工业机器人字论文
- 格式:docx
- 大小:146.18 KB
- 文档页数:5
第绪论1.1工业机器人研究的目的和意义工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。
自从1962年美国研制出世界上第一台工业机器人以来,机器人技术及其产品发展很快,已成为柔性制造系统( FMS) 、自动化工厂( FA) 、计算机集成制造系统(CIMS)的自动化工具。
广泛采用工业机器人,不仅可提高产品的质量与数量,而且保障人身安全、改善劳动环境、减轻劳动强度、提高劳动生产率、节约材料消耗以及降低生产成本有着十分重要的意义。
和计算机、网络技术一样,工业机器人的广泛应用正在日益改变着人类的生产和生活方式。
20世纪80年代以来,工业机器人技术逐渐成熟,并很快得到推广,目前已经在工业生产的许多领域得到应用。
在工业机器人逐渐得到推广和普及的过程中,下面三个方面的技术进步起着非常重要的作用。
1.驱动方式的改变20世纪70年代后期,日本安川电动机公司研制开发出了第一台全电动的工业机器人,而此前的工业机器人基本上采用液压驱动方式。
与采用液压驱动的机器人相比,采用伺服电动机驱动的机器人在响应速度、精度、灵活性等方面都有很大提高,因此,也逐步代替了采用液压驱动的机器人,成为工业机器人驱动方式的主流。
在此过程中,谐波减速器、R V减速器等高性能减速机构的发展也功不可没。
近年来,交流伺服驱动已经逐渐代替传统的直流伺服驱动方式,直线电动机等新型驱动方式在许多应用领域也有了长足发展。
2.信息处理速度的提高机器人的动作通常是通过机器人各个关节的驱动电动机的运动而实现楼渊:四自由度圆柱坐标机器人设计的。
为了使机器人完成各种复杂动作,机器人控制器需要进行大量计算,并在此基础上向机器人的各个关节的驱动电动机发出必要的控制指令。
随着信息技术的不断发展,C P U的计算能力有了很大提高,机器人控制器的性能也有了很大提高,高性能机器人控制器甚至可以同时控制20多个关节。
机器人控制器性能的提高也进一步促进了工业机器人本身性能的提高,并扩大了工业机器人的应用范围。
工业机器人引言工业机器人是一种能够自动执行复杂任务的可编程装置。
由于其高效、高精度和高稳定性,工业机器人已经在生产制造行业得到了广泛应用。
本文将介绍工业机器人的发展历程、工作原理、应用领域以及未来发展趋势。
发展历程工业机器人的历史可以追溯到20世纪60年代。
最早的工业机器人是由美国斯坦福大学的研究人员发明的,用于协助汽车制造。
在接下来的几十年中,工业机器人得到了许多技术创新和改进。
当今的工业机器人已经实现了许多先进功能,例如感知能力、人机协作和自主导航等。
工作原理工业机器人的工作原理通常包括以下几个关键步骤:1.感知环节:机器人通过各种传感器来感知外部环境,例如视觉传感器、力测传感器等。
这些传感器可以帮助机器人获取周围物体的位置、形状和状态等信息。
2.规划与控制:基于感知结果,机器人需要进行规划与控制,确定执行任务的路径和动作。
这通常通过预先编程或者机器学习等方法来实现。
3.执行任务:一旦机器人确定好路径和动作,它会自动执行任务。
机器人的执行通常包括移动、抓取、放置等动作。
应用领域工业机器人在许多领域都得到了广泛应用。
以下是一些常见的应用领域:制造业工业机器人在制造业中发挥着重要作用。
它们可以执行重复性的、危险的或繁重的任务,例如焊接、喷涂、装配等。
机器人的高精度和高效率可以大大提高生产效率和品质。
医疗保健工业机器人在医疗保健领域也有着广泛应用。
例如,在手术中,机器人可以辅助医生进行高精度的操作,从而提高手术成功率并减少风险。
物流和仓储工业机器人在物流和仓储领域可以帮助实现自动化的仓库操作。
机器人可以自动搬运货物、装载和卸载货车,大大提高了物流效率和准确性。
未来发展趋势工业机器人的未来发展趋势有以下几个方面:1.人机协作:未来的工业机器人将更加注重与人的合作。
机器人将能够与人类工作人员实现紧密的协作,相互补充优势,提高生产效率和安全性。
2.人工智能:随着人工智能技术的快速发展,工业机器人将具备更强的智能化能力。
工业机器人论文3000字引言近年来,中国工业机器人产业进入快速增长期,连续6年成为世界最大市场。
在工业机器人蓬勃发展的同时,当前存在的炒作、抢购、低端竞争等非理性现象引起了各界的关注。
专家说,机器人产业,作为“王冠上的珍珠制造业”,应积极追求自主创新,发展核心技术,促进智能制造业和提升制造业水平通过高质量的产品和服务,以避免重复的坏经验低价格和低水平竞争。
高端产业要避免陷入低端产业的泥潭工业机器人作为先进制造业的关键配套设备,将在中国制造向中国智能制造的过程中发挥重要作用。
但目前我国机器人产品主要处于中、低端,企业规模小、产品质量参差不齐等问题明显,主要依靠“性价比”而非核心技术打开市场,处于产业链的低端。
此外,由于缺乏严格的高科技标准,大量低端机器人产能蜂拥而至。
“十三五”更为严酷的国家重点研究项目“智能机器人”关键特殊推理专家组长赵杰,智能机器人产业发展分为三个阶段:第一阶段是2020或2021年,突破的基础和核心技术,促进创新能力的机器人,机器人技术的提高我们整个国家水平和行业;第二阶段为2025年,智能制造将进入互联智能阶段。
国内机器人技术应达到世界先进水平,国内机器人设备核心部件数量应超过50%。
到2030年,机器人产业的空心化问题将基本得到解决。
关键核心技术要自主可控,工业机器人的应用水平和安装数量要达到发达国家水平。
