F2812主要功能简介-事件管理器
- 格式:ppt
- 大小:3.78 MB
- 文档页数:109
TMS320F2812芯片介绍1 TMS320F2812芯片的特点 (1)2 F2812内核组成 (4)3 F2812外设介绍 (5)①事件管理器 (6)②模数转换模块 (6)③SPI和SCI通信接口 (6)④CAN总线通信模块 (7)⑤看门狗 (7)⑥通用目的数字量I/O (7)⑦PLL时钟模块 (7)⑧多通道缓冲串口 (7)⑨外部中断接口 (8)⑩JTAG (8)1 TMS320F2812芯片的特点TMS320F2812是TI公司推出的低价钱、高性能的32位定点DSP数字信号处置器,是到目前为止用于数字控制领域性能最好的DSP芯片。
它是在TMS320C28x为内核的基础上扩展了相应的存储器并集成了大量的片内外设而成的新一代适用于工业控制的DSP芯片。
图9为F2812控制器方框图。
图9 F2812控制器方框图TMS320F2812 系统组成包括:150MHz、150MIPS的低电压3.3VCPU、片内存储器、中断管理模块、事件管理器模块、片内集成外围设备。
TMS320F2812的体系结构采用4级流水线技术,加速程序的执行。
32位的CPU 内核提供了壮大的数据处置能力, 最高速度可达150MIPS,能够在单个指令周期内完成32*32位的乘累加运算。
TMS320F2812采用增强的哈佛结构,芯片内部具有6 条32位总线, 程序存储器总线和数据存储器总线彼此独立, 支持并行的程序和操作数寻址, 因此CPU的读/写可在同一周期内进行。
这种高速运算能力使各类复杂控制算法得以实现。
芯片本身具有128KB的Flash,外部RAM 能够按照需要进行扩充。
另外,它还具有高性能的12位模/数转换能力,改良的通信接口和1MB的线性地址空间。
外设模块丰硕且功能壮大,其中包括:事件管理器EV A和EVB,包括16个PWM输出,10个16位比较器和4个通用按时器;快速灵活的12位,16通道ADC,12.5MPS数据吞吐率;及其它丰硕的片内集成外设:2通道的SCI模块、SPI模块、eCAN2.0B模块、McBSP模块等。
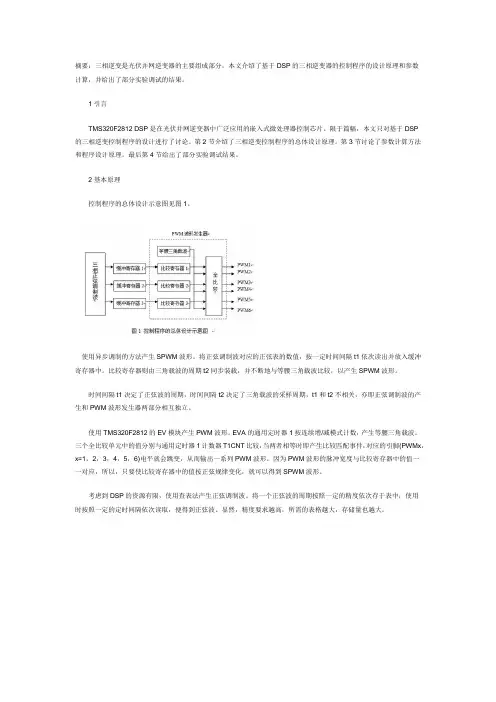
摘要:三相逆变是光伏并网逆变器的主要组成部分。
本文介绍了基于DSP的三相逆变器的控制程序的设计原理和参数计算,并给出了部分实验调试的结果。
1引言TMS320F2812 DSP是在光伏并网逆变器中广泛应用的嵌入式微处理器控制芯片。
限于篇幅,本文只对基于DSP的三相逆变控制程序的设计进行了讨论。
第2节介绍了三相逆变控制程序的总体设计原理。
第3节讨论了参数计算方法和程序设计原理。
最后第4节给出了部分实验调试结果。
2基本原理控制程序的总体设计示意图见图1。
使用异步调制的方法产生SPWM波形。
将正弦调制波对应的正弦表的数值,按一定时间间隔t1依次读出并放入缓冲寄存器中。
比较寄存器则由三角载波的周期t2同步装载,并不断地与等腰三角载波比较,以产生SPWM波形。
时间间隔t1决定了正弦波的周期,时间间隔t2决定了三角载波的采样周期,t1和t2不相关,亦即正弦调制波的产生和PWM波形发生器两部分相互独立。
使用TMS320F2812的EV模块产生PWM波形。
EVA的通用定时器1按连续增/减模式计数,产生等腰三角载波。
三个全比较单元中的值分别与通用定时器1计数器T1CNT比较,当两者相等时即产生比较匹配事件,对应的引脚(PWMx,x=1,2,3,4,5,6)电平就会跳变,从而输出一系列PWM波形。
