自动控制系统的过渡过程2
- 格式:ppt
- 大小:705.50 KB
- 文档页数:15
自动控制原理过渡过程知识点总结自动控制原理是探讨如何在一个系统中实现自动调节和控制的科学。
过渡过程是控制系统响应被刺激后从一种稳态进入另一种稳态的过程。
在自动控制原理中,了解和掌握过渡过程的知识点是非常重要的。
本文将对自动控制原理过渡过程的知识点进行总结和整理。
一、过渡过程的定义过渡过程是指当控制系统从一种稳态响应到另一种稳态时所经历的过程。
它反映了系统的响应速度、稳定性和准确性等特性。
过渡过程通常可以分为三个阶段,即超调过程、振荡过程和稳定过程。
二、超调过程超调过程是指过渡过程中系统响应超出稳态值的现象。
具体来说,当输入信号发生变化时,系统的输出信号会出现超过预定值的情况。
超调过程的发生主要是由于控制系统的临界增益过大引起,过程中系统的阶跃响应会出现明显的超调量。
三、振荡过程振荡过程是指过渡过程中系统因不断超调而产生的来回振荡的现象。
在振荡过程中,系统的输出信号会不断地在目标值附近波动,形成一种周期性的振荡。
振荡过程的发生主要是由于控制系统的增益过大或者控制过程中存在滞后引起的。
四、稳定过程稳定过程是指过渡过程中系统响应逐渐趋于目标值并保持在一定范围内的过程。
在稳定过程中,系统的输出信号会逐渐趋于平稳状态,并与目标值之间存在一定的偏差。
稳定过程的发生主要是由于控制系统的增益逐渐减小或者控制过程中存在一定的调节机制。
五、过渡过程的影响因素过渡过程的特性受到多种因素的影响,主要包括控制系统的结构、控制对象的特性以及输入信号的变化等。
合理地选择控制系统的结构和参数,调整输入信号的变化方式,都可以对过渡过程的特性进行调节和优化。
六、过渡过程的改进方法针对过渡过程中出现的超调和振荡等问题,可以采取一系列的改进方法进行调节。
例如,可以通过合理选择控制系统的增益和时间常数,适当调整控制器的参数,来减小超调和振荡的发生。
此外,还可以采用自适应控制、模糊控制等先进控制算法来改进过渡过程的特性。
综上所述,过渡过程是自动控制原理中非常重要的一部分,它反映了控制系统的稳定性和响应速度。
2024年化工自动化控制仪表理论考试试题及答案1、【单选题】()决定了电磁阀的密封结构。
(B)A、工作压力B、介质性质C、工作温度2、【单选题】CENTUMCS3000系统中的回路调整画面中,HH是()。
(8)A、给定值B、高高报警设定值C、输出值3、【单选题】ECS700系统是()公司的DCS产品。
(B)A、H oneywelB、浙江中控C、F0XB0R04、【单选题】“?/h;L/h”这些符号都是表示流量的单位,它们表示的是()流量的单位。
(B)A、质量B、体积C、速度5、【单选题】一般情况下,控制器参数整定不合理会产生周期性的激烈振荡。
其中()引起振荡周期最短。
(八)A、积分时间过小B、比例度过小C、微分时间过大6、【单选题】下列叙述中,正确的是()。
(八)A、阀杆行程与阀门定位器的输入信号大小成正比B、阀门定位器的输出信号大小与输入信号的大小成正比C、阀杆行程与阀门定位器的输出信号大小成正比7、【单选题】下列热电偶中热电势最大,灵敏度最高的是。
型热电偶。
(C)A、KB、SC、E8、【单选题】下面关于分程控制回路的描述中错误的是()。
(D)A、一台控制器的输出可以同时控制两台甚至两台以上的控制阀B、控制器的输出信号被分割成若干个信号范围段C、输出信号的分段一般是由控制阀来实现的D、由每一段信号去控制一台控制阀9、【单选题】下面是关于绝对压力的表达式,其中正确的表达式是()。
