机器人指南车
- 格式:doc
- 大小:433.00 KB
- 文档页数:5
中国人的一百项发明中国人的一百项发明1、鼓:公元前2世纪中国人发明了定音鼓。
2、二进位制:相传在公元前3000年伏羲发明了二进位制3、绳索:公元前2800年,中国人已经掌握了创造麻绳的技术。
4、指南针:相传公元前2700年中国的轩辕黄帝发明了指南针。
5、养鱼法:公元前2500年中国人已经懂得养鱼。
6、赤道式天文仪:公元前2400年,中国人发明了赤道式天文仪。
7、十进计数制:中国人于公元前14世纪,发明了十进计数制。
8、印刷术:公元前1324年,中国人已会雕刻印章,用墨水印在文件上。
1040年代中国刻字工人毕升在北京历年间发明了活字印刷术。
1107年,中国人还发明了彩色印刷术。
9、漆――世界第一种塑料:中国人最迟在公元前13世纪已经发明使用了漆。
10、铜镜:约公元前12世纪中国人发明了铜镜。
11、伞:公元前1100年,中国人已经使用伞。
也有人说,公元4世纪三国时期中国人才发明了伞。
12、风筝:公元前1000年,中国人最先放风筝。
风筝飞上天空为飞机飞上天空提供了原理和灵感。
13、米酒:公元前1000年,中国人发明了米酒。
14、弓箭:中国人于公元前8世纪发明了弓箭。
而欧洲的意大利在公元10世纪才使用弓,比我国晚了一千二百年。
15、古代机器人:公元前770年至公元前256年东周时期,中国人就已发明了古代机器人。
16、分行栽培与精细耕地法:公元前6世纪,中国人发明了分行栽培与精细耕地法;欧洲人到1731年才使用此项技术,比中国晚了二千四百年左右。
17、铁犁:公元前6世纪,中国人发明了铁犁。
欧洲人到17世纪才使用铁犁,比中国晚了二千三百年左右。
18、大定音钟:中国人于公元前6世纪发明了大定音钟;欧洲人到公元1000年才有定音钟,比中国晚了一千六百年左右。
19、长明灯:大约在公元前589年,中国人发明了长明灯。
灯蕊为石棉;灯油为海豹油或鲸油。
20、算盘:公元前550年中国人发明了算盘,用于计算。
21、地毯:公元前五百年地毯已在中国应用。
指南车的原理
指南车是一种用于铁路轨道上的车辆,它具有特殊的设计和原理,使得它能够在铁路轨道上行驶并保持方向稳定。
下面将介绍指南车的原理及其工作原理。
首先,指南车的原理基于轨道的几何特性。
铁路轨道是由两条平行的钢轨组成,它们之间的距离是固定的,这就为指南车提供了一个稳定的轨道。
指南车的轮子被设计成与轨道的轨距相匹配,这样它就能够沿着轨道行驶而不会偏离轨道。
其次,指南车的原理还涉及到车辆的悬挂系统。
指南车通常采用了特殊的悬挂系统,它能够使车辆保持平稳的行驶。
这种悬挂系统通常包括弹簧和减震器,它们能够减少车辆在行驶过程中的颠簸和震动,从而保持车辆的稳定性。
另外,指南车的原理还包括了车辆的转向系统。
指南车通常采用了转向架来实现车辆的转向。
转向架能够使车辆在行驶过程中改变方向,从而保持车辆沿着轨道行驶。
转向架通常由转向架架、转向架轴和转向架轮组成,它们能够使车辆在行驶过程中保持稳定的转向。
最后,指南车的原理还涉及到车辆的动力系统。
指南车通常由内燃机或电动机驱动,它们能够为车辆提供动力,使得车辆能够在铁路轨道上行驶。
动力系统还包括了传动系统,它能够将动力传递给车辆的轮子,从而推动车辆行驶。
综上所述,指南车的原理涉及到轨道的几何特性、车辆的悬挂系统、转向系统和动力系统。
这些原理共同作用,使得指南车能够在铁路轨道上行驶并保持方向稳定。
指南车的原理不仅是铁路运输的基础,也是铁路运输安全和稳定的保障。
希望通过本文的介绍,读者能够更加深入地了解指南车的原理及其工作原理。
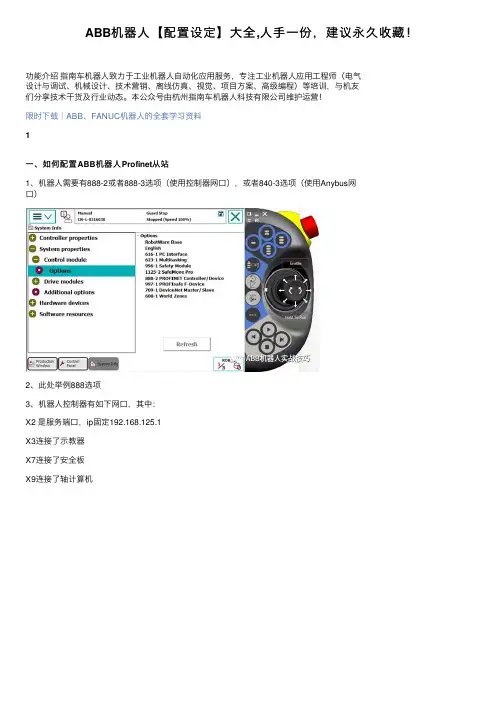
ABB机器⼈【配置设定】⼤全,⼈⼿⼀份,建议永久收藏!功能介绍指南车机器⼈致⼒于⼯业机器⼈⾃动化应⽤服务,专注⼯业机器⼈应⽤⼯程师(电⽓设计与调试、机械设计、技术营销、离线仿真、视觉、项⽬⽅案、⾼级编程)等培训,与机友们分享技术⼲货及⾏业动态。
