PLC三节传送带的模拟控制
- 格式:doc
- 大小:85.50 KB
- 文档页数:7
基于PLC的传送带控制系统设计概述传送带是工业生产中常见的运输设备,用于将物料从一个地方转移到另一个地方。
为了实现传送带的安全高效运行,需要设计一个可靠的控制系统。
本文将介绍基于PLC(可编程逻辑控制器)的传送带控制系统设计,包括硬件选型、软件设计和控制逻辑。
硬件设计PLC选型选择适合的PLC对于控制系统的设计至关重要。
在选择PLC时,需要考虑以下因素:•输入输出点数:根据传送带的需要确定所需的输入输出点数,包括传感器、执行元件等。
•处理能力:PLC的处理能力需要满足传送带控制的要求,包括响应速度、运算能力等。
•扩展性:如果未来有扩展需求,需要选择具有扩展接口的PLC。
传感器和执行元件为了实现对传送带的有效控制,需要选择适合的传感器和执行元件:•光电传感器:用于检测物料的到达和离开,可以通过监测物料的光电信号来确定物料的位置和运行状态。
•编码器:用于监测传送带的位置和速度,可以实时反馈传送带的状态。
•电动机:用于驱动传送带的运行,可以根据控制信号调整传送带的速度和方向。
软件设计编程语言选择PLC通常支持多种编程语言,包括Ladder Diagram(梯形图)、Structured Text(结构化文本)等。
根据实际需要选择合适的编程语言,以实现控制逻辑。
控制逻辑设计传送带的控制逻辑包括以下几个方面:•启动和停止控制:根据输入信号判断传送带是否需要启动或停止,同时控制电动机的开启和关闭。
•速度和方向控制:根据设置的速度和方向信号,调整电动机的转速和传送带的运行方向。
•故障检测和保护:监测传感器和执行元件的状态,及时发现故障并采取保护措施,例如停止传送带或报警。
控制系统实现硬件连接根据PLC和传感器、执行元件的接口要求,进行硬件连接。
确保输入信号和输出信号正确连接到PLC的相应接口。
软件编程根据控制逻辑设计,使用选择的编程语言编写PLC程序。
在编程过程中,需要充分考虑系统的实时性和稳定性,确保程序的可靠性。
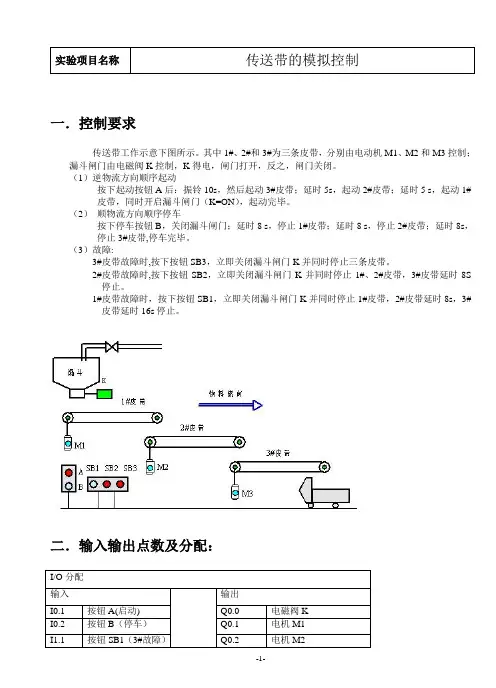
实验项目名称传送带的模拟控制一.控制要求传送带工作示意下图所示。
其中1#、2#和3#为三条皮带,分别由电动机M1、M2和M3控制;漏斗闸门由电磁阀K控制,K得电,闸门打开,反之,闸门关闭。
(1)逆物流方向顺序起动按下起动按钮A后:振铃10s,然后起动3#皮带;延时5s,起动2#皮带;延时5 s,起动1#皮带,同时开启漏斗闸门(K=ON),起动完毕。
(2)顺物流方向顺序停车按下停车按钮B,关闭漏斗闸门;延时8 s,停止1#皮带;延时8 s,停止2#皮带;延时8s,停止3#皮带,停车完毕。
(3)故障:3#皮带故障时,按下按钮SB3,立即关闭漏斗闸门K并同时停止三条皮带。
2#皮带故障时,按下按钮SB2,立即关闭漏斗闸门K并同时停止1#、2#皮带,3#皮带延时8S停止。
1#皮带故障时,按下按钮SB1,立即关闭漏斗闸门K并同时停止1#皮带,2#皮带延时8s,3#皮带延时16s停止。
二.输入输出点数及分配:I/O分配输入输出I0.1 按钮A(启动) Q0.0 电磁阀KI0.2 按钮B(停车)Q0.1 电机M1I1.1 按钮SB1(3#故障)Q0.2 电机M2I1.2 按钮SB2(2#故障)Q0.3 电机M3I1.3 按钮SB3(1#故障)Y 蜂鸣器M0.0、M0.1、M0.2、M0.3中间继电器三.指令语句①LD I0.1ONI YOUT YTON T34,100②LDI M0.3ANI T42ANI T41ANI T39AI T34OUT Q0.3TON T35,50③LDI M0.3ANI M0.2ANI T40ANI T38AI T35OUT Q0.2TON T36,50④LDI M0.3ANI M0.2ANI M0.1ANI T37AI T36LDI M0.0OUT Q0.0OUT Q0.1OLD⑤LD I0.2ON M0.0OUT M0.0TON T37,80TON T38,160TON T39,240 ⑥LD I1.1ON M0.1 OUT M0.1 TON T40,80 TON T41,160 ⑦LD I1.2ON M0.2 OUT M0.2 TON T42,80 ⑧LD I1.3ON M0.3 OUT M0.3四.梯形图五.实验分析及总结经过这次实验,使我巩固了课堂上学习的内容,对如何使用PLC解决实际生产问题有了基本了解。