(C)A、P绝=P表-P大B、P绝二P大+P负。
C、P绝=P大-P负10、【单选题】串级控制系统中,副控制器的作用方式与以下哪个无关()。
(八)A、主对象特性B、副对象特性C、执行器的气开、气关形式11、【单选题】串级控制系统能克服调节对象的纯滞后,在串级控制系统中,有纯滞后的对象应放在()。
(八)A、主回路B、副回路C、主、副回路12、【单选题】为减小压力损失,节省能源,较合适的S值应为Oo(B)A、S>0.6B、S=O.1C、S=O.3-0.613、【单选题】关小与调节阀串联的切断阀,会使可调比和流量特性变()。

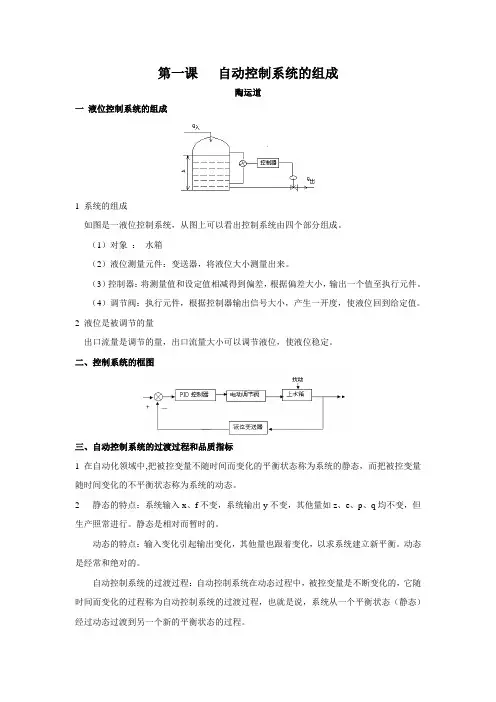
第一课自动控制系统的组成陶运道一液位控制系统的组成1 系统的组成如图是一液位控制系统,从图上可以看出控制系统由四个部分组成。
(1)对象:水箱(2)液位测量元件:变送器,将液位大小测量出来。
(3)控制器:将测量值和设定值相减得到偏差,根据偏差大小,输出一个值至执行元件。
(4)调节阀:执行元件,根据控制器输出信号大小,产生一开度,使液位回到给定值。
2 液位是被调节的量出口流量是调节的量,出口流量大小可以调节液位,使液位稳定。
二、控制系统的框图三、自动控制系统的过渡过程和品质指标1 在自动化领域中,把被控变量不随时间而变化的平衡状态称为系统的静态,而把被控变量随时间变化的不平衡状态称为系统的动态。
2 静态的特点:系统输入x、f不变,系统输出y不变,其他量如z、e、p、q均不变,但生产照常进行。
静态是相对而暂时的。
动态的特点:输入变化引起输出变化,其他量也跟着变化,以求系统建立新平衡。
动态是经常和绝对的。
自动控制系统的过渡过程:自动控制系统在动态过程中,被控变量是不断变化的,它随时间而变化的过程称为自动控制系统的过渡过程,也就是说,系统从一个平衡状态(静态)经过动态过渡到另一个新的平衡状态的过程。
3 干拢的形式系统在过渡过程中,被控变量随时间的变化规律首先取决于作用于系统的干扰形式。
在生产中,出现的干扰是没有固定形式的,且多半属于随机性质。
在分析和设计控制系统时,为了安全和方便,常选择一些定型的干扰形式,其中常用的是阶跃干扰。
阶跃干扰(阶跃输入)的特点:比较突然、比较危险、对被控变量的影响最大,如果一个系统,能有效地克服这类干扰,对其他干扰就能很好地克服,同时数学处理和分析简单。
4 过渡过程的基本形式以上过渡过程的四种形式可以归纳为三类。
(1)过渡过程(d)是发散的,称为不稳定过渡过程,应竭力避免。
(2)过渡过程(a)和(b)都是衰减的,稳为稳定过程。
被控变量经过一段时间后,逐渐趋向原来的或新的平衡状态,这是所希望的。
浅谈⾃动控制系统的过渡过程及品质指标⽬录⼀、系统的静态和动态 (1)⼆、⾃动控制系统的过渡过程 (1)三、⾃动控制系统的品质指标 (2)四、影响控制系统过渡过程品质的主要因素 (4)五、提交控制系统过渡过程及品质指标的措施 (4)六、结论 (5)浅谈⾃动控制系统的过渡过程及品质指标[内容摘要] ⾃动控制⼀般是指对系统的⼯业⽣产过程或是对具体的某⼀⼯艺⽣产流程,设备的⾃动控制,就是⽤⼀些⾃动装置与仪表等技术⼯具来代替⼈的操作,⾃动完成某些有规律的⽣产活动,这种⽤⾃动装置与仪表控制⽣产过程的⼯艺也称⽣产过程⾃动化。