本公众号由杭州指南车机器⼈科技有限公司维护运营!限时下载|ABB、FANUC机器⼈的全套学习资料1⼀、如何配置ABB机器⼈Profinet从站1、机器⼈需要有888-2或者888-3选项(使⽤控制器⽹⼝),或者840-3选项(使⽤Anybus⽹⼝)2、此处举例888选项3、机器⼈控制器有如下⽹⼝,其中:X2 是服务端⼝,ip固定192.168.125.1X3连接了⽰教器X7连接了安全板X9连接了轴计算机4、Profinet可以连接WAN⼝或者LAN3⼝,根据设置连接5、此处举例连接WAN⼝6、控制⾯板,配置,主题选择communication8、点击ProfinetNetwork9、修改ip并选择对应⽹⼝10、重启11、控制⾯板,配置,主题I/O ,PROFINET InternalDevice12、配置输⼊输出字节数。
和PLC那边设置⼀致13、配置界⾯下,进⼊Industry Network,PROFINET14、设置station名字,这个名字要和PLC端对机器⼈的station设置⼀样15、添加signal,device选择profinetInternal device2⼆、ABB机器⼈IO接线与配置1、以DSQC652为例(16进16出)2、上部区域为输出16个点,其中9和10针脚的0v,24v需要从柜门旁边的XT31引过来3、下部区域为16个输⼊点,9号针脚的0v需要从XT31引过来4、左侧区域短接⽚为地址位,默认为10,如下图(剪掉的为1,留下的是0,⾼电平有效)。
如果要修改板卡地址,在这⾥修改,机器⼈⾥也要做对应配置5、6、控制⾯板,配置,找到devicenetdevice,添加(如果已经显⽰添加,则不需要再添加)7、模板选择652,地址根据前⾯短接⽚设置,默认为108、确定后,暂时不重启,全部配置完再⼀起重启9、进⼊Signal,点击添加10、举例,⼀个输出设置如下设置name,type选择digital output,assigneddevice选择刚配置好的板卡,设置mapping。

简要描述指南车的工作原理导航车通常配备有各种传感器,包括激光雷达、摄像头、红外传感器、超声波传感器等,用于感知周围环境的信息。
通过这些传感器收集到的数据,导航车可以实时地获取周围环境的信息,如障碍物的位置和形状、地面的颜色和纹理、自身的位置和朝向等。
这些信息是导航车进行定位、路径规划和避障的基础。
导航车的控制器是其核心部件,其中包括主控制单元、驱动系统、电源管理系统等。
主控制单元是导航车的大脑,负责协调传感器的数据、执行导航算法、控制车辆的运动等。
驱动系统包括电机、电池、轮子等,用于实现导航车的移动。
电源管理系统则负责管理导航车的电力供应、充电等。
导航车的导航算法是其关键技术之一,主要包括定位和路径规划两部分。
定位算法是指导航车确定自身位置和姿态的方法,常用的技术包括激光定位、视觉定位、惯性导航等。
路径规划算法是指导航车计算从起点到终点的最佳路径的方法,常用的技术包括A*算法、Dijkstra算法、遗传算法等。
通过这些算法的配合,导航车可以高效地规划路径、避开障碍物,并按照预定的路线完成任务。
导航车的工作原理可以简单概括为以下几个步骤:首先,导航车通过传感器感知周围环境的信息,包括地面的颜色、障碍物的位置等;然后,导航车利用定位算法确定自身的位置和朝向;接着,导航车根据路径规划算法计算出最佳路径,并执行运动控制;最后,导航车持续地更新环境信息、定位和路径规划,实现自主的移动和任务执行。
总的来说,导航车是一种利用先进的传感技术和自动控制系统实现自主移动和任务执行的机器人。
它的工作原理主要是通过集成的传感器获取环境信息、控制系统实现定位和路径规划,并利用导航算法实现自主移动和任务执行。
导航车的应用领域广泛,包括工业自动化、服务机器人、物流运输等,具有广阔的发展前景。
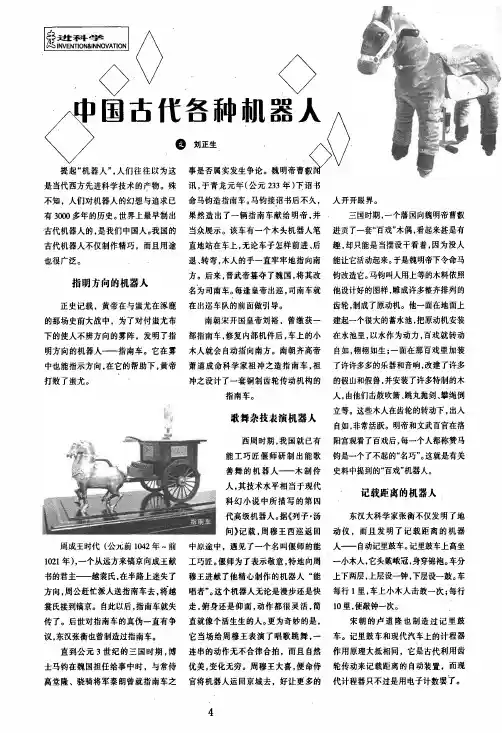
中国古代各种机器人作者:刘正生来源:《发明与创新(学生版)》2008年第05期提起“机器人”,人们往往以为这是当代西方先进科学技术的产物。
殊不知,人们对机器人的幻想与追求已有3000多年的历史。
世界上最早制出古代机器人的,是我们中国人。
我国的古代机器人不仅制作精巧,而且用途也很广泛。
指明方向的机器人正史记载,黄帝在与蚩尤在涿鹿的那场史前大战中,为了对付蚩尤布下的使人不辨方向的雾阵,发明了指明方向的机器人——指南车。
它在雾中也能指示方向,在它的帮助下,黄帝打败了蚩尤。
周成王时代(公元前1042年~前1021年),一个从远方来镐京向成王献书的君主——越裳氏,在半路上迷失了方向,周公赶忙派人送指南车去,将越裳氏接到镐京。
