鲁地拉机组技术供水系统滤水器排污阀控制方式比较研究
- 格式:pdf
- 大小:200.79 KB
- 文档页数:1
浅谈鲁地拉生态流量水文站建设管理运行西部大开发已如火如荼的开展,现时期,水文改革与发展的诗篇已经翻开。
面对新世纪和现代化建设要求,水文作为国民经济和社会发展的重要基础性公益事业,作为水利事业的基础工作,水文测站建设管理运行对水利工程建设及社会经济发展具有重要意义。
推动水文测验方式方法变革、创新水文测站建设管理模式等方面作出了大胆探索和成功实践。
标签:水文测站建设管理运行水文是水利工作的基础,随着社会的进步、经济的发展,水文在国家社会发展中的作用日益凸显,水文已从单一的服务水利,发展扩大到服务社会经济各领域,“大水文”正逐步呈现。
水文测站作为长期连续搜集水、雨、沙情信息的基本场所,高标准、高质量、多功能的水文站建设对于搜集标准、可靠、全面的水文要素意义重大。
鲁地拉水文站在西部水电大开发的背景下诞生。
1、测站查勘设计根据鲁地拉电站可行性研究阶段的水文、工程规模咨询报告,为满足该电站运行洪水预报及运行期调度,积累设计数据资料,验证设计成果,业主云南华电集团有限公司与建设单位长江水文上游局(简称上游局)的相关单位和部门组织专业技术人员先后分两次在鲁地拉电站出口下游和观音岩水库尾水处河段进行了查勘。
经方案比选,最终提出《鲁地拉水文站初步设计报告》,报告设计满足了设站目的,保证测验资料精度,符合观测方便和测验资料计算整理简便的要求,项目包括水位、流量和降水等。
2、工程建设准备2.1 招标管理鲁地拉水文站作为水利工程专用水文站,功能要求全面、技术专业性强、工程总投资较大,建设单位高度重视招标工作。
工程建设前期建设单位向当地发展改革局呈报了土建工程的招标请示,批准后根据比选确定了招标代理机构,签订了委托招标合同,并最终由招标委托单位,确定施工单位,签订施工合同。
2.2 材料及设备采购2.2.1 施工材料根据建设单位与施工单位签订的相关合同规定,由施工单位对原材料自行采购,提交材料进场计划报监理工程师审批、执行,相应设备由施工单位与供应商洽谈并签订供货合同;建设单位负责督促并按计划对施工单位提供的有关材料进行抽样检验,对不合格材料坚决不予采用,确保工程质量。

第一章:水轮机进水阀机器操作系统一、进水阀的作用及设置条件1、进水阀作用:(!)岔管引水时构成检修机组的安全工作条件(2)停机时间少机组漏水量和缩短中心启动时间(3)防止飞逸事故的扩大2、进水阀的设置条件:(1)只有一根总管分给几台机组是,需在每台机组前设置进水阀(2)当H>120m的单元输水管可考虑设置进水阀(3)H<120m在进水口设置快速闸门3、对进水阀的技术要求:(1)工作可靠,操作简便(2)结构简单,体积小,重量轻(3)有严密的止水装置(4)进水阀本身及其操作机构的结构金额强度都应满足运行要求,能承受各种工况的的水压力和振动。
二、进水阀的型式及其主要构件常用水轮机进水阀:蝴蝶阀,球阀,筒形阀,闸阀。
1、蝶阀:(1)主要由圆形的阀体和可在其中绕轴转动的活门和其他部件组成。
据蝶阀阀轴的布置形式分为立轴和卧轴两种形式。
1)立轴的下部轴承容易沉积泥沙,需要定时清理2)立轴照做机构的操作机构位于阀体的顶部,利于防潮,维护检修,需要一个刚度很大的支座来支撑,结构复杂。
卧轴的操作机构可分部两侧or一侧,可用混泥土地基做基础,结构简单。
3)立轴的阀体组合面一般在一个水平位置,而卧轴则在一个垂直位置,安装和检修复杂。