因为PWM波形的脉冲宽度与比较寄存器中的值一一对应,所以,只要使比较寄存器中的值按正弦规律变化,就可以得到SPWM波形。
考虑到DSP的资源有限,使用查表法产生正弦调制波。
将一个正弦波的周期按照一定的精度依次存于表中;使用时按照一定的定时间隔依次读取,便得到正弦波。
显然,精度要求越高,所需的表格越大,存储量也越大。
一个周期的正弦表的相位是,对应表的长度的1/3。
为了产生三相对称正弦波,将正弦表长度取为3n,n为整数。
当A相从第0个数开始取值时,则B相从第n个数处开始取值,C相从第2n个数处开始取值。
事实上,因为使用了异步调制,所以只要正弦表的长度足够大,不是3的整数倍也不会对输出波形产生太大影响。
第一章 DSP 相关知识及TMS320F2812性能介绍数字信号处理(DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。
在通常的实时信号处理中,它具有可程控、可预见性、精度高、稳定性好、可靠性和可重复性好、易于实现自适应算法、大规模集成等优点,这都是模拟系统所不及的。
1.1 DSP系统构成数字信号处理器是利用计算机或专用处理设备,在模拟信号变换成数字信号以后,以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等高速实时处理的专用处理器,其处理速度比最快的CPU还快10~50倍。
一个典型的DSP系统,输入信号首先进行带限滤波和抽样,然后进行A/D变换将信号变换成数字比特流。
DSP芯片的输入是A/D变换后得到的以抽样形式表示的数字信号,DSP芯片对输入的数字信号进行某种形式的处理,如进行一系列的乘累加操作(MAC)。
最后,经过处理后的数字样值再经D/A变换转换为模拟样值,之后再进行内插和平滑滤波就可得到连续的模拟波形。
必须指出的是,上面给出的DSP系统模型是一个典型模型,但并不是所有的DSP系统都必须具有模型中的所有部件。
1.2 DSP系统的特点数字信号处理系统是以数字信号处理为基础,因此具有数字处理的全部优点:(1)接口和编程方便。
DSP系统与其他以现代数字技术为基础的系统或设备都是相互兼容的,与这样的系统接口以实现某种功能要比模拟系统与这些系统接口容易得多;另外,DSP系统中的可编程DSP芯片可使设计人员在开发过程中灵活方便地对软件进行修改和升级。
(2)稳定性和可重复性好。
DSP系统以数字处理为基础,受环境温度、湿度、噪声、电磁场的干扰和影响较小,可靠性高;数字系统的性能基本不受元器件参数性能变化的影响,因此数字系统便于测试、调试和大规模生产。
(3)精度高。
16位数字系统可以达到10-5的精度。
(4)特殊应用。
有些应用只有数字系统才能实现,例如信息无失真压缩、V 型滤波器、线性相位滤波器等等。
第一章 DSP 相关知识及TMS320F2812性能介绍数字信号处理(DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。
在通常的实时信号处理中,它具有可程控、可预见性、精度高、稳定性好、可靠性和可重复性好、易于实现自适应算法、大规模集成等优点,这都是模拟系统所不及的。
1.1 DSP系统构成数字信号处理器是利用计算机或专用处理设备,在模拟信号变换成数字信号以后,以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等高速实时处理的专用处理器,其处理速度比最快的CPU还快10~50倍。
一个典型的DSP系统,输入信号首先进行带限滤波和抽样,然后进行A/D变换将信号变换成数字比特流。
