无感无刷直流电机之电调设计全攻略
- 格式:pdf
- 大小:4.51 MB
- 文档页数:97
揭秘无刷无传感器直流电机控制原理目前常用的无刷直流电机控制方法可分为开环控制、转速负反馈控制和电压负反馈加电流正反馈控制等3 类。
其中开环控制方式适合于转速精度要求不高的场合,转速负反馈方式适合于机械特性要求比较硬、转速精度比较高的场合,而电压负反馈电流正反馈方式则应用于动态性能要求比较高的场合。
对于航模用的无刷直流电机,转速精度要求并不很高,使用开环控制方式就可满足要求。
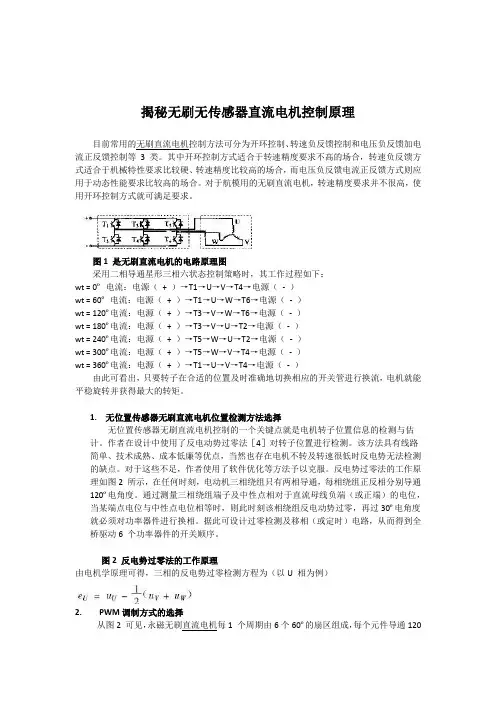
图1 是无刷直流电机的电路原理图采用二相导通星形三相六状态控制策略时,其工作过程如下:wt = 0º电流:电源(+ )→T1→U→V→T4→电源(- )wt = 60º电流:电源(+ )→T1→U→W→T6→电源(- )wt = 120º电流:电源(+ )→T3→V→W→T6→电源(- )wt = 180º电流:电源(+ )→T3→V→U→T2→电源(- )wt = 240º电流:电源(+ )→T5→W→U→T2→电源(- )wt = 300º电流:电源(+ )→T5→W→V→T4→电源(- )wt = 360º电流:电源(+ )→T1→U→V→T4→电源(- )由此可看出,只要转子在合适的位置及时准确地切换相应的开关管进行换流,电机就能平稳旋转并获得最大的转矩。
1. 无位置传感器无刷直流电机位置检测方法选择无位置传感器无刷直流电机控制的一个关键点就是电机转子位置信息的检测与估计。
作者在设计中使用了反电动势过零法[4]对转子位置进行检测。
该方法具有线路简单、技术成熟、成本低廉等优点,当然也存在电机不转及转速很低时反电势无法检测的缺点。
对于这些不足,作者使用了软件优化等方法予以克服。
反电势过零法的工作原理如图2 所示,在任何时刻,电动机三相绕组只有两相导通,每相绕组正反相分别导通120º电角度。
通过测量三相绕组端子及中性点相对于直流母线负端(或正端)的电位,当某端点电位与中性点电位相等时,则此时刻该相绕组反电动势过零,再过30º电角度就必须对功率器件进行换相。
无刷直流电机设计流程嘿,朋友!今天咱就来唠唠无刷直流电机设计这档子事儿。
这无刷直流电机啊,就像是一个神奇的小宇宙,里面藏着好多学问呢。
要开始设计无刷直流电机,第一步就得明确它的用途。
这就好比你要盖房子,得先知道这房子是用来住人啊,还是做仓库。
我有个朋友叫小李,他想设计一个用于小型无人机的无刷直流电机。
那他就得考虑这个电机要足够轻便,动力还得强劲,能让无人机飞得又稳又快。
这时候就像是给这个电机定了个大方向,就像航海的时候有了指南针一样。
接下来就是确定电机的主要参数啦。
这里面的门道可不少呢。
比如说额定功率、额定转速、转矩这些。
这额定功率啊,就像是一个人的力气大小。
要是功率定小了,就像让一个小孩去干大人的活,根本带不动嘛!而转速就好比一个人跑步的速度,转矩呢,有点像一个人能使出来的爆发力。
我曾经见过一个新手在设计无刷直流电机时,乱定参数,结果电机造出来,那性能差得呀,就像一辆破自行车,怎么骑都费劲。
选磁钢材料也是很关键的一步。
这磁钢材料就像是电机的灵魂所在。
不同的磁钢材料性能差别可大了去了。
有铁氧体磁钢,还有稀土永磁材料呢。
稀土永磁材料虽然贵一些,但是它的性能就像超级英雄一样厉害。
我跟同行老张讨论的时候,他就说:“这稀土永磁材料就像魔法材料一样,能让电机的性能一下子提升好几个档次,不过成本就像个拦路虎啊。
”这时候就得在性能和成本之间权衡,就像走钢丝一样,得小心翼翼。
然后就是绕组的设计啦。
绕组就像是电机的经脉一样。
绕组的匝数、线径这些都很重要。
匝数多了,就像给电机穿上了厚厚的衣服,电阻增大,电流就不好通过了。
匝数少了呢,又像是衣服穿得太薄,性能也会受影响。
这时候就得像裁缝一样,精心剪裁,找到最合适的匝数和线径。
我在学习绕组设计的时候,可没少向老师傅请教。
老师傅就说:“这绕组设计啊,就像绣花,一针一线都得恰到好处。
”转子和定子的设计也不能马虎。
转子就像电机的心脏,定子就像它的外壳。
转子的结构形状会影响电机的转动惯量。
收稿日期:2005-12-06作者简介:戴敏(1977—),女,江苏泰兴人,在读博士研究生,主要研究方向为机械制造及其自动化技术。
航模直流无刷无感电机调速控制系统设计戴 敏,曹 杰,史金飞(东南大学机械工程系,江苏南京 210096)摘要:针对航模用无传感器无刷直流电机的特点,设计开发了其专用调速控制系统。
首先分析了无传感器无刷直流电机的位置检测方法、P WM 调制方式和启动策略等控制原理。
接着以MEG A8单片机为核心设计了硬件系统,对几个关键控制电路给出了原理图并进行了详细阐述。
最后还给出了系统控制多种航模用电机的测试结果。