自此以后,指南车就失传了。
后世对指南车的真伪一直有争议,东汉张衡也曾制造过指南车。
直到公元3世纪的三国时期,博士马钧在魏国担任给事中时,与常侍高堂隆、骁骑将军秦朗曾就指南车之事是否属实发生争论。
魏明帝曹叡闻讯,于青龙元年(公元233年)下诏书命马钧造指南车。
马钧接诏书后不久,果然造出了一辆指南车献给明帝,并当众展示。
该车有一个木头机器人笔直地站在车上,无论车子怎样前进、后退、转弯,木人的手一直牢牢地指向南方。
后来,晋武帝篡夺了魏国,将其改名为司南车。
每逢皇帝出巡,司南车就在出巡车队的前面做引导。
南朝宋开国皇帝刘裕,曾缴获一部指南车,修复内部机件后,车上的小木人就会自动指向南方。
南朝齐高帝萧道成命科学家祖冲之造指南车,祖冲之设计了一套铜制齿轮传动机构的指南车。
歌舞杂技表演机器人西周时期,我国就已有能工巧匠偃师研制出能歌善舞的机器人——木制伶人,其技术水平相当于现代科幻小说中所描写的第四代高级机器人。
据《列子·汤问》记载,周穆王西巡返回中原途中,遇见了一个名叫偃师的能工巧匠。
偃师为了表示敬意,特地向周穆王进献了他精心制作的机器人“能唱者”。
这个机器人无论是漫步还是快走,俯身还是仰面,动作都很灵活,简直就像个活生生的人。
Enterprise Development专业品质权威Analysis Report企业发展分析报告福州指南车机器人科技有限公司免责声明:本报告通过对该企业公开数据进行分析生成,并不完全代表我方对该企业的意见,如有错误请及时联系;本报告出于对企业发展研究目的产生,仅供参考,在任何情况下,使用本报告所引起的一切后果,我方不承担任何责任:本报告不得用于一切商业用途,如需引用或合作,请与我方联系:福州指南车机器人科技有限公司1企业发展分析结果1.1 企业发展指数得分企业发展指数得分福州指南车机器人科技有限公司综合得分说明:企业发展指数根据企业规模、企业创新、企业风险、企业活力四个维度对企业发展情况进行评价。
该企业的综合评价得分需要您得到该公司授权后,我们将协助您分析给出。
1.2 企业画像类别内容行业空资质空产品服务:技术服务、技术开发、技术咨询、技术交流、1.3 发展历程2工商2.1工商信息2.2工商变更2.3股东结构2.4主要人员2.5分支机构2.6对外投资2.7企业年报2.8股权出质2.9动产抵押2.10司法协助2.11清算2.12注销3投融资3.1融资历史3.2投资事件3.3核心团队3.4企业业务4企业信用4.1企业信用4.2行政许可-工商局4.3行政处罚-信用中国4.4行政处罚-工商局4.5税务评级4.6税务处罚4.7经营异常4.8经营异常-工商局4.9采购不良行为4.10产品抽查4.11产品抽查-工商局4.12欠税公告4.13环保处罚4.14被执行人5司法文书5.1法律诉讼(当事人)5.2法律诉讼(相关人)5.3开庭公告5.4被执行人5.5法院公告5.6破产暂无破产数据6企业资质6.1资质许可6.2人员资质6.3产品许可6.4特殊许可7知识产权7.1商标7.2专利7.3软件著作权7.4作品著作权7.5网站备案7.6应用APP7.7微信公众号8招标中标8.1政府招标8.2政府中标8.3央企招标8.4央企中标9标准9.1国家标准9.2行业标准9.3团体标准9.4地方标准10成果奖励10.1国家奖励10.2省部奖励10.3社会奖励10.4科技成果11土地11.1大块土地出让11.2出让公告11.3土地抵押11.4地块公示11.5大企业购地11.6土地出租11.7土地结果11.8土地转让12基金12.1国家自然基金12.2国家自然基金成果12.3国家社科基金13招聘13.1招聘信息感谢阅读:感谢您耐心地阅读这份企业调查分析报告。
指南车原理
指南车是一种具有特殊机械构造的车辆,可以实现车身的
侧向移动。
它的原理主要包括以下几点:
1. 差速器原理:指南车通常具有差速器,差速器可以将动
力从发动机传递到车轮上,并且可以根据车轮的旋转速度
差异来实现车身的侧向移动。
当车辆转弯时,内侧车轮和
外侧车轮的旋转速度会有差异,差速器会根据差异来分配
动力,使车轮能够以不同速度旋转,从而实现车身的侧向
移动。
2. 转向机构原理:指南车的转向机构通常采用了特殊设计,可以使车轮在一个方向上旋转,而车身在另一个方向上移动。
常见的转向机构包括前轮转向、后轮转向以及四轮转