DSP芯片的输入是A/D变换后得到的以抽样形式表示的数字信号,DSP芯片对输入的数字信号进行某种形式的处理,如进行一系列的乘累加操作(MAC)。
最后,经过处理后的数字样值再经D/A变换转换为模拟样值,之后再进行内插和平滑滤波就可得到连续的模拟波形。
必须指出的是,上面给出的DSP系统模型是一个典型模型,但并不是所有的DSP系统都必须具有模型中的所有部件。
1.2 DSP系统的特点数字信号处理系统是以数字信号处理为基础,因此具有数字处理的全部优点:(1)接口和编程方便。
DSP系统与其他以现代数字技术为基础的系统或设备都是相互兼容的,与这样的系统接口以实现某种功能要比模拟系统与这些系统接口容易得多;另外,DSP系统中的可编程DSP芯片可使设计人员在开发过程中灵活方便地对软件进行修改和升级。
(2)稳定性和可重复性好。
DSP系统以数字处理为基础,受环境温度、湿度、噪声、电磁场的干扰和影响较小,可靠性高;数字系统的性能基本不受元器件参数性能变化的影响,因此数字系统便于测试、调试和大规模生产。
(3)精度高。
16位数字系统可以达到10-5的精度。
(4)特殊应用。
有些应用只有数字系统才能实现,例如信息无失真压缩、V 型滤波器、线性相位滤波器等等。

TMS320F2812处理器特性1.高性能静态CMOS(Static CMOS)技术●150MHz(时钟周期6.67ns)●低功耗(核心电压1.8V,I/O口电压3.3V)●Flash编程电压3.3V2.JTAG边界扫描(Boundary Scan)支持3.高性能的32位中央处理器(TMS320C28x)●16位*16位和32位*32位乘且累加操作●16位*16位的两个乘且累加●哈佛总线结构●强大的操作能力●快速的中断响应和处理●统一的寄存器编码模式●可达4兆字的线性程序地址●可达4兆字的数据地址●代码高效(用C/C++或汇编语言)●与TMS320F24/LF240x处理器的源代码兼容4.片内存储器●128K*16位的Flash存储器●1K*16位的OTP型只读存储器●L0和L1:两块4K**16位的单口随机存储器(SARAM)●H0:一块8K*16位的单口随机存储器●M0和M1:两块1K**16位的单口随机存储器5.引导存储器(Boot ROM)4K*16位●带有软件的Boot模式●标准数学表6.外部存储器接口(部分型号拥有,且标准不一)●最多1MB的存储器●可编程等待状态数●可编程读/写选通计数器(Strobe Timing)●三个独立的片选7.时钟与系统控制●支持动态的改变锁相环的频率●片内振荡器●看门狗定时器模块8.三个外部中断9.外部中断扩展(PIE)模块。
可支持96个外部中断,2812仅使用了45个外部中断。
10.128位的密匙(Security Key/Lock)●保护Flash/OTP和L0/L1 SARAM●防止ROM中的程序被盗11.3个32位的CPU定时器●12.马达控制外围设备●两个事件管理器(EVA、EVB)●与C240兼容的器件●13.串口外围设备●串行外围接口(SPI)●两个串行通信接口(SCIs),标准UART●增强型局域网络(eCAN)●多通道缓冲串行接口(McBSP)14.12位ADC,16通道●2*8通道的输入多路选择器●两个采样保持器●单一/同步转换●最快转换时间:80ns/12.5MSPS15.最多有56个独立的可编程、多用途通用输入/输出(GPIO)引脚16.高级的仿真特性●分析和设置断点的功能●实时的硬件调试17.开发工具●ANSI C/C++编译器/汇编程序/连接器●支持TMS320C24x/240x的指令●CCS集成开发环境●DSP/BIOS●JTAG扫描控制器(TI或第三方提供)●硬件评估板18.低功耗模式和节能模式●支持空闲模式、等待模式、挂起模式●停止单个外围的时钟19.封装方式●带外部存储器接口的179球型触点BGA封装●带外部存储器接口的176引脚低剖面四芯线扁平LQFP封装●没有外部存储器接口的128引脚贴片正方扁平PBK封装。
