手动手柄操纵控制
- 格式:doc
- 大小:25.50 KB
- 文档页数:2
数控手柄操作说明数控手柄是一种用于控制数控机床的操作工具,主要用于数控机床的手动操作和设置参数。
它具有易于操作、便捷灵活的特点,可以帮助操作人员更好地控制和操作数控机床。
下面将对数控手柄的操作进行详细说明。
一、数控手柄的基本结构:数控手柄主要由操作盒、按键和显示屏组成。
操作盒是数控手柄的主体,用于操控数控机床的各个动作。
按键用于输入指令和进行参数设置。
显示屏用于显示运行状态和参数。
数控手柄的外形通常为手持式设计,便于操作人员携带和操作。
二、数控手柄的操作步骤:1.连接数控手柄与数控机床:首先将数控手柄与数控机床连接,确保连接稳固。
接通电源,待数控机床和数控手柄都正常启动后,方可进行后续操作。
2.打开数控手柄:按下数控手柄上的开关按钮,手柄上的显示屏将亮起,进入待机状态。
待机状态下,数控手柄可以接收指令及操作。
3.选择操作模式:根据需要选择相应的操作模式。
数控手柄通常支持手动操作模式和自动操作模式。
手动操作模式用于手动控制数控机床的运动,自动操作模式用于自动运行程序。
通过按下手柄上的切换按钮进行模式切换。
4.手动操作模式下的操作:若选择手动操作模式,则可通过手柄上的各个按键来控制机床的运动。
手柄上的方向键用于控制机床各个轴向的移动方向,加速度键和减速键用于控制运动速度的快慢。
此外,数控手柄还配有紧停按钮,用于紧急停止机床的运动。
5.自动操作模式下的操作:若选择自动操作模式,则可通过手柄上的相关按键设置运行程序。
手柄上的功能键用于输入程序号、启动程序和暂停程序。
手柄上还包括数控编程键和参数设置键,用于编写程序和设置运行参数。
6.程序调试和运行:在自动操作模式下,可以通过手柄上的控制按钮进行程序调试和运行。
首先输入程序号和设定相应参数,然后按下启动按钮启动程序。
在程序运行过程中,可以通过手柄上的暂停按钮暂停程序,查看程序执行情况。
7.关闭数控手柄:在使用完毕后,按下数控手柄上的关闭按钮,数控手柄将自动关闭。
断路器操作机构原理
断路器操作机构原理是指用于控制断路器开关状态的一种机构或装置。
它主要由操作手柄、驱动装置、联锁机构等几个部分组成。
操作手柄是用于手动操纵断路器的一个杆状构件。
通过对操作手柄的旋转或推拉,可以控制断路器的合闸和分闸动作。
驱动装置是用来转换操作手柄运动的力和动力的一个装置。
它通常由机械传动装置或电动机驱动装置组成。
联锁机构是用于保证断路器在特定的操作顺序和条件下工作的一个装置。
它可以限制操作手柄的移动,以避免错误的操作导致不安全的工作状态。
联锁机构通常包括机械、电气和电子等几种类型。
在正常情况下,断路器操作机构处于分闸位置。
当需要合闸时,通过操作手柄的旋转或推拉,将驱动装置传递的力和动力转化为断路器合闸运动。
此时,联锁机构会确保各个部件在合闸顺序和条件下正常工作。
相反,当需要分闸时,通过操作手柄将断路器操作机构恢复到分闸位置。
断路器操作机构的原理是通过操作手柄、驱动装置和联锁机构的合作,实现对断路器开关状态的控制。
它能够保证断路器在工作过程中的安全可靠性,防止操作人员的误操作和设备的损坏。
这种原理在电力系统和工业领域中得到广泛的应用。
电梯按控制方式及各种方式原理按控制方式分类①手柄操纵控制电梯。
此种电梯由司机操纵轿厢内的手动开关,实现轿厢运行的控制。
电梯轿门和厅门的开关有自动和手动两种型式。
对于自动门电梯,当轿厢运行到平层区域时,司机将手柄开关回到零位,电梯就会换速自动平层,自动开门;对于手动门电梯,则需由司机手动将门关闭或打开。
②按钮控制电梯。
这是一种通过操纵层门外侧按钮或轿厢内按钮发出指令,使轿厢停靠层站的电梯。
这种电梯也有自动和手动两种型式。
自动门电梯具有自动平层、开关门功能。
对于手动门电梯,在电梯到站平层后,需要有人将门打开,并通过人工将门关闭以后,电梯得到按钮指令才可运行。
③信号控制电梯。
这是一种由电梯司机操纵轿厢运行的电梯,具有将层门外上下召唤信号、轿厢内选层信号和其他各种专用信号加以综合分析判断的功能,因而自动控制程度较高。