关键词:无位置传感器;无刷直流电机;控制系统;MEG A8中图分类号:T M301 文献标识码:B 文章编号:1000-8829(2006)07-0030-04D esi gn of a Speed 2Adjust m en t Con trol System for Sen seless Brushless DC M otorDA IM in,CAO J ie,SH I J in 2fei(M echanical Engineering Depart m ent,Southeast University,Nanjing 210096,China )Abstract:A s peed 2adjust m ent contr ol syste m of senseless brushless DC mot or in aer omodelling is intr oduced .Some basic theories,such as methods of positi on detecti on,P WM contr ol and starting policy of senseless BLD 2C M are disserted in the first .The hardware design is based on MEG A8m icr ocontr oller .Some key contr ol cir 2cuits are discussed .Finally,a test result of contr olling multi 2sens orless BLDC M in aer omodelling is s pecified .Key words:senseless;brushless DC mot or (BLDC M );contr ol syste m;MEG A8 航模用无刷直流电机(BLDC M )具有体积小、重量轻、效率高和可靠性高等优点,由于航模领域的特殊性,对于电机的控制系统也提出了一些特殊的要求,其中最重要的就是要求控制系统的体积小、质量轻。
无刷电调编程讲解
无刷电调是一种电子元件,常用于控制电机的转速和方向。
为了实现不同的功能,需要对无刷电调进行编程。
下面是无刷电调编程的讲解:
1. 确定编程设备:通常使用电脑和USB转串口线作为编程设备。
2. 安装编程软件:根据无刷电调的品牌和型号,选择相应的编程软件并安装。
3. 连接电调和编程设备:将USB转串口线连接到电脑的USB端口上,另一头连接到电调的编程口上。
4. 进入编程模式:根据电调的说明书,按压指定按键或操作指令,进入编程模式。
5. 编写程序:在编程软件中编写程序,实现电调所需的功能。
常见的功能包括调整最大电流、最大转速和刹车时间等。
6. 下载程序:将编写好的程序下载到电调中,以实现相应的功能。
7. 测试:将电调和电机连接,进行测试以确认编程是否成功。
如果存在问题,可以重新进入编程模式并修改程序。
以上就是无刷电调编程的基本讲解,希望能够帮助大家更好地理解和使用无刷电调。
- 1 -。
无刷直流电动机优化设计的方法摘要:本文论述了无刷直流电动机优化设计的方法,根据产品的运行条件,配合电动机绕线设计,进角控制设计,驱动器通电波形,优化电动机的整体设计,使电动机高效率运行,节省能源。
对降低电动机扭矩脉动,减少电动机的噪声、震动也进行了说明。
关键词:无刷直流电动机效率进角控制脉宽调制技术PWM 扭矩脉动矢量控制前言:无刷直流电动机具有结构简单,输出转矩大,调速范围宽,速度控制精准,效率高等优点,在汽车、工具、自动化设备、智能化电器、航空航天等领域应用广泛。
运行效率是评价电机设计的重要指标,使电机运行在最佳效率,能有效节省能源,减少发热,提高电机的使用寿命。
扭矩脉动对电动机的噪声、震动有不利影响,在对噪声、振动要求高的时候,也需要进行适当抑制,以减少噪声、震动,延长电动机寿命。
1.无刷直流电动机1.1无刷直流电动机的构造(图1)。
无刷直流电机由定子绕组、转子、壳体和驱动器组成。
定子绕组多做成三相对称星形接法,转子上粘有充磁的永磁体,壳体可由金属或热塑性材料成型,驱动器由驱动模块集成电路和电子元器件等构成。
无刷直流电动机的构造(图1)1.2无刷直流电动机的工作原理。
如图2所示,直流电源给开关线路(驱动器)供电,驱动器根据位置传感器反馈的转子极性和位置信号,控制驱动器内的晶体管开关,给电机定子三相绕组提供电源,电流流入三相绕组,与定子铁心共同作用产生磁场,驱动器根据控制信号,控制晶体管的开关时间与顺序,使定子产生旋转磁场,旋转磁场与转子相互作用,从而驱动转子运转。
无刷直流电动机的工作原理(图2)1.效率(图3)电动机效率计算公式为η=(P1/P2)X100%。
P1:电动机输出功率,单位瓦特(W);P2电动机输入功率,单位瓦特(W);效率用字母“η”表示。
无刷直流电动机的效率也可表示为η=TXN/9.55X100%。
T:扭矩,单位:牛·米(N·m);N:转速,单位转/分钟(RPM)。
