基于Matlab和模糊PID的汽车巡航控制系统设计_仇成群
- 格式:pdf
- 大小:2.02 MB
- 文档页数:6
基于MATLAB模糊自适应PID 控制器的设计The fuzzy PID controller and‘its simulation Abstract:This paper discusses the design of fuzzy PID controller and he method of realization using MATLAB software.The result of simulation in MATLAB/Simulink indicates that the controlle r evidently improves the dynamic property of control system.The controlle r is easily realized and applied in engineering.First, let's take a look at how the PID controller works in variable (e) represents the tracking error, the difference between the desired input value (R) and the actual output (Y). This error signal (e) will be sent to the PID controller, and the controller computes both the derivative and the integral of this error signal. The signal (u) just past the controller is now equal to the proportional gain (Kp) times the magnitude of the error plus the integral gain (Ki) times the integral of the error plus the derivative gain (Kd) times the derivativeof the error.摘要: 基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整摘要: 基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整定和自调整。
基于LabVlEW的直流伺服电机模糊PID控制系统LabVIEW-BasedFuzzyPIDControlSystemofDCServo-motor昊占涛-,z张桂香2(1湖南大学国家高效磨黼I程技术研究中心,长沙410082;2湖南大学机械与汽车工程学院,长沙410082)攘娶:论述了一种基予模糍PID算法的直流镯服电极控制系统,介缁了模糨PID算法及模糊控裁规鲻。
系统采用图形化的编程潜言LabVIEW,软件交互界面友好。
试验结果表明,采用该模糊PID控制器的系统能克服常规PID控制器的弊端,控制品质好,算法简单,具有实际应用价值。
关键词:直流伺服电视模糊控铡PIDLabVIEWAbstract:TheDCservo-motorcontrolsystembasedonfuzzyPIDalgorithmisintroduced。
ThefussyPIDalgorithmandtheregulationoffuzzycontrolarepresented.Thesystemhasafinesoftwareinterface,whichisrealizedbyLabVlEW。
TheresultsshowthatthefussyPIDcontrolsystemcanovercomethedrawbacksoftraditionalPIDcontroller,whichhasapracticalvalueofapplicationwithgoodcontrolperformanceandsimplealgorithm.Keywords:DCservo-motorfuzzycontrolPIDLabVIEW0引言直流伺服电视爨祷响应侠、低速平稳住好、潺速范围宽等特点,常用于实现精密谪速和位置控制的随动系统中,在工业、国防和民耀等领域内褥到广泛应瘸脚;所以,会理选择鸯漉饲服电机的控制方法。
X寸予充分发撂盔流箍鞭电梳的工作蔑麓鸯着积极的作用。