④集选控制电梯。
此种电梯自动控制程度更高,可以实现将层门外上下召唤信号、轿厢内选层信号和其他各种专用信号加以综合分析判断后自动决定轿厢运行,无需司机控制。
集选控制电梯一般均设“有/无司机”操纵转换开关,可根据使用需要灵活选择。
如人流高峰或特殊需要时,可转换为有司机操纵,从而成为信号控制电梯。
在其他情况下作正常行驶时,可转为无司机操纵,即为集选控制电梯。
⑤向下集选控制(向下集中控制)电梯。
这种电梯的特点是,对于各层站的呼梯信号,轿厢只有在向下运行时才能顺向应答召唤停靠。
⑥并联控制电梯。
将两三台电梯集中排列,共用层门外召唤信号,按规定顺序自动调度,确定其运行状态。
采用此种控制方式的电梯,在无召唤信号时,在主楼面有一台电梯处于关门备用状态,另外一台或两台电梯停在中间楼层随时应答厅外呼梯信号,前者常称为基梯,后者称为自由梯。
当基梯起动运行后,自由梯可自动起动至基站等待。
若厅外其他层站有呼梯信号时,自由梯则前往应答与其运行方向相同的所有召唤信号。
对于与自由梯运行方向相反的召唤信号,则由基梯前往应答。
如果两台(或三台)电梯都在应答两个方向的呼梯信号时,先完成应答任务的电梯返回主楼面备用。
足球手柄操控指南碧绿深湾LB对应L1,RB对应R1LT对应L2,RT对应R2LS对应L3360°(左摇杆),RS对应R3360°(右摇杆)LS对应按下L3,RS对应按下R3Y对应△,X对应□,A对应×,B对应○一、进攻(进攻方向,自左向右)①带球1. 带球:方向键(或左摇杆,下同)2. 低速带球:R2+方向键3. 横向带球(特定球员):R2+方向键↑或↓4. 高速带球:R1+方向键5. 趟球:高速带球时连按R1(2~3)6. 大步趟球:高速带球时,R1+R2+方向键↗,↘,↑或↓7. 急停:松开方向键,按R18. 急停后面对进攻方向:松开方向键,按R29. 拨出球:静止时,L2+R3↗↗或↘↘10. 跳跃(跳起躲避铲球):面对铲球时按R2②接球1. 停球:方向键2. 让球转身:R1+方向键(球运动方向)③传球1. 短传:×2. 脚后跟传球:背对进攻方向键+×3. 不停球短传:停球前按×④长传1. 长传:○2. 不停球长传:停球前按○3. 边路转移:向另一边路方向键+○⑤直传1. 直传:△2. 不停球直传:停球前按△3. 过顶直传:L1+△⑥二过一1. 地面二过一:L1+×,停球前按△2. 空中二过一:L1+×,停球前按L1+△3. 传球后插上:传球后,按R2⑦手动传球1. 手动传球:L2+方向键+×或△2. 手动长传:L2+方向键+○⑧下底传中1. 高球传中:方向键+○2. 低球传中:方向键+○*23. 地平球传中:方向键+○*34. 高弧度传中:传中时+R25. 45°吊中:L1+方向键+○⑨射门1. 射门:□2. 不停球射门:停球前按□3. 脚弓搓射:按□后显示力度条时按R24. 吊射(高弧度):L1+ □5. 吊射(低弧度):按□后显示力度条时按R1二、假动作(进攻方向是右)①上身假动作1. 上半身虚晃:静止(跑动)时,按R3↑或↓2. 马修斯假动作:静止(跑动)时,按R3↑,然后按方向键↘;或按R3↓,然后按方向键↗3. 马修斯假动作接侧向:静止时,按R3↑,然后按方向键↓;或按R3↓,然后按方向键↑②踩单车1. 正向踩单车:静止(跑动)时,按R3→↘↓或→↗↑2. 反向踩单车:静止(跑动)时,按R3↑↗→或↓↘→3. 假踩单车:静止(跑动)时,按R3↑↗→,然后按下方向键↗;或按R3↓↘→,然后按下方向键↘4. 外侧踩单车:静止(跑动)时,按R3↑↗→,然后按下方向键↖;或按R3↓↘→,然后按下方向键↙③踩球1. 踩球回拉:停球时,L2+R3←2. 踩球&左(右)侧踢出:停球时,L2+R3↑(↓)3. 左侧假动作(若为右足):静止时,按住L2+R3←,然后按方向键↓4. 拉球转身(若为右足):静止时,按住L2+R3←,然后按方向键↑5. 脚后跟假动作:静止时,按住L2+R3←↖↑,然后按方向键↓;或按住L2+R3←↙↓,然后按方向键↑6. 