南京理工大学科技成果——全自主带电作业机器人系统
- 格式:docx
- 大小:15.43 KB
- 文档页数:1

基于力反馈的带电作业机器人智能交互控制系统的开题报告一、问题的提出与研究背景作为一种新型的智能制造设备,机器人广泛应用于生产、军事、医疗等领域。
其中,带电作业机器人在核电站等高辐射场环境中具有广阔的应用前景,但是由于其特殊的工作环境和对操作者的安全要求极高,传统的控制方法已经无法满足其应用需求。
为了解决此类机器人在作业过程中产生的安全隐患和操作者的生命安全 problem,在机器人的操作过程中需要引入力反馈技术,通过感知机器人的工作负载和力传感器来控制机器人的运动,从而实现对机器人的精准控制。
二、研究目标与内容基于力反馈的带电作业机器人智能交互控制系统是本文的研究目标。
研究内容主要包括以下几个方面:1. 带电作业机器人的控制基础:基于机器人学和控制理论来实现带电作业机器人的运动学和动力学建模。
2. 力反馈传感器的设计与优化:研究不同类型力反馈传感器的设计和优化,使用精准的力传感器来感知机器人的工作负载和其他信息。
3. 控制算法的研究和优化:设计一种高效的控制算法,实现对机器人的实时控制和精确调节,保障机器人的安全和稳定。
4. 机器人的智能交互:将基于力反馈的控制技术与机器人智能交互进行结合,使机器人能够根据实时的反馈信息做出智能决策。
5. 测试与验证:在实际的带电作业环境中进行机器人的测试和验证,评估系统的性能和效果。
三、研究意义随着工业4.0时代的到来,机器人技术普及和应用的速度持续加快,尤其在核电等高辐射场领域,注重安全的带电作业机器人也逐渐成为主流。
因此,研究基于力反馈的智能交互控制系统,在机器人安全性、性能等方面的优化和提升,将具有重要的理论和实际应用意义。
四、论文的研究方法与步骤本研究将采用实验室仿真、理论研究和实际场景实验等多种研究方法,具体步骤如下:1. 系统需求分析:对带电作业机器人的应用场景和控制需求进行需求分析。
2. 机器人建模和力反馈传感器的设计与优化:建立带电作业机器人的动力学和模型,研究不同类型的力反馈传感器的设计和优化。

0 引言随着社会经济的发展和人民生活水平的提高,电力需求量不断增加。
同时,人们对供电可靠性的要求也越来越高。
在这种背景下,不停电作业技术成为电力系统中不可或缺的一部分。
然而,传统的不停电作业方式存在很多问题,如操作人员的安全风险高、工作效率低等。
因此,如何提高不停电作业的效率和安全性成为一个亟待解决的问题。
近年来,随着机器人技术的不断发展,配网作业机器人逐渐成为一种新的解决方案。
本文将对国内外配网作业机器人的应用情况进行剖析,分析其优缺点,并预测未来发展趋势。
1 国外配网作业机器人应用场景国外早期开展的配网带电作业机器人的研究主要集中在机器人本体的设计和研制方面。
普遍使用操作手柄远程遥控操作,控制机器人进行空中作业。
1.1 美国配网带电作业机器人应用情况图1展示的是美国Kraft 公司与美国电力研究所(EPRI)、西南研究所、ABChance 公司以及费城电气公司合作的输电网带电作业机器人“TOMCAT”。
这是一种能够在电压超过一百万伏的输电线路上工作的带电作业机器人。
主体用的是Kraft 公司生产的6自由度液压单机械臂,侧边有多视角视像头,用于辅助操作人员远程观察。
但是单个机械臂很大程度上制约了该机器人的作业功能种类。
美国太平洋天然气和电力公司(PG&E)的空中集成机器人(AIR)平台同样配备了两个用于配电线工作的KraftGrips 力反馈机械臂,操作员被隔离并免受高压和天气的影响。
1.2 加拿大配网带电作业机器人应用情况加拿大魁北克水电公司于20世纪90年代研发了双液压臂带电作业遥控机器人系统,用于25kV 电压的架空配电线路的带电维护[1],如图2所示。