模糊PID在汽车防锁死系统(ABS)上的控制优化及仿真研究蒋科军;刘成晔;张兰春【摘要】在Matlab/Simulink环境内建立了汽车ABS动力学模型,引入S函数对模糊PID控制过程进行优化,并对该控制方法进行了仿真研究,研究结果表明:基于S 函数的模糊PID控制更加灵活,汽车ABS在基于S函数的模糊PID控制下,制动距离较常规模糊PID控制短,虽然基于S函数的模糊PID控制在后期有明显颤振,但控制参数具有明显的收敛性.【期刊名称】《科学技术与工程》【年(卷),期】2013(013)031【总页数】5页(P9450-9453,9459)【关键词】汽车ABS;模糊PID控制;S函数;优化;仿真【作者】蒋科军;刘成晔;张兰春【作者单位】江苏理工学院汽车与交通工程学院,常州213001;江苏理工学院汽车与交通工程学院,常州213001;江苏理工学院汽车与交通工程学院,常州213001【正文语种】中文【中图分类】U463.526汽车防抱死制动系统ABS(anti-lock braking system)是目前比较普及的汽车主动安全技术,它能够显著提高汽车制动时方向稳定性和转向操纵能力,缩短汽车制动距离。
据文献[1]统计,汽车ABS技术的应用能使交通事故减少25%以上。
基于ABS技术对汽车安全的巨大作用,当前对汽车ABS的研究和改良仍是国内外汽车研究的重要课题,如郑太雄等[2]、齐志权等[3]研究汽车 ABS参考车速的确定方法,分析不同方法确定的参考车速对汽车ABS 控制效果的影响;李伯全等[4]、李熙亚等[5]研究汽车ABS的路面自动识别技术,通过采用智能控制和自适应技术来提升汽车ABS的性能;Peng等[6]研究汽车ABS与其他汽车底盘系统的联合控制。
本文以汽车ABS的控制为研究课题,在模糊PID控制中引入S 函数,希望通过S函数的灵活性和多层次性,提高汽车ABS的制动效果。
1 汽车ABS动力学模型1.1 汽车ABS工作原理汽车制动时(忽略空气阻力),轮胎与路面间的式(1)中,λ为车轮滑移率;VC为车辆速度;VT为车轮边缘的线速度;ω为车轮角速度;R为车轮滚动半径。
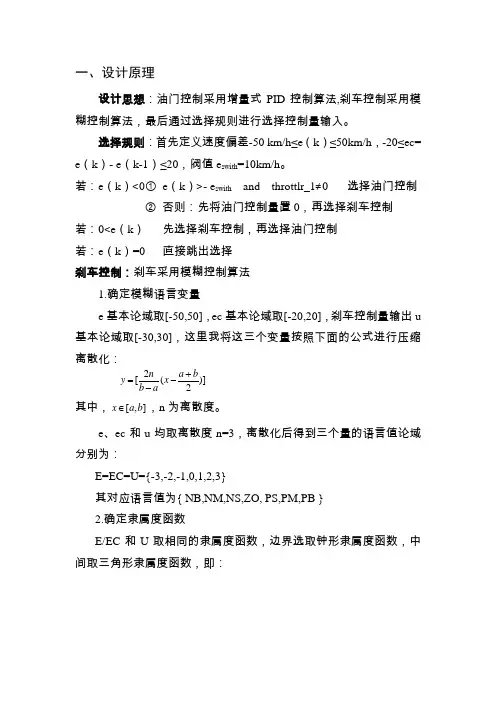
一、设计原理设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。
选择规则:首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec= e (k )- e (k-1)≤20,阀值e swith =10km/h 。
若:e (k )<0① e (k )>- e swith and throttlr_1≠0 选择油门控制② 否则:先将油门控制量置0,再选择刹车控制 若:0<e (k ) 先选择刹车控制,再选择油门控制 若:e (k )=0 直接跳出选择 刹车控制:刹车采用模糊控制算法1.确定模糊语言变量e 基本论域取[-50,50],ec 基本论域取[-20,20],刹车控制量输出u 基本论域取[-30,30],这里我将这三个变量按照下面的公式进行压缩离散化:)]2(2[ba x ab n y +--= 其中,],[b a x ∈,n 为离散度。
e 、ec 和u 均取离散度n=3,离散化后得到三个量的语言值论域分别为:E=EC=U={-3,-2,-1,0,1,2,3}其对应语言值为{ NB,NM,NS,ZO, PS,PM,PB } 2.确定隶属度函数E/EC 和U 取相同的隶属度函数,边界选取钟形隶属度函数,中间取三角形隶属度函数,即:E EC U(,5,1)(,3,2,0)(,3,1,1)u (,2,0,2)(,1,1,3)(,0,2,3)(,1,5)g x trig x trig x trig x trig x trig x g x ∧∧--⎧⎪--⎪⎪--⎪=-⎨⎪-⎪⎪⎪⎩说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略。
实际EC 和E 输入值若超出论域范围,则取相应的端点值。
3.模糊控制规则由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表:表1:E/EC 和U 语言值隶属度向量表设置模糊规则库如下表:表2:模糊规则表3.模糊推理由模糊规则表3可以知道输入E 与EC 和输出U 的模糊关系,这里我取两个例子做模糊推理如下:if (E is NB) and (EC is NM) then (U is PB)那么他的模糊关系子矩阵为:1211U EC E R R R R ⨯⨯=其中,711)0,,0,5.0,1(0⨯== P R E ,即表1中NB 对应行向量,同理可以得到,712)0,,0,5.0,1,0(1⨯== P R EC , 711)0,,0,5.0,1(0⨯== P R U77210000000000005.05.00005.010)0,,0,5.0,1,0()0,,0,5.0,1(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯TEC E R R 49121)0,,0,5.0,5.0,0,0,0,0,0,5.0,1,0(⨯= EC E R7491211000000005.05.00005.0100000)0,,0,5.0,1()0,,5.0,1,0(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯=TU EC E R R R if (E is NB or NM) and (EC is NB) then (U is PB)21211()E E EC U R R R R R =⨯⨯,结果略。