为了避免国内工业机器人在低端竞争中集群化的趋势,专家建议,首先打破产业边界,推进一体化创新,产生更多的新技术、新产品、新应用,营造良好的产业生态。
二是提高产品质量,避免低价竞争,有效解决影响产品质量提升的关键技术,以优质的产品和服务而不是过低的价格赢得市场。
三是瞄准细分市场,聚焦细分行业,打造满足大批量、细分制造业需求的机器人产品,实现差异化发展。
第四,深化产业链企业战略合作,建立互信、互利、平等、协作的商业模式,营造和谐健康的市场环境。
工业机器人论文8000字一、机电体化技术的应用现状(一)工业机器人。
工业机器人的出现在定程度上可替代人的劳动,对于高辐射、高噪声污染、高浓度有害气体的工作场合来说,工业机器人是个理想的选择。
工业机器人的发展经历了三个阶段,第一代工业机器人智能化程度较低,只能通过预设的程序进行简单的重复动作,无法应对多变的工作环境和工作岗位。
随着科技的发展,在第一代机器人的基础上通过各种传感器的应用使其可通过对环境信息的获取,分析、处理并反馈给动作单元,从而进行些适应性的工作,这种机器人虽然智能化程度较低,但已经在一些特定的领域得以成功应用。
在机电体化技术相对成熟的今天,第三代机器人的智能化水平已经得到了较大的提升,其可以通过强大的传感原件收集信息数据,并根据实际情况作出类似于人脑的判断,因此可以在多种环境下进行独立作业,但成本较高,在一定程度上限制了实际应用。
(二)分布式控制系统。
分布式控制系统是相对于集中式控制系统而言的,是通过台中央计算机对负责现场测控的多台计算机进行控制和指挥,由于其强大的功能和安全性,使其成为当前大型机电体化系统的主流技术根据实际情况分布式控制系统的层级可分为两级,三级或更多级,通过中央计算机完成对现场生产过程的实时监控,管理和操作控制等,同时,随着测控技术的不断发展与创新,分布式控制系统还可以对生产过程实现实时调度、在线最优化、生产计划统计管理等功能,成为一种集测、控、管于一体的综合系统,具有功能丰富、可靠性高、操作方便、低故障率、便于维护和可扩展等优点,因此使系统的可靠性大幅提高。
二、机电体化技术的发展趋势(一)人工智能化。
人工智能就是使工业机器人或数控机床模拟人脑的智力,使其在生产过程中具备定的推理判断、逻辑思维和自主决策的能力,可大幅提升工业生产过程的自动化程度,甚至实现真正的无人值守,对于降低人力成本,提高加工精度和工作效率具有十分重要的意义。
目前,人工智能已经不只是停留在概念上,因此可预见机电体化技术将向着人工智能化的方向发展。
关于工业机器人作文英文回答:Industrial robots have revolutionized the manufacturing industry in many ways. These machines are capable of performing repetitive tasks with precision and speed, increasing productivity and efficiency in factories. They have become an integral part of modern manufacturing processes.One advantage of industrial robots is their ability to work in hazardous environments. For example, in the automotive industry, robots are used to handle toxic chemicals and perform welding tasks that would be dangerous for human workers. This not only ensures the safety of workers but also increases the overall quality of the products.Industrial robots also have the advantage of being able to work continuously without the need for breaks or rest.This allows for round-the-clock production, which can significantly increase output and meet tight deadlines. In contrast, human workers may experience fatigue or make mistakes due to exhaustion, leading to decreased productivity.Furthermore, robots can perform tasks with consistent precision. They are programmed to follow specific instructions and can repeat the same motion over and over again with minimal variation. This level of accuracy is difficult to achieve consistently with human workers, who may be prone to errors or inconsistencies.In addition to their