球标选择某一未确认的过程报警(确认状态为“U ”),再点击“Ack Alarm ”,既可确认该过程报警,确认状态的“U ”消失。
●Ack Page (确认当前页中所有过程报警) 用球标在当前页中点任意一栏报警,再点击“Ack Page ”,既可确认该报警信息页中的所有过程报警。
●Alarm Detail (当前过程报警的详细信息) 用球标选择某一过程报警,再点击“Alarm Detail ”,既可进入该过程报警的详细显示画面 ●User Display (与当前过程报警有关的流程画面) 用球标选择某一过程报警,再点击“User Display ”,既可调用出与选择的过程报警有关的用户预定义的流程显示画面或操作画面。
(并不是所有的过程报警均有相应的显示画面) ●Clear Alarm *(删除当前过程报警信息) 用球标选择某一过程报警,再点击“Clear Alarm ”,既可删除所选择的过程报警信息。
(注意:此项功能仅向工程师环境开放) ●Clear Page *(删除当前页中所有过程报警信息) 用球标点击过程报警信息页,再点击“Clear Page ”,既可删除所选择页中的所有过程报警信息。
(注意:此项功能仅向工程师环境开放) ●Block Detail (组态过程报警信息块的详细显示) 用球标选择某一过程报警,再点击“Block Detail ”,既可进入组态该过程报警的控制快的详细显示画面。
●Top Priority (报警级别最高的过程报警信息块的详细显示) 用球标点击“Top Priority “,既可进入当前过程中报警级别最高的报警相应的控制快的详细显示画面。
(注意:此项功能仅向工程师环境开放) ●用球标在报警信息页中快速双击,即可确认当前页中的所有过程报警信息在报警信息画面中,其顶部菜单中的主要功能有有:● 选择“F ile”菜单,并选择“Dismiss”,即可退出过程报警信息画面,返回流程显示画面。
● 选择“Dis play”菜单,并选择“Operations ”,进入操作画面后,选择“Horns ”,再选择“Mute Horns ”,即可将报警键盘的声响报警禁止掉。
● 未提到的其他功能,请不要去操作。
4. 历史数据查询在工程师环境下,通过选择Config →Historian →Scheduler进入历史库操作环境,选择“Schedule Historians”确认历史库hist01处于“ON”状态,否则应先选中相应历史库,尔后按底部的“START”见键,等待历史库为“ON”。
在上诉环境下选择Switch To→Data Display或在工程师环境下选择Config→Historian→Data Display进入历史数据查看环境,可查看具体的历史采样数据、浓缩数据、系统报警记录等,如要打印所选数据,可按顶部菜单“Reports”即可。
5.画面的修改当对某一幅画面进行修改后,要将画面拷贝到网络中的其他工作站的硬盘中去,具体操作如下:(以将AW0001上的/opt/dcs/das/disp/disp1.fdf拷到WP0002为例)# rmount WP5102 /rem/WP5102# cp /opt/dcs/das/disp/disp1.fdf /rem/WP5102/opt/dcs/das/disp/.# rumount WP0002第四章系统维护1.开机步骤由于I/A’s各站的操作系统为实时多用户操作系统UNIX,对开机、关机过程有一定的要求,非正常的开关机过程会对系统文件产生破坏作用,甚至造成死机。