基于模糊控制的车辆自适应巡航系统设计
赵秀春;徐国凯;张涛;葛平淑
【期刊名称】《大连民族学院学报》
【年(卷),期】2013(15)5
【摘要】在定速巡航的基础上,结合跟车巡航功能,设计了一种自适应巡航分层控制系统,可根据行驶工况自动切换其工作模式,实现巡航系统的智能化.该系统综合考虑了跟车系统中前车车速、加速度、车距等各种因素,利用模糊控制技术的优点,提高控制系统的性能.利用Matlab仿真及硬件在环技术进行实验研究,结果表明该控制系统能够实现巡航模式的自适应切换,并且具有较高的控制精度和理想的巡航性能.【总页数】4页(P508-511)
【作者】赵秀春;徐国凯;张涛;葛平淑
【作者单位】大连民族学院机电信息工程学院辽宁大连116605;大连民族学院机电信息工程学院辽宁大连116605;大连民族学院机电信息工程学院辽宁大连116605;大连民族学院机电信息工程学院辽宁大连116605
【正文语种】中文
【中图分类】U463.6
【相关文献】
1.基于模糊控制的车辆自适应巡航研究及仿真 [J], 陈荣章;张靓超
2.自动驾驶车辆自适应巡航模糊控制研究 [J], 周佳扬; 张艳涛
3.基于滑模控制的车辆自适应巡航系统设计 [J], 张立发;赵秀春;高天一
4.基于滑模控制的车辆自适应巡航系统设计 [J], 张立发;赵秀春;高天一
5.基于模糊控制的汽车自适应巡航系统设计 [J], 贺翠华
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的模糊PID控制系统的设计与仿真作者:王超蒋平来源:《电子世界》2013年第04期【摘要】在传统的PID控制基础上,本文介绍了一种基于PID模糊控制的混合型控制,通过MATLAB&Simulink软件和模糊逻辑工具箱设计控制系统结构模型.仿真结果证明,该控制方法具有更优的性能。
【关键词】模糊PID控制;MATLAB仿真1.引言在传统的控制方法中,PID控制凭借其算法简单、精度高、可靠性强、技术成熟、应用广泛的优点脱颖而出,占据了工业控制系统80%以上的份额;然而随着现代控制系统越来越复杂,精度要求也越来越高,传统、单一的控制策略已经无法满足设计性能的要求,同时,随着电子技术和计算机的发展,各种新兴的智能算法也不断涌现,将传统算法和智能算法相结合,成为现代控制系统策略选择的趋势。
作为智能控制中最重要且最有效的手段之一的模糊控制,在应对复杂系统的非线性和时变特征时有着较好的表现,因此越来越多的被应用到工程实践中,并已取得了不俗的成绩。
本文介绍的是基于传统的PID控制和现代控制理论中的智能模糊控制相结合的一种控制方法,用MATLAB&Simulink软件和模糊逻辑工具箱设计控制系统结构模型,并通过仿真结果证明该控制方法具有更优的性能。
2.PID模糊控制系统的结构3.利用MATLAB&Simulink软件进行控制仿真基于现代控制理论的模糊控制,内容比较抽象,理论性较强,比较枯燥。
另外,模糊控制是模糊集合理论、模糊语言变量以及模糊逻辑推理为基础的一种计算机控制,它处理的问题可能难以靠解析求解,需要采用复杂的数值计算方法,采用软件编程,不仅工作量大,而且过程繁杂,大大制约了控制方法的性能验证和工程实现。
MATLAB&simulink是MathWorks公司推出的当今国际控制界最为流行的面向工程和科学计算的高级语言,是公认的最为灵活和有效的仿真软件。
而且随着智能控制的迅速推广应用,MathWorks公司已经添加了智能逻辑控制工具箱,其中包括模糊控制工具箱、神经网络控制箱等热门工具。
基于Matlab和模糊PID的汽车巡航控制系统设计一、本文概述随着汽车工业的快速发展和智能驾驶技术的不断进步,汽车巡航控制系统作为提高驾驶安全性和舒适性的重要手段,越来越受到人们的关注。
传统的巡航控制系统主要依赖于PID(比例-积分-微分)控制算法,虽然在一定程度上能够实现车速的稳定控制,但在面对复杂多变的道路环境和驾驶员的个性化需求时,其性能往往难以达到最优。
为了解决这个问题,本文将研究并设计一种基于Matlab和模糊PID的汽车巡航控制系统。
该系统将结合传统PID控制算法的稳定性和模糊控制算法的灵活性,通过Matlab进行建模与仿真,实现对汽车巡航速度的更精确、更智能的控制。
本文将介绍汽车巡航控制系统的基本原理和PID控制算法的基本原理;详细阐述模糊PID控制算法的设计思路和实现方法;然后,通过Matlab进行仿真实验,验证所设计的模糊PID控制算法在汽车巡航控制系统中的有效性和优越性;对本文的研究成果进行总结,并展望未来的研究方向和应用前景。