efficiency and precision, industrial robots can also be cost-effective. While the initial investment in purchasing and setting up the robots may be high, they can lead to long-term cost savings. Robots do not require salaries, benefits, or other expenses associated with human workers. They also have a longer lifespan and require less maintenance compared to human employees.However, it is important to note that industrial robots are not meant to replace human workers entirely. They are designed to complement human labor and perform tasks that are repetitive, dangerous, or require high precision. Human workers still play a crucial role in decision-making, problem-solving, and tasks that require creativity or adaptability.中文回答:工业机器人在许多方面彻底改变了制造业。
工业机器人的历史与发展现状和未来机器人的应用与发展趋势梁智茗摘要:随着科学技术的发展,现代工业越来越依赖自动化设备的辅助,繁重的工业生产也开始摆脱大量劳动力的使用,所以,工业机器人应运而生,作为一种高新技术产业,其为工业自动化水平的发展发挥了巨大作用,并且被广泛的运用到工业生产的方方面面。
机器人的出现与普及,不仅带动了社会经济水平的提高,也对未来工业生产与社会发展起到越来越重要的作用。
关键词:工业机器人,历史由来,发展与未来趋势1、工业机器人的由来与历史工业机器人是机器人的一种,机器人的概念最早由捷克斯洛伐克作家卡雷尔·恰佩克在其科幻小说《罗萨姆的机器人万能公司》的剧本中提出,其塑造了一个具有人的外表,特征和功能,并愿意为人类服务的机器人奴仆“Robota”。
根据这个定义,我们可以这样理解:“机器人是一个在三维空间中具有多自由度,并能实现诸多拟人动作和功能的机器”。
而工业机器人,顾名思义,则是在工业生产上应用的机器人。
1954年,美国戴尔沃最早提出了工业机器人的概念,并申请了专利,该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现,这就是所谓的示教再现机器人,现有的机器人差不多都采用这种控制方式,1959年,第一台工业机器人在美国诞生,开创了工业机器人发展的新纪元。
2、工业机器人的构造工业机器人由主体,驱动系统和控制系统三个基本部分组成,主体便是机座与执行单位,包括臂部与腕部和手部,有的机器人还配备有行走机构,大多数工业机器人拥有3至6个运动自由度,其自由度越高,机器人就越灵活,驱动装置和传动单位用以执行单位产生相应的动作,控制系统则是按照相应的程序对驱动和执行发出指令,并对机器人本体进行控制。
3、工业机器人发展现状伴随着科学技术的发展与进步,工业机器人发展过程主要分为三代,第一代为示教再现机器人,主要有机器手控制器与示教盒组成,可按预先设计好的程序和引导动作记录下的信息重复再现执行,该种类机器人在当今工业生产中使用最为广泛。
1 绪论工业机器人技术是近年来新技术发展的重要领域之一,是以微电子技术为主导的多种新兴技术与机械技术交叉、融合而成的一种综合的高新技术。
这一技术在工业、农业、国防、医疗卫生、办公自动化及生活服务等众多领域有着越来越多的应用。
工业机器人在提高产品质量、加快产品更新、提高生产效率、促进制造业的柔性化、增强企业和国家的竞争力等诸多方面具有举足轻重的地位,而且也成为广大工程技术人员迫切需要掌握的知识。
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。
工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
1.1工业机器人由来1920年捷克作家卡雷尔·查培克在其剧本《罗萨姆的万能机器人》中最早使用机器人一词,剧中机器人“Robot”这个词的本意是苦力,即剧作家笔下的一个具有人的外表,特征和功能的机器,是一种人造的劳力。
它是最早的工业机器人设想。
20世纪40年代中后期,机器人的研究与发明得到了更多人的关心与关注。
50年代以后,美国橡树岭国家实验室开始研究能搬运核原料的遥控操纵机械手,它是一种主从型控制系统,主机械手的运动。
系统中加入力反馈,可使操作者获知施加力的大小,主从机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。
1954年美国戴沃尔最早提出了工业机器人的概念,并申请了专利。
该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。
这就是所谓的示教再现机器人。
现有的机器人差不多都采用这种控制方式。