内侧磕球:静止(跑动)时,按住L2+R3←,然后按方向键→7. 拉球左(右)转:静止(跑动)时,按住L2+R3←,然后按方向键↗(↘)④牛尾巴1. 牛尾巴(若右足):L2+R3↘,然后按方向键↗2. 反向牛尾巴(若右足):L2+R3↗,然后按方向键↘⑤马赛回旋1. 马赛回旋:L1+R3顺时针或逆时针一周2. 单足回旋(若右足):L1+R3顺时针一周⑥变向技巧1. 胯下转身:带球时,L2+R3↑,紧接方向键↑或带球时,L2+R3↓,紧接方向键↓⑦侧步技巧1. 侧步带球:按住L2+R3↑,↓,或带球时按住方向键→2. 侧步单车:侧步带球中,按住L2+R3↑↗→↘↓,然后按下方向键↑3. 侧步跨绕:侧步带球中,按住L2+R3↑↗→,然后按下方向键↑⑧挑球技巧1. 左侧挑球:静止(跑动)时,按住L2+R3,然后按方向键↗2. 右侧挑球:静止(跑动)时,按住L2+R3,然后按方向键↘3. 脚后跟挑球:静止(跑动)时,按住L2+R3*2⑨特殊动作1. 假射:射门时按□,出球前按×2. 假传:长传时按○,出球前按×3. 直传取消:直传时按△,出球前按R1+R24. 短传取消:短传时按×,出球前按R1+R25. 漏球:停球前松开方向键,然后按R16. 假摔:L3+R3+L1+L27. 要球:R2*2(绿茵传奇或锁定球员模式)8. 趟球过人:静止时(防守队员贴近时),按R2+R1,然后按方向键→;跑动时(防守队员贴近时),按R2+R19. 趟球过人(一对一):静止(跑动)时(防守队员贴近时),按R2,然后按方向键↗或↘⑩队员模式1. 协助式:推动R3360°(右摇杆)键至被呼叫队员,然后按下R3键。
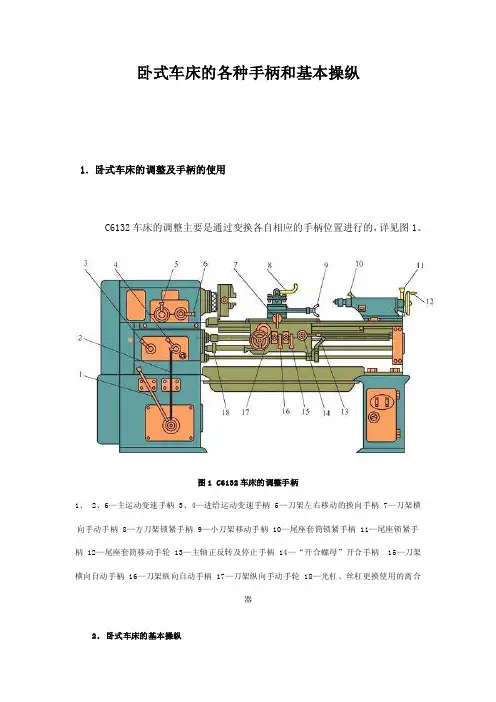
卧式车床的各种手柄和基本操纵1.卧式车床的调整及手柄的使用C6132车床的调整主要是通过变换各自相应的手柄位置进行的,详见图1。
图1 C6132车床的调整手柄1、 2、6—主运动变速手柄 3、4—进给运动变速手柄 5—刀架左右移动的换向手柄 7—刀架横向手动手柄 8—方刀架锁紧手柄 9—小刀架移动手柄 10—尾座套筒锁紧手柄 11—尾座锁紧手柄 12—尾座套筒移动手轮 13—主轴正反转及停止手柄 14—“开合螺母”开合手柄 15—刀架横向自动手柄 16—刀架纵向自动手柄 17—刀架纵向手动手轮 18—光杠、丝杠更换使用的离合器2.卧式车床的基本操纵(1)停车练习(主轴正反转及停止手柄13在停止位置)1)正确变换主轴转速。
变动变速箱和主轴箱外面的变速手柄1、2或6,可得到各种相对应的主轴转速。
当手柄拨动不顺利时,可用手稍转动卡盘即可。
2)正确变换进给量。
按所选的进给量查看进给箱上的标牌,再按标牌上进给变换手柄位置来变换手柄3和4的位置,即得到所选定的进给量。
3)熟悉把握纵向和横向手动进给手柄的转动方向。
左手握纵向进给手动手轮17,右手握横向进给手动手柄7。
分别顺时针和逆时针旋转手轮,操纵刀架和溜板箱的移动方向。
4)熟悉把握纵向或横向机动进给的操纵。
光杠或丝杠接通手柄18位于光杠接通位置上,将纵向机动进给手柄16提起即可纵向进给,如将横向机动进给手柄15向上提起即可横向机动进给。
分别向下扳动则可停止纵、横机动进给。
5)尾座的操纵。
尾座靠手动移动,其固定靠紧固螺栓螺母。
转动尾座移动套筒手轮12,可使套筒在尾架内移动,转动尾座锁紧手柄11,可将套筒固定在尾座内。
(2)低速开车练习练习前应先检查各手柄位置是否处于正确的位置,无误后进行开车练习。
1)主轴启动——电动机启动——操纵主轴转动——停止主轴转动——封闭电动机2)机动进给——电动机启动——操纵主轴转动——手动纵横进给——机动纵横进给——手动退回——机动横向进给——手动退回——停止主轴转动——封闭电动机特别留意:1)机床未完全停止严禁变换主轴转速,否则发生严重的主轴箱内齿轮打齿现象甚至发生机床事故。