三段传送带plc控制实训报告心得体会一个星期的plc实训结束了,在这短暂的一周实训时间里,经过老师同学的指导,我获益匪浅,学习了不少关于自己专业方面的知识。
在此实习中充分了解plc操作程序,我们自己也会学着去做一点点,不能说反正遇到问题还是的找老师来解决,我们要学着自己独立完成,完成每一个实训项目,其次我们必须要通过实训与理论相结合,这样才能事半功倍。
我们组进行了任务的分工,这样,一下子问题就变得简单化了。
自己选择了画图,在老师的指导下,自己慢慢开始学会了如何用相应的软件去画图,感觉自己画的不错,就慢慢的熟练起来。
这次实训给予我们的时间是一个星期,有一个实训项目,老师给我们说明了一些问题的所在,但我们大家基本上是在一个星期里这个项目调试完成了。
通过这次的实训,让我受益匪浅。
首先,认识了团队合作的力量,要完成一个项目不是一个人的事情,当中我们有过分歧但最终达成共识,不管结果怎样,至少我们曾经在一起努力过,体验其中的过程才是真正的收获。
其次,通过这次的实践操作,我认识到了自己的不足,更感觉到了自己与别人的差距。
为了明年的毕业而做准备,从各方面充实自己,使自己适应这个社会。
本次实习主要任务是设计交通灯的功能,以及在遇见问题时的急停,通过理论与实践相结合,进一步加深我们的理论知识。
要想在短暂的实训时间内,尽可能能多的学一些东西,这就需要我们跟老师有很好的沟通,加深彼此的了解。
刚到实习教室,老师并不了解我们的工作和学习能力,不清楚我们会做哪些工作,所以跟老师进行沟通是很必要的。
通过沟通了解才能知道自己的不足,在短暂的实习过程中,让我深深的感觉到自己在实际运用中的专业知识的匮乏。
同时,让我们真正领悟到学无止境的.含义。
总之,这次的实训给予了我不同的学习方法和体验,让我深切的认识到实践的重要性。
在以后的学习过程中,我会更加注重自己的操作能力和应变能力,多与这个社会进行接触,让自己更早适应这个陌生的环境,。
这次虽然辛苦了点,但能让我学到不同的东西,我心里还是高兴的。
2011-2012 学年下学期变频器技术及PLC实训报告系部:机械工程系专业班级:姓名:学号:指导教师:完成日期:目录实训一运输带控制 (3)1.1 实训目的 (3)1.2 实训内容和控制要求 (3)1.2.1 两条运输带的控制 (3)1.2.2 三条运输带的控制 (4)1.3 I/O分配表 (5)1.4 I/O接线图 (6)1.5功能图 (7)1.6 梯形图 (8)1.7 波形图 (9)1.8 指令语句表 (10)实训二异步电动机自耦减压起动控制 (12)2.1实验目的 (12)2.2实验内容和控制要求 (12)2.3 I/O分配表 (13)2.4 I/O接线图 (13)2.5 功能图 (14)2.6 梯形图 (14)2.7 波形图 (15)2.8 指令语句表 (15)实训三剪板机 (16)3.1实训目的 (16)3.2实训内容 (16)3.3波形图 (17)3.4.I/O分布表 (17)3.5I/O接线图 (18)3.6功能顺序图 (18)3.7梯形图 (19)实训总结 (20)参考文献 (21)致谢 (22)实训一运输带控制1.1 实训目的熟悉S7-200系列PLC的指令,用经验设计法编写简单的梯形图程序。
1.2 实训内容和控制要求两条运输带循序相连(见图1-1)为了避免运送的物料在1号运输带上堆积,按下起动按钮I0 .0,1号运输带开始运行,5s后2号运输带自动起动。
停机的顺序与起动的顺序刚好相反,即按了停止按钮I0.1后,先停2号运输带,5s后停1号运输带。
PLC通过交流接触器KM1和KM2控制两台电动机M1和M2。
图1-3是PLC的外部接线图,SB1和SB2分别是起动按钮和停止按钮。
梯形图程序如图1-7所示,图1-9是程序中各变量的波形图。
将程序下载到PLC后运行程序。
用接在输入端子I0.0的小开关发出起动信号,观察Q0.0是否变为1状态,5s后Q0.1是否能自动变为1状态。