1959年UNIMATION公司的第一台工业机器人在美国诞生,开创了机器人发展的新纪元。
1.2机器人的分类机器人的分类方法很多,这里依据两个有代表性的分类方法列举机器人的分类。
工业机器人论文摘要精选1. 智能工业机器人的设计与实现随着科技的不断发展,智能机器人成为了现代制造业中的重要组成部分。
本论文通过对智能工业机器人的设计与实现进行研究,探讨了智能机器人的应用现状、技术特点和发展趋势,并利用ROS (机器人操作系统)平台开发了一款基于机器视觉和语音识别技术的智能工业机器人。
该机器人可以根据用户的指令完成各种不同的工作任务,例如物料搬运、零件装配等。
实验结果表明,所设计的机器人具备较好的智能性和实用性,可以在工业生产中起到很好的作用。
2. 工业机器人在装配领域的应用研究工业机器人在制造业中的应用已成为不可忽视的趋势,尤其是在装配领域中,机器人的应用越来越广泛。
本论文通过对国内外工业机器人装配应用的研究,详细介绍了工业机器人在装配领域的应用现状和发展趋势,探讨了机器人的自动化装配、灵活装配和协作装配等技术方案。
此外,还在某汽车制造厂进行了实验研究,验证了机器人在汽车零部件装配中的可行性和优越性。
实验结果表明,机器人能够提高装配效率、精度和质量,为工业制造业带来显著的经济和社会效益。
3. 基于视觉系统的工业机器人技术研究视觉系统是工业机器人中常见的感知技术,其具有无接触、高精度、高灵敏等优点,在工业制造领域中被广泛应用。
本论文通过对基于视觉系统的工业机器人技术进行研究,探讨了视觉系统在机器人控制、定位、检测和识别等方面的应用;详细介绍了机器视觉系统的组成结构、工作原理和算法流程;设计了一种基于视觉系统的机器人控制系统,并在实验中验证了该系统具有较好的控制效果和稳定性。
实验结果表明,机器视觉系统是一种先进的感知和控制技术,可以为工业制造提供有效的解决方案。
4. 工业机器人在机床自动化加工中的应用研究工业机器人在机床自动化加工领域中的应用也是比较广泛的。
本论文通过对工业机器人在机床自动化加工方面的应用进行研究,探讨了机器人在铣削、车削和激光加工等方面的应用场景和技术特点。
此外,还介绍了某汽车零部件制造企业引进机器人智能加工系统的案例,分析了其优势和可行性。
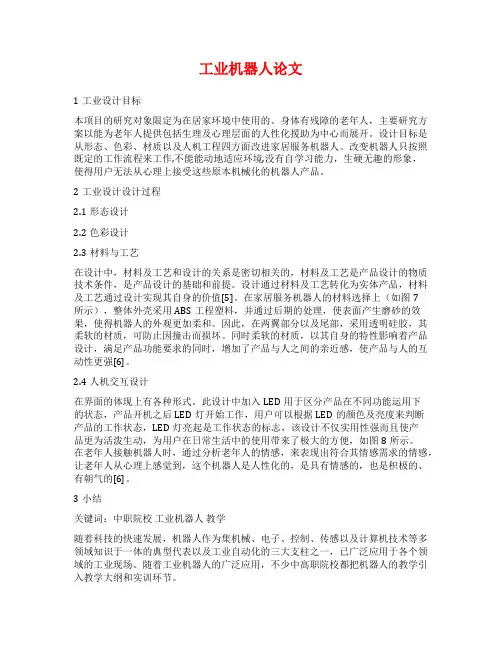
工业机器人论文1工业设计目标本项目的研究对象限定为在居家环境中使用的、身体有残障的老年人,主要研究方案以能为老年人提供包括生理及心理层面的人性化援助为中心而展开。
设计目标是从形态、色彩、材质以及人机工程四方面改进家居服务机器人。
改变机器人只按照既定的工作流程来工作,不能能动地适应环境,没有自学习能力,生硬无趣的形象,使得用户无法从心理上接受这些原本机械化的机器人产品。
2工业设计设计过程2.1形态设计2.2色彩设计2.3材料与工艺在设计中,材料及工艺和设计的关系是密切相关的,材料及工艺是产品设计的物质技术条件,是产品设计的基础和前提。
设计通过材料及工艺转化为实体产品,材料及工艺通过设计实现其自身的价值[5]。
在家居服务机器人的材料选择上(如图7所示),整体外壳采用ABS工程塑料,并通过后期的处理,使表面产生磨砂的效果,使得机器人的外观更加柔和。
因此,在两翼部分以及尾部,采用透明硅胶,其柔软的材质,可防止因撞击而损坏。
同时柔软的材质,以其自身的特性影响着产品设计,满足产品功能要求的同时,增加了产品与人之间的亲近感,使产品与人的互动性更强[6]。
2.4人机交互设计在界面的体现上有各种形式。
此设计中加入LED用于区分产品在不同功能运用下的状态,产品开机之后LED灯开始工作,用户可以根据LED的颜色及亮度来判断产品的工作状态,LED灯亮起是工作状态的标志,该设计不仅实用性强而且使产品更为活泼生动,为用户在日常生活中的使用带来了极大的方便,如图8所示。
在老年人接触机器人时,通过分析老年人的情感,来表现出符合其情感需求的情感,让老年人从心理上感觉到,这个机器人是人性化的,是具有情感的,也是积极的、有朝气的[6]。
3小结关键词:中职院校工业机器人教学随着科技的快速发展,机器人作为集机械、电子、控制、传感以及计算机技术等多领域知识于一体的典型代表以及工业自动化的三大支柱之一,已广泛应用于各个领域的工业现场。
随着工业机器人的广泛应用,不少中高职院校都把机器人的教学引入教学大纲和实训环节。
关于工业机器人的文章
《嘿,工业机器人!》
嘿,大家好呀!今天咱就来唠唠工业机器人这玩意儿。
说起来工业机器人啊,那真是个了不起的存在!以前咱老觉得工厂里都是工人师傅们汗流浃背地干活,但自从有了这工业机器人,局面可就大不一样咯!
你想啊,那些又苦又累又危险的活儿,现在都可以交给机器人去干啦!它们不怕累,不用吃饭喝水休息,就那么一刻不停地干着活,简直就是不知疲倦的“工作狂”。
有一次我去参观个工厂,那机器人干活的速度快得哟,就跟闪电一样。
我眼睛都还没眨几下,它就已经完成好几个步骤啦。
这可真是让我大开眼界,我当时就想,要是我有这本事,那得干多少事儿啊!
而且这些机器人还特别准确,不像咱人有时候还会犯迷糊出错。
它们就像精准的机器战士,每一个动作都精确到位,那活儿干得是又漂亮又标准。
我还听说啊,有些工厂因为有了工业机器人,效率大大提高,成本还
降低了不少呢!老板们笑得嘴都合不拢啦!以前可能需要好多人干的事儿,现在几个机器人就搞定了。
不过呢,有时候我也会想,这机器人这么厉害,那以后不会把咱人类的工作都抢了吧?但转念一想,嘿,咱人类也不是吃素的呀!我们可以去做那些更需要创造力和智慧的工作嘛,和机器人和谐共处,共同创造美好未来呀!