目录1绪论 (1)1.1 直流无刷电动机发展状况 (1)1.2直流无刷电机控制技术的发展 (1)2 直流无刷电动机的工作原理 (3)2.1 直流无刷电动机的结构与原理 (3)2.2三相绕组直流无刷电动机控制主回路的基本类型 (4)2.3直流无刷电动机控制系统中的PWM控制器 (5)3 直流无刷电动机控制系统的数学模型 (6)3. 1直流无刷电动机的基本方程 (8)3. 2直流无刷电动机控制系统的动态数学模型 (11)4 硬件电路 (13)4.1 主电路 (13)4.2换相电路 (15)5 软件部分设计 (17)5. 1软件总体构成 (17)5. 2主程序的设计 (17)5. 3中断子程序的设计 (19)结论 (21)参考文献 (22)致谢 (23)1绪论1.1 直流无刷电动机发展状况电动机作为机电能量转换装置,其应用范围已经遍及国民经济的各个领域,电动机主要类型有同步电动机、异步电动机与直流电动机三种。
直流电动机具有运行效率高和调速性能好等诸多优点,因此被广泛应用于各种调速系统中。
但传统的直流电动机均采用机械电刷的方式进行换向,存在相对的机械摩擦,和由此带来的噪声、火花、无线电干扰以及寿命短等致命弱点。
因此,早在1917年,Bulgier就提出了用整流管代替有刷直流电机的机械电刷,从而诞生了无刷直流电机(BLDCM: Brushless Direct Current Motor)的基本思想。
1955年,美国D·Harrison等人首次申请了用晶体管换向线路代替有刷直流电机机械电刷的专利,标志着无刷直流电机的诞生。
1978年,原联邦德国MANNESMANN公司的Indramat分部在汉诺威贸易展览会上正式推出其MAC永磁无刷直流电机及其驱动系统,标志着永磁无刷直流电机真正进入了实用阶段。
二十世纪80年代国际上对无刷电机开展了深入的研究,先后研制成方波和正弦波无刷直流电机,在10多年的时间里,无刷直流电机在国际上己得到较为充分的发展。
电动自行车作为一种环保的交通工具已得到了广泛使用。
直流无刷电机及控制器是电动自行车中的关键部件,其性能决定了整个系统的电能转换效率。
控制器根据霍尔传感器输出信号,驱动3相全桥电路,实现对直流无刷电机的控制,因此霍尔信号的准确性及换相的实时性会直接影响电机的性能。
在现有电动自行车控制器方案中,霍尔传感器信号的采集均采用软件扫描形式进行,换相操作也通过软件处理,换相误差大,实时性差,尤其对中高速电机更为明显。
而英飞凌公司的XC866/846可以支持硬件霍尔信号采集、换相操作,且无需额外电路即可实现同步整流控制,单片机利用率高,电机控制性能好。
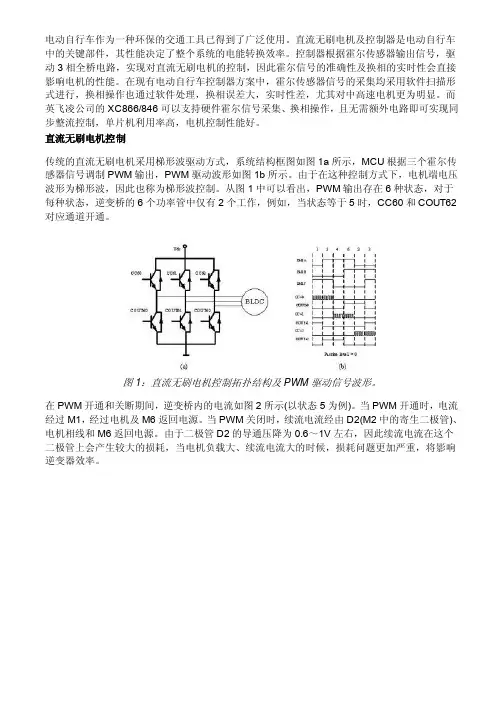
直流无刷电机控制传统的直流无刷电机采用梯形波驱动方式,系统结构框图如图1a所示,MCU根据三个霍尔传感器信号调制PWM输出,PWM驱动波形如图1b所示。
由于在这种控制方式下,电机端电压波形为梯形波,因此也称为梯形波控制。
从图1中可以看出,PWM输出存在6种状态,对于每种状态,逆变桥的6个功率管中仅有2个工作,例如,当状态等于5时,CC60和COUT62对应通道开通。
图1:直流无刷电机控制拓扑结构及PWM驱动信号波形。
在PWM开通和关断期间,逆变桥内的电流如图2所示(以状态5为例)。
当PWM开通时,电流经过M1,经过电机及M6返回电源。
当PWM关闭时,续流电流经由D2(M2中的寄生二极管)、电机相线和M6返回电源。
由于二极管D2的导通压降为0.6~1V左右,因此续流电流在这个二极管上会产生较大的损耗,当电机负载大、续流电流大的时候,损耗问题更加严重,将影响逆变器效率。
图2:简单梯形波控制中的电流示意图。
为减少续流电流在寄生二极管上产生的损耗,在一些应用中使用MOSFET作为逆变元件。
由于MOFSET具有导通阻抗低、电流可以双向流动的特点,在M1关断,进入续流阶段时,开通M 2,使续流电流流经M2,由于MOSFET的导通阻抗极低,损耗很小,例如当续流电流为10A,MOSFET导通电阻10mΩ,二极管D2压降0.7v时,若续流电流流经D2时产生损耗为7W,而流经MOSFET时产生损耗仅为1W,因此使用这种控制方式可以减少损耗,提高逆变器的效率,在续流电流大的情况下效果更加明显。
直流无刷电机的控制系统设计方案直流无刷电机(BLDC)是一种能够提供高效可靠的电动机驱动方案的电机。
它具有高效率、高功率密度、长寿命和低噪音等特点,广泛应用于工业、汽车和消费电子等领域。
在这篇文章中,我们将探讨直流无刷电机控制系统的设计方案。
一、控制器选择选择合适的控制器对于直流无刷电机的性能至关重要。
常见的控制器包括传感器基本反馈控制器和无位置传感器矢量反馈控制器。
1.传感器基本反馈控制器:传感器基本反馈控制器通过对电机速度和位置的测量反馈来控制电机。
它具有简单的硬件结构和易于实现的特点,适用于对控制精度要求不高和成本要求较低的应用。
2.无位置传感器矢量反馈控制器:无位置传感器矢量反馈控制器通过使用电流、电压和速度等参数来估计电机的位置和速度,从而进行闭环控制。
它能够提供更高的控制精度和动态性能,适用于对控制精度要求较高的应用。
二、传感器选择1.霍尔传感器:霍尔传感器通过检测电机转子上的永磁体磁场变化来确定电机的位置。
它具有结构简单、成本低和使用方便等优点,适合于低成本和低精度的应用。
2.编码器:编码器通过检测电机转子的机械运动,如转子的转速和位置来确定电机的位置。
它具有较高的精度和抗干扰能力,适用于对控制精度要求较高的应用。
3.霍尔传感器与编码器混合使用:为了兼顾成本和精度要求,可以采用霍尔传感器与编码器混合使用的方式进行控制。
