永磁同步电机的模型和方法
- 格式:pptx
- 大小:811.22 KB
- 文档页数:23
一、概述如今,在工业界中,三相永磁同步电机因其结构简单、运行稳定、效率高等特点成为了一种常见的电机类型。
而电机的控制则是保证电机能够稳定高效运行的关键。
掌握三相永磁同步电机的控制原理对于工程师来说至关重要。
在三相永磁同步电机的控制中,坐标变换技术是一种常用的数学方法,通过坐标变换可以将三相电机的控制问题转换为直流电机控制问题,从而简化了控制器的设计。
二、三相永磁同步电机的数学模型1. 三相永磁同步电机是一种特殊的同步电机,它的定子绕组被连接到一个三相交流电源上。
它的转子上装有永磁体,因此在没有机械负载情况下依然能够产生恒定的磁场,这使得电机具有较高的效率和响应速度。
2. 为了完成对三相永磁同步电机的控制,我们需要建立其数学模型。
假设电机有a、b、c三个定子绕组,每个绕组的电流分别为ia、ib、ic,电机的磁链为Ψ,电机的控制变量为u,那么电机的数学模型可以表示为:其中,Ld和Lq分别表示d轴和q轴上的电感,ψp是永磁体的磁通,M是电机的磁链,J是电机的转动惯量,B是电机的阻尼系数,Te为电机的电磁转矩。
三、坐标变换推导1. 在三相永磁同步电机的控制中,我们通常使用dq坐标系来描述电机的运动状态。
在dq坐标系中,d轴与永磁体的磁通方向一致,q轴与d轴垂直。
通过dq坐标变换可以将三相电机的控制问题转换为直流电机的控制问题。
2. 我们可以通过以下的数学推导来实现坐标变换:在直角坐标系下,电机的三相电流可以表示为:假设θ为电机的旋转角度,那么dq坐标系转换可以表示为:在dq轴上,电机的电流可以表示为:通过以上推导,我们可以得到电机在dq坐标系下的控制方程,从而可以实现对电机的控制。
四、结论通过以上的推导,我们可以看到坐标变换技三相永磁同步电机坐标变换推导是电机控制中的关键步骤。
坐标变换可以让我们更方便地对电机进行控制,简化了控制器的设计流程,并且使得控制更加高效和稳定。
在坐标变换的基础上,我们可以进一步推导出电机的控制方程,从而实现对电机的精确控制。
永磁同步电机的数学模型及矢量控制原理WAA磁同步电机的转F上水盛体的安装方式的不同,则电机的制造丄适用场所、运行•性能、控制方法也郁有所五同。
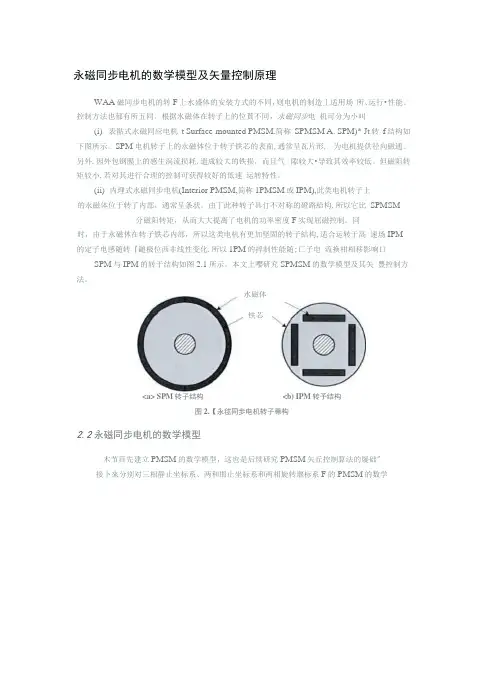
根据氷磁体在转子上的位貰不同,永磁同步电机可分为小叫(i)表骷式永磁同应电机t Surface-mounted PMSM.简称SPMSM A. SPM)* Jt转f结构如下图所示。
SPM电机转子上的永磁体位于转子铁芯的表面,通常呈瓦片形, 为电机提供径向磁通。
另外,因外包钢膜上的感生涡流损耗,遣成较大的铁损,而且气隙较大•导致其效率较低。
但磁阻转矩较小.若对其进行合理的控制可获得较好的低速运转特性。
(ii)内埋式永磁同步电机(Interior PMSM,简称1PMSM或IPM),此类电机转子上的永磁体位于转了内部,通常呈条状。
由丁此种转子具仃不对称的磴路給构,所以它比SPMSM 分磁阳转矩,从而大大提离了电机的功率密度F实现屈磁控制。
同时,由于永磁休在转子铁芯内部,所以这类电机有更加坚固的转子結构,适合运转于高速场IPM 的定子电感随转『鎚极位西非线性变化.所以1PM的捽制性能随;匸子电流换柑相移影响口SPM与IPM的转于结构如图2.1所示。
本文上嘤研究SPMSM的数学模型及其矢豐控制方法。
水磁体铁芯<a> SPM转子结构<b) IPM转予结构图2.【永毬同歩电机转子蒂构2.2永磁同步电机的数学模型木节苜先建立PMSM的数学模型,这也是后续研究PMSM矢丘控制算法的屣础"接卜來分别对三相静止坐标系、两和邯止坐标系和两相旋转堰标系F的PMSM 的数学模型进行描述。
严格的说,永磁同步电机是一个存在非线性磁化特性和饱和效应的电磁装留,它的 动态方程式一个高阶微分方程,很难对它进行粘确求解,所以必须对它进行一定程度的 简化,将它化成一个二阶微分方程组。
