1.6-1 矩阵的酉相似
- 格式:pdf
- 大小:1.86 MB
- 文档页数:27
线性代数中的酉矩阵理论线性代数是数学中的一个重要分支,研究向量空间及其线性映射的性质和结构。
其中,酉矩阵是线性代数中的一种特殊类型的矩阵,具有很多重要的性质和应用。
本文将探讨线性代数中酉矩阵的理论。
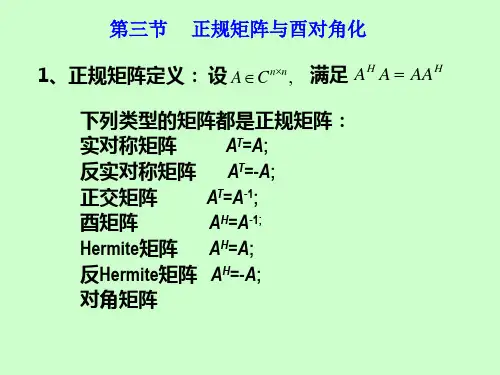
一、酉矩阵的定义与性质酉矩阵是指一个复矩阵,其共轭转置等于其逆矩阵,即对于一个n 阶酉矩阵U,满足以下条件:U*U^H = I,其中U*表示矩阵U的共轭转置,U^H表示矩阵U的转置。
酉矩阵的定义可以简单表达为U*U = I。
酉矩阵具有以下重要性质:1. 酉矩阵的行列式的模长等于1,即|det(U)| = 1。
这是因为酉矩阵的逆矩阵等于其共轭转置,所以行列式的值为1。
2. 酉矩阵的特征值的模长为1,即|λi| = 1。
这是因为酉矩阵具有正交对角化的性质,特征值对应的特征向量构成一组正交归一的基。
3. 酉矩阵的任意两行(或两列)是正交的。
设酉矩阵A的第i行为ai^T,第j行为aj^T,其中ai和aj分别为列向量,那么ai^T * aj = 0。
4. 酉矩阵的转置也是酉矩阵。
即如果U是酉矩阵,则U^T也是酉矩阵。
二、酉矩阵的应用酉矩阵在量子力学和信号处理等领域有广泛的应用。
1. 量子力学中的酉矩阵:量子力学中的态矢量表示为复向量,而量子系统的演化可以由酉矩阵描述。
在量子计算中,酉矩阵用于表示量子比特的操作。
2. 信号处理中的酉矩阵:信号处理领域中,酉矩阵用于表示信号变换的正交变换矩阵,如傅里叶变换和离散余弦变换等。
3. 几何旋转中的酉矩阵:二维和三维空间中的几何旋转可以由酉矩阵来表示,这是因为酉矩阵具有正交性质。
4. 线性方程组求解中的酉矩阵:酉矩阵用于线性方程组的求解,特别是在正交正交子空间的情况下,酉矩阵可以简化方程组的求解过程。
三、酉相似和酉相等在酉矩阵理论中,有两个重要的概念,即酉相似和酉相等。
1. 酉相似:如果一个矩阵A可以通过酉变换相似地变为矩阵B,即存在酉矩阵U,使得B = U^H * A * U,则矩阵A和B是酉相似的。
酉相似矩阵是矩阵理论中的一个重要概念,它描述了一种特殊的矩阵相似性。
在研究酉相似矩阵的性质和特点时,人们发现了一些有趣的结论,其中之一就是酉相似矩阵的元素之模的平方和相等的定理。
本文将从酉相似矩阵的定义和性质入手,逐步引入相关定理的证明,以便读者深入理解这一矩阵理论中的重要命题。
一、酉相似矩阵的定义1.1 酉相似矩阵的概念上线性代数中,矩阵的相似性是一个重要的概念。
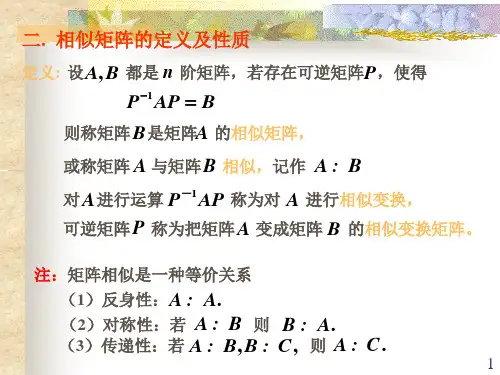
给定两个n阶矩阵A和B,如果存在一个可逆矩阵P,使得P^-1AP=B,那么就称矩阵B是矩阵A的相似矩阵,记作A∼B。
当P是酉矩阵(即P的转置等于P的逆,记作P^*)时,称B是A的酉相似矩阵,记作A≈B。
酉相似矩阵具有许多独特的性质,在物理学和工程学中经常被应用,因此深入研究酉相似矩阵的性质对于理解矩阵理论和应用有着重要意义。
1.2 酉相似矩阵的基本性质酉相似矩阵具有以下基本性质:(1)酉相似矩阵的相似关系是一种等价关系。