霍尔传感器用于测量电机的粗位置信息,编码器用于提供更精确的位置和速度信息。
三、控制策略选择1.电流控制:电流控制是直接控制电机的电流大小和方向,从而控制电机的转矩。
它具有快速响应和较高的控制精度等优点,适用于对控制精度要求较高的应用。
2.速度控制:速度控制是通过控制电机输入电压或电流的大小来控制电机的转速。
它具有稳定性好、抗负载扰动能力强等优点,适用于需要稳定转速的应用。
3.位置控制:位置控制是通过控制电机输入电压或电流的大小来控制电机的位置。
它具有控制精度高、抗负载扰动能力强等优点,适用于需要精确定位的应用。
调速传动系统的各项重要指标:1)、调速范围:最高与最低转速相比。
2)、调速平滑性:相邻两档转速的差值越小越平滑。
3)、调速的工作特性:静态特性主要是调速后机械特性的硬度,对绝大多数负载,机械特性越硬,则负载变化时,速度变化越小,工作越稳定。
动态特性主要为升速和降速过程是否快而平稳。
当负载突然增减与电压突然变化时,系统转速能否迅速地恢复。
4)、调速系统的经济性。
主要从价格、调速运行效率、调速系统故障率,售后服务与支持等方面衡量。
5)、负载转矩特性:一般来说空气、水、油等介质对机械阻力基本上都是和转速二次方成正比。
即负载转矩TZ=KN2电动直升机航模用的动力一般为无刷直流电动机,无刷直流电动机的结构与交流永磁同步电动机相似,其定子上有多相绕组,转子上镶有永磁体,无刷直流电动机的优点和关键特征如下:1)本质上是多相交流电动机,但经过控制获得类似直流电动机特性;2)需要多相逆变器驱动;3)无电刷和换相器,即使在高转速下,也可得到较高的可靠性;4)效率高;5)低的EMI6)可实施无传感器控制;按照无刷直流电动机工作原理,必须有转子磁极位置信号来决定电子开关的换相。
装有转子位置传感器(例如霍尔元件)就称为有感无刷电机。
有感无刷电机装传感器检测电气相位可分为60°/120°/180°/240°/300°等。
根据电气相位的不同,电子换相驱动方式就略有不同,开关时序将不同,如6步换相180°变频:经过6个节拍,无刷电机的定子中将产生一个旋转磁场,带动转子转动,每个开关的一个状态在连续的3个节拍中保持不变,相当于在磁场中180°的范围内保持不变。
6步换相120°变频:则每个开关的一个状态在连续的2个节拍中保持不变,相当于在磁场中120°的范围内保持不变。
位置传感器的存在占用了电动机的一些空间、安装位置对准、需要引出线等问题,随着微机控制技术的高速发展,无位置传感器控制技术和方法也获得快速进展,利用无传感器技术,无刷直流电动机不必装专门的位置传感器,从而简化电动机结构和尺寸,减少了引线,进而降低电动机成本。

技术资料汇总:BLDC无刷电机基础电调设计全攻略等干货资料:无刷直流 (BLDC) 电机基础(中英)无刷直流( Brushless Direct Current , BLDC )电机是一种正快速普及的电机类型,它可在家用电器、汽车、航空航天、消费品、医疗、工业自动化设备和仪器等行业中使用。
正如名称指出的那样,BLDC 电机不用电刷来换向,而是使用电子换向。
此外,由于输出转矩与电机体积之比更高,使之在需要着重考虑空间与重量因素的应用中,大有用武之地。
在本应用笔记中,我们将详细讨论 BLDC 电机的构造、工作原理、特性和典型应用。
无刷直流(BLDC)电机基础_CN.pdf图解传感器入门雨宫 178页 2.8M图解电机电器饭高 191页 5.2M图解机电一体化电子学入门雨宫 199页 3.3M图解传感器入门图解电机电器图解机电一体化电子学入门.zip(9.8 MB)介绍:无感无刷直流电机之电调设计全攻略.pdf(4.58 MB, 下载次数: 104)目录:一篇文章带你了解无刷电机控制原理我们常用的无刷电机里面究竟有些什么技术、如何解释那些专业名词、以及各种参数和设备之间究竟有什么区别和联系呢?电机驱动器PCB布局准则,讲得非常好电机驱动电路的PCB 需要采用特殊的冷却技术,以解决功耗问题。
PCB基材的导热性较差。
相反,铜的导热性非常出色。
因此,从热管理角度来看,增加PCB 中的铜面积是一个理想方案。
厚铜箔的导热性优于较薄的铜箔。
然而,使用厚铜箔的成本较高,并且难以实现精细的几何形状。
电路集锦直流电机控制电路集锦直流电机驱动电路图与设计思路BLDC电机控制原理分析、电路设计技巧BLDC电机控制中的角度传感器一个电机短路保护电路的三极管详解实例/图例使用步进电机做驱动的机器人小车DIYDIY 可调速直流电机风扇开发板上手之电机调试开发板上手之步进电机扩展板小型减速电机拆解各种电机原理动态SHOW超声电机技术详解实用理论动图解析,无刷电机与有刷电机的区别什么是 BLDC 电机换向的最有效方法?当低压BLDC电机驱动电器子系统时会发生什么?探讨BLDC电机的运行,以及紧凑电机控制系统设计交流异步电机,异步在哪儿?电机的11个常用知识点如何选择机器人电机机器人常用的电机有哪些?基础知识:机器人常用电机解析及区别无人机的四个电机为什么这样布局?关于伺服电机的21个关键问题。
自制无刷电机电调拆个硬盘电机,把原来的线拆了,用大电的线重新绕上定子,每个绕上20圈,加了颗螺丝方便以后固定
