行星齿轮减速器优化设计
- 格式:pptx
- 大小:1.10 MB
- 文档页数:24

行星减速器的优化设计机械最优化设计,就是在给定的载荷或环境条件下,在对机械产品的性态、几何尺寸关系或其他因素的限制(约束) 范围内,选取设计变量,建立目标函数并使其获得最优值的一种新的设计方法。
设计变量、目标函数和约束条件这三者在设计空间(以设计变量为坐标轴组成的实空间) 的几何表示中构成设计问题。
任何一个最优化问题均可归结为如下的描述,即:在满足给定的约束条件(决定n 维空间En 中的可行域D) 下,选取适当的设计变量X ,使其目标函数f ( X) 达到最优值。
其数学表达式(数学模型) 为:设计变量X = [ x 1 x 2 ⋯x n ] T , X ∈D < En 在满足约束条件等式约束hv ( X ) = 0 , v =1 ,2 , ⋯, p 和不等式约束gu ( X ) ≤0 , u = 1 ,2 , ⋯, m 的条件下,求目标函数f ( X ) =∑=qj jj X fw 1)(的最优值, wj 为第j 项指标的加权因子, f j ( X) 为第j 项指标的目标函数。
现以常用的2K-H 型行星减速器的齿轮机构的最优化设计为例,介绍如下。
1 目标函数的建立对于行星轮传动,当给定了功率、转速和传动比,各个参数(如传动比的分配、各齿轮的齿数、模数、齿宽、内外啮合角、行星轮个数以及螺旋角等) 的组合是多解的,但这些参数一经选定,最直接得到的综合反映是其结构尺寸的大小,因此,可选用体积最小作为本程序的目标函数。
对于非变位的单斜齿,其目标函数形式为V (ββπcos 2222)(4z nz m g pa n +式中: m n 为模数,mm ;β为螺旋角。
该式是对单级行星齿轮传动而论的,对于三级行星齿轮传动,则可写成如下形式:V min =V ( x 1) + V ( x 2) + V ( x 3)约束方程:(1) 配齿条件装配条件为 n z z pb a += 正整数同心条件为 '-='+ααgbg aaggaz zzzcos cos 式中:'αag 为太阳轮- 行星轮副啮合角;'αgb 为行星轮- 内齿圈副啮合角。

行星齿轮减速器的优化设计作者:赵明侠来源:《硅谷》2011年第19期摘要:根据可靠性设计理论和机械优化设计技术,以NGW型行星齿轮减速器为例,初步探讨优化设计的原理和方法。
关键词:行星齿轮减速器;优化设计;优化设计方法中图分类号:TH132 文献标识码:A 文章编号:1671-7597(2011)1010074-02减速器是机械行业中十分重要的传动装置,传统的减速器设计通常需要有经验的人员选取适当的参数,进行反复的试凑、校核确定设计方案,但也不一定是最佳设计方案,而优化设计的方法则通过设计变量的选取、目标函数和约束条件的确定,建立数学模型,通过求解得到满足条件的最佳解,同时缩短设计周期。
为了合理分配行星轮系的总传动比,并使系统体积小、质量轻,建立了具有3个设计变量、1个目标函数和几个约束方程的优化设计数学模型,并用MATLAB优化工具箱进行求解。
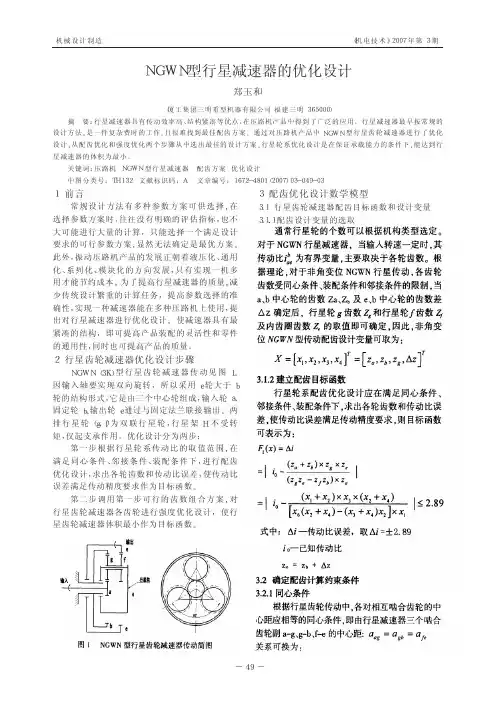
2K-H(NGW)型行星齿轮减速器的优化设计:1-中心轮 2-行星轮 3-壳体图1为NGW型行星轮系机构简图。
已知:作用于中心轮的转矩T1=1140N·m,传动比u =4.64,齿轮材料均为38SiMnMo,表面淬火45-55HRC,行星轮个数c=2,要求以重量最轻为目标,对其进行优化设计。
1 目标函数和设计变量的确定行星齿轮减速器的重量可取太阳轮和c个行星轮重量之和来代替,因此目标函数可简化为:式中:z1-中心轮1的齿数;m-模数,单位为(mm);b-齿宽,单位为(mm);c-行星轮的个数;u-轮系的传动比4.64。
影响目标函数的独立参数应列为设计变量,即在通常情况下,行星轮个数可以根据机构类型事先选定,这样,设计变量为:2 约束条件的建立1)小齿轮z1不根切,得:2)限制齿宽最小值,得:3)限制模数最小值,得:4)限制齿宽系数b/m的范围:,得:5)满足接触强度要求,得:式中: -许用接触应力。
6)满足弯曲强度要求,得:式中:、 -齿轮的齿形系数和应力校正系数; -许用弯曲应力。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊轮边行星齿轮减速器三维设计及优化摘要随着国家重点基础工程建设的不断推进,工程机械越来越多地出现在人们的视野中,而集高效率与高度自动化于一身的大型工程机械更是得到了快速的发展,作为工程机械动力与控制信息传递的重要一环,轮边减速器有着十分重要的作用,它与液压马达组成车轮动力装置,将液压油路的能量及控制信息完整地表现在车轮上,相比以往的驱动桥和中央传动更为简便、更利于实现自动化。