4)立轴布置紧凑,体积小。
多泥沙电站优先选择卧轴蝶阀。
(2)主要部件:阀体,活门,阀轴,轴承,密封装置,锁锭装置,操作机构等。
(3)主要特点:结构简单,尺寸小,重量轻,造价低,操作方便;能动水关闭,可用作机组快速关闭的保护阀门,可防机组飞逸。
活门对水流流态有影响,有水力损失和汽蚀,封水性不好,密封件易损。
(4)目前蝶阀d min=8.23m,最高工作水头300m.。
一般是用于H<200m。
2、球阀(!)通常采用卧轴结构,对水流阻力小。
(2)主要构件:阀体,活门,阀轴,密封装置,操作机构等(3)特点:关闭严密,漏水少,之水混在活门转动时不易磨损,全开时水流条件好,无水力损失,无振动;操作力小,有利于动水紧急事故关闭。

鲁棒控制理论在水下机器人运动控制中的应用研究水下机器人一直是人类探索海洋的主要工具之一,它的运动控制是水下机器人技术研究的一个重要领域。
在复杂海洋环境中,通过鲁棒控制理论来提高水下机器人的运动控制精度和稳定性,是水下机器人技术发展的一个重要方向。
一、水下机器人的控制问题水下机器人的运动控制面临着许多挑战。
首先,海洋环境复杂多变,水下机器人在探测、定位、采样等应用过程中需要对海洋物理环境、生物环境、化学环境等都进行认知和适应。
其次,水下机器人自身的机电系统也存在很大的不确定性,如水下机器人的运动状态、海流和水压等环境因素都会对水下机器人的运动造成影响。
为了解决这些问题,需要对水下机器人进行的运动控制精度和稳定性的要求也非常高。
传统的PID控制方法虽然已经被广泛应用,但在应对水下机器人这类复杂的非线性系统时往往难以达到较高的控制精度和稳定性。
因此,探索一种新的、适用于水下机器人的控制方法就变得至关重要。
二、鲁棒控制理论在水下机器人中的应用鲁棒控制是一种抗干扰能力强的控制方法,它能有效地应对非线性和不确定性的系统,并且能够保证系统的稳定性和鲁棒性。
因此,鲁棒控制理论在水下机器人运动控制的应用中具有很大的潜力。
1. 鲁棒控制理论能够有效地应对水下机器人的非线性和不确定性鲁棒控制理论对于非线性和不确定性的系统有很强的适应性和鲁棒性,这正是它可以应用于水下机器人运动控制的主要原因。
在水下机器人的应用过程中,机器人的运动状态、水流和水压等环境因素都有很大的不确定性,因此需要一种能够应对这些不确定性的控制方法。
2. 鲁棒控制理论能够提高水下机器人的运动控制精度和稳定性鲁棒控制理论在应对水下机器人的非线性和不确定性时,能够提高运动控制的精度和稳定性。
例如,在水下机器人的路径规划任务中,鲁棒控制理论可以应对机器人运动状态的变化和环境因素的不确定性,从而提高路径规划的精度和稳定性。
3. 鲁棒控制理论可以提高水下机器人的自适应性和灵活性鲁棒控制理论可以对水下机器人的电机控制、姿态控制等进行自适应调节,具有很高的灵活性。

露天煤矿自动排水系统技术研究与实践徐飞史普东王文达发布时间:2023-07-03T02:28:42.565Z 来源:《中国科技信息》2023年8期作者:徐飞史普东王文达[导读] 为了解决胜利露天煤矿的疏水系统不能适应矿井的生产需要,自行开发了一种新型的桥梁式排水管系统,并阐述了其设计和工作机理,并对其在工程上的应用和经济效益进行了探讨。
经实际应用,该桥自动排水管网在试运转后,取得了良好的效果,既能有效地改善疏水系统的工作,又能保证矿井的安全生产。