转子,没改过,如果有可能的话自己换上磁铁就更好
组合,还可以
正面
用TDA2030,做了个电调
最好加上散热
引用网上的电路图,我的是把2050换成2030,接法一样的
完成,三条线自己任意组合,改变其中两条可以反转电机转向,红色是正,黑色是负。
由于TDA2030功率比较小,所以转速不是很高。
(资料素材和资料部分来自网络,供参考。
可复制、编制,期待你的好评与关注)。
直流无刷电机 pid调速毕业设计_基于单片机和PID算法的直流电机调速设计(原创)导读:就爱阅读网友为您分享以下“毕业设计_基于单片机和PID算法的直流电机调速设计(原创)”的资讯,希望对您有所帮助,感谢您对92to 的支持!摘要在运动控制系统中,电机转速控制占有至关重要的作用,其控制算法和手段有很多,模拟PID控制是最早发展起来的控制策略之一,长期以来形成了典型的结构,并且参数整定方便,能够满足一般控制的要求,但由于在模拟PID控制系统中,参数一旦整定好后,在整个控制过程中都是固定不变的,而在实际中,由于现场的系统参数、温度等条件发生变化,使系统很难达到最佳的控制效果,因此采用模拟PID控制器难以获得满意的控制效果。
随着计算机技术与智能控制理论的发展,数字PID技术渐渐发展起来,它不仅能够实现模拟PID所完成的控制任务,而且具备控制算法灵活、可靠性高等优点,应用面越来越广。
本设计以上面提到的数字PID为基本控制算法,以AT89S51单片机为控制核心,产生占空比受数字PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采数码管显示器作为显示部件,通过2×2键盘设置P、I、D、V四个参数,启动后可以通过显示部件了解电机当前的转速。
该系统控制精度高,具有很强的抗干扰能力。
关键词:数字PID;PWM脉冲;占空比;无静差调节AbstractIn the motion control system,the control of electromotor's rotate speed is of great importance,there are a lot of speed control arithmetics andmethods ,the analog PID control is one of the earliest developed control policies which has formed typical structure ,its parametric setting is convenient and it's easy to meet normal control's demand,but as the whole control process is fixed once the parameter has been set while practically the changes of those conditions like the system parameters and temperature of the environment prohibit the system from reaching its best control effect,so the analog PID controller barely has satisfied effect.With the development of computer technology and intelligent control theory ,the digital PID technology is thriving which can achieve the analog PID's control tasks and consists of many advantages like flexible control arithmetics and high reliability,it is widely used now.This design is based on the digital PID mentioned above as basic control arithmetic and AT89S51 SCM as control core,the system produces PWM impulse whose duty ratio is controlled by digital PID arithmetic to make sure the running of direct current machine's rotate speed.Meanwhile,the design uses photoelectric sensor to transduce the electromotor speed into impulse frequencyand feed it back to SCM,this process implements rotate speed's closed loop control