本设计在已有成熟产品的基础上,根据已有的工作要求与其他限定条件,通过各级传动比试配法、传动计算、齿轮校核、结构设计等方法得到设计参数并据此进行三维建模,利用软件进行三维数字化设计以及仿真,并对关键部件可做有限元分析,从而获取最佳的设计方案。
关键词:轮边减速器,行星传动,三维设计,试配法,仿真,优化,传动比分配┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊The Three-dimensional Designing and optimization of thehub planetary gear reductionAbstractWith the advancing of national important basic construction projects these years, there are more and more construction machinery appear in our daily life and the large-scaled construction machineries are high-speed developing as result of the high efficiency and high automatic. As an important role in the chain of power and control information transmission, it has a unique function to form the power equipment for the wheel and transmit the energy and control information to the wheels, it is more convenient and automatic by comparison with the driving bridge and central transmission.This design is based on the already known products and the precondition of the working need and other limiting conditions. The first part of this article is try-and-match, then calculates the transmission ratio and the intensity and structure of gears, then build the three-dimensional designing model, in motion and finite element model analysis, lastly we get the optimal design.Key words: hub reduction, planetary gears, three-dimensional designing, try-and-match, emulation, optimization, distribute of transmission ratio.┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录1 前言 (1)1.1 课题背景 (1)1.2 国内外相关产品 (1)1.3设计内容 (2)2 设计计算 (4)2.1 已知条件 (4)2.2 拟定传动方案 (5)2.3 传动比分配与计算 (8)2.4 高速级计算 (11)2.5 中间级计算 (20)2.6 低速级计算 (22)2.7 啮合效率计算 (24)2.8 行星架结构设计与计算。

第16卷 第1期茂名学院学报Vol.16 No.1 2006年2月JOURNA L OF M AOMI NG C O LLEGE February.2006文章编号:1671-6590(2006)01-0021-03行星齿轮减速器的最优化设计莫才颂1,王岗罡2Ξ(1.茂名学院机电工程学院,广东茂名525000;2.中国人民解放军驻211厂军事代表室,北京100076)摘 要: 介绍了行星齿轮减速器单目标优化问题数学模型的建立。
在以体积为最小的基础上,以优化模数、齿数、齿宽为主要目标的单目标函数,并用内点惩罚函数法进行寻优,进行迭代得到最优解。
通过对具体实例进行分析,结果表明该方法经济可靠,是一种具有工程实用价值的设计方法。
关键词: 行星齿轮;减速器;优化设计中图分类号:TH112 文献标识码:A 行星齿轮减速器具有传动比大、传动效率高、结构紧凑等优点,广泛用于小轿车、重型载重汽车、军用车辆、工程车辆和飞机等机械设备的传动系统中。