其实工业机器人不仅改变了工厂,也改变了我们的生活。
它们制造出来的产品质量更好,价格可能更实惠,咱们消费者不就享福啦。
总之呢,工业机器人是个超有意思的存在。
它们让我们的生活变得更高效、更便捷。
我是越来越期待它们还能给我们带来什么惊喜啦!以后啊,说不定走在路上,到处都是机器人在服务,那场面得多有意思啊!哈哈,让我们一起期待那个未来的到来吧!。
工业机器人论文摘要:工业机器人是一种在工业生产中广泛应用的自动化设备,其作用包括提高生产效率、减少人力投入、改善产品质量等。
本论文主要探讨了工业机器人的定义、分类、应用领域以及对生产效率和人力资源的影响。
通过对工业机器人技术的分析与研究,为推动工业机器人的发展和应用提供了理论支持。
引言:随着工业自动化的推进,工业机器人作为一种自动化设备在工业生产中发挥着重要的作用。
工业机器人是指一种可以自动执行工业任务的机器人,其优势在于可靠性高、准确性强以及在危险环境下能够代替人类进行工作。
在工业生产中广泛应用的工业机器人包括装配机器人、焊接机器人、搬运机器人等,这些机器人不仅提高了生产效率,还改善了产品质量,减少了劳动力的投入。
一、工业机器人的定义与分类1.1 工业机器人的定义工业机器人是指用于生产领域的自动化机器人,具备一定的智能化功能和执行工业任务的能力。
工业机器人具有自主性、灵活性和适应性等特点,能够完成复杂的生产操作任务,提高生产效率。
1.2 工业机器人的分类根据任务执行特点和结构形式,工业机器人可分为多种不同类型,常见的工业机器人包括以下几类:- 装配机器人:主要用于产品的装配和组装过程,能够完成各种细致精密的组装任务。
- 焊接机器人:主要应用于焊接工艺,能够实现高效、精确的焊接作业。
- 搬运机器人:主要用于物料搬运和工件转移,能够减少劳动强度,提高生产效率。
- 涂装机器人:主要应用于涂装行业,能够实现自动喷涂,提高产品质量。
- 检测机器人:主要用于产品质量检测,能够提高生产的可靠性和一致性。
二、工业机器人的应用领域工业机器人在各个行业的应用已经越来越广泛,以下是一些常见的工业机器人应用领域:2.1 汽车制造行业工业机器人在汽车制造行业中起到了重要的推动作用。
在汽车组装过程中,工业机器人可以完成各种复杂的装配和焊接工作,提高生产效率,减少人力投入。
2.2 电子制造行业电子产品的制造过程需要进行大量的焊接和组装工作,工业机器人在电子制造行业中起到了重要的作用。
一、工业机器人的定义与开展机器人问世已有几十年,但没有一个统一的意见。
原因之一是机器人还在开展,另一原因主要是因为机器人涉与到了人的概念,成为一个难以回答的哲学问题。
也许正是由于机器人定义的模糊,才给了人们充分的想象和创造空间。
1987年国际标准化组织(ISO)对工业机器人的定义:工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的编程操作机。
我国科学家对机器人的定义是:机器人是一种自动化的机器,这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器〃。
尽管各国定义不同,但根本上指明了工业机器人所具有的三个特性:1)是一种自动机械装置,可以搬运材料、零件或完成多种操作和动作功能;2)可以再编程,程序流程可变,即具有柔性(适应性〕。
3)可以在无人参与下,自动完成多种操作或动作功能,即具有通用性。
1954年,美国人George C. Devol提出了第一个工业机器人方案并在1956年获得美国专利。
1960年,Conder公司购置专利并制造了样机。
1961年,Unimation公司〔通用机械公司〕成立,生产和销售了第一台工业机器“Unimate,即万能自动之意。
1962年,A.M.F.〔机械与铸造〕公司,研制出一台数控自动通用机,取名“Versatra'h,即多用途搬运之意并以“ Industrial Robot为商品广告投入市场。
日本、西欧各国、前联也相断引进或自行研制工业机器人。
60〜70年代是机器技术获得巨大开展的阶段。
80年代,机器人在兴旺国家的工业量普与应用,如焊接、喷漆、搬运、装配。
并向各个领域拓展,如航天、水下、排险、核工业等,机器人的感知技术得到相应的开展,产生第二代机器人。
90年代,机器人技术在兴旺国家应用更为广泛,如军用、医疗、服务、娱乐等领域,并开始向智能型〔第三代〕机器人开展。
二、工业机器人的组成工业机器人一般由主构架〔手臂〕、手腕、驱动系统、测量系统、控制器与传感器等组成。
过去两百年的科技进步一直与人类深深的技术恐惧如影随形。
第一次工业革命,纺织机的出现让几百万纺织工失业,蒸汽机的发明导致技术工人因为害怕失业而占领工厂、打砸机器。
第二次世界大战中,人们见证了技术的进步可能带来的巨大杀伤力,于是人们开始怀疑,当人类有能力毁灭世界的时候,世界会变成何种模样。