山东科奥通电气科技有限公司山东省诸城市 262200摘要:为了解决胜利露天煤矿的疏水系统不能适应矿井的生产需要,自行开发了一种新型的桥梁式排水管系统,并阐述了其设计和工作机理,并对其在工程上的应用和经济效益进行了探讨。
经实际应用,该桥自动排水管网在试运转后,取得了良好的效果,既能有效地改善疏水系统的工作,又能保证矿井的安全生产。
关键词:露天矿;疏干水;桥式排水;工程实践;经济效果引言:随着采矿设备水平的不断提升,以及投资主体的观念的变化,露天煤矿的开采和开采方式也发生了很大的变化。
然而,目前露天煤矿的固有开采技术和采矿方式已经暴露出许多缺陷,对现有的工艺、设备进行优化已经成为一种必然。
神华北电胜利1矿位于锡林郭勒大草原的中心地带,是一座超大露天煤矿,其开采时的排水量很大。
通过对神华北电胜利1号露天煤矿的水文地质情况及疏水问题的分析,比较介绍自行设计施工的井下桥式自动排水系统,并就其在工程上的应用及经济效益进行了探讨,以期为其它露天煤矿的疏排水系统的改善和提高提供参考。
1胜利矿疏排水存在的问题胜利矿区自建成以来,已出现了多处斜坡崩塌的情况。
尤其是胜利露天矿的北段,由于地质结构的原因,虽然地下涌水量很少,但是由于其地质结构的特殊性,导致了地表的地下水和空气降雨沿着地表渗透;经常会在5#煤柱上产生具有水动力连接的软弱面体,导致5#煤柱标志层之上的边坡失稳定,严重威胁到了煤矿的生产组织和安全。

模糊-PID控制在污水处理厂液位控制中的研究及应用马朋速发布时间:2021-10-27T06:26:16.535Z 来源:《建筑学研究前沿》2021年15期作者:马朋速周宪林[导读] 随着水环境问题的日益突出,我国对于污水的处理也加大了力度,以此来实现我们的绿色环保的理念昆明滇池水务股份有限公司 650000摘要:随着水环境问题的日益突出,我国对于污水的处理也加大了力度,以此来实现我们的绿色环保的理念。
所以经过我国多年的污水治理,我国的污水治理行业相较于以往得到了巨大的发展,然而在污水处理的过程中我们常常会忽略液位等外部参数的重要性,仅仅关注内部工艺的运行参数对于污水处理能力的影响。
所以本文针对于液位控制的AAO工艺,提出传统的PID控制于模糊处理相结合,实现对于AAO工艺也为系统的自动控制,以此来实现提高污水处理的效率,确保我们污水处理工艺可以正常稳定。
关键词:液位控制;模糊-PID控制;污水处理水是我们是生命源泉,我们所有的生产生活都离不开水的村子啊,水是人们赖以生存的源泉,所有保护水资源对我们来说就格外的重要。
随着我们社会的发展,科技和工业在不断的提升,我们的环境也因为工业的快速大量发展而遭到破坏,尤其是水源污染,由于大部分工业机构不正确的处理污水导致我们的水源污染问题日益突出,所有对于日益严重的水污染问题,我国提出了保护水资源,进行可持续发展的要求。
所以我国近年来,污水处理行业得到了快速的发挥,对于城镇的污水处理效率在不断的提升。
目前我们主要针对于污水处理厂的液位控制,探究模糊-PID控制在污水处理厂液位控制中的研究及应用。
一、污水处理AAO技术相较于国外的污水处理,我国由于人口基数大,水源污染严重并且污水处理起步较晚。
所以我国需要加快对于水源污染的治理。
按照工艺流程划分,我国的污水处理可以分为以下几部分,预处理工艺、一级处理工艺、二级处理工艺、深度处理以及污泥处理。
预处理主要是将污水中较大的颗粒去除掉,防止在接下来输出水流时将我们的输水管堵塞,保护我们的污水处理设备。
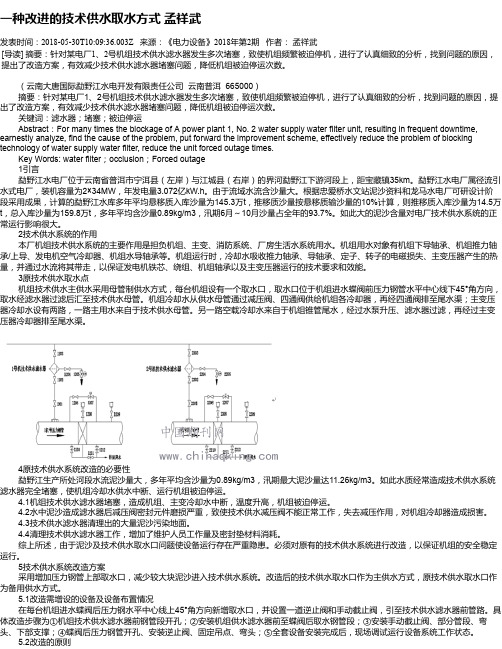