其设计是一项较复杂的工作,而且以常规设计方法只能找出可行方案。
因此,按最小体积为目标对行星齿轮减速器进行最优化设计,不仅对缩小体积,而且对减小质量、节约材料及降低成本等都是很有实效的,这些对汽车、飞机这样一类产品尤其重要。
现以这类产品中常采用的2K-H型行星机构为例,运用优化设计理论,对行星齿轮减速器的设计进行探讨。
1 优化设计数学模型的建立1.1 确定设计变量2K-H型行星机构的简图[1]如图1所示。
当行星轮个数C确定之后,齿轮的主要参数有齿轮分度圆直径和齿轮宽度,而分度圆直径由各齿轮的模数和齿数确定。
因此,设计变量可定为齿数z,1模数m,齿宽b,即设计变量X=[z,b,m]=[x1,x2,x3]11.2 建立目标函数由于太阳轮和全部行星轮的体积之和能影响和决定齿圈或整个机构的尺寸和体积,因此选择这项指标作为最优化设计的目标函数[2],即F(X)=V a+C V g=πb(D a2+C D g2)Π4=πm2b(Z a2+CZ g2)Π4式中,Va,Da,Z a分别为太阳轮的体积,节圆直径,齿数;Vg,Dg,Z g分别为行星轮的体积,节圆直径,齿数;CΞ收稿日期:2005-11-13;修回日期:2005-11-25 作者简介:莫才颂(1973-),男,广东茂名人,硕士,讲师.为行星齿轮个数;m 为齿轮模数;b 为齿轮齿宽。
双级行星齿轮减速器的优化设计机械零部件设计g机械设计1989Tr{I—7{,双级行星齿轮减速器的j尤化设计唐增宝-中理学:目前.NGw型积级行星齿轮减速器的优化设计,一般都是先按等强度原则分配各级传动比,然后进行单级行星机构的优化设计,这种设计的厦量.首先决定于各级传动比分配的合理与否,但这种等强度分配传动比.事实上达不到等强度,因按此法分配传动比时,先要假设第一,二级齿轮强度计算中的诸系数t如,K—ZH,z,z,……等)和许用应力等的}七值,这些比值假设不同,得到的各级传动比也就不同,因此传动比分配的台理与否,决定于诸系数之比值假定得正确与否因齿轮尚未设计,这些系数就不可能假设得正确.本文双级行星齿轮机构作为整体进行优化设计.传动比不是先分配,而是在整机双级齿轮中进行优化得到的,各级齿轮参数也是由整机优化得到的.同时.外啮合和内啮合齿轮均采用角度变位.使内外啮合接触强度相等,且提高了外啮合齿轮的承载能力一因此优化的结果,可使各级齿轮参数更为合理.本院化设计中,考虑了行星齿轮安装的滚动轴承,程序自动选择满足要求的滚动轴承.这样可使优化设计结果满足行星齿轮结构设计的要求.传动简图如图l所示.二,优化数学模型罔1积鞭行星减速器传动简用'1.设计壹董确定双级行星齿轮减速器齿轮的参数有各齿轮的齿数,模数,齿宽,变位系数和单级传动比等,为了便于在几何计算之前进行配齿,配出的齿轮能使外啮合角和内啮合角在台理的范围内,达到内外啮合等强度的目的,则选用下参数作为设计变量:ZZth,BI,X_],I,il,ZI2,m2,B2,xt,盯2j式中:zZ分别为第一,二级太阳轮齿数;int,rl'l别为第一,二级齿轮模敬:B,B.分别为第一,二级齿宽:xx..分别为第一,二级太阳轮变位系数系数:.-一一.j甥Ⅱ为第一,=级齿轮外啮台角;i1为第一级传动比.2.目标函数为了减轻减速器重量和体积.降低产品成本,采用l舣级行星机构各齿轮体积之和作为目标函数.F=4[Blf也t{+T1Pda}dm卜也口+t32f也fT1P出!+dj一出口i)]'《机械设计"1989№05机槭零部件设计23式中:各量的下标l,2分别表示第—和一Z05)tg0+Z0jtg第二级的参数,t,x和Q分别表示太阳轮,tg‰,一{蜀—zx)z≥行星轮和内齿圈的参数,a表示顶圆,f表zxtg"4(一)sin2示根圆,(下同),nP表示行星轮个数.式中:zo为加工内齿轮的插刀齿数I 3.约束函数o为加工内齿轮时插刀齿顶压力'(1),边界约束角;,,z≤z≤zlo约加工内齿轮时合角.xm≤X,≤xmaxli=12'8),加工内齿轮时不产生范成顶切mmi.≤mj≤axL(下同)的限制.B_n≤B≤BnalZ021/z≥l—tg口/tga'o~i20≤≤27.『(9),结构限制条件iln≤i1≤iJl—dmddfQ0(2),齿轮宽径比的约束条件dfQ~/dfQ1一1.3≤0Bid【】一1.3≤0(dfro+6111j)/dL一1(J0.35一B/d,≤0dfpidt【i一10(3),齿轮强度约束穿牛-D一一(d…一2.5m,)『l接触强度安全系数:式中:dfQndfq2分别为第一J==二级齿圈SH—S≤o根圆直径S…一S≤od为允许的齿圈最大外径}SH一S≤odt为太阳轮允许最小根圆直径}弯曲强度安全系数:SmIn—S0为滚动轴承外径.SFi一SFx≤0SmIn—Sm,《0(i0),配齿条件:2012≤0传动比耍:一㈩1.一x【≤.一El≤l训小'一Z【l'(5),齿顶厚的约束条件..0.25一S.