to attain the purpose of rotate speed's astatic modulation.In this system, the 128×64LCD is used as display unit , the 4×4 keyboard sets those four parameters P、I、D、V and obverse and reverse control,after starting up,the display unit shows the electromotor's current rotate speed and runtime.The system has great control precision and anti-jamming capability.Keywords:digital PID;PWM impulse;dutyfactor;astatic modulation前言21世纪,科学技术日新月异,科技的进步带动了控制技术的发展,现代控制设备的性能和结构发生了翻天覆地的变化。
无感无刷直流电机之电调设计全攻略前 言 (1)1. 无刷直流电机基础知识 (2)1.1 三个基本定则 (2)1. 左手定则 (2)2. 右手定则(安培定则一) (3)3. 右手螺旋定则(安培定则二) (3)1.2 内转子无刷直流电机的工作原理 (3)1. 磁回路分析法 (4)2. 三相二极内转子电机结构 (5)3. 三相多绕组多极内转子电机的结构 (7)1.3外转子无刷直流电机的工作原理 (8)1. 一般外转子无刷直流电机的结构 (8)2. 新西达2212外转子电机的结构 (8)1.4 无刷直流电机转矩的理论分析 (14)1. 传统的无刷电机绕组结构 (14)2. 转子磁场的分布情况 (15)3. 转子的受力分析 (16)4. 一种近似分析模型 (18)1.5 换相与调速 (19)1. 换相基本原理 (19)2. 新西达2212电机的换相分析 (24)3. 调速 (28)2. 无感无刷电调的驱动电路设计 (30)2.1 电池电压监测电路 (30)2.2 换相控制电路 (30)1. 六臂全桥驱动电路原理 (31)2. 功率场效应管的选择 (33)2.3 电流检测电路 (45)2.4 反电势过零检测电路 (49)2.5 制作你自己的电调线路板 (50)3. 无感无刷电调的软件设计 (52)3.1 电流检测 (52)3.2 定时器延时与PWM信号 (53)1. 定时器初始化 (54)2. 定时器T0的溢出中断服务程序 (54)3. 利用T0延时(毫秒极) (54)4. 利用T0延时(微秒极) (55)5. PWM信号的产生 (55)3.3 过零事件检测与电机换相 (56)1. BLMC.h中定义的宏 (56)2. 过零检测与换相代码分析 (59)3.4 启动算法 (63)1. 函数Anwerfen启动流程分析 (63)2. 启动算法机理探究 (65)3.5 上电时的MOSFET自检 (68)1. 函数Delay和DelayM (68)2. 函数MotorTon自检流程分析 (68)3.6 让你的电机演奏音乐 (70)3.7 通信模块 (72)1. PPM解码 (72)2. TWI总线通信 (74)3. 串口通信 (74)4. 指令的收入函数SollwertErmittlung (75)4. 德国MicroKopter项目BL-Ctrl电调程序主程序代码流程分析(V0.41版本) (77)5.1 全局变量列表 (78)5.2 main主函数流程分析 (80)1. 进入while(1)前的准备工作 (80)2. while(1)主循环内容分析 (81)5. 高级话题 (86)5.1 电机的控制模型 (86)5.2 四轴上的校正策略 (87)附录一 (88)附录二 (89)附录三 (93)附录四 (94)前 言关注开源四轴项目也有近一年了,前期都以潜水为主,业余时间主要是在啃那些控制和导航的理论书籍。
无感无刷直流电机之电调设计全攻略前 言 (1)1. 无刷直流电机基础知识 (2)1.1 三个基本定则 (2)1. 左手定则 (2)2. 右手定则(安培定则一) (3)3. 右手螺旋定则(安培定则二) (3)1.2 内转子无刷直流电机的工作原理 (3)1. 磁回路分析法 (4)2. 三相二极内转子电机结构 (5)3. 三相多绕组多极内转子电机的结构 (7)1.3外转子无刷直流电机的工作原理 (8)1. 一般外转子无刷直流电机的结构 (8)2. 新西达2212外转子电机的结构 (8)1.4 无刷直流电机转矩的理论分析 (14)1. 传统的无刷电机绕组结构 (14)2. 转子磁场的分布情况 (15)3. 转子的受力分析 (16)4. 一种近似分析模型 (18)1.5 换相与调速 (19)1. 换相基本原理 (19)2. 新西达2212电机的换相分析 (24)3. 调速 (28)2. 无感无刷电调的驱动电路设计 (30)2.1 电池电压监测电路 (30)2.2 换相控制电路 (30)1. 六臂全桥驱动电路原理 (31)2. 