开发思路与上述机器人基本相同,同时做了系统的升级。
开发团队在雨中进行了50kV 线路下进行作业测试,工作效率约为人工的70%。
液压臂分别是PUMA760和SarcosGRLA,平台上方还有一个辅助臂协助作业[2]。
操作人员仍需将机器人上升至高空,在驾驶舱内控制液压双臂机器人进行近距离操作。

南京理工大学科技成果——轻型机械臂关节及移动
机器人/机械臂复合系统
成果简介:
智能移动机器人/机械手系统(IM2S)主要包含无人自主移动机器人(平台)、7自由度轻型灵巧机械臂(手)、多智能传感器(视觉、激光、GPS、惯导等)、智能控制系统以及无线通讯等模块。
技术指标:
该系统拥有无人自主机器人的复杂地形地面移动能力、信息感知侦查能力、周围环境可视化及三维重建、基于网络人遥操作及自主控制协同能力,以及机械臂(手)的三维空间灵活准确运动能力、携带载荷完成各种任务能力。
项目水平:国际先进
成熟程度:样机
合作方式:合作开发、技术转让、技术入股。
南京理工大学科技成果——弧焊机器人智能化离线
编程系统
成果简介:
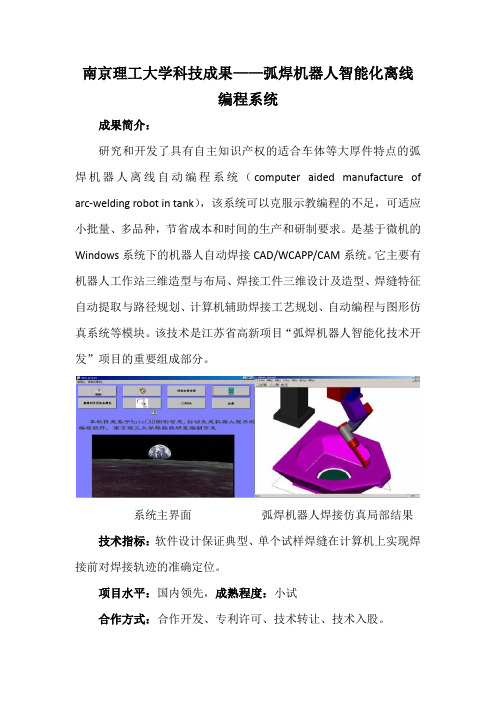
研究和开发了具有自主知识产权的适合车体等大厚件特点的弧焊机器人离线自动编程系统(computer aided manufacture of arc-welding robot in tank),该系统可以克服示教编程的不足,可适应小批量、多品种,节省成本和时间的生产和研制要求。
是基于微机的Windows系统下的机器人自动焊接CAD/WCAPP/CAM系统。
它主要有机器人工作站三维造型与布局、焊接工件三维设计及造型、焊缝特征自动提取与路径规划、计算机辅助焊接工艺规划、自动编程与图形仿真系统等模块。
该技术是江苏省高新项目“弧焊机器人智能化技术开发”项目的重要组成部分。
系统主界面弧焊机器人焊接仿真局部结果技术指标:软件设计保证典型、单个试样焊缝在计算机上实现焊接前对焊接轨迹的准确定位。
项目水平:国内领先,成熟程度:小试
合作方式:合作开发、专利许可、技术转让、技术入股。
作者: 徐善军[1,2];夏益青[1,2];杜婧[1,2];杨冰[1,2];汤潇[1,2]
作者机构: [1]北京国电富通科技发展有限责任公司,北京100070;[2]南瑞集团有限公司/国网电力科学研究院有限公司/国电南瑞科技股份有限公司,江苏南京211106
出版物刊名: 科技创新与应用
页码: 31-33页
年卷期: 2020年 第4期
主题词: 带电作业机器人;人机协同;绝缘防护
摘要:为满足国内10kV配网带电线路带电作业的要求,研制了高压带电作业机器人系统,包括机器人子系统和作业人员平台子系统等两大部分组成,可最大限度满足带电作业要求。
该机器人系统已在实际带电线路上完成带电接火作业,极大地降低了作业人员的劳动强度和保障了作业人员的安全,满足了现阶段带电作业的要求。

南京理工大学科技成果——仿生行走机器人设计与开发
成果简介:
仿生行走机器人模仿生物行走方式,能在自然环境的复杂地形中自如行走移动,完成轮式和履带式机器人难以完成的任务。
仿生行走机器人适合在室内或野外作业,执行各种移动任务,能广泛应用于特种工业生产物流、野外旅游交通工具、救灾抢险等领域。
主要特点:
1、应用仿生设计技术,使机器人的行走更平稳和更可靠。
2、采用全生命周期的现代设计方法,使产品具有良好的环境适应性。
3、可以通过网络实现远程遥控机器人执行各种作业任务。
技术指标:
1、平均机动速度:≥0.2m/s;
2、行走能力:野外各种复杂地面;
3、操作方式:遥控或自主移动;
4、动力特性:电池、太阳能或内燃机。
项目水平:国际先进,成熟程度:设计