}./≤0装配条件:亩=堕=整数(2)0.25一S㈣≤0(6),内啮合角的约束条件为了使内外啮合齿轮接触强度相等,提l7.≤<23.5.高外啮合齿轮承载能力,内外啮合齿轮均采(7),过渡曲线干涉条件用角度变位传动,则同心条件为:外啮合齿轮副不发生过渡曲线干涉条件:tg1;Z}/z刈(tg毛,一tg1i)≥tg一4(一xx.)/(Z.sin22)tg一Z/zll(gxi—tgI)≥tg4(Il】'|c)/(Z¨n2)内啮合齿轮副不发生干涉条件:Zx,tg(zq一Zj)tg;二Z0121:Z0L—ZxL若np:3.考虑.'3)Z【1+Zx1则相邻条件能满足,故可不三,配齿计算配齿计算在行星机构优化设计中是个关24机械零部件设计《机械设计1989№05键问题,一般将公式f1~(3)作为等式约束简单处理是很难达到目的的,往往会.,产生优化不出结果的现象如前所述,为了能使外啮合和内啮合齿轮等强度,内外啮合'均应采用角度变位,并使外啮合角在23.~26.5.范围内,内啮合角在2O.左右.为了使配出的齿轮参数(齿数和变位系数】能满足上述要求,则配齿计算可按下述方法进行因z,Xti和为设计变量,给出了它们自田值,则就可由公式①算出z..并圆整为z.,对于n=3的行星机构来说,能满足装配条件的z可能有Z.2,Z3?, z.,za+,z,其中有两个值能满足装配条件.对于每一个,考虑行星齿轮的角度变位,有可琵采取的行星齿轮齿数就存在三种可能:Z_IFIX(Zq—Zt)/2Z(2JZ(1)一l(4).厶【3=厶lj2这样内齿轮齿数zq存在两种可能,行星轮齿数就存在六种可能,那未选择哪一组齿数为好呢?则根据上述内外啮合角的要求来选择一组台适的齿数和变位系数,其程序框图如图2所示.四,优化程序结构本优化设计程序由一个主程序和优化方法,配齿计算,几何计算,强度计算,目标函数和约束函数等21个子程序组成,其程序流程图如图3所示.图中K.为程序功能控制变量,KS=l为优化设计,KS=2为一般设计,KS=3只进行强度校核.本程序采用先进的约束拟牛顿法进行优化,这种方法是一种求解约束优化问题的直接解法.一方面将约束问题转化为一系列二次规划的子问题,并以每个子问韪钓解作为『e:z,.m?一I.J{害,由f计耳.z(J.K),fJl叫匠鞫臣曲』耍≤图2配齿计算程亭框图图3行星齿轮减i}器慌忙设计流程图●r■lf.f机械设计1989№05机械零部件设计25该谈线性搜索的方向,同时利尉线性搜索的五,设计实例和结果分析监控策略来确定该次迭代的步长日子,从而实现一次迭代运葬.另一方面,它在构造每一个二次飙划子问题时,采用与无约束变尺度法相似的Hessen矩阵逆阵的近靓矩阵的递推格式.这样使函数求值次数少,计算效率高,整体收敛快和可靠性高.设计变量辛的模数等在忧化时作连续变量处理,优化后采用整型点圆整法"进行圆整.,1-●,设计煤矿运输机用的NGV级行星齿轮减速器.已知输入功率Pl=127kW,输人转速nl=1000r.P.Ⅱl'总传动比为28,载荷中等冲击,电动机为原动机,太阳轮和行星轮的材料为180;MnTi,渗碳淬火,HRCA8~62,内齿圈材料为40Cr.词质处理,HB260~280,齿轮寿命为10O00小时,齿轮精度为7级优化计算结果列于表l.'.表1,齿轮主要参数毒教值●ZL】Zx】ZLlXJX0JZt:Z2Z02XI2Xx2X0/原设计19S2860.500.7120.40124.5203082●0.5700.564O.5647.0忧亿_i壁计1934曲0.85l50.79l7I'屿0"0223186O.鹎10.561O.9o36.0_齿轮主要尺寸目标函数参徼值,dl】dxLd0】dmJb】dl±dx2d0£fdfbFc呻.)原设计85.50144.O0387.O04tl2.217,60.O0l201们.21仉n574.0599.7965l0.0tSZ204110J优化设计76n0136.00撕6.00047.931lIl32?训l86.O516.O乱1.821la5.2t6717lx10' _接触强度安垒系数弯曲强度安垒系敬-参教值_tS¨llSHlSHISHl2.S¨2SH02SFcISIL?S…SFt:SrxS川2l原设计l_469J_4691.1851.2591.2591口674.4223.0532.8063.1892.1922.456●,-纯化设计'h203l.283i.1401.228i.船81.1242.9322.O262.3le2.93fii.8622.553 '从表l计算结果可知,优化设计结果.使齿轮参数比原设计更为台理,达到第一级与第二级齿轮等强度,内外啮合的接触强度也为等强度,各齿轮尺寸比原设计小,两级齿轮体积之和比原设计减,J,l,3.22%.(下转33页)垫遮丝盐兰盥盟..,塑壁壁!