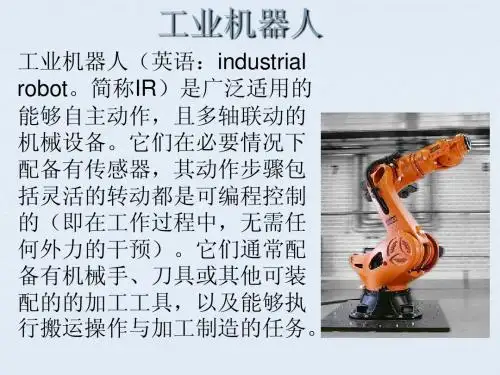
工业机器人
- 格式:pptx
- 大小:12.72 MB
- 文档页数:55
简述工业机器人的定义和主要特征
工业机器人是指专门用于实施工业自动化生产的机器人,其主要任务是执行各种繁重、危险、重复和精密的工业工作。
工业机器人具有以下主要特征:
1. 自主性:工业机器人具备自主决策能力和执行任务的能力,可以根据预设的程序和指令进行操作。
2. 多功能性:工业机器人可以完成多种工业作业任务,如搬运、装配、焊接、喷涂等。
3. 灵活性:工业机器人具备灵活的运动能力和操作空间,可以在不同环境下进行动作、操作和适应。
4. 高精度:工业机器人通过精密的传感器和控制系统,能够实现高精度的工作操作。
5. 高效率:工业机器人可以进行连续的工作操作,能够提高生产效率和生产质量。
6. 安全性:工业机器人具备安全防护措施,通过传感器和安全装置可以确保操作和工作过程的安全。
7. 可编程性:工业机器人可以根据生产需求进行灵活的编程和调整,适应不同的工作任务和生产要求。
总之,工业机器人是一种具备自主性、多功能性、灵活性、高
精度、高效率、安全性和可编程性的自动化设备,可以广泛应用于各个领域的工业生产过程中。
工业机器人名词解释
工业机器人,也称为自动化机器人、工厂机器人或工作机器人,是设计用于在制造业中执行复杂或重复的任务的机器人。
常见的工业机器人包括:
1.装配机器人(Assembly robot):用于组装部件或完成产品的成型。
2.焊接机器人(Welding robot):用于焊接、切割和拼接金属。
3.涂装机器人(Painting robot):用于给汽车、电器、机械等产品进行喷漆或其他涂装工作。
4.运输机器人(Transport robot):用来搬运重量和物品大小较大的物件。
5.包装机器人(Packing robot):包装、打标记、拆卸物品等。
6.测量机器人(Measurement robot):测量零件、扫描物体等。
7.协作机器人(Collaborative robot):经常用来与人类工作者一起工作,共同完成不同的任务。
工业机器人是一种用于自动化生产和制造的机器人设备,它具有多种功能和广泛的应用领域。
以下是工业机器人的一些常见功能和应用:
1. 搬运和装配:工业机器人可以用于搬运重物、零件和材料,并将它们精确地装配在一起。
这可以提高生产效率、减少人力劳动,并确保装配的准确性和一致性。
2. 焊接和喷涂:工业机器人可以进行焊接、点焊、电弧焊等焊接任务,以及喷涂、喷漆等表面处理工作。
它们能够精确控制焊接和喷涂的路径、速度和质量,提高生产的精度和效率。
3. 加工和制造:工业机器人可以用于加工、切割、铣削、钻孔等制造任务。
它们能够执行复杂的加工操作,提高生产的精度和一致性。
4. 检测和质量控制:工业机器人可以配备视觉系统、传感器和检测设备,用于检测产品的质量、尺寸、形状等。
它们能够快速准确地进行检测,提高产品质量和生产效率。
5. 码垛和包装:工业机器人可以用于将货物码垛、堆叠和包装。
它们能够快速而准确地完成这些任务,提高物流效率和包装质量。
6. 清洁和维护:工业机器人可以用于清洁、擦拭、抛光和维护工作。
它们能够在危险或难以到达的区域进行工作,提高工作的安全性和效率。
7. 自动化生产线:工业机器人可以与其他自动化设备和系统集成,形成自动化生产线。
它们能够协调工作,实现生产过程的自动化和智能化。
总的来说,工业机器人的功能和应用非常广泛,可以应用于汽车制造、电子产品、机械加工、食品加工、物流等多个行业。
它们的使用可以提高生产效率、产品质量、工作安全性,并实现生产过程的自动化和智能化。
简述工业机器人的定义及特点工业机器人是指用于工业生产领域的自动化机器人,它是一种能够代替人工完成重复性、繁琐或危险工作的机器人系统。