德国GESSMANN手柄控制器正确操作方法德国GESSMANN手柄控制器正确操作方法德国GESSMANN双手柄控制器D85是一款坚固耐用的开关装置,适用于电动液压和万用表设置在直流电压+20V (DC)档位,将万用表黑表笔与红表笔分别靠在转把的黑线和红线上,观察万用表读数是否与标称电压相符,它们的上下电压差不应超过0.2V。
否则说明控制器内部电源出现故障了,般有刷控制器可以通过更换三端稳压集成电路排除故障。
当电动车无刷控制器缺相时起重应用。
转保护功能:自动判断电机在过流时是处于堵转状态还是在运行状态或电机短路状态,如果过流时是处于运行状态,控制器将限流值设定在固定值以保持整车的驱动能力;如电机处于纯堵转状态,则控制器2后将限流值控制在10A以下,起到保护电机和电池,节省电能;如电机处于短路状态,控制器则使输出电流控制在2A以下,以确保控制器及电池的安全。
动静态缺相保护:指在电机运行状态时,电动车电机任意- -相发生断相故障时,控制器实行保护,避免造成电机烧毁,同时保护电动车电池、延长电池寿命。
功率管动态保护功能:控制器在动态运行时,实时监测功率管的工作情况,- -旦出现功率管损坏的情况,一种是巡检模式,另-种是识别模式。
在巡检模式下,控制器不断向读卡器发送查询代码,并接收读卡器的回复命令。
这种模式会一直保持下去,直至读卡器感应到卡片。
当读卡器感应到卡片后,读卡器对控制器的巡检命令产生不同的回复,在这个回复命令中,读卡器将读到的感应卡内码数据传送到门]禁控制器,使i ]禁控制器进入到识别模式。
在门]禁控制器的识别模式下,在执行指令的过程中进行计数,自动加一个增量,就可以形成下一条指令的地址,从而达到顺序执行指令的目的。
控制器马上实施保护,以防止由于连锁反应损坏其他的功率管后,出现推车比较费力的现象,解决了无刷电动车控制器由于转把或线路故障引起的飞车现象,提高了系统的安全性。
用户可自行调整采用自向助力或反向助力,实现了在骑行中辅以动力,让骑行者感觉更轻松。
ABB机器人的手动操作ABB机器人是一种自动化机器人,能够进行高度精确的自动化操作,但它也具备手动操作功能。
手动操作是指当人工干预或需要进行一些不规则的操作时,操作人员可以手动控制机器人进行运动或执行任务。
下面将介绍ABB机器人的手动操作及其相关内容。
一、手动控制盒介绍在手动控制盒上,有两个重要的按钮:播放按钮和调试按钮。
播放按钮是用来开始和停止机器人的移动,通过按下按钮,机器人会进行相应的操作。
调试按钮是用来进入调试模式的,可以在该模式下进行性能监控、参数调整、系统网络配置等操作。
二、手动操作模式1.关节模式:关节模式下,机器人的手臂关节可以单独控制。
通过手动控制盒上的手柄,操作人员可以控制机器人每个关节的运动方向、速度和位置。
这种模式适用于需要对关节进行精确控制的操作,例如调整机器人手臂姿势、手动示教等。
2.线性模式:线性模式下,机器人的手臂可以在笛卡尔坐标系下进行完整的位移、旋转等动作。
通过手动控制盒上的手柄,操作人员可以控制机器人在三维空间中的位置和方向。
这种模式适用于需要对整个机器人进行精确控制的操作,例如移动到指定位置、进行拾取放置等。
3.示教模式:示教模式下,机器人可以记录并重放操作人员手动进行的动作。
通过手动控制盒上的按钮,操作人员可以将自己的动作记录下来,并保存在机器人控制系统中。
然后,机器人可以根据这些记录的动作进行自动化操作,实现自动的重复任务。
这种模式适用于需要对机器人进行复杂操作的任务,例如零件装配、焊接等。
三、手动操纵与程序控制虽然ABB机器人的手动操作功能非常强大,但在实际应用中,它一般与程序控制相结合。
机器人可以根据预先编写的程序进行自动化操作,而手动操作则用于进行一些特殊的场景或调试工作。
在实际操作中,手动操作通常用于以下几个方面:1.机器人运动测试:通过手动控制盒,操作人员可以手动移动机器人的各个关节,检查机器人的运动是否正常。
这对于机器人的调试和故障排除非常重要。
阀门手动执行机构结构
阀门手动执行机构结构指的是用于操作和控制阀门的手动装置的组成部分和工作原理。
阀门手动执行机构通常由阀门手轮、阀门手杆和阀门手柄等组件组成。