堕燮——.c==s.I×ly_j=而1929丽090×了180Idf.●OuulJ'N.mi11/rad)一2.计算联轴器的变形角联轴器输人功率150KW,在低速1485r,~nin时,所承受最大扭矩:T:0549.(N?叫1式中:N一输入功率(kw);T一扭矩(N?mmj,n一每分钟转数min)将已知:NelS0.kW.n=1485r.min代人上式:T=964545rN?mm根据设备在启动时动载荷和可能出现的过载情况,联轴器的计算扭矩为:=T'(N?一)其中:K一工作情况系数.对于.起动睫量不太而受冲击载菏的设备,=1.5—2.5.现取=2.0.=T=2.0x964545=1929090(N.m,联轴器在T作用下,其变形角I按扭转刚度的定义,则=争×.=×=U—l03.与国内弹性圄柱销联轴器的计算午tI比较按照嵌人式弹性联轴器的D=lT0am尺寸,它相当于弹性圈柱销联轴器(JB108一fj0)标准中的B型,其主要参数为:m=10DI=170,d=36m~,L=45m~,=6Nm{由于橡胶圈为空心,其钢柱销直径d=18v,a, 受挤压力橡胶厚度为:(d—d)/2=9假}.1.25..从以上两种联轴器的扭转刚度比较.嵌人式只有弹性圈柱销型的1/7弱.因此.在承受相同扭转力矩时,前者较后者的变形角增大7倍多.同时,由于橡胶柱的缓冲减振作,用,在承受正反转冲击载荷时,充分显示出优越性所在.并且结构简单,加工容易,维修简便,是一种较先进的弹性联轴器参考文献,1.西l』£工大教研组:机槭设计,上.下il册,人民教育出版社.2.r苏Jll-H?到台托先:机械零什,r上.F-册高等教育出咂社.(魏力)参考文献,I.华大年辞主编:机械丹析与设计,纺织工业出版杜19858.天津_^学主编:机械原理,凡民教育出版柱,19793.黄锡恺薛主编:【槭原,人民救育出舨社,1981(魏力)(上接25页参考文献t.渐开线矧{L由轮堆载麓;fJ计算靠法.GB34811.一838.机锻上程手册编}委员含编【槭工手册第l2藉齿轮传动.机械工业出版畦1980,定同样受rr曲作用,则代入有关算式:'.B-Ii岸持略l^幂夫西:江耕『屯洋.由轮减速器的结c:78030000{N?nlmrad构与汁韩?t海科技出版社.1982'4?陈直周菩编:机槭优化设计,上海科学技术出版牡L987.。
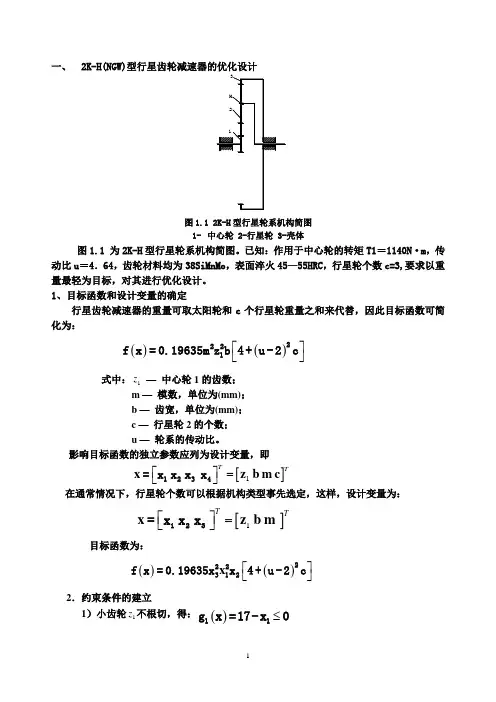
图1.1 为2K-H 型行星轮系机构简图。
已知:作用于中心轮的转矩T1=1140N ·m ,传动比u =4.64,齿轮材料均为38SiMnMo ,表面淬火45—55HRC ,行星轮个数c=3,要求以重量最轻为目标,对其进行优化设计。
1、目标函数和设计变量的确定行星齿轮减速器的重量可取太阳轮和c 个行星轮重量之和来代替,因此目标函数可简化为:()()⎡⎤⎣⎦2221f x =0.19635m z b 4+u -2c式中:1z — 中心轮1的齿数;m — 模数,单位为(mm); b — 齿宽,单位为(mm); c — 行星轮2的个数; u — 轮系的传动比。
影响目标函数的独立参数应列为设计变量,即[]1TT⎡⎤=⎣⎦x z b m c 1234=x x x x在通常情况下,行星轮个数可以根据机构类型事先选定,这样,设计变量为:[]1TT⎡⎤=⎣⎦x z b m123=x x x目标函数为:()()⎡⎤⎣⎦x 222312f x =0.19635x x 4+u -2c 2.约束条件的建立1)小齿轮1z 不根切,得:()≤11gx =17-x 02)限制齿宽最小值,得:()≤22g x =10-x 03)限制模数最小值,得:()-≤33gx =2x 04)限制齿宽系数b/m 的范围:≤≤5b/m 17,得:()-≤432g x =5x x 0()17-≤523g x =x x 05)满足接触强度要求,得:()[]H σ-≤61g x =750937.3/(x x 0式中:[]Hσ — 许用接触应力。
6)满足弯曲强度要求,得:())[]F σ-≤27F S 123g x =1482000y y /(x x x 0式中:Fy 、Sy — 齿轮的齿形系数和应力校正系数;[]F σ — 许用弯曲应力。
,案。
1.目标函数和设计变量在大批量生产压力容器时,以螺栓总成本最小作为追求的设计目标很有意义,一台压力容器的螺栓总成本W n 取决于螺栓的个数n 和单价W ,即W n =n WW=0.0205d-0.1518 于是,可对这种螺栓组写出如下目标函数f(x)=n(0.0205d-0.1518)显然,可取设计变量为X=[x1,x2]T=[d,n]T则目标函数f(x)= x2 (0.0205 x1-0.1518)2.约束函数设计压力容器螺栓组时,螺栓数量的确定既要考虑密封性要求,又要兼顾装拆工具的工作空间。