向等,这些机构可以通过改变车轮的角度来改变车辆的侧
向移动。
3. 悬挂系统原理:指南车的悬挂系统也对车身的侧向移动起到一定的作用。
悬挂系统可以使车轮相对于车身上下移动,从而能够适应不同的路况和转弯角度,实现车身的平稳侧向移动。
综上所述,指南车的原理主要包括差速器的差速原理、转向机构的设计以及悬挂系统的作用。
通过这些原理的协同作用,指南车能够实现车身的侧向移动。

全国青少年机器人技术等级考试一二级理论机器人相关理论与知识rw机器人等彼琴试专注于求知与考证"Robot"的由来1920年,原捷克斯洛伐克剧作家卡尔•恰佩克在他的科幻情节剧《罗萨姆的万能机器人》中,第一次提出了"机器人"(Robot)这个名词。
在捷克语中,Robot这个词是指一个服役的奴隶。
Robota(捷克文,原意为"劳役、苦工")Robotnik(波兰文,原意为"工人"二、机器人发展史人们对机器人的幻想与追求已有3000多年的历史。
"机器人"最早是以自动机械装置或自动人偶的形式出现,西方国家将早期的机器人称之为automation(自动机)或是self-operatingmachine(自行控制机器)。
1)古代机器人指南车。
人类记载的最早的机械装置。
《古今注》记载黄帝与蚩尤涿鹿之战所用。
春秋时期,"公输子削竹木以为鹊,成而飞之,三日不下。
"记载于《墨子.鲁问》中,是世界上最早的关于空中机器人的记载。
记里鼓车。
汉代,大科学家张衡不仅发明了地动仪,而且发明了计里鼓车。
计里鼓车每行一里,车上木人击木马车鼓一下,每行十里击钟一下。
春秋时期,"公输子削竹木以为鹊,成而飞之,三日不下。
"记载于《墨子.鲁问》中,是世界上最早的关于空中机器人的记载。
记里鼓车。
汉代,大科学家张衡不仅发明了地动仪,而且发明了计里鼓车。
计里鼓车每行一里,车上木人击木马车鼓一下,每行十里击钟一下。
木构水运仪象台。
北宋时期,苏颂等人制造了当时世界上最先进的天文钟。
它由水力驱动,能以多种形式表现天体运行。
它能集观测天象的浑仪、演示天象的浑象、计量时间的漏刻和报告时刻,是一座小型的天文台根据史料记载,三国时期诸葛亮发明了一种用来运送军用物资的机器人,名为()A.记里鼓车B.指南车C.木牛流马D.千里船答案:C题型:单选题漏壶。
引言关于本手册本手册是为了让技术人员快速、正确、安全地安装、使用AIR6SC600-A型工业机器人,熟悉相关注意事项以及对操作机做定期常规维护工作。
操作前提在操作机器人前,请务必仔细阅读产品的通用安全说明和安全预防措施,用户需在了解安全知识和基础操作知识之后,才可操作机器人。
请在必要时参阅:◼《inCube2S 控制柜手册》◼《SCARA型示教器操作手册》◼《ARL 编程手册》◼《AIR6SC600-A 水平多关节型工业机器人系统快速入门手册》目标群体◼操作人员◼产品技术人员◼技术服务人员◼机器人示教员常见标识含义手册中出现标识及其含义详见下表1。
表1 本文中使用的标识手册说明本手册内容会有补充和修改,请定时留意我公司网站的“下载中心”,及时获取最新版本的手册。
我公司网站网址:/修订记录修订记录累积了每次文档更新的说明。
最新版本的文档包含以前所有文档版本的更新内容。
表2 文档修订记录文档编号及版本文档编号及版本信息见表3。
表3文档相关信息适用安全标准的声明工业机器人系统设计符合的要求详见表4。
表4 适用安全标准的声明通用安全说明感谢贵公司购买本公司操作机,本说明资料为安全使用操作机而需要遵守的内容,在使用操作机之前,请务必仔细阅读相关手册,并且在理解该内容的前提下正确使用操作机。
有关操作机的详细功能,请用户通过相关说明书充分理解其规格。
安全注意事项一般情况下,操作机不能单个进行作业,只有安装上末端执行器,构架起外围设备和系统才可以进行作业。
在考虑其安全性时,不能将操作机独立起来考虑,而应将其置于系统环境中考虑。
警告、注意和提示本说明书包括保证操作人员人身安全以及防止操作机损坏的注意事项,并根据它们在安全方面的重要程度,在文中以“警告”和“注意”来叙述,有关补充说明以“提示”来描述。
用户在使用操作机之前,必须熟读这些“警告”、“注意”和“提示”中所叙述的事项。