(2)酉相似矩阵的迹(矩阵对角元素之和)是相等的。
(3)酉相似矩阵的行列式的模是相等的。
以上是酉相似矩阵的定义和基本性质,接下来将讨论酉相似矩阵的元素之模的平方和相等的定理。
二、定理的表述定理:若A与B是酉相似矩阵,则A与B的元素之模的平方和相等,即∑|a_ij|^2 = ∑|b_ij|^2。
三、定理的证明3.1 酉相似矩阵的定义首先回顾一下酉相似矩阵的定义:若A与B是酉相似矩阵,则存在酉矩阵P使得P^*AP=B。
由于P是酉矩阵,因此有P^*P=I,其中I是单位矩阵。
根据酉相似矩阵的性质,A与B的迹和行列式的模是相等的。
3.2 矩阵元素之模的平方和相等的证明接下来我们来证明定理中的平方和相等的部分。
设A与B分别为n阶矩阵,其元素分别为a_ij和b_ij(1≤i,j≤n)。
则A与B的元素之模的平方和可表示为:∑|a_ij|^2 = |a_11|^2 + |a_12|^2 + ... + |a_nn|^2;∑|b_ij|^2 = |b_11|^2 + |b_12|^2 + ... + |b_nn|^2。
酉相似性与酉合同酉相似性和酉合同是量子力学中的重要概念,它们在量子信息科学和量子计算中起着关键作用。
本文将介绍酉相似性和酉合同的定义、性质以及它们在量子力学中的应用。
酉相似性和酉合同是描述量子系统中不同酉算符之间的关系的概念。
首先,我们来定义酉算符(Unitary Operator):对于一个线性算符U,如果满足U†U=UU†=I,其中†表示厄米共轭(Hermitian Conjugate),I 表示恒等算符(Identity Operator),则U是一个酉算符。
酉算符是保持量子态的范数不变的变换,它具有幺正性和可逆性。
1. 酉相似性酉相似性是指在一个给定的酉算符下,两个算符之间的关系。
设A和B是两个算符,如果存在一个酉算符U,使得A=UBU†,那么我们称B是相对于A在酉算符U下的酉相似形式。
酉相似性关系是一种等价关系,即自反性、对称性和传递性都成立。
酉相似性在量子力学中有广泛的应用。
例如,在量子信息科学中,我们通常需要对量子态进行变换,而酉相似性提供了一种便捷的方式。
通过寻找酉相似变换,我们可以将一个复杂的问题转化为一个简单的问题,从而简化计算和分析过程。
2. 酉合同酉合同是指具有相同酉相似形式的两个算符之间的关系。
设A和B是两个算符,如果存在一个酉算符U,使得A=UBU†和B=U†AU,那么我们称A和B是酉合同的。
酉合同是酉相似性关系的一种特殊情况。
酉合同在量子物理中有重要的应用。
例如,在量子态的演化过程中,我们常常需要寻找酉算符来描述系统的时间演化。
通过找到满足酉合同的算符,我们可以得到系统的酉相似形式,从而更好地理解和分析量子态的演化过程。
3. 应用举例酉相似性和酉合同在量子计算和量子信息科学中有广泛的应用。
以量子门为例,一个量子门是一个酉算符,通过作用于量子比特上,可以实现量子计算中的逻辑操作。
另外,酉相似性和酉合同还被广泛应用于量子态的描述和演化过程。
例如,在量子态的压缩和纠缠测度中,我们常常需要寻找酉相似变换,从而实现对量子态的优化表示和分析。
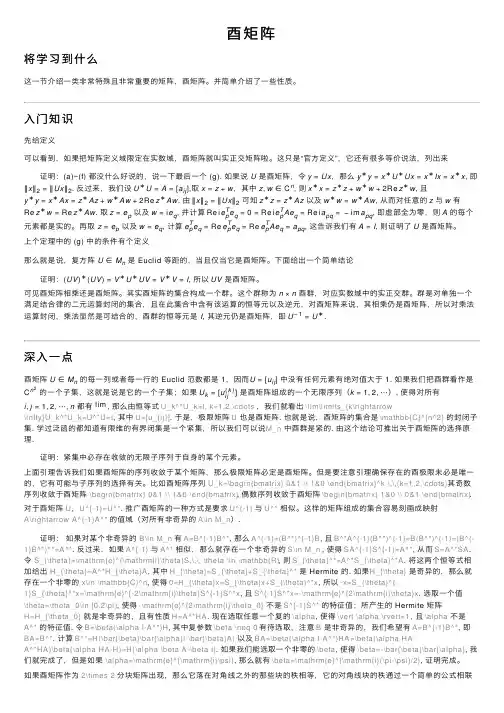