第一部分:减速器历史发展介绍减速器技术的发展始于20世纪70年代,成熟于20世纪80年代。
在减速器发展初期,产品以高可靠性,高速化,低噪声和小型化为目标,开发出一系列技术:功率分支技术、硬齿面技术、模块化设计技术等等。
在80年代,各项技术在国外都逐渐成熟,硬齿面技术使得硬齿面齿轮的综合承载能力达到普通齿轮的3~5倍,精度不低于6级,且重量有所减轻,传动噪声低等目标也得到较好的实现。
功率分支技术主要应用于行星齿轮减速器中,该技术的核心是均载。
在通用的减速器中,普遍采用的技术主要是硬齿面技术和模块化技术。
模块化技术主要是针对规模效益而制定的,在保证高性能的前提下,减少零件的种类,从而达到批量生产的目的。
在基本规格的零件种类上可以进行变型设计,从通用的系列中派生出一些专用系列,扩大使用范围。
减速器发展的促进因素主要有:齿轮材料和热处理技术的水平提高、箱体的刚度和加工精度提高、结构设计合理、轴承的寿命和质量的提高、理论知识完善、润滑油的质量提高等等。
在国内,改革开放后,积极汲取国外的先进技术并引进加工设备,使得我国在齿轮加工方面有了大幅度的进步,得到了高精度,高速并可用于大功率装置的齿轮,这为我国的减速器的发展打下了坚实的基础。
自20世纪80年代末开始,我国在减速器方面大幅度发展,完成了许多减速器标准的制定,并同时自主研制了许多新型的减速器,直到20世纪90年代中后期,我国基本上实现了通用减速器的革新。
硬齿面技术也逐渐应用于部分减速器,使得减速器的体积和质量有明显的减小,在可靠性、使用寿命等各项性能方面都有了大幅度的提高,使得主机的水平也有所提高,对机械行业起了促进发展的作用。
在20世纪90年代中后期,国外在减速器方面有有所创新,在模块化的基础上,实现了在外观质量、承载能力、总体水平各方面的提高。
我国在应对技术差距时,采用了以下对策:1.国内的高新技术产业应向国际最先进的水平看齐,尽快研发适应21世纪的新时代产品,完成技术上的突破2.在新齿形和新结构的研发、推广上发力,争取研制出成本较低,承载能力又好的产品3.大力发展行星齿轮减速器技术4.控制好减速器的质量问题,在材料热处理,装配试验等各加工环节入手,提高现有产品质量5.在外观设计和涂漆水平上进行提高6.在配套装置的质量上进行加强第二部分:减速器现状介绍国外减速器发展现状:在新技术革命的促进下,国外的减速器技术在20世纪70-80年代的得到了大幅度的发展,目前主要丹麦、德国和日本的减速器处于领先,其减速器在制造工艺和材料方面有很大的优势。
一、引言11背景1.2研究目的二、分析方法2.1MAT1AB模型的建立2.2传动准则的重新定义2.3动力学性能的优化三、基于参数化设计的数值分析3.1机械参数和性能分析3.2加速度快慢、减速速率、加减速时间的评价3.3齿轮减速器传动系统的可靠性分析四、设计4.1测试参数的构建4.2设计步骤五、结果5.1性能分析结果5.2加减速器传动系统实际运行结果六、结论6.1加减速器传动系统优化设计的结果6.2总结引言在过去的几十年间,行星齿轮减速器传动系统一直是各种机械系统中重要的组成部分。
在传动系统中,它具有空间尺寸的小巧性和高效的输出能力,能够获得良好的动力学性能,从而使机械系统可靠地运行。
MAT1AB作为一种用于科学计算、算法开发、数据可视化和系统建模的编程环境,通过它可进行多任务多模型的建模和仿真,能够快速、有效地完成行星齿轮减速器传动系统的优化设计。
本文的研究目的是使用MAT1AB来实现基于参数化设计的行星齿轮减速器传动系统的优化设计。
首先,根据实际条件建立MAT1AB动力学模型,分析模型中每个参数对整个减速器性能的影响,并据此重新定义减速器传动准则;其次,根据新的准则,通过数值分析优化行星齿轮减速器传动系统的性能,并进行仿真验证;最后,根据仿真结果对减速器进行设计,最终获得错误率低、运行可靠的行星齿轮减速器传动系统。
因此,本文的主要研究内容是基于MAT1AB行星齿轮减速器传动系统的优化设计研究。
本文的论文框架将于以下章节:第二章是描述MAT1AB模型建立及传动准则定义方法;第三章将对基于参数化设计的数值分析进行说明;第四章涉及减速器的测试参数和实际设计;第五章将汇总设计的性能分析结果;第六章将总结本文的结论。
第二章:分析方法本章的内容主要包括三部分:第一部分是基于MAT1AB的行星齿轮减速器传动系统模型建立;第二部分是重新定义减速器传动准则;第三部分是对动力学性能优化。
MAT1AB作为科学计算、算法开发、数据可视化和系统建模的编程环境,可以进行多任务多模型的建模和仿真,能快速、有效地完成行星齿轮减速器传动系统的优化设计。
行星齿轮减速器可靠性优化设计研究摘要为了减轻行星齿轮减速器的重量,提高承载效率,取行星齿轮减速器的太阳轮和齿圈的齿数、模数和齿宽为设计变量,以减速器体积最小化为优化目标,利用Matlab优化工具箱对行星齿轮减速器进行优化设计计算。