为了突出主婆何题,先忽略次要因素,作如下假 设叫(1) 忽略谐波效应,设定子三相绕组完全对称且在空间中互差120°电角度,所 产生理想正弦磁动势;(2) 忽略永磁体的非线件饱和因素,认为各相绕纽的阴值、电感都是恒定的,FI Ro = R 、= R< = &丄(! = — = Lc ;(3) 不计电机的磁滞损耗和涡流损耗等: (4) 不考电频率和温度变化对电机参数的场响: (5) 转子上没有阻尼绕组,永磁体没有阻尼作用。

永磁同步电动机矢量控制模型的设计与仿真交流调速理论包括矢量控制和直接转矩控制。
1971年,由F.Blaschke 提出的矢量控制理论第一次使交流电机控制理论获得了质的飞跃。
矢量控制采用了矢量变换的方法,通过把交流电机的磁通与转矩的控制解耦使交流电机的控制类似于直流电动机。
矢量控制方法在实现过程中需要复杂的坐标变换,而且对电机的参数依赖性较大。
直接转矩控制是1985年Depenbrock教授在研究异步电机控制方法时提出的。
该方法是在定子坐标系下分析交流电机的数学模型,强调对电机的转矩进行直接控制,对转矩进行砰一砰控制,无需解耦,省掉了矢量旋转变换计算。
控制定子磁链而不是转子磁链,不受转子参数变化的影响,但不可避免地产生转矩脉动,低速性能较差,调速范围受到限制。
而且由于它对实时性要求高、计算量大,对控制系统微处理器的性能要求也较高。
矢量控制的基本思想是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使得两个分量互相垂直,彼此独立,然后分别进行调节。
这样交流电动机的转矩控制,从原理和特性上就和直流电动机相似了。
控制策略的选择上是PID控制,传统的数字PID控制是一种技术成熟、应用最为广泛的控制算法,其结构简单,调节方便。
1 永磁同步电机的数学模型1.1 永磁同步电机系统的结构永磁同步电机的基本组成:定子绕组、转子、机体。
定子绕组通过三相交流电,产生与电源频率同步的旋转磁场。
转子是用永磁材料做成的永磁体,它在定子绕组产生的旋转磁场的作用下,开始旋转。
1.2 坐标变换坐标变换,从数学角度看,就是将方程中原来的一组变量,用一组新的变量来代替。
线性变换是指这种新旧变量之间存在线性关系。
电动机中用到的坐标变换都是线性变换。
在永磁同步电机中存在两种坐标系,一种是固定在定子上的它相对我们是静止的,即:α,β 坐标系,它的方向和定子三相绕组的位置相对固定,它的方向定位于定子绕组 A 相的产生磁势的方向,另一种是固定在转子上的旋转坐标系,我们通常称之为 d,q 坐标,其中 d 轴跟单磁极的 N 极方向相同,即和磁力线的方向相同,q 轴超前 d 轴 90 度下图所示。
永磁同步发电机的结构直驱式永磁发电机在结构上主要有轴向与盘式两种结构,轴向结构又分为内转子、外转子等;盘式结构又分为中间转子、中间定子、多盘式等;另外还有双凸极发电机与开关磁阻发电机。
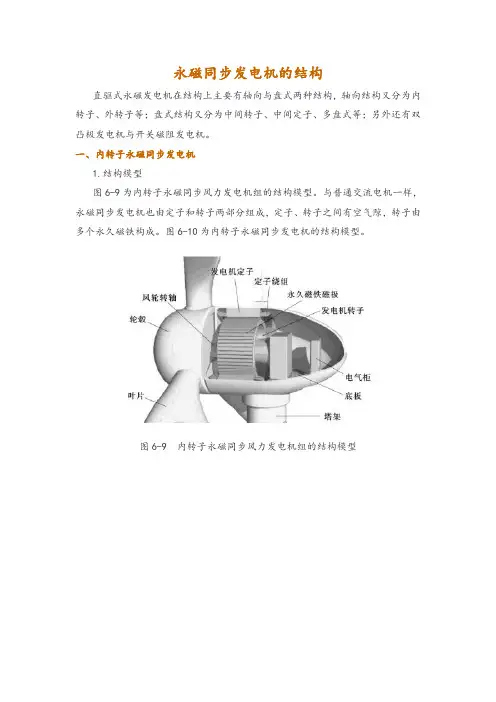
一、内转子永磁同步发电机1.结构模型图6-9为内转子永磁同步风力发电机组的结构模型。
与普通交流电机一样,永磁同步发电机也由定子和转子两部分组成,定子、转子之间有空气隙,转子由多个永久磁铁构成。
图6-10为内转子永磁同步发电机的结构模型。
图6-9 内转子永磁同步风力发电机组的结构模型图6-10 内转子永磁同步发电机的结构模型2.定子结构永磁同步发电机的定子铁芯通常由0.5mm厚的硅钢片制成以减小铁耗,上面冲有均匀分布的槽,槽内放置三相对称绕组。
定子槽形通常采用与永磁同步电动机相同的半闭口槽,如图6-11所示。
为有效削弱齿谐波电动势和齿槽转矩,通常采用定子斜槽。
定子绕组通常由圆铜线绕制而成,为减少输出电压中的谐波含量,大多采用双层短距和星形接法,小功率电机中也有采用单层绕组的,特殊场合也采用正弦绕组。
3.转子结构由于永磁同步发电机不需要起动绕组,转子结构比异步启动永磁同步电动机简单,有较充足的空间放置永磁体。
转子通常由转子铁芯和永磁体组成。
转子铁芯既可以由硅钢片叠压而成,也可以是整块钢加工而成。
根据永磁体放置位置的不同,将转子磁极结构分为表面式和内置式两种。
表面式转子结构的永磁体固定在转子铁芯表面,结构简单,易于制造。
内置式转子结构的永磁体位于转子铁芯内部,不直接面对空气隙,转子铁芯对永磁体有一定的保护作用,转子磁路的不对称产生磁阻转矩,相对于表面式结构可以产生更强的气隙磁场,有助于提高电机的过载能力和功率密度,但转子内部漏磁较大,需要采取一定的隔磁措施,转子结构和加工工艺复杂,且永磁体用量多。