合作方式:合作开发、技术转让,技术入股。
作为一所以理工科见长的大学的学生,南京理工大学的学子们一直对机器人抱有浓厚的兴趣。
在各类世界级、国家级的机器人比赛中都能看到南京理工大学学子设计并制造出的优秀作品。
区别与其他学校,机器人的设计和制作不在是个别优秀同学的“课后甜点”而是逐步发展成为全校同学的兴趣所在。
每年一度的校机器人大赛,更是面向全校同学开展选拔,有兴趣的同学都可以参与其中。
在刚刚结束的一届“中兴杯”机器人大赛上共有69支队伍,超过200名同学报名参加。
经过预赛、复试和决赛的层层选拔,最终有14支队伍进入决赛并成功设计完成属于自己的机器人。
对于机器人的设计制作,学校也给予了大力的支持。
学校有专门的机器人制作方面的指导老师和专用机器人工作室,同时有设备齐全工程训练中心作为技术后援,从软件和硬件两方面确保了机器人制作的创新性和实际操作性。
南京理工大学科技成果——大型储罐自动检测
机器人
成果简介:
该机器人主要用于大型储罐的自动化检测,也可用于化工反应罐、钢塔、大型风力发电机高塔、移动通讯发射塔等大型钢结构的检测。
根据检测要求搭载不同的设备,可以对结构进行近距离视频观察、近距离照相、超声测厚、超声扫描及传感器的安装等监测工作。
技术指标:
四轮驱动,差动式转向;
悬磁吸附,自重小于3.5kg;
爬行速度:大于5米/分钟;
最大负载:大于10kg;
有线或无线控制。
项目水平:国际先进
成熟程度:产业化
合作方式:合作开发、技术转让、技术入股。
配网带电作业机器人系统的设计摘要:配网带电作业机器人可使操作人员远离危险环境,保障人员安全,减轻操作人员劳动强度,提高带电作业工作效率,具有广阔的应用前景。
为了提高配网带电作业的安全性和作业效率,设计配网带电作业机器人系统,包括主从遥操作液压机械臂、控制系统、带电作业工具系统、绝缘防护系统和绝缘斗臂车等,描述其特有的结构、技术参数和工作原理。
采用主从位置闭环随动控制,主从手同构,主手具备力反馈,提高操作的灵活性和工作效率。
在10kV配网带电线路进行试验,验证了设计的合理性和优越性。
关键词:配网;带电作业;机器人;设计引言带电作业是指在高压电气设备上不停电进行检修、测试的一种作业方法,是电网设备检测、检修维护和改造的重要手段和方法,是保证电力系统可靠稳定运行的重要技术措施。
由于10kV配电线路中相间距、相对地距离的限制,检修中发生人员触电伤亡的事故率相对其他作业较高。
针对目前带电作业主要仍是人工操作的实际情况和10kV配电线路带电作业“机器人换人”需求,由主从遥操作液压机械臂、智能感知系统、带电作业机器人工具系统、绝缘防护系统组成的配网带电作业主从遥操作液压机械臂在配网带电领域有广阔的应用空间和实际意义,不仅可以使操作人员远离危险系数高、劳动强度大的工作,从而有效避免带电作业时人员伤亡事故的发生,提高带电作业的安全性和作业效1配网带电作业机器人简介在传统的配网带电作业中,操作人员需要站在绝缘升降斗臂车上,利用绝缘工具,例如绝缘杆,绝缘手套进行手动作业。
在大多数带电作业时,应保持对地不少于0.4m,对相邻导线不少于0.6m的安全距离,使用绝缘杆作业法更是加大了作业难度。
近年来尽管针对配网带电作业操作制订了一系列规范性技术准则和作业规范,但由于任务量大、危险系数高、环境恶劣,人员伤亡事故还是时有发生。
为此,早在20世纪80、90年代,全球就开始了配网带电作业机器人的研发。
典型的遥操作机器人包括日本九州电力公司开发的PhaseⅠ和PhaseⅡ系列机器人,1990年西班牙马德里理工大学开发的ROBTET液压驱动机器人,以及山东鲁能智能公司开发的液压遥操作机器人。