阀门手轮是手动执行机构的核心部件,通常位于阀门上方,用于手动操作阀门的开启和关闭。
手轮通常由金属材质制成,具有一定的直径和厚度,以便操作人员能够轻松旋转。
阀门手杆是连接手轮和阀门的部件,用于传递旋转力矩和执行开闭动作。
手杆与阀门通过柱塞、螺纹或键连接,从而实现手动操作。
阀门手柄作为手动执行机构的辅助部件,用于增加操作人员对手轮的杠杆效应,以便更轻松地迅速转动阀门。
柄把通常位于手轮的边缘,也可以是侧面。
除了以上核心组件外,阀门手动执行机构通常还包括一些辅助装置,如阀门位置指示器、阀门锁止装置等。
位置指示器用于显示阀门的开启程度,以便操作人员准确控制阀门的工作状态;阀门锁止装置用于固定阀门在特定位置,防止意外操作。
阀门手动执行机构结构的设计和选择应根据阀门的类型、工作介质和使用环境等因素进行合理的考虑。
合理的手动执行机构结构可确保阀门的可靠操作和长期稳定工作。
手柄天车操作规程1. 操作前准备工作在操作手柄天车之前,需要进行以下准备工作:•确保手柄天车所在的工作区域没有障碍物,且地面平整稳固;•检查手柄天车的电源是否已接通,并确保电源正常;•检查手柄天车的安全装置是否完好,并及时修复;•穿戴必要的个人防护装备,如安全帽、防护鞋、手套等;•熟悉手柄天车的控制按钮和操作方法;•检查货物是否牢固固定,确保手柄天车上没有悬挂的物体。
2. 操作步骤步骤一:启动手柄天车1.按下手柄天车的启动按钮,确认电源已接通;2.检查显示屏是否正常显示;3.若显示屏正常,手柄天车已启动成功。
步骤二:选择操作模式手柄天车提供自动和手动两种操作模式,根据实际情况选择相应的模式。
•自动模式:通过预设的程序自动完成工作任务。
•手动模式:操作人员手动控制手柄天车的运行。
步骤三:手动控制操作若选择手动模式操作手柄天车,请按以下步骤进行操作。
1.使用控制手柄控制天车运行方向:–将手柄向前推,天车向前运行;–将手柄向后拉,天车向后运行;–将手柄向左推,天车向左运行;–将手柄向右推,天车向右运行。
2.使用控制手柄控制天车的升降和转向:–扭动手柄顶部旋钮,可控制天车的升降;–按下手柄侧面按钮,可控制天车的转向。
3.操作按钮功能说明:–紧急停车按钮:按下该按钮可立即停止手柄天车的运行;–转速调节按钮:根据需要调节手柄天车的运行速度;–灯光开关按钮:控制手柄天车的灯光。
步骤四:自动模式操作若选择自动模式操作手柄天车,请按以下步骤进行操作。
1.打开自动模式开关,进入自动模式;2.在显示屏上选择预设的工作程序;3.启动自动工作程序,并实时监控天车的运行状态;4.若有异常情况或故障发生,及时停止自动程序并报告维修人员。
3. 安全注意事项在操作手柄天车时,应注意以下事项以确保人员和设备的安全:1.操作人员严禁将手指、手臂或其他身体部位伸入运转中的手柄天车;2.禁止携带易燃、易爆等危险物品接近手柄天车;3.在手柄天车附近工作的人员应保持警惕,避免被移动的货物撞击;4.不得悬挂超过手柄天车额定承载能力的物体;5.手柄天车在移动过程中,应确保货物稳固,不得晃动或滑落;6.定期检查手柄天车的安全装置和绳索、刹车等部件,确保其工作正常;7.若遇到紧急情况,应立即按下紧急停车按钮,停止手柄天车运行,并立即报告维修人员。
ABB机器人操作教程目的:本人对ABB机械手的一些操作经验做出总结,希望对有需要的人提供参考一:机械原点校正1、将机械手驱动器切换到手动状态(驱动器上有一钥匙开关旋到一个手形图标侧)2、手持示教器收握住示教器电键开关轻按至示教器屏幕上显示出电机开启,如果手按重了是无法操纵机械手的,放开后重新按电键开关直到示教器显示电机开启;打开示教器主画面3、点击手动操纵图标进入手动操作画面图14、参照图1,按标记1处按键解除线性运动模式5、参照图1,按标记3处操纵手柄,按照屏幕提示操纵手柄调整机械手本体1-6轴至机械原点处(机械手本体机械原点识别方法为每个轴运动部分与固定部分均有一个缺口,固定部分与运动部分对其即可;图1标记2处按键为轴切换按键,按一次为1-3轴,再按一次为4-6轴)二:更新转数计数器1、机械原点校