本文的研究不仅有助于提升汽车巡航控制系统的性能,同时也为智能驾驶技术的发展提供了新的思路和方法。
二、汽车巡航控制系统概述汽车巡航控制系统是一种先进的驾驶辅助系统,旨在通过自动调节发动机的油门或制动系统,使车辆能够在驾驶员设定的速度下稳定行驶,而无需持续踩踏油门踏板。
这种系统不仅可以提高驾驶的舒适性,减少驾驶员的疲劳感,而且在长途驾驶或高速公路上行驶时,能有效提高行车安全性。
巡航控制系统的核心在于其控制策略,它需要根据车辆当前的速度、加速度、道路条件以及驾驶员的设定速度等多个因素,进行实时计算和判断,以决定如何调整发动机的输出或制动力度。
传统的PID (比例-积分-微分)控制器因其简单性和有效性,在巡航控制系统中得到了广泛应用。
然而,由于实际驾驶环境的复杂性和不确定性,传统的PID控制器往往难以应对各种突发情况,如突然出现的障碍物、道路坡度变化等。
为了解决这个问题,近年来,基于模糊逻辑的控制器被引入到汽车巡航控制系统中。
1910.16638/ki.1671-7988.2020.24.007基于模糊PID 的汽车巡航控制系统研究*张宝玉(江苏食品药品职业技术学院,江苏 淮安 223001)摘 要:汽车巡航控制系统(以下简称“CCS ”)可以降低汽车排气污染,文章为提高汽车巡航的精度和稳定性,在研究模糊PID 控制方法基础上,结合Matlab/Simulink 对汽车巡航模糊控制进行了建模,为后续仿真工作以及结构优化提供了可靠保障。
关键词:模糊巡航;车辆动力学系统;建模;响应速度中图分类号:U495 文献标识码:A 文章编号:1671-7988(2020)24-19-03Research on Automobile Cruise Control System Based on Fuzzy PID *Zhang Baoyu(Jiangsu Food & Pharmaceutical Science College, Jiangsu Huai ’an 223001)Abstract: Automobile cruise control system (Shorthand "CCS") can reduce automobile exhaust pollution. In this paper, in order to improve the accuracy and stability of automobile cruise, based on the study of fuzzy PID control method, com -bined with Matlab/Simulink to model the automobile cruise fuzzy control, Providing a reliable guarantee for subsequent simulation work and structural optimization.Keywords: Fuzzy cruise; Vehicle dynamics system; Modeling; Response speed CLC NO.: U495 Document Code: A Article ID: 1671-7988(2020)24-19-031 汽车巡航控制原理汽车巡航系统是一个典型的闭环反馈控制系统,其原理如下图1所示。
基于matlabsimulink的pid控制器设计1.引言1.1 概述概述部分:PID控制器是一种常用的控制算法,它通过不断地调整系统的输出来使其尽量接近所期望的目标值。
在工业控制领域,PID控制器被广泛应用于各种工艺过程和自动化系统中。
本文将以MATLAB/Simulink为工具,探讨基于PID控制器的设计方法。
PID控制器以其简单易实现、稳定性好的特点,成为许多控制系统的首选。
在文章的正文部分,我们将对PID控制器的基本原理进行详细介绍,并结合MATLAB/Simulink的应用,展示如何使用这一工具来设计和实现PID控制器。
在控制系统设计中,PID控制器通过测量系统的误差,即期望输出值与实际输出值之间的差异,并根据三个控制参数:比例项(Proportional)、积分项(Integral)和微分项(Derivative)来调整系统的输出。
比例项控制系统的响应速度,积分项消除系统的稳态误差,微分项抑制系统的震荡。
MATLAB/Simulink作为一款功能强大的仿真软件,提供了丰富的控制系统设计工具。
它不仅可以帮助我们直观地理解PID控制器的工作原理,还可以实时地模拟和分析系统的响应。
通过使用MATLAB/Simulink,我们可以轻松地进行PID控制器参数调整、系统性能评估和控制算法的优化。
总之,本文旨在介绍基于MATLAB/Simulink的PID控制器设计方法,通过理论介绍和实例演示,帮助读者深入理解PID控制器的原理和应用,并为读者在实际工程项目中设计和实施PID控制器提供参考。