一般注意事项安装时注意事项操作时注意事项目录引言 (I)通用安全说明 (IV)目录 (I)1产品规范 (1)1.1一般功能和预定用途的应用范围 (1)1.2环境条件与工作和储存的限制 (1)1.2.1使用环境要求 (1)1.2.2长期储存环境条件 (1)1.2.3储存相关注意事项 (2)1.3基本规格 (2)2机器人系统介绍 (4)2.1工业机器人简介 (4)2.2操作机基本构成 (4)2.3产品标签及含义 (5)3使用前的准备 (8)3.1使用前的安全防护措施 (8)3.2拆包 (9)3.2.1拆包方式 (9)3.2.2包装材料的安全处置 (10)3.2.3废弃材料处置 (11)3.3安装前的准备工作 (11)3.3.1安装注意事项 (11)3.3.2安装工具及所需连接件 (11)3.4安装和装配 (11)3.4.1技术规格 (11)3.4.2固定方式 (12)4电气接口 (14)4.1操作机电气接口类型 (14)4.2本体侧重载线接口 (16)4.3柜体侧重载线接口 (18)4.4操作机用户I/O接口 (19)4.5电源线接口 (20)5工作说明 (22)5.1安全注意事项 (22)5.2安全运行 (23)5.2.1LED指示灯 (23)5.2.2结构尺寸 (23)5.2.3各轴工作范围 (24)5.2.4机械限位 (25)5.2.5停止方式 (26)5.3标定 (26)5.3.1何时需要标定 (26)5.3.2各轴标定位置 (26)5.3.3各轴运动方向 (28)5.3.4各轴速度 (28)5.4法兰连接尺寸 (29)5.5负载安装 (29)6运输与搬运 (31)6.1搬运姿态 (31)6.2搬运尺寸 (32)6.3搬运方法 (33)7预防性的维护 (35)7.1安全防护措施 (35)7.2日常维护 (36)7.3首次维护 (37)7.4定期维护 (38)7.5润滑脂加注 (40)8项目维护流程 (41)8.1清洁操作机 (41)8.2检修线缆 (41)8.3更换电池 (43)8.4更换同步带 (44)9故障查找、诊断和维修 (52)附录A AIR6SC600-A型操作机定期维护表 (58)附录B 螺钉强度及螺钉拧紧力矩表(NM) (59)1产品规范1.1一般功能和预定用途的应用范围工业机器人系统用于搬运工具和装置,或加工和运输工件或产品。
室内自主机器人的实时避障与导航系统的设计与实现摘要本文根据ABU2007机器人大赛的规则要求,对机器人的控制系统和调试方法做了比较深入的探索,并实际完成了所有机器人的软件控制系统。
机器人采用了TI公司的TMS320LF2407A作为核心控制器,使用EP1C3T144C8作为外设控制器,很好地解放了核心对外设的接口控制,使得DSP能够更加高效地用于定位计算。
本文成功解决了机器人导航过程中的定位、累计误差修正、路径规划以及避障等问题,使其运动多线多样化,提高了机器人的灵活性和可靠性。
另外,本文在机器系统中引入了无线调试系统,使得机器人在运行过程中的各种信息变的可控可观测,极大地加快了系统的调试进度。
同时,调试系统的PC端程序可以生成机器人的路线代码,使得机器人策略路线的制定更加方便可靠。
整个机器人系统在经过长时间的实地测试与改进后,基本达到了设计要求,为本次成功参赛垫定了坚实基础,也为以后机器人控制系统的设计积累了十分宝贵的经验。
关键词:机器人,定位,路径规划,避障,无线调试,DSPDesign and Implementation of Real-Time Navigation and Obstruction Avoidance for Indoor Autonomic Mobile RobotAbstractIn this page, we have made a deep research about the robot control system and the debug method according to the subject and rule of the ABU2007 contest, then we finished the software control system of all the robots. The system use TI’s product TMS320LF2407A to be the core controller, and the FPAG EP1C3T144C8 as the assistant controller, which