二十一世纪,数字技术崛起,AI与大数据的加持让人类越来越清晰地看到机器人取代人类的可能性。
科技创新如何影响就业?这个话题又一次成为讨论的焦点。
数字技术的广泛应用是否会造成大面积失业?飞速的技术发展会怎么重塑工作的本质?在数字时代,人们应该怎样保持自己的竞争力?带着这些问题,斯德哥尔摩大学的经济学家Anders Akerman、芝加哥大学的经济学家Ingvil Gaarder、Magne Mogstad合力展开研究,着力分析了宽带网络这种数字技术,试图探索宽带网络是否提高了劳动者的生产率,提升了他们的时薪和就业率。
本文将简单介绍此项研究的来龙去脉及其带来的启示。
数据与方法此项研究主要基于一组挪威企业互联网接入率的数据。
研究者们试图通过观察企业互联网接入率与工人时薪和就业率的关系,探索宽带网络对工人生产率的影响。
为了更细致地讨论这种关系,研究者将工人分成了高技术工人(skilled workers)(拥有大专/本科及以上学历的工人)和中低技术工人(unskilled workers)(高中及以下学历)。
为了处理宽带网技术接入的内生性问题:即自主选择接入互联网的企业可能本身就是高技术工人更密集,劳动生产率更高的企业,研究者们利用挪威政府开展的随机铺设宽带设施的公共项目下企业的互联网接入率作为样本,将此项目随机铺设的宽带接入点作为工具变量,据此研究接入宽带如何影响不同种类工人的时薪和就业率,及这两个变量反映出的生产率变化。
研究结果研究结果显示,宽带网络对于高技术工人有正面助益,但是会损害中低技术工人的利益。
宽带接入率每上升10%,高技术工人的时薪会上升0.2%,而中低技术工人的时薪则会减少0.07%。
工业机器人的发展现状及趋势论文引言工业机器人是指用于代替或辅助人类完成生产线工作的机器人。
自20世纪60年代问世以来,工业机器人已经成为现代制造业的重要组成部分。
随着科技的不断进步和人工智能的发展,工业机器人行业也在不断演进和进步。
本文将探讨工业机器人的发展现状以及未来的趋势。
发展现状技术进步工业机器人的发展离不开科技的进步。
近年来,人工智能、机器视觉和机器学习等技术的飞速发展,为工业机器人带来了许多新的应用和功能。
现代工业机器人不仅能够完成简单的重复性工作,还能够学习和适应环境的变化,具备更高的灵活性和智能化。
应用领域扩展工业机器人的应用领域也在不断扩展。
最初,工业机器人主要应用于汽车制造业,用于完成装配和焊接等重复性工作。
但随着技术的进步和应用的推广,工业机器人已经涉足到电子、食品、医药等不同领域。
例如,在电子制造业中,工业机器人可用于半导体芯片的组装和测试;在食品行业,工业机器人可以实现食品包装和质检;在医药领域,工业机器人可以辅助手术和药物研发等工作。
人机协作人机协作是工业机器人发展的一个重要趋势。
传统的工业机器人通常需要独立工作,与人类操作员分开。
然而,随着人工智能和机器学习技术的发展,工业机器人可以与人类操作员进行合作和交互。
这种人机协作的模式可以提高生产效率和灵活性,同时也减少了工作中的安全风险。
发展趋势灵活性和适应性未来的工业机器人将具备更高的灵活性和适应性。
传统的工业机器人通常是针对特定任务而设计的,难以适应环境的变化和需求的变化。
然而,未来的工业机器人将具备更强的学习能力和自适应能力,能够根据实际情况做出智能决策并调整工作模式。
智能化和自主化随着人工智能技术的发展,工业机器人将变得更加智能化和自主化。
未来的工业机器人将能够学习和适应新的工作场景,能够独立做出决策并解决问题。
同时,人工智能技术还可以帮助工业机器人进行自主学习和优化,提高工作效率和品质。
数据驱动和分析数据驱动和分析是未来工业机器人发展的重要方向。
工业机器人技术毕业论文范文现如今,随着社会经济发展,机器人开始被广泛应用于各行各业中,替工人进行一些复杂、繁重的体力劳动,能减轻人们的工作负担。
下面是由店铺整理的工业机器人技术论文范文,希望能对大家有所帮助!工业机器人技术论文范文篇一:《浅谈工业机器人在工业生产中的应用》工业机器人是面向工业领域的多关节机械手或多自由度的机器人。
工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
就工业机器人在工业生产中的应用进行探讨。
关键词:工业机器人应用工业1 引言工业机器人最早应用于汽车制造工业,常用于焊接,喷漆,上、下料和搬运。
工业机器人延伸和扩大了人的手、足和大脑功能,它可代替人从事危险、有害、有毒、低温和高热等恶劣环境中的工作;代替人完成繁重、单调的重复劳动,提高劳动生产率,保证产品质量。
工业机器人与数控加工中心、自动搬运小车以及自动检测系统可组成柔性制造系统和计算机集成制造系统,实现生产自动化。
2 工业机器人的主要运用(1)恶劣工作环境及危险工作军事领域及核工业领域有些作业是有害于人体健康并危及生命,或不安全因素很大而不宜由人去做的作业,用工业机器人去做最合适。