正2、打开示教器主画面3、点击校准按钮进入画面,选择更新转数计数器4、点击校准,进入画面选中ROB-1点击确认5、画面中会出现六个轴转数计数器rob1-1至rob1-6,成竖排显示全部选中5、点击更新确认6、退出当前画面,点击校准进入画面7、点击SMB内存,选高级8、点击清除SMB内存并确认9、完成之后关机重启三:修改位置点1、进入主画面2、点击程序编辑器3、点击调试4、点击PP移至光标,5、手持示教器收握住示教器电键开关轻按至示教器屏幕上显示出电机开启,如果手按重了是无法操纵机械手的,放开后重新按电键开关直到示教器显示电机开启6、按标记4或5按键进行模拟运转,程序走到那个程序节,程序指针会跳转到相应位置MoveJ开头的指令代表的是点位程序。
如果需要修改点击手动操纵图标进入手动操作画面图1a、参照图1,按标记1处按键解除线性运动模式b、参照图1,按标记3处操纵手柄,按照屏幕提示操纵手柄调整机械手本体1-6轴至机械原点处(机械手本体机械原点识别方法为每个轴运动部分与固定部分均有一个缺口,固定部分与运动部分对其即可;图1标记2处按键为轴切换按键,按一次为1-3轴,再按一次为4-6轴)7、手动修改之后点击修改位置四:恢复与备份程序1、进入主画面2、点击备份或恢复3、确定备份或恢复(可以选择备份地址或者驱动器本身硬盘或者U盘),点ABC图标进行选择文件地址。
滑移装载机的电液控制升级改造目前,多数滑移装载机的操作方式多是手动拉杆或液控比例减压阀方式。
前者劳动强度大,作业效率低; 后者安装维修困难,整机自动化程度低。
DELTA POWER公司为滑移装载机生产厂家提供了新型"电液一体化升级包", 适应于传统手动机械控制/液控的移动液压机械的电液一体化升级改造。
"电液一体化升级包"集成化程度高,性能可靠,安装便捷,可以提高整机的操作性能,提高作业率。
"电液比例控制升级包"包括系列电子摇杆、MPC编程控制器和电液比例减压阀。
特点如下:∙电控比例流量调速, 微控性能显著∙具备整机升级电子控制管理系统连接的接口、发动机节能控制,铲斗双向调平控制∙结构简单, 安装方便主要部件如下:1,电子摇杆(单轴双向,双轴双向)2,MPC编程控制器(2/4/8比例通道)3,电液比例减压阀(2/4/6片装)该系统具备铲斗双向调平系统的接口,配置双向调平系统可以大大提高工作效率。
滑移装载机铲斗双向调平系统装载机的生产厂家多年来一直在寻找一种经济可靠的双向平衡装置(上升、下降)。
上升平衡装置虽在市场已有,但实际运用上不尽人意。
目前租赁行业快速增长,但由于缺乏熟练的操作手,货物从装载机铲斗中散落,从叉车的叉杆上跌落的现象时有发生,不但生产力低下,而且作业失误频繁,引发安全隐患。
目前装卸设备厂家的水平调平系统主要有两种:机械平衡系统和液压单向平衡系统。
机械自动平衡装置,控制精度很高,但有自身的问题。
由于结构方面的原因,机械结构阻挡了操作者的视野,造价也很高,实际使用中经常出现故障。
原因是油缸为了达到水平状态经常被吸空,在油缸中产生气隙,如果有外力作用,例如在施工作业中遇到障碍,外力将被施加到整个设备上,此时液压的缓冲作用却无法发挥作用。
单向液压平衡装置已使用很多年了。
与机械平衡装置相比,单向液压平衡装置造价较低,使用效果也不错,但在功能上有致命缺点。
自动如何转换手动操作方法自动与手动操作是两种不同的操作方式,它们之间的转换可以通过以下几种方法实现。
1. 技术方法技术方法是将自动化设备改造成手动操作的方式之一。
在自动化设备中加入手动开关或手动按钮,以便操作人员可以在需要的时候手动控制设备的运行。
例如,可以在自动化生产线中设置手动模式,在手动模式下,操作人员可以通过手动按钮控制设备的启停、速度、力度等参数。
2. 软件方法软件方法是通过修改自动化设备的控制软件,使其支持手动操作模式。
通过更改设备的控制参数,将其从自动模式切换到手动模式,实现操作人员对设备的手动控制。
例如,在机床的数控系统中,可以通过修改程序,将机床从自动运行切换到手动模式,由操作人员通过操纵机床的手柄或按钮来完成操作。