⾣矩阵将学习到什么这⼀节介绍⼀类⾮常特殊且⾮常重要的矩阵,⾣矩阵。
并简单介绍了⼀些性质。
⼊门知识先给定义可以看到,如果把矩阵定义域限定在实数域,⾣矩阵就叫实正交矩阵啦。
这只是“官⽅定义”,它还有很多等价说法,列出来 证明:(a)~(f) 都没什么好说的,说⼀下最后⼀个 (g). 如果说U是⾣矩阵,令y=Ux,那么y∗y=x∗U∗Ux=x∗Ix=x∗x, 即‖x‖2=‖Ux‖2. 反过来,我们设U∗U=A=[a ij],取x=z+w,其中z,w∈C n, 则x∗x=z∗z+w∗w+2Re z∗w, 且y∗y=x∗Ax=z∗Az+w∗Aw+2Re z∗Aw. 由‖x‖2=‖Ux‖2可知z∗z=z∗Az以及w∗w=w∗Aw, 从⽽对任意的z与w有Re z∗w=Re z∗Aw. 取z=e p以及w=i e q, 并计算 Re i e T p e q=0=Re i e T p Ae q=Re i a pq=−im a pq, 即虚部全为零,则A的每个元素都是实的。
再取z=e p以及w=e q, 计算e T p e q=Re e T p e q=Re e T p Ae q=a pq, 这告诉我们有A=I, 则证明了U是⾣矩阵。
上个定理中的 (g) 中的条件有个定义那么就是说,复⽅阵U∈M n是 Euclid 等距的,当且仅当它是⾣矩阵。
下⾯给出⼀个简单结论 证明:(UV)∗(UV)=V∗U∗UV=V∗V=I, 所以UV是⾣矩阵。
可见⾣矩阵相乘还是⾣矩阵。
其实⾣矩阵的集合构成⼀个群。
这个群称为n×n⾣群,对应实数域中的实正交群。
群是对单独⼀个满⾜结合律的⼆元运算封闭的集合,且在此集合中含有该运算的恒等元以及逆元,对⾣矩阵来说,其相乘仍是⾣矩阵,所以对乘法运算封闭,乘法显然是可结合的,⾣群的恒等元是I, 其逆元仍是⾣矩阵,即U−1=U∗.深⼊⼀点⾣矩阵U∈M n的每⼀列或者每⼀⾏的 Euclid 范数都是 1,因⽽U=[u ij] 中没有任何元素有绝对值⼤于 1. 如果我们把⾣群看作是] 是⾣矩阵组成的⼀个⽆限序列(k=1,2,⋯), 使得对所有C n2的⼀个⼦集,这就是说是它的⼀个⼦集;如果U k=[u(k)iji,j=1,2,⋯,n都有lim, 那么由恒等式U_k^*U_k=I, k=1,2,\cdots,我们就看出\lim\limits_{k\rightarrow\infty}U_k^*U_k=U^*U=I, 其中U=[u_{ij}]. 于是,极限矩阵U也是⾣矩阵. 也就是说,⾣矩阵的集合是\mathbb{C}^{n^2}的封闭⼦集. 学过泛函的都知道有限维的有界闭集是⼀个紧集,所以我们可以说M_n中⾣群是紧的. 由这个结论可推出关于⾣矩阵的选择原理. 证明:紧集中必存在收敛的⽆限⼦序列于⾃⾝的某个元素。

矩阵相似的判定条件矩阵相似性是计算机科学中一个重要的概念,它有实际的应用价值,如模式识别,图像处理,信号处理,数值分析,机器学习等。
然而,矩阵相似性也是一个比较抽象的概念,不同的人对它的理解是不一样的。
简而言之,矩阵相似性是指在线性变换下两个矩阵,使得它们距离最小。
由此,可以把矩阵相似性归结为矩阵逼近问题。