例如核工厂设备的检验和维修机器人,核工业上沸腾水式反应堆燃料自动交换机。
(2)特殊作业场合和极限作业火山探险、深海探密和空间探索等领域对于人类来说是力所不能及的,只有机器人才能进行作业。
如航天飞机上用来回收卫星的操作臂;用于海底采矿和打捞的遥控海洋作业机器人。
(3)自动化生产领域早期的工业机器人在生产上主要用于机床上、下料,点焊和喷漆。
用得最多的制造工业包括电机制造、汽车制造、塑料成形、通用机械制造和金属加工等工业。
随着柔性自动化的出现,机器人在自动化生产领域扮演了更重要的角色。
下面主要针对工业机器人在自动化生产领域的应用进行简单介绍。
工业机器人的历史与发展现状和未来机器人的应用与发展趋势梁智茗摘要:随着科学技术的发展,现代工业越来越依赖自动化设备的辅助,繁重的工业生产也开始摆脱大量劳动力的使用,所以,工业机器人应运而生,作为一种高新技术产业,其为工业自动化水平的发展发挥了巨大作用,并且被广泛的运用到工业生产的方方面面。
机器人的出现与普及,不仅带动了社会经济水平的提高,也对未来工业生产与社会发展起到越来越重要的作用。
关键词:工业机器人,历史由来,发展与未来趋势1、工业机器人的由来与历史工业机器人是机器人的一种,机器人的概念最早由捷克斯洛伐克作家卡雷尔·恰佩克在其科幻小说《罗萨姆的机器人万能公司》的剧本中提出,其塑造了一个具有人的外表,特征和功能,并愿意为人类服务的机器人奴仆“Robota”。
根据这个定义,我们可以这样理解:“机器人是一个在三维空间中具有多自由度,并能实现诸多拟人动作和功能的机器”。
而工业机器人,顾名思义,则是在工业生产上应用的机器人。
1954年,美国戴尔沃最早提出了工业机器人的概念,并申请了专利,该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现,这就是所谓的示教再现机器人,现有的机器人差不多都采用这种控制方式,1959年,第一台工业机器人在美国诞生,开创了工业机器人发展的新纪元。
2、工业机器人的构造工业机器人由主体,驱动系统和控制系统三个基本部分组成,主体便是机座与执行单位,包括臂部与腕部和手部,有的机器人还配备有行走机构,大多数工业机器人拥有3至6个运动自由度,其自由度越高,机器人就越灵活,驱动装置和传动单位用以执行单位产生相应的动作,控制系统则是按照相应的程序对驱动和执行发出指令,并对机器人本体进行控制。
3、工业机器人发展现状伴随着科学技术的发展与进步,工业机器人发展过程主要分为三代,第一代为示教再现机器人,主要有机器手控制器与示教盒组成,可按预先设计好的程序和引导动作记录下的信息重复再现执行,该种类机器人在当今工业生产中使用最为广泛。
工业机器人论文了解工业机器人班级: 机制0803学号: 25姓名: 杜帆1.什么是工业机器人工业机器人是面向工业领域的多关节机械手或多自由度的机器人。
工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
戴沃尔提出的工业机器人有以下特点:将数控机床的伺服轴与遥控操纵器的连杆机构联接在一起,预先设定的机械手动作经编程输入后,系统就可以离开人的辅助而独立运行。
这种机器人还可以接受示教而完成各种简单的重复动作,示教过程中,机械手可依次通过工作任务的各个位置,这些位置序列全部记录在存储器内,任务的执行过程中,机器人的各个关节在伺服驱动下依次再现上述位置,故这种机器人的主要技术功能被称为“可编程”和“示教再现”。
1962年美国推出的一些工业机器人的控制方式与数控机床大致相似,但外形主要由类似人的手和臂组成。
后来,出现了具有视觉传感器的、能识别与定位的工业机器人系统。
当今工业机器人技术正逐渐向着具有行走能力、具有多种感觉能力、具有较强的对作业环境的自适应能力的方面发展。
目前,对全球机器人技术的发展最有影响的国家应该是美国和日本。
美国在工业机器人技术的综合研究水平上仍处于领先地位,而日本生产的工业机器人在数量、种类方面则居世界首位。
2.工业机器人的应用随着高新技术的发展,各种类型的军用机器人已经大量涌现,一些技术发达的国家相继研制了智能程度高、动作灵活、应用广泛的军用机器人。
目前军用机器人主要是作为作战武器和保障武器使用。
在恶劣的环境下,机器人的承受能力大大超过载人系统,并且能完成许多载人系统无法完成的工作,如运输机器人可以在核化条件下工作,也可以在炮火下及时进行战场救护。
在地面上,机器人为联合国维和部队排除爆炸物、扫除地雷;在波黑战场上,无人机大显身手;在海洋中,机器人帮助人清除水雷、探索海底秘密;在宇宙空间,机器人成了火星考察的明星。
工业机器人字论文
Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
工业机器人的历史与发展现状和未来机器人的应用与发展趋势
梁智茗