3. 机械方法机械方法是通过改变自动化设备的机械结构,实现手动操作方式。
例如,可以在自动化门禁系统中,增加一个手动开关,以便操作人员可以手动打开或关闭门。
通过增加手动装置,改变设备的机械结构,将其从自动运行切换到手动操作。
4. 人工方法人工方法是指通过人工操作替代自动化设备的工作。
当自动化设备出现故障或需要维护时,可以通过人工操作来代替。
例如,在自动灌装生产线上,如果灌装机器出现故障,可以暂时由操作人员手动完成灌装工作,保证生产的正常进行。
5. 培训方法培训方法是通过培训操作人员,使其能够掌握手动操作的技巧和方法。
通过培训,操作人员可以学习如何正确使用手动工具和设备,以及如何进行手动操作。
通过培训,操作人员能够更好地应对自动设备故障或手动操作的情况。
6. 设备替换方法设备替换方法是指通过更换设备,将自动化设备替换为手动操作设备。
当自动化设备的故障频繁发生或无法修复时,可以考虑将其替换为手动操作设备。
虽然这种方法可能会增加人力成本,但可以提高工作的灵活性和可靠性。
总而言之,将自动操作转换为手动操作可以通过技术方法、软件方法、机械方法、人工方法、培训方法和设备替换方法等多种途径实现。
嵌入式USB接口数控系统控制卡说明书目录第一章一、安装说明 (3)1.软件安装 (3)2.硬件安装 (7)3.机床与控制卡的调试 (11)二、按键功能说明 (12)三、操作使用说明 (13)四、菜单列表示意图 (16)五、下载软件使用说明 (20)第二章一、基本操作说明 (24)1.键盘如何编号 (24)2.如何按键 (25)3.如何回答提示 (25)4.如何输入单个数字 (25)5.如何输入三轴参数 (26)6.如何使用菜单 (27)7.永久保存 (28)二、系统状态说明 (28)1.手动加工状态 (28)2.菜单状态 (28)3.自动加工状态 (29)三、坐标系使用说明 (29)1.机械坐标系 (29)2.工作坐标系 (30)3.坐标使用方法 (32)四、手动加工使用说明 (34)1.手动速度模式 (34)2.手动网络 (35)3.手动运动模式 (35)4.手动操作使用说明 (36)五、自动加工使用说明 (38)1.自动加工 (38)2.断点加工 (40)3.阵列加工 (41)4.注意事项 (41)六、参数设置使用说明 (42)七、对刀仪的使用方法 (45)八、多文件系统 (47)九、一键恢复功能 (47)十、控制卡电路简图 (47)一、安装说明控制卡是脱离电脑独立控制数控机床工作的,通过电脑机箱上的USB接口把要加工的文件传输给控制卡。
要使控制卡运行起来就需要用户安装USB的驱动程序,驱动程序需要的文件在配套光盘中已提供给用户,为文件包里的*.inf和*.sys两个文件(这里的*指的是不同驱动程序的文件名,由于用户安装的计算机操作系统不同,所以需要安装的USB驱动程序也不同。
使用Win98操作系统的用户需要安装配套光盘中的Win98驱动;使用Win2000/Xp操作系统的用户需要安装配套光盘中的Win2000/Xp驱动;使用Win Me/NT操作系统的用户需要安装配套光盘中的Win Me/NT驱动。
目录一、手柄说明--------------------------------------- 2二、菜单的设置和使用--------------------------------- 3雕刻机手柄设置说明一、手柄说明停止/取消:停止当前雕刻进度,取消当前设置项;运行/暂停/删除:运行雕刻文件,暂停雕刻进度,删除输入数值;手动模式:可用模式有连续、步进、步进距离可选,用于调节各轴运行模式;归零/确定:操作机器回设置原点,确定当前设置项;菜单:设置机器内的各参数;轴起/轴停:启动/停止主轴电机运转;高速/低速/0:调整主轴电机转速,输入数值0;回零/9:回机器零点,输入数值9;X + / 1:调整X轴向左移动,输入数值1,光标向上移动;X - / 5: 调整X轴向左移动,输入数值5,光标向下移动;Y + / 2:调整Y轴向后移动,输入数值2,增快雕刻速度;Y - / 6: 调整Y轴向前移动,输入数值6,减慢雕刻速度;Z + / 3:调整Z轴向上移动,输入数值3,调整主轴运行模式;Z - / 7:调整Z轴向下移动,输入数值7,调整主轴运行模式;X/Y →0 / 4:将X/Y轴清零,输入数值4;Z→0/8:将Z轴清零,输入数值8;二、菜单的设置和使用1、机床参数设定:机床参数配置是调整控制卡同机床机械特性一致性的配置。