只要把两个矩阵定义为相似,就可以根据给定的距离来决定两个矩阵的相似程度。
那么该如何判定两个矩阵是否相似?简单来说,就是判断它们之间的距离是否达到指定的阈值。
而距离的计算有多种方法:(1)Frobenius数:它是指一个矩阵A的数值绝对值累加和;(2)Frobenius离:它是两个矩阵A、B的Frobenius范数之差,即$$d_{F}(A,B):=||A-B||_{F}=sqrt{sum_{i=1}^{m}sum_{j=1}^{n}(A_{ij}-B_{ij})^2 }$$(3)Spectral离:它是两个矩阵A、B的特征值之差,即$$d_{s}(A,B)= sum_{i=1}^{m}|lambda_{Ai}-lambda_{Bi}|$$ (4)Kullback-Leibler (KL)-距离:它是两个矩阵A、B的边缘分布值之差,即$$d_{KL}(A,B)=sum_{i=1}^{m}sum_{j=1}^{n}A_{ij}logfrac{A_{ij }}{B_{ij}} + B_{ij}logfrac{B_{ij}}{A_{ij}} $$除了上述几种计算距离的方法外,还有其他一些更复杂的方法。
但是,上述四种方法都能用来衡量矩阵相似度,选择其中一种来判断两个矩阵是否相似,还是有较大的随机性的。
另外,在比较矩阵相似性时,还需要考虑其他因素,如:矩阵的大小、矩阵的行列式值、矩阵的特征值等。
比如,如果两个矩阵的行列式值差异较大,那么在比较它们的相似性时,距离的计算值就会受到更大的影响。
同样的,如果两个矩阵的特征值差异较大,那么在比较它们的相似性时,距离的计算值也会受到更大的影响。
酉相似性与合同相似性酉相似性与合同相似性的关系是一个有趣且具有深远影响的话题。
酉相似性是线性代数中的一个概念,而合同相似性则是矩阵理论领域中的一个重要观念。
本文将探讨这两个概念的定义、特点以及它们之间的联系。
一、酉相似性的定义与特点酉相似性是指两个矩阵之间存在一个特殊的线性变换,使得这两个矩阵通过该变换可以互相转化而不改变它们的特征值。
具体而言,对于两个n × n的矩阵A和B,如果存在一个酉矩阵U,使得U*AU = B 成立,那么我们称矩阵A与B是酉相似的。
酉相似性具有以下几个特点:1. 酉相似性是矩阵之间的一种等价关系:如果A与B是酉相似的,那么B与A也一定是酉相似的。
2. 酉相似性保持了矩阵的谱结构:即酉相似的两个矩阵具有相同的特征值,虽然特征向量可能不同。
3. 酉相似性是一种块状变换:如果A与B是酉相似的,它们的酉相似关系可以表示为一个块状的分解形式。
二、合同相似性的定义与特点合同相似性是矩阵理论中一个重要的概念,特指两个矩阵之间存在一个非奇异矩阵,使得这两个矩阵经过相似变换后可以得到相等的形式。
具体而言,对于两个n × n的矩阵A和B,如果存在一个非奇异矩阵P,使得P^TAP = B成立,那么我们称矩阵A与B是合同相似的。
合同相似性具有以下几个特点:1. 合同相似性是矩阵之间的一种等价关系:如果A与B是合同相似的,那么B与A也一定是合同相似的。
2. 合同相似性保持了矩阵的等价关系:即合同相似的两个矩阵有相同的秩和行列式。
3. 合同相似性保持了矩阵的性质:如果A是对称矩阵,那么合同相似的B也是对称的。