工业机器人具有高度灵活性、精确性和可编程性的特点,可以在生产线上执行多种不同的任务,提高生产效率和产品质量。
工业机器人的定义:工业机器人是一种能够自动执行某些特定任务的机器人系统,它由机械结构、控制系统、传感器和执行器等组成。
工业机器人通过程序控制,能够完成一系列重复性、繁琐或危险的工作,具有高效、精确、稳定的特点。
工业机器人的特点:1. 高度灵活性:工业机器人具有多轴自由度,可以在三维空间内灵活移动,适应不同的工作环境和任务需求。
机械臂的关节可根据需要进行旋转、伸缩和抓取等操作,具有较强的适应能力。
2. 精确性:工业机器人的运动精度高,能够进行精确定位和操作。
通过精密的控制系统和传感器,工业机器人能够实现毫米级的位置控制和力量控制,保证产品的质量和生产效率。
3. 可编程性:工业机器人可以通过编程实现不同的工作任务和工艺流程。
工业机器人的控制系统通常采用专门的编程语言,如机器人操作系统(ROS)和G代码等,通过编写程序指令,可以实现机器人的自主运动和任务执行。
4. 多功能性:工业机器人可以完成多种不同的任务,包括搬运、装配、焊接、喷涂、包装等。
通过更换不同的工具和末端执行器,工业机器人可以适应不同的生产需求,实现多样化的生产。
5. 自动化:工业机器人具有自动化的特点,可以在无人值守的情况下执行任务。
通过与其他自动化设备和系统的联动,工业机器人能够实现自动化生产流程,提高生产效率和生产线的灵活性。
6. 安全性:工业机器人在设计和工作时考虑了安全性问题,采取了多种安全措施。
例如,通过安全光幕、安全装置和力矩传感器等,可以实现对机器人和人员的安全监测和保护,避免意外伤害。
7. 数据采集和分析:工业机器人可以通过传感器采集工作过程中的数据,如位置、力量、速度等,通过数据分析和处理,可以实现对生产过程的监控和优化,提高生产效率和产品质量。

简述工业机器人的分类工业机器人是一种能够执行各种工业任务的自动化设备,通常由传感器、执行器和控制器组成。
根据工作原理和应用场合,工业机器人可以分为多种类型,以下是常见的分类:1. 按工作原理分类工业机器人按照工作原理可以分为三类:- 感应工业机器人:通过感应工件的位置和形状来执行加工任务的工业机器人。
- 视觉工业机器人:通过视觉传感器识别工件表面并执行加工任务的工业机器人。
- 自主工业机器人:具有自主移动和识别能力的工业机器人,能够通过自主运动和自主识别来完成加工任务。
2. 按功能分类工业机器人按照功能可以分为三类:- 搬运工业机器人:用于将工件或物品从一个位置搬到另一个位置的工业机器人。
- 加工工业机器人:用于完成各种加工任务的工业机器人,如焊接、切割、装配等。
- 装配工业机器人:用于将零部件组装成完整的机器或设备的工业机器人。
3. 按运动方式分类工业机器人按照运动方式可以分为三类:- 固定轨迹工业机器人:能够沿着预先设定好的运动轨迹进行运动的工业机器人。
- 自由轨迹工业机器人:能够自由移动并按照其预设轨迹运动的工业机器人。
- 多轴工业机器人:具有多个轴的自由度,能够进行多种运动方式的工业机器人。
4. 按应用领域分类工业机器人按照应用领域可以分为三类:- 制造业工业机器人:主要用于制造业,如制造工厂、装配车间、焊接车间等。
- 医疗工业机器人:主要用于医疗领域,如手术机器人、牙科机器人等。
- 物流工业机器人:主要用于物流领域,如搬运机器人、配送机器人等。
此外,还可以根据工业机器人的精度、稳定性、安全性、维护性等方面进行分类。
随着人工智能技术和自动化技术的发展,工业机器人的分类也将会越来越丰富和详细。
对工业机器人的理解工业机器人是一种高度先进的自动化设备,用于在工业生产中执行各种繁重、危险或重复性任务。
它们由多个关节和传感器组成,可以根据预先设定的程序进行操作和控制。