图6-11 典型永磁同步发电机的结构示意图1—定子铁芯;2—定子槽;3—转子铁芯;4—永磁体;5—轴二、外转子永磁同步发电机1.外转子永磁同步风力发电机组外转子永磁同步风力发电机的发电绕组在内定子上,绕组与普通三相交流发电机类似;转子在定子外侧,由多个永久磁铁与外磁轭构成,外转子与风轮轮毂安装成一体,一同旋转。

(一) PMSM 的数学模型交流电机是一个非线性、强耦合的多变量系统。
永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。
在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。
为了简化永磁同步电机的数学模型,我们通常做如下假设:1) 忽略电机的磁路饱和,认为磁路是线性的;2) 不考虑涡流和磁滞损耗;3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波;4) 驱动开关管和续流二极管为理想元件;5) 忽略齿槽、换向过程和电枢反应等影响。
永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下:(l)电机在两相旋转坐标系中的电压方程如下式所示:d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ⎧=+-⎪⎪⎨⎪=++⎪⎩其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。
若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。
cos sin 22cos()sin()3322cos()sin()33a d b q c u u u u u θθθπθπθπθπ⎛⎫ ⎪-⎛⎫⎪⎛⎫ ⎪⎪=--- ⎪ ⎪⎪⎝⎭ ⎪⎪⎝⎭ ⎪+-+⎝⎭(2)d/q 轴磁链方程: d d d f q q qL i L i ψψψ=+⎧⎪⎨=⎪⎩ 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项倍。


永磁同步电机控制算法综述一、本文概述随着能源危机和环境污染问题的日益严重,高效、环保的电机及其控制技术成为了研究热点。
永磁同步电机(PMSM)作为一种具有高功率密度、高效率以及良好调速性能的电机,广泛应用于电动汽车、风力发电、工业自动化等领域。
为了实现永磁同步电机的精确控制,提高其运行性能,研究永磁同步电机的控制算法至关重要。
本文旨在综述永磁同步电机的控制算法,包括其基本原理、发展历程、主要控制策略以及优缺点。
通过对不同类型的控制算法进行梳理和评价,为永磁同步电机的控制策略选择提供理论依据和实践指导。
同时,本文还将探讨永磁同步电机控制算法的未来发展趋势,以期为相关领域的研究人员和技术人员提供参考和借鉴。
在本文中,我们将首先介绍永磁同步电机的基本结构和运行原理,为后续的控制算法分析奠定基础。
接着,我们将重点介绍几种主流的永磁同步电机控制算法,如矢量控制、直接转矩控制、滑模控制等,并详细分析它们的实现原理、优缺点及适用场景。
我们还将讨论一些新兴的控制算法,如基于的控制算法、无传感器控制算法等,以展示永磁同步电机控制算法的最新进展。
我们将对永磁同步电机控制算法的发展趋势进行展望,探讨未来可能的研究方向和技术创新点。
通过本文的综述,我们期望能够为永磁同步电机的控制算法研究提供全面、深入的视角,推动永磁同步电机控制技术的不断发展和优化。
二、PMSM的基本原理永磁同步电机(PMSM)是一种利用永磁体产生磁场的电机。
与传统的电励磁同步电机相比,PMSM不需要额外的励磁电流,因此具有更高的效率和功率密度。
PMSM的基本原理主要基于电磁感应和磁场相互作用。
PMSM的核心部件是永磁体和电枢绕组。
永磁体通常位于电机转子上,产生一个恒定的磁场。
电枢绕组则位于电机定子上,通过通入三相交流电产生旋转磁场。
当旋转磁场与永磁体磁场相互作用时,会产生一个转矩,使电机转子开始旋转。
PMSM的旋转速度可以通过控制电枢绕组中的电流频率和相位来调节。