计算结果表明,采用可靠性优化设计方法可以缩短设计周期并减小体积。
关键词行星齿轮;减速器;体积;优化设计行星齿轮减速器具有传动比大、传动效率高、结构紧凑等优点,广泛用于小轿车、载重汽车、工程车辆等机械设备的传动系统中。
行星齿轮减速器的可靠性设计和轻量化设计,对车辆的动力性、燃油经济性有很大影响。
与常规设计方法相比,可靠性优化设计在提高设计效率的同时可以找出更优的可行方案。
1 目标函数的建立行星齿轮减速器由太阳轮、行星轮、行星支架和内齿轮等组成。
太阳轮、行星轮组及内齿圈的体积影响并决定整个行星减速器的尺寸和体积,为此将内齿圈的体积考虑在内,其模型为式中,F(X)为太阳轮、行星轮和内齿圈体积之和,n为行星轮个数,按行星轮系类型选定为3;m和b分别为模数和齿轮齿宽;Va、Da、Za分别为太阳轮的体积、分度圆直径和齿数;Vb、Db、Zb分别为内齿圈的体积、分度圆直径和齿数;Vc、Dc、Zc分别为行星轮的体积、分度圆直径和齿数。
S为内齿圈分度圆到外圆的距离,S=hf+δ,其中hf为其齿根高,hf=1.25m,δ为内齿圈壁厚,取δ=m。
Dw为第内齿圈外圆直径,Dw=Db+2S。
根据行星轮系同心条件,目标函数可化为:(2)2 设计变量的确定根据目标函数式,取太阳轮齿数Za、齿圈齿数Zb、模数m、齿宽b这四个独立参数为设计变量,即:(3)由此,目标函数进一步化为(4)3 约束条件的建立3.1 传动比条件→(5)式中:i0、i分别为优化前、后减速器传动比。
3.2 同心条件→ (6)式中,是与对应的设计变量。
3.3 安装条件→(7)式中,为正整数。
3.4 邻接条件→(8)式中dac为行星轮齿顶圆直径;为太阳轮和行星轮啮合副的中心距。
行星齿轮的优化设计优化设计就是用现代优化设计方法,对数学模型求解的不断分析和综合迭代过程。
因此,一个重要而关键的任务是建立正确的能反应实际情况的数学模型,并选择合适的优化方法求解。
在优化迭代过程中,首选对系统进行分析,因此要建立分析数学模型,分析之后进行优化。
图1为建立优化模型过程的具体化。
一、优化设计数学模型的建立1、 建立目标函数图2所示是行星齿轮减速器的运动简图。
行星齿轮传动的体积基本上决定了产品材料的消耗量,空间布置的难易,制造成本的大小,是一项重要的综合性目标。
在行星齿轮减速器中,太阳轮和全部行星轮的体积之和能影响和决定齿圈或整个机构的尺寸和体积,因此选择太阳轮a 与行星轮c 体积之和为优化目标函数,目标函数表达式为:f (x )=V =V 1+qV 2=π4(d 1+qd 1d 2)φd (1) d 1—齿轮a 的分度圆直径d 2—齿轮c 的分度圆直径φd —齿宽系数q —行星轮个数(1)行星齿轮减速器各轮齿数的关系必须满足传动比条件:i =1+zb z a (2) (2)同轴条件:不满意选定设计方案 明确问题,确定设计要求和优化范围 分析设计对象确定设计变量 选择和构造目标函数 确定系统边界 建立约束函数 选择合适的优化求解方法 对结果分析和评价结束数学模型的规范化量纲分析,尺度分析 满意图一z c =z b −z a 2 (3)将d 1=mz a ,d 2=mz c 带入公式(2)(3),经整理后得目标函数为:f (x )=0.19635x 1x 2x 3[4+(i −2)2q](3)设计变量 [x 1 x 2 x 3]=[z a b m]2、 约束条件(1)、齿面接触强度在齿面接触疲劳强度计算方面,只考虑外啮合副的接触强度条件作为设计约束,根据对圆柱齿轮轮齿接触强度的要求,得:d 1≫K d √T 1K A K p φd (σHP )21−μμ3式中:k d ———算式系数;T 1———啮合齿轮副中小齿轮的名义转矩,N ·m 应是功率分流后的值;K A ———工况系数;K β———载荷分布系数;φd ———齿宽系数;σHP ———齿轮接触疲劳许用应力,(MPa);u ———外啮合副传动比。
摘要行星齿轮减速器是原动机和工作机之间的独立封闭传动装置,用来降低转速和增大转矩以满足各种工作机械的要求,行星齿轮传动与普通齿轮传动相比, 具有结构紧凑、体积小、重量轻、效率高、传动比大等优点, 因此得到了广泛的应用。
但是在国内在研究生产行星齿轮减速器方面还存在一定局限,为了适应生产发展需要,本论文通过初步分析行星齿轮减速器的总体结构设计,为行星齿轮减速器的进一步研制和开发提供理论依据。
论文首先介绍了行星齿轮减速器的特点和要求,并对国内外行星齿轮减速器的发展现状和发展前景作了分析。
结合目前存在的行星齿轮传动原理以及生产上对行星齿轮减速器技术要求进行了初步分析,并通过设计和计算,完成了减速器的零件设计,整体设计,初步确定了行星齿轮减速器总体结构设计。
为行星齿轮减速器产品的开发和性。
能评价,实现行星齿轮减速器规模化生产提供了参考和理论依据。