三、酉相似性与合同相似性的联系酉相似性与合同相似性之间存在着紧密的联系。
事实上,两个矩阵的酉相似性可以由它们的合同相似性推导得出,并且酉相似性是合同相似性的一个特例。
具体而言,如果A与B是酉相似的,即存在酉矩阵U,使得U*AU = B成立。
我们可以构造一个特殊的非奇异矩阵P,即P = U + iU^T,其中i是虚数单位。
矩阵理论简明教程第二版张凯学院课后答案下载《简明矩阵教程》(张凯学院)第二版课后答案下载《矩阵论简明教程》是科学出版社2004年出版的一本书。
以下是阳光网边肖想与大家分享的简明矩阵理论教程(张凯研究所编写)第二版,供大家参考!《简明矩阵教程》(张凯学院)第二版课后答案下载点击此处下载简明矩阵理论课程第二版课后答案(张凯学院编写)简明矩阵课程第二版(张凯学院):内容简介矩阵相似变换、范数理论、矩阵分析、矩阵分解、特征值的估计和表示、广义逆矩阵、矩阵直积、线性空间和线性变换。
每章都配有练习题,书末有练习题答案和提示。
与传统的矩阵理论教材不同,《矩阵论简明教程》没有从较为抽象的线性空间和线性变换入手,而是在较为具体的矩阵相似变换理论的基础上,介绍矩阵理论的主要内容,从而达到由简入深的目的,使读者能够在短时间内掌握现代矩阵理论中相当广泛和基本的内容。
学过工程线性代数课程的都可以读《矩阵论简明教程》。
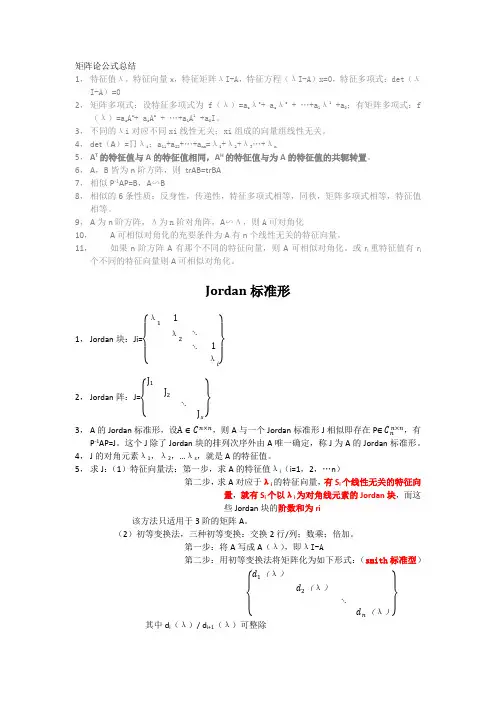
[1]《矩阵简明教程》(第二版)(张凯学院):内容第一章矩阵的相似变换1.1特征值和特征向量1.2相似对角化1.3约旦标准表格介绍1.4i米尔顿-卡耶定理1.5个向量的内积1.6酉相似下的标准型1个练习第二章规范理论2.1向量范数2.2矩阵范数2.2.1方阵的范数2.2.2与向量范数的兼容性2.2.3从属定额2.2.4长方阵的范数2.3规范应用示例2.3.1矩阵谱半径矩阵的条件数练习2第三章矩阵第四章矩阵分解第五章特征值的估计和表达第六章广义逆矩阵第七章矩阵的直积第八章线性空间和线性变换问题解决和提示。
相似矩阵的判定及其应用摘要:相似矩阵是高等代数中重要的知识点,在本文中,我们先给出了判定两个矩阵相似的三种方法,然后我们知道矩阵相似于对角矩阵是高等代数中一个重要而基本的问题,我们给出怎样判断矩阵A是否可对角化,然而我们知道一个矩阵未必相似于对角矩阵,但是在复数域上任何一个矩阵都与一个若而当形矩阵相似,因此我们给出了矩阵的相似标准形及其应用;最后,我们给出了矩阵相似在实际生活中(尤其是考研中)的应用.关键字:相似矩阵,对角矩阵,若尔当标准形1.相似矩阵及其判定这一节我们在系统归纳相似矩阵的一些相关概念和性质的基础上,着重介绍相似矩阵的几种判定方法。
并通过一些具体的例子加以说明。
下面我们首先介绍相关的概念和性质。
定义1设A,B为数域P上两个n级矩阵,如果可以找到数域P上的n级可逆矩阵X,使得B=1X A X,就说A相似于B,记BA~过渡矩阵矩阵等价 特征矩阵 行列式因子 不变因子 初等因子相似是矩阵之间的一种关系,这种关系具有三个性质: ⑴反身性: A A ~⑵对称性:如果B A ~,那么A B ~⑶传递性:如果B A ~,C B ~,那么C A ~在此基础上,定理1.1 线性变换在不同基下所对应的矩阵相似。