[关键词]静态动态⾃运控制系统被控变量⼀、系统的静态和动态世间⼀切物质都处于相对的,⽭盾的运动状态,静是相对的,动是绝对的。
在定值控制系统中,把被控变量不随时间⽽变化的平衡状态称为静态(或稳态),⽽把被控变量随时间⽽变化的⾮平衡状态称为动态。
⼆、⾃动控制系统的过渡过程在⾃动控制系统的动态过程中,被控变量不断变化,它随时间⽽变化的过程称为⾃动控制系统的过渡过程,也是系统从⼀个平衡状态过渡到另⼀个平衡状态的过程。
⾃动控制系统的过渡过程是控制作⽤不断克服⼲扰作⽤的过程。
这种运动过程是控制作⽤与⼲扰作⽤这时⽭盾在系统内⽃争的过程,当这⼀对⽭盾达到统⼀时,过渡过程也就完成。
在⽣产中,出现的⼲扰是没有固定形式的,⼜将过渡过程分为以下四种:1、⾮振荡的单调过渡过程:被控变量在给定值的某⼀侧作缓慢变化,没有来回波动,最后稳定在某⼀数值上。
2、衰减振荡过程:被控变量上下波动,但幅度逐渐减⼩,最后稳定在某⼀数值上。
3、等幅振荡过程:被控变量上下波动,幅度逐渐变⼤。
4、发散振荡过程:被控变量始终在某⼀幅值的上下波动。
上述四种过渡过程的基本形成可以归纳为三类:(1)稳定的过渡过程;(2)不稳定的过渡过程;(3)过渡过程介于稳定和不稳定之间;三、⾃动控制系统的品质指标如图7-6:现在假定讨论的是定值控制系统,在t=0时,出现⼀个幅度为E=1的单位阶跃⼲扰。
常见的自动控制系统的工作流程1.自动控制系统首先接收输入信号,这些信号可以是来自传感器或其他设备的信息。
The automatic control system first receives input signals, which can be information from sensors or other devices.2.然后系统对输入信号进行处理,比如放大、滤波、数字化等。
The system then processes the input signals, such as amplifying, filtering, digitizing, etc.3.处理后的信号被送入控制器,根据预设的逻辑或算法进行判断和计算。
The processed signals are sent to the controller, which makes judgments and calculations based on preset logic or algorithms.4.控制器产生输出信号,控制执行器或执行装置去执行动作或调节参数。
The controller generates output signals to control actuators or execution devices to perform actions or adjust parameters.5.执行器根据输出信号执行相应的动作,比如启动电机、开关阀门等。
The actuator performs corresponding actions according to the output signals, such as starting a motor, opening a valve, etc.6.执行动作会影响系统的实际运行状态,从而产生反馈信号。
The actions taken will affect the actual operating stateof the system, thereby generating feedback signals.7.反馈信号被送回到控制器,用来修正和调整控制器的输出信号。