关键词: 减速器行星齿轮优化设计Title Planetary gear-type speed reducerAbstractPlanetary gear reducer is the prime mover and an independent closed between gear to reduce speed and increase torque in order to meet the requirements of a variety of mechanical work, planetary gear transmission as compared with ordinary gear drive with compact structure, small size, light weight, high efficiency, the transmission ratio advantages, it has been widely used. However, in domestic production in the study of planetary gear reducer that there are still some limitations, in order to meet the development needs of production, a preliminary analysis of this thesis through the planetary gear reducer overall structural design, planetary gear reducer for further research and development and provide a theoretical basis.Paper introduces the characteristics of planetary gear reducer and demands at home and abroad and the development of planetary gear reducer and development prospects of the status quo analyzed. Combination of existing principles of planetary gear transmission and the production of planetary gear reducer on the technical requirements of a preliminary analysis, and through the design and calculation of the parts to complete the design of the reducer, the overall design, initially set the overall structure of planetary gear reducer design . Planetary gear reducer for product development and performance evaluation of planetary gear reducer to achieve large-scale production to provide a reference and theoretical basis.Keywords: Reducer planetary gear reducer planetary gear drive.目录摘要 (I)ABSTRACT........................................................... I I 绪论.. (1)1.1 齿轮传动的发展简介 (1)1.2 行星齿轮的发展及特点 (1)1.3 机械优化设计的发展概况 (4)1.4行星齿轮的设计任务 (5)2、行星轮系的设计 (6)2. 1 行星轮系类型的选择 (6)2.2 行星轮系各轮齿数的确定 (6)2.3 行星轮系的均载装置 (9)2.4 行星齿轮传动的受力分析及强度计算 (9)2.5 行星齿轮的传统设计 (12)3、行星齿轮减速器优化设计 (14)3.1 行星齿轮减速器的数学模型 (14)3.2 优化方法及原理 (16)3.3 行星齿轮的约束优化方法 (18)4、VISUAL BASIC程序简要说明 (23)4.1 变量和数组 (23)4.2 Visual Basic控制结构 (24)4.3优化程序的简要说明 (28)5、结果与分析 (29)结构计算 (30)致谢........................................... 错误!未定义书签。