一种改进的技术供水取水方式孟祥武发表时间:2018-05-30T10:09:36.003Z 来源:《电力设备》2018年第2期作者:孟祥武[导读] 摘要:针对某电厂1、2号机组技术供水滤水器发生多次堵塞,致使机组频繁被迫停机,进行了认真细致的分析,找到问题的原因,提出了改造方案,有效减少技术供水滤水器堵塞问题,降低机组被迫停运次数。
(云南大唐国际勐野江水电开发有限责任公司云南普洱 665000)摘要:针对某电厂1、2号机组技术供水滤水器发生多次堵塞,致使机组频繁被迫停机,进行了认真细致的分析,找到问题的原因,提出了改造方案,有效减少技术供水滤水器堵塞问题,降低机组被迫停运次数。
关键词:滤水器;堵塞;被迫停运 Abstract:For many times the blockage of A power plant 1, No. 2 water supply water filter unit, resulting in frequent downtime, earnestly analyze, find the cause of the problem, put forward the improvement scheme, effectively reduce the problem of blocking technology of water supply water filter, reduce the unit forced outage times. Key Words: water filter;occlusion;Forced outage 1引言勐野江水电厂位于云南省普洱市宁洱县(左岸)与江城县(右岸)的界河勐野江下游河段上,距宝藏镇35km。
勐野江水电厂属径流引水式电厂,装机容量为2×34MW,年发电量3.072亿kW.h。
由于流域水流含沙量大。
根据忠爱桥水文站泥沙资料和龙马水电厂可研设计阶段采用成果,计算的勐野江水库多年平均悬移质入库沙量为145.3万t,推移质沙量按悬移质输沙量的10%计算,则推移质入库沙量为14.5万t,总入库沙量为159.8万t,多年平均含沙量0.89kg/m3,汛期6月~10月沙量占全年的93.7%。
建筑给排水设备智能化控制与监测技术研究一、引言在现代建筑中,给排水系统是至关重要的组成部分,它直接关系到人们的生活质量和建筑物的正常运行。
随着科技的不断进步,智能化控制与监测技术在建筑给排水领域的应用越来越广泛,为提高给排水系统的效率、可靠性和节能性带来了新的机遇。
二、建筑给排水设备智能化控制技术(一)智能传感器技术智能传感器是实现给排水设备智能化控制的基础。
通过在管道、水箱、水泵等部位安装压力传感器、流量传感器、液位传感器等,可以实时监测给排水系统的运行参数。
这些传感器能够将采集到的数据准确、快速地传输给控制系统,为智能化控制提供依据。
(二)自动控制算法基于传感器采集到的数据,采用先进的自动控制算法对给排水设备进行控制。
例如,PID 控制算法可以根据设定值和实际值的偏差,自动调整水泵的转速或阀门的开度,以实现稳定的压力和流量控制。
模糊控制算法则可以处理一些复杂的、不确定的系统特性,提高控制的适应性和鲁棒性。
(三)变频调速技术在水泵控制中,变频调速技术是一项重要的智能化控制手段。
通过改变电机的供电频率,实现水泵转速的无级调节,从而根据实际需求精确控制流量和压力。
与传统的定速运行方式相比,变频调速技术可以显著降低能耗,延长设备使用寿命。