用接在输入端子I0.1的小开关发出停止信号,观察Q0.1是否马上变为0状态,5s后Q0.0是否自动变为0状态。
传送带PLC控制系统设计一、本文概述Overview of this article随着工业自动化水平的不断提升,传送带作为物流和生产流程中的关键环节,其控制系统设计变得愈发重要。
本文将深入探讨《传送带PLC控制系统设计》的相关内容,旨在为读者提供一套全面、高效的传送带控制系统设计方案。
文章将首先介绍传送带PLC控制系统的基本概念、发展历程以及其在工业自动化领域的应用价值。
随后,文章将详细阐述PLC控制系统的硬件组成、软件编程以及系统调试等关键环节,并结合实际案例进行分析。
文章还将探讨传送带PLC控制系统设计中的常见问题及解决方案,为读者在实际应用中提供有益参考。
通过本文的阅读,读者将能够深入了解传送带PLC控制系统的设计原理和实践方法,为工业自动化领域的发展贡献力量。
With the continuous improvement of industrial automation level, the control system design of conveyor belts, as a key link in logistics and production processes, has become increasingly important. This article will delve into the relevant content of "Design of PLC Control System for ConveyorBelt", aiming to provide readers with a comprehensive and efficient design scheme for conveyor belt control system. The article will first introduce the basic concept, development history, and application value of PLC control system for conveyor belts in the field of industrial automation. Subsequently, the article will elaborate in detail on the hardware composition, software programming, and system debugging of the PLC control system, and analyze them in conjunction with practical cases. The article will also explore common problems and solutions in the design of PLC control systems for conveyor belts, providing useful references for readers in practical applications. Through reading this article, readers will be able to gain a deeper understanding of the design principles and practical methods of PLC control systems for conveyor belts, contributing to the development of industrial automation.二、传送带基础知识Fundamentals of conveyor belts传送带作为工业生产和物流运输中的关键设备,广泛应用于各个行业。
分布式控制课程设计设计题目:课题十——三段传送带的启动和停止控制学校:院系:设计人员:指导教师:基于PLC、触摸屏的三级传送带顺序控制系统1。
课题背景随着科技技术的发展,现在设备都有全自动生产功能。