在结论部分,我们将总结所得结论,并对未来进一步研究的方向进行展望。
文章结构部分的内容可以描述文章的整体架构和各个部分的内容大纲。
以下是对文章1.2部分的内容补充:1.2 文章结构本文主要由以下几个部分构成:第一部分是引言部分,包括概述、文章结构和目的等内容。
在概述中,将简要介绍PID控制器在自动控制领域的重要性和应用背景。
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
最优控制与智能控制基础文献总结报告基于MATLAB的模糊PID控制器的设计学生姓名:陈泽少班级学号:5090111任课教师:段洪君提交日期:成绩:1课题背景、意义及发展现状随着越来越多的新型自动控制应用于实践,其控制理论的发展也经历了经典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器、传感器、变送器、执行机构、输入输出接口。
控制器的输出经过输出接口、执行机构加到被控系统上;控制系统的被控量,经过传感器、变送器通过输入接口送到控制器。
不同的控制系统,传感器、变送器、执行机构是不一样的。
比如压力控制系统要采用压力传感器;电加热控制系统要采用温度传感器[1]。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用。
比如,工业生产过程中,对于生产装置的温度、压力、流量、液位等工艺变量常常要求维持在一定的数值上,或按一定的规律变化,以满足生产工艺的要求[2]。
PID控制器可以根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。
PID(比例积分微分)控制具有结构简单、稳定性能好、可靠性高等优点, 1word格式支持编辑,如有帮助欢迎下载支持。
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
尤其适用于可建立精确数学模型的控制系统。
而对于一些多变量、非线性、时滞的系统,传统的PID控制器并不能达到预期的效果。
随着模糊数学的发展,模糊控制的思想逐渐得到控制工程师们的重视,各种模糊控制器也应运而生。
而单纯的模糊控制器有其自身的缺陷—控制效果很粗糙、控制精度无法达到预期标准。
但利用传统的PID控制器和模糊控制器结合形成的模糊自适应的PID控制器可以弥补其缺陷;它将系统对应的误差和误差变化率反馈给模糊控制器进而确定相关参数,保证系统工作在最佳状态,实现优良的控制效果[3]。
收稿日期:2004-03-31第22卷 第9期计 算 机 仿 真2005年9月文章编号:1006-9348(2005)09-0242-03模糊自整定PID 控制器设计以及MATLAB 仿真分析肖奇军1,李胜勇2(1.肇庆学院电子信息工程系,广东肇庆526061;2.上海交通大学微纳米科学技术研究院,上海200030)摘要:为了解决液压控制的关键技术,该文针对时变、非线性的电液伺服系统提出了模糊自整定PID 控制器设计的思路,结合Simuiink 和模糊工具箱并进行仿真分析,该仿真模型具有结构简单、界面直观、便于修改等特点,根据PID 参数变化需要提出了模糊控制规则选取方法,给出了系统软、硬件实现方法,该系统具有操作方便、人机界面风格良好等优点。
使用仿真和实验相结合的方法获取最佳控制参数,通过仿真和实验结果可以看出这种算法的实用性和有效性。
关键词:模糊自整定;仿真分析;应用分析;电液伺服系统中图分类号:TP391.9 文献标识码:B Design and Simulation Analysis of Fuzzy Self -adaptive PID ControlXIAO Oi -jun 1,LI Sheng -yong 2(1.Dept.of Eiectronics Information Engineering ,Zhaoging University ,Zhaoging Guangdong 526061,China ;2.Institute of Micronanometer Science and Technoiogy Shanghai Jiaotong Univ.,Shanghai 200030,China )ABSTRACT :The paper puts forward the idea of fuzzy seif -adaptive PID controiier design aimed at the time -chan-ging and non -iinear eiectro -hydrauiic servo and the simuiation anaiysis combined with Simuiink and fuzzy tooibox.The simuiation possesses the