(四)智能控制系统架构一个完善的智能控制系统架构通常包括现场控制层、网络通信层和监控管理层。
现场控制层负责采集数据和执行控制指令;网络通信层实现数据的可靠传输;监控管理层则对整个系统进行集中监控和管理,为用户提供直观的操作界面和数据分析功能。
三、建筑给排水设备智能化监测技术(一)远程监测与诊断利用互联网技术,实现对给排水设备的远程监测。
运维人员可以通过手机、电脑等终端随时随地查看设备的运行状态,及时发现潜在问题。
同时,借助数据分析和诊断技术,对设备故障进行预测和预警,提前采取维护措施,避免故障的发生。
(二)水质监测技术水质监测是保障给排水系统安全运行的重要环节。
智能化的水质监测设备可以实时检测水中的酸碱度、浊度、余氯等指标,并将数据上传至监控系统。
某电站机组技术供水系统滤水器排污阀控制方式比较分析某电站机组技术供水系统滤水器排污阀采用过两种控制方式,来控制排污阀的开启和关闭。
第一种采用全智能化的电位器执行器来控制阀门开、关,采用纯电气线路和控制板;第二种采用凸轮机构和微动开关来控制阀门开、关,采用机械与电气相结合的方式。
本文试比较两种方式控制的优缺点。
标签:电位器;执行器;微动开关;交流接触器;继电器1 某电站机组技术供水系统滤水器排污阀采用电位器控制时的问题某电站技术供水系统滤水器排污阀排污时,由于排污管内压力急速降低,管道内水流速极快且呈紊流,引起排污管发生剧烈振动,造成了排污阀电动装置内执行器电路板、行程控制电位器等设备缺陷频发,影响了设备的正常运行。
从2011年1月至2013年7月,机组技术供水系统滤水器排污阀因振动过大导致的缺陷达32条(见表1),包括排污阀执行器电路板损坏、排污阀过力矩(多是由于行程控制电位器因振动发生了节点偏移或损坏所致)、执行器电路板接线松动等。
其中执行器电路板损坏最为频繁,在统计的时间内就有15条缺陷,损坏后需更换新的电路板,长期而言既不经济也不可靠。
2 电位器执行器控制特点纯电气控制排污阀主要由电路板控制器和电位器执行器两大部分组成。
电位器是具有三个引出端、阻值可按某种变化规律调节的电阻元件。
电位器通常由电阻体和可移动的电刷组成。
当电刷沿电阻体移动时,在输出端即获得与位移量成一定关系的电阻值或电压。
当排污阀现地控制柜内的CPU发出“开”指令时,信号给到排污阀本体内的电路板控制器,控制器控制电位器向开方向转动,到达全开位置反馈给控制器一个全开信号,控制器停止动作。
CPU发“关”指令时亦然。
采用电位器控制时可以在阀门本体控制面板上设置阀门”全开”和“全关”位置,另外,无须调整电机的三相接线,由于控制器是一个智能化的集成电路板,当设定好开关位置后阀门会自动纠错,发出“开”指令时阀门如果朝“关”方向转,几秒后会自动调整转向,使阀门朝“开”方向转。
192研究与探索Research and Exploration ·探讨与创新中国设备工程 2018.02 (下)1 项目研究技术路线(1)主排水系统存在问题的统计分析。
(2)研究主排水系统存在问题的解决方法。
(3)准备项目所需的设备、材料、配件。
(4)对项目进行实施。
(5)总结项目实施情况。
2 项目研究内容和目标2.1 研究内容(1)如何改进开机方式,缩短开机时间。
(2)如何提高排水效率。
2.2 研究目标(1)提高主排水系统的可靠性。
(2)提高主排水系统的排水效率,实现节能效果。
3 项目研究内容3.1 主排水系统概况三矿井主排水系统由1650水泵房、1525水泵房及1400水泵房3个泵房组成。