4 TMS320F2812芯片及其控制策略4.1 TMS320F2812DSP芯片介绍(要来一个专业点的介绍)数字信号处理器(Digital Signal Prcessor),是一种特别适合于进行数字信号处理运算的微处理器。
当今,随着数字化控制算法的快速发展,尤其在自动控制领域,DSP的高速计算能力显示了比一般微处理器更多的优点,具有广阔的应用前景。
利用DSP的高速计算能力可以增加采样速度和完成复杂的信号处理和控制算法,Kalman滤波、自适应控制矢量控制、状态观测器等复杂算法利用 DSP 芯片可以方便地实现。
DSP的信号处理能力还可用来减少位置、速度、磁通等传感器,无传感器运行之所以成为可能。
在现代电机控制系统中,系统参数和状态变量通过状态观测器的计算可采用DSP有效地实现。
同样,由于高运算速度,使得DSP也可有效地用于实际工程应用中,DSP的高速能力还可以消除噪声污染和不精确的输入及反馈信号数据,对要求速度响应快而准的现代电机调速系统,DSP 凭借其强大的运算和处理能力,能较快地实现PWM控制算法,如空间矢量脉宽调制(SVPWM)算法。
综合可知,现代DSP一般具有如下一些特点:(1)在一个指令周期内可完成一次乘法和一次加法;(2)程序和数据空间分离,可以同时访问指令和数据;(3)片内具有快速 RAM,通常可通过独立的数据总线在两块中同时访问;(4)具有低开销或大开销循环及跳转的硬件支持;(5)具有在单周期内操作的多个硬件地址产生器,可以并行执行多个操作;(6)支持流水线操作,使取值、译码和执行等操作可以重叠执行。
本设计采用了数字化矢量控制,在数字化控制算法中,系统选用了TI公司的TMS320F2812 DSP控制器作为主控芯片,它功能强大,运行速度快,是专门为电动机控制应用优化的控制芯片,在本设计中,它主要完成各种模拟、数字信号的采样及转换,高速精准处理各种数字信号并完成各种诸如PI调节器的控制算法,产生电压SVPWM驱动信号,完成交-直-交变频速度调控的功率驱动,与外设通信完成数据交流并检验各类软硬件故障,运行相应的中断程序等等。
目录一、如何开始DSP的学习 (2)二、完整工程的构成 (4)三、CCS的操作 (7)1、CCS的布局和结构 (7)2、开始调试程序 (8)3、统计代码运行时间 (10)四、F2812的资源 (15)1、F2812的片内资源 (16)2、地址总线和数据总线 (16)3、内部的存储器资源 (18)4、存储器映射 (18)5、映射和空间的统一编址 (20)6、2812CMD详解 (21)五、中断系统 (25)1、F2812的中断系统 (25)2、2812中断程序模板 (29)六、F2812的时钟系统 (32)1、振荡器OSC和锁相环PLL (32)2、2812芯片中各种时钟信号的产生情况 (33)3、看门狗(Watch Dog) (34)4、系统初始化函数 (34)七、IO口控制 (37)八、F2812的EV模块 (39)1、事件管理器的功能 (39)2、通用定时器 (40)3、通用定时器初始化程序 (43)九、F2812的PWM (46)1、通用定时器产生的PWM波 (46)2、三相全桥电路桥理想驱动波形 (49)十、F2812的SCI模块 (53)1、2812 SCI模块 (54)2、SCI模块的特点 (55)3、SCI模块发送和接收数据的工作原理 (55)4、SCI数据格式 (56)5、SCI通信波特率设置 (56)6、SCI发送和接收数据的机制 (57)7、多处理器通信 (58)一、如何开始DSP的学习以下为各网友学习DSP的一些经验fxw451:大家先大体上看一遍书,把大体的知识了解一下。