工人只要按下开始按钮就可以让传送带自己运转,在下班时按下停止按钮就可以停止了.为了能使传送带的起动和停止实现自动化,我们在设计中采用了顺序起动的操作。
电路有自己判断故障的的能力,为我们的生产带来了方便。
PLC集三电(电控、电仪、电传)为一体、性能价格比高、高可靠性的特点,已成为自动化工程的核心设备。
PLC成为具备计算机功能的一种通用工业控制装置,其使用量高居首位.就全世界自动化市场的过去、现在和可以预见的未来而言,PLC仍然处于一种核心地位。
在最近出现在美国、欧洲和国内有关探讨PLC发展的论文中,这个结论是众口一词的,尽管对PLC的未来发展有着许多不同的意见。
在全球经济不景气的时候,PLC的市场销售仍然坚挺;PC控制有了引人注目的进展,但毕竟只能对高端的PLC产品形成竞争;小型、超小型PLC的发展势头令人刮目相看;PLC和PC控制在今后可能相互融合。
在传统设备改造和新设备设计中,PLC的应用逐年增多,取得良好效果。
PLC在我国的应用越来越广泛。
2.系统构成三级传送带顺序控制系统如图1所示,由控制面板、触摸屏、PLC、隔板、交流接触器及热继电器、传送带驱动电机等构成.控制面板包括电路总启动、停止按钮;触摸屏用来提供友好的人机界面,能够完成控制面板功能。
PLCS7-300(CPU314)是系统的控制核心;隔离板的作用是保护PLC,先由PLC驱动小型继电器,再驱动交流接触器;热继电器起过流保护作用。
图1 三级传送带顺序控制系统3.系统功能及任务分析图2 传送带控制系统结构示意图控制要求:① 按下启动按钮,电动机M1运行,当行程开关SQ1检测到工件到来时,自动启动电动机M2运行。
②当行程开关SQ2检测到工件离开时,自动停止电动机M1运行。
可编程控制器PLC系统设计设计题目:三节传送带的模拟专业电子信息科学与技术班级电信092学号************学生姓名邵苗苗设计时间2011-2012学年上学期教师评分2011年10 月20一、控制要求:1.启动时先起动最末一条皮带机,经过5秒延时,再依次起动其它皮带机。
2. 停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
3. 当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完为止。
例如M2故障,M1、M2立即停,经过5秒延时后,M3停。
二、输入输出点数及分配:输入输出设备输入点设备输出点启动按钮SB1 I0.1 A皮带机M1 Q0.1停止按钮SB2 I0.5 B皮带机M2 Q0.2A故障SQ1 I0.2 C皮带机M3 Q0.3B故障SQ2 I0.3C故障SQ3 I0.4三、指令语句:Network 1 Network 4LD I0.1 LD I0.5O M0.1 O M0.3AN I0.5 AN I0.1AN I0.2 R Q0.1AN I0.3 = M0.3AN I0.4S Q0.3 Network 5= M0.1 LD M0.3S_ODT T39,S5T#5S Network 2 R Q0.2LD M0.1 = M0.4S_ODT T37,S5T#5SS Q0.2 Network 6= M0.2 LD M0.4S_ODT T40,S5T#5S Network 3 R Q0.3LD M0.2S_ODT T38,S5T#5SS Q0.1Network 7 Network 10LD I0.2 LD I0.3O M0.5 O M0.7AN I0.1 AN I0.1R Q0.1 R Q0.1= M0.5 R Q0.2= M0.7 Network 8 Network 11LD M0.5 LD M0.7S_ODT T41,S5T#5S S_ODT T43,S5T#5S R Q0.2 R Q0.3= M0.6 Network 12LD I0.4 Network 9 O M1.0LD M0.6 AN I0.1S_ODT T42,S5T#5S R Q0.1R Q0.3 R Q0.2R Q0.3= M1.0四、梯形图:五、设计总结与体会通过本次课程设计,不但加深了课堂中所学的PLC及其相关学科知识,而且掌握了更多做实际工程的经验,为以后的工程项目设计做了一个小小的铺垫。