1525水泵房承担六采区1525及以上水平矿井涌水的排水任务;1650水泵房承担五采区1650以上水平矿井涌水及1400水泵房排上来的矿井水的排水任务;1400水泵房承担五采区、六采区1450水平、1400水平(含1400水平以下临时排水设施排上来的水)及七采区水平矿井涌水的排水任务。
(1)1650水泵房:安装有200D43×6型水泵3台、200D43×8型水泵1台,配用电机功率分别为315kW 电机3台,450kW 电机1台,排水能力为288m 3/h,2趟排水管路通过皮带斜井直通地面排洪沟和净化车间水池,管径为¢300mm;泵房有甲、乙2个水仓,甲仓容积为1960m 3,乙仓容积为2500m 3。
(2)1525水泵房:共安装4台水泵,其中3台水泵为200D43×9型,配用电机功率为450kW,排水能力为288m 3/h,另有1台150D 水泵,配给功率160kW,排水能力为150m 3/h。
200D43×9型水泵将矿井水排至地面排洪沟和净化车间水池,排水管路2趟,管径为¢200mm;150D 型水泵将水排至1700水池和1600水池,用于井下防尘和设备冷却;泵房有甲、乙2个水仓,甲仓容积为1250m 3,乙仓容积为1424m 3。
鲁地拉机组技术供水系统滤水器排污阀控制方式比较研究
发表时间:2018-10-01T10:51:49.573Z 来源:《电力设备》2018年第16期作者:崔茁
[导读] 摘要:滤水器设备的正常工作是保证水电站技术供水系统正常运转的重要基础,而排污阀属于滤水器设备中十分重要的组成部分,其实际工作性能将会影响到滤水器排污性能,进而影响到水电站技术供水系统的可靠性。
(云南华电鲁地拉水电有限公司)
摘要:滤水器设备的正常工作是保证水电站技术供水系统正常运转的重要基础,而排污阀属于滤水器设备中十分重要的组成部分,其实际工作性能将会影响到滤水器排污性能,进而影响到水电站技术供水系统的可靠性。
因此,需要加强滤水器排污阀控制的研究,选出最为科学合理的控制方式。
本文对鲁地拉公司机组技术供水系统滤水器排污阀方式展开探讨,其主要有两种形式:单纯电气控制和机械、电气结合控制,下面对这两种方式做具体的比较分析。
关键词:水电站;供水系统;滤水器;排污阀;控制方式
近年来,我国水污染程度日益加重,在水体中有着越来越多的塑料袋、塑料瓶等杂物,尤其是当夏季来临时,水中的污染物含有量更加的突出,这无疑为水电站的正常运转造成较大的影响,同样也对供水系统滤水器性能提出更高要求,需要其中排污阀控制方式更为精准有效。
一、鲁地拉公司机组技术供水系统滤水器排污阀控制方式概述
鲁地拉公司机组技术供水系统滤水器排污阀控制方式最初都采用的是电气控制方式(电位器控制),但是在实际的运用过程中,受到排污时振动的影响,使得相关控制电气元件出现较多的故障,对水电站机组技术供水系统的正常运行造成较大的影响[1]。
后在对其维修的过程中,对滤水器排污阀控制方式做出适当的调整,将单纯的电气控制方式改变为机械、电气结合控制的方式(凸轮和电气开关),经后期使用故障显示,出现故障的频率明显降低,由此可以看出,机械、电气结合控制的方式应用在振动较大的排污环境之中,具有更高的可靠度。
二、单纯电气控制方式分析
滤水器中单纯的电气控制排污阀主要由两部分组成:电位器和电路板控制器。
其工作原理为:滤水器中CPU在工作过程中发出“打开”指令的时候,首先会将信号传递到电路板控制器上,然后由电路板控制器对电位器进行控制,使电位器之中的可移动电刷移动到“打开”的位置上,当处于全部“打开”状态时,会反馈给电路板控制器一个完成的信号,此时控制器停止工作,排污阀顺利打开[2]。