功率场效应管的选择 (33)2.3 电流检测电路 (45)2.4 反电势过零检测电路 (49)2.5 制作你自己的电调线路板 (50)3. 无感无刷电调的软件设计 (52)3.1 电流检测 (52)3.2 定时器延时与PWM信号 (53)1. 定时器初始化 (54)2. 定时器T0的溢出中断服务程序 (54)3. 利用T0延时(毫秒级) (54)4. 利用T0延时(微秒级) (55)5. PWM信号的产生 (55)3.3 过零事件检测与电机换相 (56)1. BLMC.h中定义的宏 (56)2. 过零检测与换相代码分析 (59)3.4 启动算法 (63)1. 函数Anwerfen启动流程分析 (63)2. 启动算法机理探究 (65)3.5 上电时的MOSFET自检 (68)1. 函数Delay和DelayM (68)2. 函数MotorTon自检流程分析 (68)3.6 让你的电机演奏音乐 (70)3.7 通信模块 (72)1. PPM解码 (72)2. TWI总线通信 (74)3. 串口通信 (74)4. 指令的收入函数SollwertErmittlung (75)4. 德国MicroKopter项目BL-Ctrl电调程序主程序代码流程分析(V0.41版本) (77)5.1 全局变量列表 (78)5.2 main主函数流程分析 (80)1. 进入while(1)前的准备工作 (80)2. while(1)主循环内容分析 (81)5. 高级话题 (86)5.1 电机的控制模型 (86)5.2 四轴上的校正策略 (87)附录一 (88)附录二 (89)附录三 (93)附录四 (94)前 言关注开源四轴项目也有近一年了,前期都以潜水为主,业余时间主要是在啃那些控制和导航的理论书籍。
一种型三相无感无刷直流电机控制器设计一、引言无感无刷直流电机由于其高效率、高输出功率、高转速范围和无需换向装置等特点,在各种电动化系统中被广泛应用。
直流电机控制器是无刷直流电机工作的关键装置,负责驱动和控制电机的转速、转向和输出功率。
本文将介绍一种型三相无感无刷直流电机控制器的设计方案。
二、控制器原理该控制器采用电压源逆变型控制结构,原理如下:1.电源部分:直流电源经过滤波,得到稳定的高电压直流电源。
2.逆变器部分:电源经过逆变器转换为三相交流电压,驱动无刷直流电机。
逆变器采用全控桥式逆变电路,通过PWM技术控制开关器件的导通和断开,实现对输出交流电压的控制。
具体来说,逆变器的工作周期被分为多个小时段,每个小时段内通过对两个相邻导通的晶闸管进行控制,实现输出交流电压的正弦波控制。
3.电流检测:逆变器输出端电流经过电流检测电路进行采样和处理,得到电流的反馈信号。
4.速度控制:电流反馈信号与速度目标参考信号进行比较,经过PID控制算法进行处理,得到控制信号。
5.驱动信号:控制信号经过驱动电路放大后,用来控制逆变器开关器件的导通和断开。
6.转速反馈:通过使用霍尔传感器或者编码器等装置来检测转子位置,得到转速反馈信号。
三、设计方案1.控制芯片选择:选用高性能的数字信号处理器(DSP)作为控制器的核心芯片,用于实时采集和处理电流、速度等信号,并生成控制信号。
2.逆变器设计:选择功率开关器件,并设计逆变器电路。
根据电机的额定功率、工作电压和控制需求,确定电路的参数和元件。
3.电流检测电路设计:选择合适的电流传感器,并设计相应的检测电路,用于采集和处理逆变器输出端的电流信号。
4.速度控制算法设计:根据应用需求和电机特性,设计合适的PID控制算法,用于根据电流反馈信号和速度目标参考信号,生成控制信号。
5.驱动电路设计:选用合适的驱动器件,并设计驱动电路,用于放大控制信号,并驱动逆变器的开关器件。
6.转速反馈设计:根据应用需求,选择合适的转子位置检测装置,如霍尔传感器或者编码器等,用于检测转速反馈信号。
直流无刷电机调速系统设计摘要本文首先介绍了三相直流无刷电机在国内外的发展及其控制系统的研究现状,详细论述了三相永磁直流无刷电机的构成、运行原理、特性分析和其转子位置信号的检测方法;然后设计了控制系统的硬件电路及相应软件。
首先电机的选用问题。
本系统选用了应用比较广泛的三相电机,好处是容易买到还有就是控制比较准确。
三相直流无刷电机是近年来迅速发展起来的一种新型电机,它利用电子换相代替机械换相,既具有直流电机的调速性能,又具有交流电机结构简单、运行可靠、维护方便等优点,并且体积小、效率高,在许多领域已得到了广泛的运用。
本系统以单片机为核心,控制电路为转速闭环控制控制这样可以保证转速控制的准确性和快速性。
因为转速是本系统最重要的数据。
进行调速的方法有很多种本系统经过多方面的比较,最终确定利用PWM技术实现电机的调速。
这样可以保证最终的转速具有一定准确性。
由于考虑到显示效果的因素,本系统选用液晶显示转速。