综合设计实验报告2011—2012学年第 2 学期题目 1用变频器和PLC来对电机的控制题目 2用PLC实现三节传送带的操作题目 3用SMART 700触摸屏实现对三节传送带控制系统的操作院(系、部)电气与控制工程学院专业及班级自动化姓名学号完成日期: 2012 年 3 月 2 日目录综合设计实验任务书----------------------------------------- 绪论----------------------------------------------------综合设计实验内容--------------------------------------- 一.设计要求---------------------------------------------二. 设计任务和目的--------------------------------------三. 课题要求--------------------------------------------四. 控制要求---------------------------------------------五. 总体设计方案------------------------------------------ 六.硬件部分设计----------------------------------------- 七.软件部分设计------------------------------------------ 八.调试过程和结果---------------------------------------- 九.心得体会------------------------------------------------- 参考文献------------------------------------------------变频器与PLC综合设计实验任务书西门子(SIEMENS)公司生产的可编程序控制器在我国的应用也相当广泛,在冶金、化工、印刷生产线等领域都有应用。
西门子PLC控制三级传动带顺序启停
例程描述:现有一套三级传送带,用于实现货物的传输,每一级输送带由一台交流电动机控制,电机为M1,M2,M3,分别由KM1,KM2,KM3,KM4,KM5,KM6控制电机的正反转运行。
控制逻辑描述:
a.当装置上电时,系统进行复位,所有电动机停止运行。
b.当手动/自动转换开关SB0闭合时,系统进入自动状态。
按下系统启动按钮SB1时,电动机M3首先正转启动,运转10s以后,电动机M2正转启动,当电动机M2运转10s以后,电动机M1正转启动,此时系统完成启动过程,进入正常运转状态。
c.当按下系统停止按钮SB2时,电动机M1首先停止,当电动机M1停止5S以后,电动机M2停止,当电动机M2停止5s以后,电动机M3停止。
系统在启动过程中按下停止按钮SB2,电动机按启动的顺序反向停止运行。
d.当手动/自动转换开关SB0断开时,系统只能手动模式控制电动机的运行。
通过手动按钮(SB3-SB8),操作员能分别控制三台电动机的正反转运行,实现货物的手动控制传输。
其中SB3,SB4控制M1,SB5,SB6控制M2,SB7,SB8控制M3。
1.主程序
2.自动模式程序
3.手动模式程序。
PLC技术应用实训指导书
班级:
学号:
姓名:
指导老师:
传送带的PLC控制
一、课程设计的控制要求
在工厂自动化领域中,传送带是经常要用到的。
如图所示为一输送工件的传送带,其动作过程如下:
1、按下启动按钮(X0),电动机1、2(Y0、Y2)运转,驱动输送带1、2移动。
按下停止按钮(X5),输送带停止。
2、当工件到达转运点A,SQ1(X1)使输送带1停止,气缸1动作(Y1有输出),将工件送上输送带2。
汽缸采用自动归位型。
当SQ2(X2)检测汽缸1到达定点位置时,汽缸1复位(Y1无输出)。
3、当工件到达转运点B,SQ3(X3)使输送带2停止,气缸2动作(Y3有输出),将工件送上搬运车。
当SQ4(X4)检测气缸2到达定点位置时,气缸2复位(Y3无输出)。
图 3.3.5.1 传输带控制示意图
PLC 接线图
二、设计任务和要求
