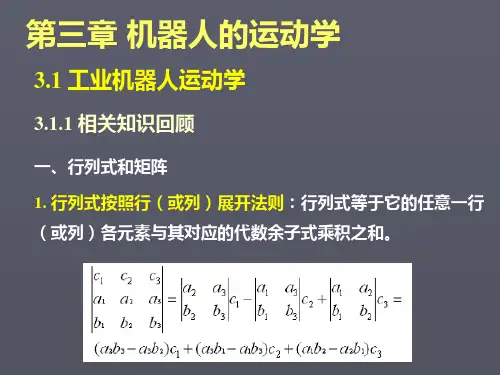
0T 0T 6A 1A 2A 3A 4A 5A 6
Z0 Z2
Z1
Z2 Z1 Z0
Z4 Z3
Z6 Z5
反向运动学
❖ 反向求解
——在已知手部要达到的目标位姿的情况下求 出各关节变量,以驱动各关节马达,使手部位 姿得到满足。
❖ 机器人运动学逆解问题求解存在若干问题:
解可能不存在; 存在多重解; 求解方法的多样性—分离变量法/直接求解法。
Z2 c2 0 0s2 01 0Y3 0
Z1
s2
0
0
0 1 0
00c2
0
X3
0
0Z2
d2 X2 1
0
1
Y2
A2
A3
A6 Rot (Zz3 5 ,6 )TranZs4 (0,0, H
Z6
X4
Y4
Z3
Z5
Z4
A4
c6
s5Rco6tX3(
s6
Yc3 5s6
z3 ,csZ654 4s)6
Xb
XP-Lcαcβ
Yb = YP-L(sαcγ +cαsβsγ)
(5)
Zb
ZP-L(sαsγ -cαsβcγ)
分析该机构特点,得Xa≡L, Yb≡L, Zc≡L,可建立该机构的位姿约束方程:
XP-Lsβ-L = 0
YP-L(sαcγ +cαsβsγ) -L= 0
(6)
ZP-L(cαsγ +sαsβcγ) -L= 0
A3
s
3
0
c 3 0
0
0
0
1
0
0
1 00 0 1 0
0
0
0
1
0
0