永磁同步电机各个坐标系下的模型English Answer:Permanent Magnet Synchronous Motor (PMSM) Models in Different Reference Frames.The Permanent Magnet Synchronous Motor (PMSM) is a type of synchronous motor that uses permanent magnets to create the magnetic field in the stator. PMSMs are widely used in a variety of applications, including robotics, electric vehicles, and industrial machinery.To analyze the behavior of a PMSM, it is necessary to develop mathematical models that describe the electrical and mechanical characteristics of the motor. These models can be developed in different reference frames, including the stator reference frame, the rotor reference frame, and the synchronous reference frame.Stator Reference Frame Model.The stator reference frame model is a stationary reference frame that is fixed to the stator of the motor. In this reference frame, the stator currents and voltages are the input variables, and the rotor speed and position are the output variables.The stator reference frame model is typically used for control purposes, as it is relatively easy to implement and can provide good performance. However, the stator reference frame model is not suitable for analyzing the transient behavior of the motor, as it does not take into account the effects of the rotor motion.Rotor Reference Frame Model.The rotor reference frame model is a rotating reference frame that is fixed to the rotor of the motor. In this reference frame, the rotor currents and voltages are the input variables, and the stator speed and position are the output variables.The rotor reference frame model is typically used for analyzing the transient behavior of the motor, as it takes into account the effects of the rotor motion. However, the rotor reference frame model is more complex to implement than the stator