works very well to make the DSP computes more effectively. This page resolves the localization, correcting of accumulative total error, path plan and avoiding the obstruction successfully, which makes the robots have more path to move, and improves the moving agility and reliability of the robots. Additionally, we developed a wireless debug system, so that we have a real-time program to watch the trace and parameters that we are interested in. We can change the important parameters of the robots and set the path by the real-time control program. The hole system has been tested and improved for a long time. It reach the design goal basically, so that we can join the contest successfully, and also gives much important experience to the following design.Keywords: localization, path plan, obstruction avoidance, wireless debug, DSP目录1绪论 (1)1.1 室内自主机器人导航与壁障系统的发展现状 (1)1.2 ABU大学生机器人电视大赛背景资料 (1)1.3 赛事现状和技术概况 (2)2课题背景 (3)2.1 比赛场地介绍 (3)2.2 机器人 (3)2.3 积分规则 (4)2.4 方案总体 (4)2.5 具体方案 (4)3机器人控制电路分析与设计 (6)3.1 硬件选型 (6)3.2 地址映射 (6)3.3 FPGA外设控制器 (6)3.4 电机驱动 (7)3.5 印刷电路板 (8)4机器人控制软件分析与设计 (9)4.1 定位方式介绍 (9)4.2 机器人定位系统 (11)4.3 机器人导航算法 (13)4.4 机器人避障策略 (14)4.5 路径规划算法 (15)4.6 超时处理 (17)4.7 软件系统 (17)5无线调试系统 (19)5.1 无线串口收发器 (19)5.2 串口通讯协议 (19)5.3 PC端控制程序 (19)6总结 (21)致谢 (23)参考文献 (24)附录 (25)附录一:机器人实物图 (25)附录二:定位算法源代码 (26)附录三:路径规划核心源代码 (27)1绪论机器人是一类能够自动完成某项功能的机械系统,机器人通过传感器和执行机构与外界进行信息物理和交互,处理器负责处理传感器采集来的信息并将相应的控制命令送给执行机构执行。
在中国浩如烟海的历史文献和历史文物中,埋藏着-些令人难以置信的惊人“智能神器”智能机器人、自动化“黑科技”装置,它们既闪耀着"人工智能”的光辉,又蕴含着古代手工匠人的初心.....3000多年前,有为周穆王献舞的机器演员;1 800多年前,诸葛亮发明的不劳人力就可运输10万大军粮草的木牛流马;1300多年前,专供唐朝皇后梳妆打扮的自动梳妆台;采用精妙的机械原理来指示方向的指南车;堪称现代计程车始祖的记里鼓车....古代的” 人工智能”到底有多强酷炫?可能超乎你的想象。
据历史学家统计,出现在东汉末年至魏晋南北朝的历史文献中的机器人共有91个。
它们所承担的功能角色,可谓包罗万象。
有负责看i门]的、舂米的、割麦子的、提水的机器人来帮助古人进行日常劳作;有善歌舞的、杂技表演的、劝酒的机器人为人们提供娱乐服务;甚至还有专门抓老鼠的机器人。
说到三国,便不可不提那个时期脑子最好使的人一诸葛孔明。
相传诸葛亮在北伐时,为了给前线的10万大军补给粮草,发明了名为"木牛流马”的运输工具。