工业机器人在提高生产效率、保障生产安全和提升产品质量等方面发挥着重要作用。
下面将从技术发展、应用范围和未来前景几个方面对工业机器人的理解进行探讨。
1. 技术发展工业机器人的发展经历了多个阶段。
早期的工业机器人主要用于简单的重复性任务,如搬运、焊接和装配等。
随着科技的不断进步,机器人技术也得到了巨大的发展。
机器人的关节和传感器越来越先进,智能化程度也有所提高。
例如,一些机器人可以根据环境变化进行自主决策,适应不同的工作场景。
此外,机器人的故障排查和维护也变得更加简单高效,提高了设备的可靠性和稳定性。
2. 应用范围工业机器人广泛应用于各个领域的生产制造过程中。
首先,机器人在汽车制造业中扮演着重要的角色。
它们可以完成汽车组装、喷涂、焊接等工作,提高了生产效率和产品质量。
其次,机器人在电子设备制造和半导体行业中也得到了广泛应用。
在这些行业,机器人可以进行精细的组装和检测工作,提高了生产效率和产品的一致性。
此外,机器人还在食品加工、医药制造等行业中发挥着重要作用。
它们可以提高生产效率,减少人为操作带来的风险,并确保产品的卫生和质量。
3. 未来前景随着科技的进一步发展,工业机器人在未来将有更广阔的应用前景。
首先,随着人工智能和机器学习的发展,机器人将具备更强大的自主决策和学习能力。
它们可以根据环境变化和任务需求进行智能调整,甚至能够与人类进行协同工作。
其次,机器人将越来越符合人体工程学,更加灵活和高效地完成各种任务。
例如,柔性机器人可以根据需要改变形状和结构,适应不同的工作环境。
此外,机器人在环保领域也将发挥重要作用。
例如,在减少能源消耗、减排和废物处理等方面,机器人可以提供更好的解决方案。
总结而言,工业机器人是一种自动化设备,具备高度智能化和灵活性,并广泛应用于各个领域的生产制造过程中。
1、工业机器人的定义:是一种能自动控制、可重复编程、多功能、多自由度的操作机,能够搬运材料,工件或者操持工具来完成各种作业。
2、工业机器人的四个特点:①拟人化:在机械结构上类似于人的手臂或者其他组织结构。
②通用性:可执行不同的作业任务,动作程序可按需求改变。
③独立性:完整的工业机器人系统在工作中可以不依赖于人的干预。
④智能性:具有不同程度的智能,⑤可编程性3、工业机器人的分类:①按结构运动形式分类②按运动控制方式分类③按机器人的性能指标分类④按程序输入方式分类⑤按发展程度分类4、按运动形式分类(1)直角坐标机器人(2)圆柱坐标机器人(3)球坐标机器人(4)多关节型机器人(水平多关节、垂直多关节)(5) 并联机器人(串联机器人一条传动链)5、工业机器人的应用:搬运、焊接(点焊、弧焊、激光)、涂装、(球型手腕、非球型手腕机器人)、装配、码垛、打磨6、刚体:在任何外力作用下,体积和形状都不发生改变的物体称为刚体。
7、空间直角坐标系:称为笛卡尔坐标系,它是以空间一点O为原点,建立三条两两相互垂直的数轴。
8、右手坐标系;三个轴的正方向符合右手规则,右手大拇指指向Z轴的正方向,食指指向X轴的正方向,中指指向Y轴的正方向。
9、自由度:是描述物体具有确定运动时所需要的独立运动参数的数目。
三维空间中描述位姿(位置和姿态)需要六个自由度,沿直角坐标系的平移和沿直角坐标系的旋转。
10、关节:是允许工业机器人机械臂各零件之间发生相对运动的机构,是两构件直接接触并能产生相对晕的的可动连接。
11、连杆:是工业机器人机械臂上被相邻两关节分开的部分,是保持各关节间固定关系的刚体,是机械结构中分别于主动和从动构件交接以传动运动和力的杆件。
作用:是将一种运动形式转变为另一种运动形式。
12、转动关节:转动关节又称为转动副,是连续两个连杆的组件中的一件相对于另一件绕固定轴线转动的关节,两个连杆之间做相对转动。
可分为回转关节和摆动关节13、回装关节:两连杆相对运动的转动轴线与连杆的纵轴线。