包括:脉冲当量,机床尺寸设置,回零设置,主轴设置,电平定义,脉冲定义,对刀仪厚度,丝杆间隙等。
建议此参数由厂家设置,一旦设置完成,不需客户更改。
更改参数,按相应的数值键,输入完成后按“确定”键保存,输入错误按“删除”键更改,按“取消”键移动光标。
更改属性,按“Y+”和“Y-”键更改。
“取消”键回上级菜单,直到退出。
将手柄通过50针连线连接到机床通电;液晶显示“是否回原点?”,按“确定”键回机床原点,按“删除”键不回机床原点,按“取消”键只有Z轴回原点;回原点操作:原点是指机床的机械零点,所以回原点也称为回零操作。
手动叉车的操作方法
手动叉车是由人力操作的叉车,通常用于轻型货物的搬运。
下面是手动叉车的操作方法:
1. 准备工作:先检查手动叉车的工作状况,确保它没有损坏,并且叉子是干净的,没有杂物。
2. 调整握把:手动叉车的握把可以调整高低,根据自己的身高来调整握把的高度,以确保舒适的操作。
3. 将货物放在合适的位置:将需要搬运的货物放在手动叉车的叉子上,确保货物是稳固的,不会滑落。
4. 控制手柄:手动叉车的操作手柄通常位于握把上方,可以通过向前、向后和旋转控制叉子的运动。
向前推手柄,叉子会抬升;向后拉手柄,叉子会下降。
5. 移动手动叉车:在叉子抬升的状态下,推或拉手柄来移动手动叉车,前进时向前推手柄,后退时向后拉手柄。
当叉子降到最低时,手动叉车会停止移动。
6. 开始搬运:将手动叉车移动到货物需要移动到的位置,然后抬升货物的叉子到合适的高度。
搬运过程中要小心确保货物的平衡和稳固,以防止其滑落或掉落。
7. 放下货物:将货物放置到指定位置后,通过拉手柄将叉子缓慢地降低到地面上。
确认货物稳定后,可以将手动叉车移动至下一个任务地点。
8. 清理工作:结束搬运任务后,清理手动叉车,将其恢复到安全状态。
清除叉子上的杂物,并检查是否有任何损坏需要修理。
请注意,以上操作方法作为参考,具体操作还需参考手动叉车的厂商操作指南和相关安全规定。
使用手动叉车时,务必要注意安全,穿戴适当的防护装备,并遵守相关规定和操作技巧。
电梯注册登记表附表:
1.电梯控制方式:手动手柄操纵控制,自动手柄操纵控制,手动按扭控制,自动按扭控制,集选控制,下集选控制,并联控制,梯群控制,梯群智能控制
2.电梯开门方式:中分双折自动门,中分自动门,交栅手动门,交栅自动门,双折手动门,双折自动门,直分手动门,直分自动门
3.电梯补偿方式:补偿链,补偿绳,补偿缆
4.电梯绳槽型式:半圆形槽,半圆形带切口槽,V型槽
5.电梯缓冲器型式:蓄能型缓冲器,耗能型缓冲器
6.电梯轿厢导轨型式:T型导轨,空心导轨,热轧型钢导轨
7.电梯顶升形式:侧顶式,直顶式,倒拉式
8.电梯设备新旧状况:新,旧
9.电梯拖动方式:交流单速,交流双速,变极调速,交流调压调速,交流变频,直流晶闸管励磁,直流晶闸管直接,柱塞直顶,柱塞侧置,
10.电梯工作环境:露天,非露天,有毒,高温,粉尘,其他工作环境
11.电梯曳引机型式:有齿轮曳引机,无齿轮曳引机,直线轮曳引机,其他曳引机型式
12.电梯安全钳型式:锲块式瞬时式,滚柱式瞬时式,渐进式
13.电梯限速器型式:摆锤式,离心式
14.电梯对重导轨型式:T型导轨,空心导轨,热轧型钢导轨
15.电梯油缸型式:单级,多级
16.电梯监检型式:驻厂监检,口岸检验,电梯其他监检形式
17.自动扶梯制动器型式:块式制动器,带式制动器,盘式制动器
18.自动扶梯梯级型式:整体式,组装式
19.自动扶梯监检形式:监造,口岸检验,型式试验,自动扶梯其他监检形式
20.自动扶梯扶手栏板型式:透明,不透明
21.自动扶梯设备新旧状况:新,旧。