据考证,诸葛亮在8年北伐中,共用过3次木牛流马。
《三国志诸葛亮传》记载:“亮性长于巧思,损益连弩,木牛流马,皆出其意。
《三国志后主传》记载: "建兴九年,亮复出祁山,以木牛运,粮尽退军;十二年春,亮悉大众由斜谷出,以流马运,据武功五丈原,与司马宣王对于渭南。
”记载表明,木牛流马确实是诸葛亮的发明,且木牛、流马分别是两种不同的工具。
但是因为没有任何实物与图形存留于世,使得后世对木牛流马的认识始终是云山雾罩。
诸葛亮的确厉害,但他造机器人的本领很有可能是跟他夫人黄氏学的。
《诸葛忠武书》记载,诸葛亮隐居隆中时,某日有客来访,诸葛亮便让妻子准备饭食。
没想到不一会儿饭菜就上桌了,速度之快让诸葛亮甚觉奇怪。
他跑到厨房一探究竟, 但见“数木人斫麦运磨妹飞...”于是拜妻子为师,也才有了后来他研制出木牛流马的故事。
到了人才辈出的唐朝,擅长制作奇巧物件的“极客”, 做出了一批奇特的“黑科技”开元年间,有位大名鼎鼎的"极客”马待封。
我国科幻电影智能机器人叙事的多维考察作者:黄鸣奋来源:《科普创作评论》2024年第01期[ 关键词] 中国电影科幻电影机器人叙事模式文化[ 中图分类号] J905 [ 文献标识码] A [ DOI ] 10.19957/ki.kpczpl.2024.01.004由于信息科技的迅速发展等原因,机器人在社会生活中所发挥的作用日益受到关注。
机器人叙事不仅反映了相关科技研发的成就、挑战和问题,也表达了人类对于技术、道德和人性的思考。
我国科幻电影所讲述的机器人故事包含了丰富的创意,可以成为多维考察的议题。
本文选取物种维度(Species Dimension)、时间维度和空间维度作为突破口,从九个侧面阐述我国科幻电影中智能机器人叙事的文化意蕴。
这三个维度并列,其语序所遵循的是行为逻辑,即主体在时空中的行动。
其中,物种表示行动的主体,时间表示行动的过程,空间表示行动的场所。
在科幻语境中,智能机器人正是这样的主体。
一、物种维度:人类文化、机器文化与合体文化“物种维度”是指研究所用的参照系中着眼于主体的坐标轴。
它将对生物多样性的认知作为出发点,侧重考察不同类型生命体的特征、功能和关系。
对机器人叙事而言,从物种维度进行考察意味着将智能机器人视为一个独特的“物种”,探讨它们在人类社会中所扮演的角色及影响。
上述考察所选取的参照系是人类文化及其衍生的机器文化和合体文化。
人类文化起源于运用工具以制造工具的实践,体现以人为本的原则。
机器文化是“由机器传播或生成的文化”(culture mediated or generated by machines) [1],在历史上包括复杂工具的发明及近代工业的兴起所产生的社会影响,在现阶段主要是指企图以高新技术重构世界的思想倾向。
合体文化(Combining Culture)可以追溯到关于神灵附身之类传说,在现阶段导源于人机共生的理论和实践,要旨是“人生机生,并育并长”“人运机运,共建美好”[2]。
机器人指南车
作者:
来源:《江苏科技报·E教中国》2018年第02期
学习背景
指南车是中国古代指示方向的一种车辆,中国古籍有“车虽回运而手常指南”的相关记载。
本课尝试借古创今,使用乐高积木搭建创意小车,借助陀螺仪传感器获取小车的旋转角度,在LEGO MINDSTORMS Education EV3编程软件(以下简称“EV3软件”)中利用数学模块、移动槽模块控制小车运行,使其自动转向指定方向。
学生在感受中国古代技术神奇魅力的同时,将创客的教育理念融入具体实际问题的解决过程中,在科学探究中发展学生的实践能力、合作能力和创新意识。
教学目标
知识与技能
1.使用乐高积木设计并搭建一个创意小车。
2.描述陀螺仪传感器的原理和作用。
3.使用陀螺仪传感器采集数值,利用数学模块、移动槽模块实现小车自动转向的控制。
4.使用EV3软件进行程序编写。
过程与方法
1.经历小组合作完成创意小车积木搭建与程序设计的过程。
2.观察分析陀螺仪传感器数值与小车旋转角度的关系。
3.运用阅读资料、自我构思设计、基于学习支架摸索与尝试操作等方法来进行相关内容的自主学习。
情感态度与价值观
1.体验借鉴中国古代指南车的思路,设计现代乐高小车的过程,感受中国古代技术魅力的同时培养创新思维。
2.在小组合作学习中能发挥特长,并积极承担任务,培养合作精神和团队荣誉感。