摘要:随着科学技术的发展,现代工业越来越依赖自动化设备的辅助,繁重的工业生产也开始摆脱大量劳动力的使用,所以,工业机器人应运而生,作为一种高新技术产业,其为工业自动化水平的发展发挥了巨大作用,并且被广泛的运用到工业生产的方方面面。
机器人的出现与普及,不仅带动了社会经济水平的提高,也对未来工业生产与社会发展起到越来越重要的作用。
关键词:工业机器人,历史由来,发展与未来趋势
1、工业机器人的由来与历史
工业机器人是机器人的一种,机器人的概念最早由捷克斯洛伐克作家卡雷尔·恰佩克在其科幻小说《罗萨姆的机器人万能公司》的剧本中提出,其塑造了一个具有人的外表,特征和功能,并愿意为人类服务的机器人奴仆“Robota”。
根据这个定义,我们可以这样理解:“机器人是一个在三维空间中具有多自由度,并能实现诸多拟人动作和功能的机器”。
而工业机器人,顾名思义,则是在工业生产上应用的机器人。
1954年,美国戴尔沃最早提出了工业机器人的概念,并申请了专利,该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现,这就是所谓的示教再现机器人,现有的机器人差不多都采用这种控制方式,1959年,第一台工业机器人在美国诞生,开创了工业机器人发展的新纪元。
2、工业机器人的构造
工业机器人由主体,驱动系统和控制系统三个基本部分组成,主体便是机座与执行单位,包括臂部与腕部和手部,有的机器人还配备有行走机构,大多数工业机器人拥有3至6个运动自由度,其自由度越高,机器人就越灵活,驱动装置和传动单位用以执行单位产生相应的动作,控制系统则是按照相应的程序对驱动和执行发出指令,并对机器人本体进行控制。
3、工业机器人发展现状
伴随着科学技术的发展与进步,工业机器人发展过程主要分为三代,第一代为示教再现机器人,主要有机器手控制器与示教盒组成,可按预先设计好的程序和引导动作记录下的信息重复再现执行,该种类机器人在当今工业生产中使用最为广泛。
第二代为感觉型机器人,其通过自身配备的传感器对外界信息进行反馈,目前还处于应用阶段,第三代则为智能型机器人,其具备感知和理解外部信息的能力,具有高度智能化和灵活性强的特点,目前尚处于实验和研究阶段。
我国工业机器人发展大致经历了三个阶段,70年代萌芽期,80年代开发期和90年代应用化期。
目前,根据有关资料显示,中国正在服役的工业机器人已占全球总量的10%左右,2015年中国市场工业机器人销量达68556台,同比增长20.71%,工业机器人保有量达到24.4万台,2016年,中国工业机器人产量达到9万台,保有量达30万台,就整体而言,工业机器人在中国市场需求只增不减,在多种因素下,工业机器人发展速度将再次提速,步入历史上第二个繁荣期,或将比第一次浪潮还巨烈。
目前国际市场中主
要机器人公司分为日系和欧系,日系主要有安川、OTC、松下、FANLOC、不二越、川崎等公司品牌,欧系主要有德国KUKA、CLOOS、瑞典的ABB和意大利的COPU公司,主流机器人四大家族安川、ABB、发那科、与KUKA,市场占有率超过50%,生产规模大,成本低,产品线丰富,能应付各种主流应用,产品性能代表世界先进水平,系统集成占据高端与主导地位,尤其在汽车产业与整个车厂形成战略性合作关系。
4工业机器人的应用
随着工业机器人发展的深度与广度以及机器人智能水平的提高,工业机器人在众多领域得到了应用,从传统的汽车制造领域向非制造领域延伸,凡是枯燥的、危险的、有毒有害的工作,都可由机器人大显身手,除了广泛运用于制造业领域外,还在资源勘探开发、抢险救灾、医疗服务、家庭娱乐、军事国防与航天飞行等其他领域得到了广泛应用。
机器人是工业和非产业界重大生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备,工业机器人作为一种特殊的自动化设备,具备智能技术,所以工业机器人在传统产业的应用将大大提升企业产品的竞争力,促进产品更新换代,对国家经济产生巨大推动作用,促进国家可持续发展。
5、工业机器人的未来趋势
未来10年,工业机器人将更广泛的运用于人类生活的方方面面,随着科学技术的发展,更多具备高度自由化,智能化的机器人将走进人们的日常生活中,服务于人类生活的方方面面。
而如今,从谷歌公司的智能机器人AlphaGo打败中国围棋大师柯洁,到人类历史上首个拥有公民身份
的机器人索菲亚,再到如今我国“上有玉兔九天揽月,下有蛟龙大洋深潜”,机器人正慢慢渗透进人类的文明生活中,在方便人类日常生活的同时,也为国家工业生产和国防科研起到举足轻重的作用,在未来,随着中国制造2025的深入,机器人会向着高度智能化,完美化,灵活先进的趋势发展,将会有更多的智能机器人走进国人的生活当中,对我国社会经济发展起到巨大的推动作用。
【参考文献】
【1】《2014-2018年中国工业机器人行业产销需求预测与转型升级分析报告》
【2】《2018年中国全球机器人行业发展现状及未来发展趋势分析》【3】陈樵,《工业机器人的研究进展》,宁波大学科学技术学院。