我们从下面的例1来看这个定理的应用。
例112312312311112A B A a εεεεεεεεεεεεε⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦ΛΛΛΛΛ=++1112133332312122232322213132331312112131a a a a a a 设=a a a ,a a a 是数域P 上的矩阵,证明A ,B 相似.a a a a a a 证明:设数域P 上的三维线性空间V 的一个线性变换在V 中的一组基,,下的矩阵为A ,(,,)=(,,)a a 即:32123312333212321132********,,a B A B a εεεεεεεεεεεεεεεεεεεεεεε⎧⎪Λ=++⎨⎪Λ=++⎩Λ=++⎧⎪Λ=++⎨⎪Λ=++⎩Λ⎡⎤⎢⎥=Λ⎢⎥⎢⎥⎣⎦12223213233333231332221231213332312322211312a a a a a a a a a 于是a a a a a 在基,下的矩阵a a a a a a ,为同一线性变换在两组不同的基下的矩阵,a a 由定理1A B 可得:同一线性变换在两组不同的基下的矩阵相似,可得,相似.例2 设3P 的线性变换σ将基1α=(-1,0,-2),2α=(0,1,2)3α=(1,2,5)变成σ(1α)=(2,0,-1),σ(2α)=(0,0,1),σ(3α)=(0,1,2)求σ在基1β,2β,3β下的矩阵,其中1β=(-1,1,0),2β=(1,0,1),3β=(0,1,2). 解题步骤:(1)先求出σ在基1α,2α,3α下的矩阵A ;(2)求出由基1α,2α,3α到1β,2β,3β的过渡矩阵P ; (3)求出σ在基1β,2β,3β下的矩阵B =1P AP -.解:我们从平常的解题中知道,我们通常取标准基1ε=(1,0,0),2ε=(0,1,0),3ε=(0,0,1)为中介,若令M =200001112⎡⎤⎢⎥⎢⎥⎢⎥-⎣⎦ , N = 101012225-⎡⎤⎢⎥⎢⎥⎢⎥-⎣⎦, T =110101012-⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦则σ(1α,2α,3α)=(1ε,2ε,3ε)M (1α,2α,3α)=(1α,2α,3α)N (1β,2β,3β)=(1ε,2ε,3ε)T ,故σ在基1α,2α,3α下的矩阵1A N M -=,并且由基1α,2α,3α到基1β,2β,3β的过渡矩阵1P N T -=,从而σ在基1β,2β,3β下的矩阵1111221421211B P AP T NN MN T -----⎡⎤⎢⎥===-⎢⎥⎢⎥--⎣⎦定理1.2 设A ,B为数域P 上两个n ⨯n 矩阵,它们的特征矩阵E A λ-和E B λ-等价则可得A 与B相似.想保留证明过程,可以把它作为用定义1来判定矩阵相似的例子。
酉矩阵与酉相似性酉矩阵是数学中的一个重要概念,它在矩阵和线性代数的研究中扮演着关键的角色。
本文将从酉矩阵的定义、性质以及与酉相似性的关系进行论述,以便更好地理解和应用这一概念。