教学重点与难点
教学重点
1.观察分析陀螺仪传感器数值与小车旋转角度的关系。
2.使用陀螺仪传感器采集数值,利用数学模块、移动槽模块实现小车自动转向的控制。
教学难点
利用陀螺仪传感器模块、数学模块、移动槽模块实现小车自动转向的控制。
教学过程
一、创设情境
指南车是中国古代指示方向的一种车辆,它利用机械传动系统控制车上的木人,无论车子转向何方,木人的手始终指向指南车出发时设置的方向,中国古籍有“车虽回运而手常指南”的相关记载(如图1)。
图1(图片来自网络)
本课以指南车为研究对象,让同学们思考怎样将古代技术思路引入到当今的机器人设计中,开发能自动转回初始方向的乐高小车。
二、需求分析
教师组织学生讨论控制小车能自动转向的关键要素,理解陀螺仪的原理以及在本作品中的作用,并分析驱动小车转向的大致步骤。
三、构思设计
组织学生以小组为单位设计创意小车的草图,并使用乐高积木、陀螺仪传感器、数据线等完成相关组件的搭建与连接。
四、探究新知
教师组织学生以小组为单位将EV3控制器与计算机相连,利用EV3软件观察分析陀螺仪传感器数值与小车旋转角度的关系,大致判断驱动两个电机旋转的参数。
五、编程调试
在前期讨论和观察分析的基础上,教师组织学生小组经历观察现象、发现问题、分析原因、尝试解决等过程,逐步完善程序编写,让学生设计完成符合真实环境的乐高指南车。
六、展示评价
教师组织学生以小组为单位进行作品展示,并向全班同学介绍小组作品特色、设计思路、遇到的问题以及解决的方法,由教师和其他小组一起对作品进行评价。
七、拓展创新
教师提出拓展要求,引导学生对作品进行进一步完善和创新。
案例详解
一、关于乐高小车自动转向的相关讨论
1.需要设定初始角度;
2.需要实时采集小车当前旋转角度的数据;
3.当小车当前角度与初始角度不一致时,持续驱动左右电机让小车原地旋转,直到两个角度一致。
二、陀螺仪传感器的原理、功能与软件模块介绍
陀螺是许多学生玩过的玩具,在一定的初始条件和外在力作用下,陀螺除了不停地自转,同时还会环绕另一个固定的转轴不停地旋转。
人们利用陀螺的力学原理所制成的各种功能的陀螺装置称为陀螺仪,它在科学、技术、军事等各个领域有着广泛的应用。
比如:回转罗盘、定向指示仪、炮弹的翻转等。
乐高EV3中的陀螺仪传感器(如图2)可检测物体的位移、方向和角度以帮助机器人保持平衡或是确定所指的方向,陀螺仪传感器只能检测单个旋转轴的运动,旋转方向通过传感器外壳上的箭头进行指示。
在EV3软件的陀螺仪传感器模块中,可以测量当前值(角度、速率、角度和速率,如图3),或者与设定值(角度、速率)比较,并输出结果(如图4),还可以将陀螺仪重置(如图5)。
图3
图4 图5
三、观察陀螺仪传感器测量数值,分析与小车旋转角度的关系
在乐高小车上加装陀螺仪传感器,传感器接在EV3控制器2号端口(如图6)。
直接在EV3控制器中观察(如图7)。
图6 图7
将EV3控制器连接到电脑,在EV3软件右下角“硬件页面”的“端口查看”选项卡中进行观察(如图8)。
图8
观察分析结论:
角度和速率可以为正数或负数,顺时针旋转为正,逆时针旋转为负,逆时针1周角度数值是-360,逆时针2周角度数值是-720。
注意事项:
乐高陀螺仪传感器的角度可能随时间而“偏移”,导致指向越来越不准确。
建议将EV3的固件升级到最高(作者使用的是V1.09E)。
四、程序设计
根据之前的讨论,设定小车初始角度可通过重置陀螺仪实现(在EV3中陀螺仪传感器的初始方向数值为0);采集小车当前旋转角度的数据可通过陀螺仪传感器的测量角度实现。
当小车当前角度与初始角度不一致时,如果小车偏向逆时针方向,则驱动左右电机让小车顺时针转回初始角度;如果小车偏向顺时针方向,则驱动左右电机让小车逆时针转回初始角度。
小车的原地旋转可以使用数学模块和移动槽模块使左右电机速度互为相反数;角度数据的实时采集以及左右电机在一定条件下的持续工作需要在循环中实现;当小车不断旋转直到测量角度重新为0时,左右电机速度也为0,即小车停止(程序流程如图9)。
图9
五、拓展创新
作品展示交流后,教师给学生一些时间梳理设计思路、完善提升本组作品。
教师也可提出一些拓展任务供学生挑战,如利用“多任务”“等待程序块按钮”等知识,制作可以调整初始方向的小车(即在程序运行中,按一下控制器中心按钮,立即将当前方向设为“0”)。