关键词:直流无刷电机,调速, PWM,PID闭环控制DC Brushless Motor Speed Control SystemABSTRACTThis paper introduces the three-phase DC brushless motor in the domestic and international development and control system status, detail of three-phase permanent magnet brushless DC motor structure, operating principles, characterization and the rotor position signal detection method ; and then design the control system hardware and corresponding software.First, the selection of motor problems. This system use a broader application of three-phase motor, it is easy to get there is the advantage of more accurate control. Three-phase DC brushless motor is developed rapidly in recent years a new type of motor that uses electronic commutation to replace mechanical commutation, both with DC motor speed performance, but also has the AC motor is simple, reliable operation, easy maintenance, etc. advantages, and small size, high efficiency, in many areas have been widely used.Microcontroller as the core of this system, closed loop control circuit to control speed control speed control that can ensure the accuracy and rapidity. Because the system speed is the most important data. Speed governor There are many ways in many aspects of this system is compared to finalize the technology using PWM motor speed control. This guarantees a certain accuracy of the final speed. In consideration of the efect, speed of liquid crystal display used in this system.KEY WORDS:DC brushless motor,speed control,PWM,PID closed loop control目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 课题依据及意义 (1)1.2 直流无刷电机的发展 (1)1.3 直流无刷电机控制系统的发展现状 (2)1.3.1 转子位置检测及开关状态切换 (2)1.3.2 速度调节 (2)1.4 本课题研究的主要内容 (3)1.5 本章小结 (3)2 直流无刷电机的运行原理 (4)2.1 简介 (4)2.2 直流无刷电机的工作原理 (4)2.3 永磁直流无刷电机特性分析 (5)2.3.1 电机的基本公式介绍 (5)2.3.2 起动特性 (6)2.3.3 机械特性 (6)2.4 位置传感器及位置检测方法 (7)2.5 本系统选用的的位置检测方法 (7)2.6 本章小结 (7)3 直流无刷电机控制系统的硬件设计 (7)3.1 概述 (8)3.2 直流无刷电机调速电路的整体结构 (8)3.3 直流无刷电机的选择 (9)3.4 驱动芯片的选择 (9)3.5 控制芯片的选择和使用 (11)3.6 辅助控制芯片的用法 (12)3.7 电机位置及速度检测电路 (13)3.8 单片机的选用 (13)3.8.1 单片机的选择依据 (13)3.8.2 MC51系列单片机的介绍 (14)3.9 D/A和A/D的选用 (15)3.10 RS-485通讯协议 (16)IV3.11 显示部分 (18)3.12 键盘部分 (18)3.13 整体设计图 (20)3.14 元器件清单及说明 (24)3.15 本章小结 (25)4 直流无刷电机控制系统的软件设计 (26)4.1 整体概述 (26)4.2 看门狗电路的设计 (27)4.3 RS485部分软件设计 (29)4.4 本章小结: (29)致谢 (31)参考文献 (32)附录 (33)直流无刷电机调速系统设计 11 绪论1.1 课题依据及意义直流无刷电机是近几年来小电机行业发展最快的品种之一,随着视听产品小、轻、薄化和家电产品的静音节能化以及豪华型轿车需求量增多,直流无刷电动机需要量迅速增加。