其次就是看例子了,例子是关键,例子里有你学的所有的东西,这次你再拿出一本书来看,这次是有针对性的看,比如你做的spi的,你就直接看sp i那张,一边看例子一边看书,这样你就可以把一些重要的寄存器给记住了。
对于初学者来说,一直好奇的就是ccs的使用,拿我第一次使用ccs来说,当我把ccs和板子连载一起时,我相当高兴,成功感油然升起,接下来就是用ccs里的看自带的例子了,看完后你就会发现,这些是什么东东哦,什么都不会,这就对了,你要是看一开始看会了你就是神仙了,dsp不像单片机那么容易上手,所以你要花费点功夫吃透它,好东西不是那么容易就可以搞定的。
第7课F2812的EV模块作者:顾卫钢由于2812主要应用于工业控制场合,例如电机控制、变频器,逆变器等等,所以2812的事件管理器模块(EV)可谓是重点部分了,由于EV的内容非常丰富,我们在讲义中不能面面俱到,所以希望大家在学习的时候能将手头的书本和我们的讲义结合起来学习,应该效果会更好。
我们在今天的课程中将为大家重点介绍EV模块中的定时器及其PWM电路,希望通过这节课的学习,大家能够熟练使用EV来产生自己所需要的PWM波形。
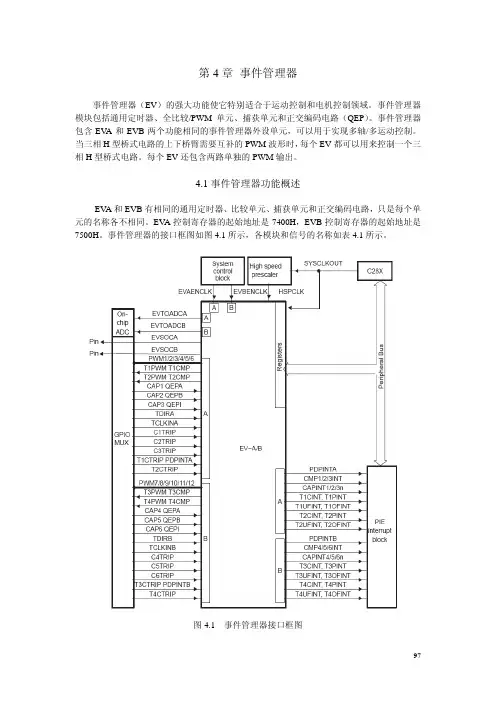
1.事件管理器的功能2812具有两个事件管理器模块EVA和EVB,这两个EV模块就像孪生兄弟一样,具有相同的功能,例如它们的定时器、比较单元、捕捉单元的功能都是完全一样的,只是各个单元的名称因为EVA和EVB有所区别而已,我们在下面的分析中主要以EVA为例。
简单来讲的话,每个EV模块都具有2个通用定时器、3个比较单元、3个捕获单元以及1个正交编码电路,我们重点来讲定时器和比较单元部分的内容。
EVA和EVB的资源详见上面的表格所示,表格中蓝色的字表示该信号是低电平有效。
通用定时器就像秒表一样,是可以用来计时的,而且每个定时器还能产生1路独立的PWM波形;比较单元主要功能就是用来生成PWM波形的,EVA具有3个比较单元,每个单元可以生成一对(两路)互补的PWM波形,生成的6路PWM波形正好可以驱动一个三相桥电路。
捕获单元的功能是捕捉外部输入脉冲波形的上升沿或者下降沿,可以统计脉冲的间隔,也可以统计脉冲的个数。
正交编码电路的话应该用的比较少,它可以对输入的正交脉冲进行编码和计数,它和光电编码器相连可以获得旋转机械部件的位置和速率等信息。
细心的同学可能会发现,为什么“External compare-output trip inputs”、“External timer-compare trip inputs”、“External trip inputs”用的是英文,其他都翻译成中文了呢?原因是书上翻译的太差了,特别是我们推荐的教材《TMS320C28X系列DSP的CPU与外设》中将其分别翻译成了“外部比较-输出行程输入”“外部定时器_比较行程输入”“外部行程输入”,让人看了有些丈二和尚摸不着头脑的感觉,不知道讲的是什么,这几个信号究竟是干嘛用的更是不清楚了,因此,在这里还是向大家介绍原汁原味的英文名称。