1. 酉矩阵的定义酉矩阵是指一个复数矩阵U,满足其转置矩阵的共轭是其逆矩阵,即U*U^T=I,其中I是单位矩阵。
换句话说,酉矩阵满足U*U^†=I,其中†表示共轭转置。
2. 酉矩阵的性质酉矩阵具有许多重要的性质,这些性质使得酉矩阵在矩阵乘法、特征值与特征向量等方面具有重要的应用。
2.1 酉矩阵的行列式模长为1酉矩阵的行列式模长为1,即|det(U)|=1。
这是因为酉矩阵的特殊性质保证了其行列式的模长为1,这使得酉矩阵在旋转、缩放等变换中起到了关键作用。
2.2 酉矩阵的特征值模长为1酉矩阵的特征值的模长为1,即对于酉矩阵U,其特征值λ满足|λ|=1。
这是由于酉矩阵的性质决定的。
2.3 酉矩阵的列向量是正交归一化的酉矩阵的列向量是归一化且两两正交的,即对于酉矩阵U的列向量ui和uj,有ui*uj=0(i ≠ j)和|ui|=1。
这是酉矩阵的重要性质之一,也是其在正交变换中广泛应用的原因之一。
3. 酉矩阵与酉相似性酉矩阵之间存在一种特殊的关系,称为酉相似性。
如果矩阵A和酉矩阵U满足U^†AU=B,其中B是一个矩阵,那么称A与B相似,且矩阵A与矩阵B之间的相似变换由酉矩阵U给出。
酉相似性的概念与相似矩阵的概念类似,但其限定了相似变换的矩阵必须是酉矩阵,从而在复数域中引入了新的概念。
酉相似性在量子力学和信号处理等领域中有广泛的应用。
4. 酉矩阵的应用酉矩阵作为数学中的一个重要概念,具有广泛的应用。
以下列举几个常见的应用领域:4.1 量子力学酉矩阵在量子力学中扮演着重要的角色。
量子力学中的态矢量可以表示为复数向量,而酉矩阵用于描述量子系统的时间演化和变换。
酉矩阵的特殊性质使其在量子力学中具有重要的应用价值。
4.2 信号处理在信号处理中,酉矩阵常用于描述信号的变换和处理。
酉相似充要条件
在几何学中,酉相似是指两个物体之间存在着某种比例关系,使得它们的形状和结构相似。
这种相似性可以通过几何变换来实现,例如缩放、旋转或平移。
酉相似的充要条件是存在一个酉矩阵,使得两个物体之间的距离和角度都得到保持。
酉相似的充要条件可以通过以下方式来理解。
首先,我们假设有两个物体A和B,它们之间的距离和角度都得到保持。
这意味着无论我们如何缩放、旋转或平移这两个物体,它们之间的距离和角度都不会改变。
换句话说,我们可以通过一系列的几何变换将物体A变换为物体B。
现在,我们来证明酉相似的充要条件。
首先,假设存在一个酉矩阵U,使得U*A=B。
我们可以通过将物体A应用酉矩阵U来得到物体B。
由于酉矩阵保持距离和角度不变,所以物体A和物体B之间的距离和角度都得到保持。
因此,存在一个酉矩阵使得两个物体之间的距离和角度都得到保持。
接下来,我们来证明酉相似的充要条件的逆命题。
假设存在一个酉矩阵U,使得两个物体之间的距离和角度都得到保持。
我们可以通过将物体A应用酉矩阵U来得到物体B。
由于酉矩阵保持距离和角度不变,所以物体A和物体B之间的距离和角度都得到保持。
因此,存在一个酉矩阵使得U*A=B。
酉相似的充要条件是存在一个酉矩阵,使得两个物体之间的距离和角度都得到保持。
这个条件可以通过几何变换来实现,例如缩放、旋转或平移。
酉相似的充要条件是几何学中一个重要的概念,它可以用来描述物体之间的相似性和变换关系。