characteristic of simpie construction ,direct interface and easy modification etc and ob-tains the way for fuzzy controi ruie seiection according to the need of PID parameter changing.It aiso provides the way for software and hardware reaiization.The system possesses the merit of convenient operation and good interface.It ob-tains the best parameter through simuiation combined with experience and from the simuiation resuit we can see the practicaiity and vaiidity of this controi method and soive the key technoiogy of hydrauiic controi.KEYWORDS :Fuzzy seif -adaptive ;Simuiation anaiysis ;Appiication anaiysis ;Eiectro -hydrauiic servo1 引言模糊控制一直是智能控制研究的热点,其应用水平代表着产品智能化水平,模糊控制以其控制简单、实现成本低廉、无需建立数学模型等独到的优点被广泛应用于家电等控制中,尤其是在时变、非线性的液压控制系统中得到广泛的应用。
基于LabVIEW和PIDNN的汽车巡航控制系统设计钱菲;仇成群【摘要】提出基于LabVIEW和PIDNN(神经网络)控制方法,以PID神经网络控制为基础,以车速传感器采集的车速信号和设定车速的差值作为输入量,使用实际车速作为输出量,结合LabVlEW建立汽车巡航控制系统模型,进行仿真,验证了系统的可行性良好.该系统超调量小,工作稳定,鲁棒性好,可以较好地满足汽车巡航系统的控制需求.【期刊名称】《机械工程师》【年(卷),期】2014(000)011【总页数】2页(P146-147)【关键词】LabVIEW;PIDNN;仿真【作者】钱菲;仇成群【作者单位】盐城师范学院物理科学与电子技术学院,江苏盐城224051;盐城师范学院物理科学与电子技术学院,江苏盐城224051【正文语种】中文【中图分类】TP2730 引言因国内汽车设计制造技术相对落后,对汽车巡航控制系统(Cruise Control System,缩写为CCS)的研究还不够成熟,巡航控制精度和稳定性都不高[1-3]。
1 PIDNN控制的巡航控制系统1.1 PID控制在汽车巡航控制中的运用当启动巡航系统时,车速传感器接受信息,通过数据采集,将信息传送给行车电脑电子控制单元(ECU)处理,调节发动机节气门开度,控制动力输出,经动轴传递给车轮,再经差速器将车速反馈回ECU[3-5]。
PID控制是比例-积分-微分控制,该控制是据汽车设定行驶与实际行驶车速之间的偏差,考虑各种状况,进而实现系统的不变参数的巡航控制。
被控对象的特性复杂时,常规PID很难实现有效控制[2-5]。
1.2 PIDNN控制系统的设计PIDNN(Proportional Integral Derivative Neural Network),是一种多层前向神经元网络。
结合巡航控制系统的原理以及PIDNN的特点,文中选用PIDNN控制的巡航系统使车速保持恒定,输入为巡航汽车的设定车速与实际车速的偏差值,巡航开始控制后,则启动制动控制模块,输出制动力矩,调节节气门开度。
车辆自适应巡航控制系统的模糊PID实现
张强;曲仕茹
【期刊名称】《汽车工程》
【年(卷),期】2008(030)007
【摘要】建立了适合于车辆自适应巡航控制系统精确的车辆纵向动力学模型,简化了自动变速器模型,采用混合模糊PID控制算法实现了车辆自适应巡航系统"定速"和"跟驰"两个控制目标.仿真结果表明,该控制算法具有响应速度快、超调量小、能够消除系统偏差等优点.
【总页数】4页(P569-572)
【作者】张强;曲仕茹
【作者单位】西北工业大学自动化学院,西安,710072;西北工业大学自动化学院,西安,710072
【正文语种】中文
【中图分类】U4
【相关文献】
1.车辆自适应巡航控制系统的建模与分层控制 [J], 张亮修;吴光强;郭晓晓
2.模糊PID控制器在自适应巡航控制系统中的应用 [J], 刘中海;何克忠
3.车辆自适应巡航控制系统的发展和应用前景 [J], 刘猛; 张丽萍
4.车辆自适应巡航控制系统的研究现状 [J], 刘猛; 张丽萍
5.考虑测量噪声的车辆自适应巡航控制系统纵向跟车研究 [J], 黄菊花;邹汉鹏;刘明春
因版权原因,仅展示原文概要,查看原文内容请购买。