reference frame model, and it can be more difficult to obtain good performance.Synchronous Reference Frame Model.The synchronous reference frame model is a rotating reference frame that is fixed to the stator magnetic field. In this reference frame, the stator currents and voltages are the input variables, and the rotor speed and position are the output variables.The synchronous reference frame model is typically used for analyzing the steady-state behavior of the motor, as it provides a simplified representation of the motor's operation. However, the synchronous reference frame modelis not suitable for analyzing the transient behavior of the motor, as it does not take into account the effects of the rotor motion.中文回答:永磁同步电机在不同坐标系下的模型。
交流永磁同步电动机数学模型的建立与分析1模型建立交流永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)根据转子位置可以分为内转子、外转子两种。
主要部件有机座、定子铁心、定子线圈、转子铁芯、永磁体、轴、轴承和电机端盖等,此外还包括转子支撑部件、冷却涵道、接线盒等结构。
PMSM的定子主要指定子绕组与定子铁心部分,对于常见的三相绕组,三相绕组对称分布,各相绕组轴线在空间互差120°,且通入三相绕组的电流相位依次相差120°。
PMSM的转子包括永磁体、转子铁心、转轴、轴承等。
转子提供的磁场主要是由转子铁芯上极性交替的永磁体所发出的,具体气隙平均磁密值大小以及气隙磁密波形的正弦性,主要取决于转子铁芯中永磁体的尺寸、摆放形式以及隔磁措施等因素。
为了所建立模型求解以及推导的便利性,首先对交流永磁同步电动机作如下假设:1)定子绕组Y接,三相绕组对称分布,各相绕组轴线在空间互差120°;转子上的永磁体在定转子气隙内产生主磁场,该磁场沿气隙圆周呈正弦波分布,转子没有阻尼绕组;2)忽略定子绕组的齿槽对气隙磁场分布的影响;3)假设铁心的磁导率时无穷大,不考虑电机定子和转子铁芯的涡流损耗以及磁滞损耗;4)认为定子绕组侧空载反电动势波形为正弦波;5)忽略电动机参数(绕组电阻与绕组电感等)的变化。
图3.1 三相两极PMSM结构简图如图3.1 所示,定子三相绕组AX、BY、CZ沿圆周均匀分布,A、B、C为各项绕组的首端,X、Y、Z为各项绕组的尾端,电流由绕组的首段流出,尾端流入。
此时绕组产生的磁场方向规定为该绕组轴线的正方向,即as、bs 和cs 分别代表A 相、B 相和C 相绕组的轴线,各相绕组分别通入相位相差120° 的电流。
以as、bs、cs为坐标轴,建立三相静止坐标系(如图3.1所示)。
转子的电角位置与电角速度的正方向选取为逆时针方向。
永磁同步电机的仿真模型1、永磁同步电机介绍永磁同步电动机(permanentMagnets synchronousMotor, PMSM>,转子采用永磁材料,定子为短距分布式绕组,采用三相正弦波交流电驱动,且定子感应电动势波形呈正弦波"定子绕组通过控制功率管(如IGBT>的不同开关组合,产生旋转磁场跟踪永磁转子的位置,自动地维持与转子的磁场有900的空间夹角,以产生最大的电机转矩"旋转磁场的转速则严格地由永磁转子的转速所决定,PMSM具有直流电动机的特性,有稳定的起动转矩,可以自行起动,并可类似直流电动机对电机进行闭环控制,多用于伺服系统和高性能的调速系统。