1.根据本课题要求,用PLC实现对该输送带的控制,并画出电气接口图。
2.调试程序,模拟运行。
三、设计方案提示
I/O地址
2.方案提示
①可用基本指令组成实现控制。
②运用步进顺序指令实现控制。
PLC接线图
四、课题要求:
1、按提议要求,画出主电路、控制电路图、PLC端子接线图极其控制梯形图。
2、完成PLC端子接线工作,并利用编程器输入梯形图控制程序,完成提示。
3、完成课程设计说明书。
梯形图
指令表
调试。
基于PLC的传送带模拟控制系统设计(一)摘要:目前,输送带控制系统在工业领域有着广泛的应用。
PLC系统因其可靠性高、编程简单、功能完善而越来越受到青睐,传统的接触继电器控制系统已逐步被PLC系统所取代。
应用PLC技术实现其自动控制有助于我国的传送带输送机在质量发面、适应性发面、可靠性方面以及工作效率方面缩小我们与国外的差距,实现传送自动化,提高工业装备水平。
本课程设计是用PLC控制四节传送带的工作,主要能够实现思路传送带的顺次启动和停止以及紧急故障处理等功能。
关键字:可编程控制器、传送带模拟控制系统、组态王0.前言可编程序控制器(PLC)是以微处理器为基础,综合了计算机技术、自动控制技术和通信技术发展起来的一种通用的工业自动控制装置。
它具有体积小、功能强、灵活通用与维护方便等一系列的优点。
特别是它的高可靠性和较强的适应恶劣环境的能力,受到用户的青睐。
例如,火电厂的燃料煤是通过煤场的输送带送进锅炉的。
由于煤粉污染大,作业环境恶劣,因此,需要对输送带实现自动控制。
此外,输送带控制系统也广泛运用于井下采矿和食品业等。
对于输送带实现自动控制以及其运行的可靠性与稳定性直接影响着生产发展。
采用传统的接触继电器控制系统,不仅接线复杂、抗干扰能力差,易因接触不良而造成故障,而且功能扩展性差。
因此在冶金、化工、交通、电力等领域获得了广泛的应用,成为了现代工业控制的三大支柱之一。
可编程序控制器是一种存储器控制器,支持控制系统工作的程序存放在存储器中利用程序来实现逻辑控制,完成控制任务。
在可编程控制器构成的控制系统中,要实现一个控制任务,首先要针对具体的被控对象,分析它对控制系统的要求,然后编制出相应的控制程序,利用编程器将控制程序写入可编程控制器的程序存储器中。
系统运行时,可编程控制器依次读取程序存储器中的程序语句,对它们的内容加以解释并执行。
根据输入设备的状态和其他条件,可编程控制器将其程序执行结果输出给相应的输出设备,控制被控对象工作。
PLC技术应用实训指导书
班级:
学号:
姓名:
指导老师:
传送带的PLC控制
一、课程设计的控制要求
在工厂自动化领域中,传送带是经常要用到的。
如图所示为一输送工件的传送带,其动作过程如下:
1、按下启动按钮(X0),电动机1、2(Y0、Y2)运转,驱动输送带1、2移动。
按下停止按钮(X5),输送带停止。
2、当工件到达转运点A,SQ1(X1)使输送带1停止,气缸1动作(Y1有输出),将工件送上输送带2。
汽缸采用自动归位型。
当SQ2(X2)检测汽缸1到达定点位置时,汽缸1复位(Y1无输出)。
3、当工件到达转运点B,SQ3(X3)使输送带2停止,气缸2动作(Y3有输出),将工件送上搬运车。
当SQ4(X4)检测气缸2到达定点位置时,气缸2复位(Y3无输出)。
图 3.3.5.1 传输带控制示意图
PLC 接线图
二、设计任务和要求
1.根据本课题要求,用PLC实现对该输送带的控制,并画出电气接口图。
2.调试程序,模拟运行。
三、设计方案提示
I/O地址
2.方案提示
①可用基本指令组成实现控制。
②运用步进顺序指令实现控制。
PLC接线图
四、课题要求:
1、按提议要求,画出主电路、控制电路图、PLC端子接线图极其控制梯形图。
2、完成PLC端子接线工作,并利用编程器输入梯形图控制程序,完成提示。
3、完成课程设计说明书。
梯形图
指令表
调试。
三层传送带PLC控制系统设计
系统控制要求:
(1)单动与循环控制连锁,任何一个单动按钮“ON”,循环控制不能建立,反之,如果循环控制已建立,单动按钮的动作对循环操作没有任何影响。
(2)当“手动/循环”旋转按钮置“手动”位置时,方可对单机进行单动。