配电带电作业机器人系统的研制何祖彬,戚挥,杨立玺,王安高(凯里供电局,凯里 556000)摘要:为了适应10KV配电线路带电作业的要求,研制了一台能够最大限度的满足现场作业环境要求的高压带电作业机器人,包括主从操作机械臂、机器人专用升降系统、绝缘工具系统、绝缘防护系统四部分。
并在10KV配电线路上进行了试验,机械臂操作灵活,绝缘防护方法设计合理,防护性能可靠,操作简单方便。
工具系统采用无线遥控方式,可以代替人工完成作业频率较高的带电断线、带电接线等作业任务,减轻了作业人员的劳动强度,使作业人员与高压电场完全隔离,最大限度的保证作业人员的安全。
关键字:高压带电作业机器人;主从式机械臂;带电作业工具;高空作业车Design on the Live Working Robot SystemZHAO Yu-liang1, SUN Da-qing1,LI Jian2 , LI Yun-chang2(1.Shandong Electric Power Research Institute, Jinan 250002, China;2.SHANDONG LUNENG INTELLIGENCE TECHNOLOGY CO.,LTD 250002)Abstract:For 10KV distribution line request, this paper researches a line working robot for present working. This system includes master-slave manipulators, robot lift platform, insulating tool system, insulating protective system. And actual application shows the validity and feasibility of the designed architecture. Manipulator is controlled easily and insulating protective method is designed reasonably. The tool system uses wireless control and completes cutting line, wiring. The efficiency is greatly raised and the intensity of labor is decreased. The safety is greatly boosted for working persons.Keywords:live working robot; master-slave manipulator; tools for live working; vehicle-mounted mobile elevating work platform0 引言我国社会经济不断发展、人民生活质量不断提高,配电网络要实现不间断输电,就必须开展带电作业。
南京理工大学科技成果——全自主带电作业机器人系统
成果简介:
针对目前机器人无法在非结构化环境下完成自主带电作业任务的现状,将视觉图像处理技术、遥操作技术、虚拟现实技术、人机交互技术、多级绝缘防护技术等与机器人技术相融合,研发完成了更加自主的带电作业机器人系统,可实现在非结构化环境下完成高压线路的带电更换避雷器、拆接引线等作业任务,有效地代替人工作业,提高作业的安全性和效率,满足机器人配电网带电作业的要求,提高电网的运行质量的同时,还可减少供电系统中的人员投入,降低劳动人员成本,使经济效益和社会效益得到最大化。
技术指标:
可自主完成复杂的更换避雷器以及接搭引线等作业任务。
项目水平:国内领先
成熟程度:样机
合作方式:合作开发。