同样的当滤水器中CPU给出“关闭”指令时,电路板控制器会控制电位器完成关闭操作,让排污阀处于关闭状态。
在整个开关控制过程中,都由智能化的集成电路板进行控制,且有着实时信息反馈功能,能够自动对开关的状态进行纠错,在控制上较为方便。
其优点主要表现为:阀门控制结构相对较为简单,且具有较高的自动化、智能化功能,在体型上相对于机械阀门控制更小,安装操控更为便捷,具有较高的操控精度。
其缺点主要表现为:其中所采用的电位器和电路板控制器都属于十分精密的电子元件,因此对使用的环境要求较高[3]。
而水电站技术供水系统滤水器排污工作时会产生较大的振动,这种振动较容易造成电子元件出现故障,进而影响到其对排污阀的控制,这也是造成鲁地拉公司实际应用中经常出现排污故障的主要原因。
三、机械、电气结合控制方式分析
滤水器中机械、电气结合控制方式主要元件有:继电器、接触器、微动开关以及凸轮。
其工作原理为:排污阀门处于关闭状态下时,其内部的连接控制线路处于接通的状态。
当滤水器中CPU在工作过程中发出“打开”指令的时候,首先继电器开始工作,其中处于常闭的节点断开,处于常开状态的节点闭合,控制排污阀门朝着打开的方向旋转;当阀门旋转到最大开合度的时候,其上连接的凸轮装置会触碰到微动开关,让微动开关反馈回信号给继电器,使得继电器的常开节点断开,此时滤水器排污阀门处于全开的状态[4]。
同样的原理,滤水器中CPU在工作过程中发出“关闭”指令的时候,继电器的常闭节点闭合,控制阀门朝着关闭方向旋转,直到达到全部关闭的位置为止。
该种控制方式的优点主要表现为:更适用于一些较为复杂特殊的环境之中,如振动较大的环境,其中凸轮和微动开关都有着较高的稳定性,使得在对排污阀的操控上更加稳定可靠,这也是鲁地拉公司换用这种排污阀控制方式之后,故障发生率明显降低的主要原因,是纯电气控制不具有的优势所在。
该种控制方式的缺点主要表现为:在操控的智能性和自动化程度上相较于电气控制较低,在最初的控制过程中,需要手动调节阀门和凸轮转动的位置,并在相应位置处安置微动开关,以实现“全开”和“全闭”[5]。
而且在设置中如果出现转向错误的问题,需要改变电机的相来进行调节,其初始操作极为麻烦。
四、结语
综上所述,在水电站机组技术供水系统滤水器排污过程中,存在着较大的振动性,这对于单纯的电气控制方式十分不利,较容易引起电子元件的损坏,增大水电站运行过程中的维修成本。
因此,在滤水器排污控制中应当主要采用机械、电气联合控制的方式,虽然在初期操作较为复杂,但是能够有效保证后期长时间的运行稳定,具有更高的性价比,而且有助于水电站供水系统运行的稳定可靠。
参考文献:
[1]王兴芳.某电站机组技术供水系统滤水器排污阀控制方式比较分析[J].山东工业技术,2016(02):31.
[2]于治磊,李坚.浅谈漫湾电厂500kV主变滤水器控制系统改造[J].水电厂自动化,2015,36(03):24-27.
[3]张宏亮,祁小丽.龙滩水电站技术供水滤水器结构分析和改造探讨[J].红水河,2009,28(03):77-79+82.
[4]李忠明.自动化元件在白山二期机组技术供水系统的成功应用[J].水电厂自动化,2008,29(04):32-35.
[5]陈建光.引黄工程泵站技术供水滤水器排污控制技术改造[J].科技情报开发与经济,2006(18):288-289.。