(3)如当2#皮带出现故障时,1#皮带必须紧停,3#皮带可以保持运行,当故障解除,复位,按“启动”按钮,2#机可直接起动,当2#机起动完毕,再延时起动3、4#机。
(4)对于短路等,故障解除,按“复位”按钮,故障锁存复位,未循环起动按钮/旋转单动按钮,皮带不会自行起动。
(5)循环控制时,如果某台皮带起动失败,则其上游设备不能启动,下游设备可保持运行状态。
(6)设声、光报警。
光报警闪烁。
(7)不论循环控制还是单动控制,集中控制紧停按钮均起作用。
由系统控制要求,可有如下工作原理示意图:
物
料
PLC控制系统程序设计:(1)根据控制要求,有输入和输出表::
(2)由控制要求,可有PLC接线图:
(3)由控制设计的要求,可有外部电机接线图:
有上设计,可有传送带的PLC控制系统接线图:。
可编程控制器PLC系统设计设计题目:三节传送带的模拟
专业电子信息科学与技术
班级电信092
学号************
学生姓名邵苗苗
设计时间2011-2012学年上学期
教师评分
2011年10 月20
一、控制要求:
1.启动时先起动最末一条皮带机,经过5秒延时,再依次起动其它皮带机。
2. 停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带
机。
3. 当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮
带机以后的皮带机待运完为止。
例如M2故障,M1、M2立即停,经过5秒延时后,M3停。
二、输入输出点数及分配:
输入输出
设备输入点设备输出点启动按钮SB1 I0.1 A皮带机M1 Q0.1
停止按钮SB2 I0.5 B皮带机M2 Q0.2
A故障SQ1 I0.2 C皮带机M3 Q0.3
B故障SQ2 I0.3
C故障SQ3 I0.4
三、指令语句:
Network 1 Network 4
LD I0.1 LD I0.5
O M0.1 O M0.3
AN I0.5 AN I0.1
AN I0.2 R Q0.1
AN I0.3 = M0.3
AN I0.4
S Q0.3 Network 5
= M0.1 LD M0.3
S_ODT T39,S5T#5S Network 2 R Q0.2
LD M0.1 = M0.4
S_ODT T37,S5T#5S
S Q0.2 Network 6
= M0.2 LD M0.4
S_ODT T40,S5T#5S Network 3 R Q0.3
LD M0.2
S_ODT T38,S5T#5S
S Q0.1
Network 7 Network 10
LD I0.2 LD I0.3
O M0.5 O M0.7
AN I0.1 AN I0.1
R Q0.1 R Q0.1
= M0.5 R Q0.2
= M0.7 Network 8 Network 11
LD M0.5 LD M0.7
S_ODT T41,S5T#5S S_ODT T43,S5T#5S R Q0.2 R Q0.3
= M0.6 Network 12
LD I0.4 Network 9 O M1.0
LD M0.6 AN I0.1
S_ODT T42,S5T#5S R Q0.1
R Q0.3 R Q0.2
R Q0.3
= M1.0
四、梯形图:
五、设计总结与体会
通过本次课程设计,不但加深了课堂中所学的PLC及其相关学科知识,而且掌握了更多做实际工程的经验,为以后的工程项目设计做了一个小小的铺垫。
首先,通过查看S7-300资料的过程中,了解了更多PLC控制系统设计的相关知识。
其次,在对传送带控制系统进行设计及PLC编程时,熟悉并掌握了一个典型PLC控制系统设计的全过程及详细步骤。
最后,在编程中遇到了诸多困难,比如编出的程序多次无法实现控制要求,软件无法安装,画图工具不熟悉等等,但这些都通过同学或老师的帮助得到了解决。
在解决问题的过程中,加强了处理问题时的耐心,小小了解了做设计的艰辛,积累了少量的设计经验。
在编程的过程中,通过不断的修改程序以达到设计要求,更深的体会到了设计的严谨性。
同时也拓展了视野,看到了PLC作为现代自动化工业三大技术支柱之一的发展前景,并且明白了要做好一个设计需要储备丰富的专业知识,总而言之,获益匪浅。