永磁同步电动机按转子形状可以分为两类:凸极式永磁同步电机和隐极式永磁同步电机。
它们的区别在于转子磁极所在的位置,凸极式永磁同步电机转子磁极是突起在轴上的,其直轴和交轴电感参数不相等"而隐极式永磁同步电机的转子磁极是内置在轴内的,直轴和交轴电感参数相等"凸极式转子具有明显的磁极,定子和转子之间的气隙是不均匀的,因此其磁路与转子的位置有关。
2、永磁同步电机的控制方法目前对永磁同步电机的控制技术主要有磁场定向矢量控制技术< field orientation control,FOC)与直接转矩控制技术<direct torque control,DTC)。
在这里我们使用磁场定向矢量控制技术来建立永磁同步电机的仿真模型。
磁场定向矢量控制技术的核心是在转子旋转坐标系中针对激磁电流id和转矩电流iq分别进行控制,并且采用的是经典的PI线性调节器,系统呈现出良好的线性特性,可以按照经典的线性控制理论进行控制系统的设计,逆变器控制采用了较成熟的SPWM、SVPWM等技术。
磁场定向矢量控制技术较成熟,动态、稳态性能较佳,所以得到了广泛的实际应用。
该方法摒弃了矢量控制中转子磁场定向的思想,采用定子磁场定向,分别对定子磁链和转矩直接进行控制。
(一) PMS M的数学模型交流电机是一个非线性、强耦合的多变量系统。
永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。
在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。
为了简化永磁同步电机的数学模型,我们通常做如下假设:1) 忽略电机的磁路饱和,认为磁路是线性的;2) 不考虑涡流和磁滞损耗;3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波;4) 驱动开关管和续流二极管为理想元件;5) 忽略齿槽、换向过程和电枢反应等影响。
永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下:(l)电机在两相旋转坐标系中的电压方程如下式所示:d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ⎧=+-⎪⎪⎨⎪=++⎪⎩其中,R s为定子电阻;u d、uq 分别为d 、q 轴上的两相电压;i d、iq 分别为d、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。
若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。
cos sin 22cos()sin()3322cos()sin()33a d b q c u u u u u θθθπθπθπθπ⎛⎫ ⎪-⎛⎫⎪⎛⎫ ⎪⎪=--- ⎪ ⎪⎪⎝⎭ ⎪⎪⎝⎭ ⎪+-+⎝⎭(2)d/q轴磁链方程: d d d f q q qL i L i ψψψ=+⎧⎪⎨=⎪⎩ 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项绕倍.(3)转矩方程:32e d q q d T p i i ψψ⎡⎤=-⎣⎦ 把它带入上式可得:3()233()22e f q d q d q f q d q d q T p i L L i i p i p L L i i ψψ⎡⎤=+-⎣⎦=+- 对于上式,前一项是定子电流和永磁体产生的转矩,称为永磁转矩;后一项是转 子突极效应引起的转矩,称为磁阻转矩,若Ld=Lq ,则不存在磁阻转矩,此时,转矩方程为:32e f q t q T p i k i ψ== 这里,t k 为转矩常数,32t f k p ψ=. (4)机械运动方程: m e m L d T J B T dtωω=++ 其中,m ω是电机转速,L T 是负载转矩,J 是总转动惯量(包括电机惯量和负载惯量),B 是摩擦系数.(二) 直线电机原理永磁直线同步电机是旋转电机在结构上的一种演变,相当于把旋转电机的定子和动子沿轴向剖开,然后将电机展开成直线,由定子演变而来的一侧称为初级,转子演变而来的一侧称为次级。