捷联惯导姿态算法若干问题的研究
- 格式:pdf
- 大小:1.75 MB
- 文档页数:6

捷联式惯性导航积分算法设计(连载)上篇:姿态计算
卢军政
【期刊名称】《江南航天科技》
【年(卷),期】2001(000)002
【摘要】本论文分上下两篇,给用于现代捷联惯导系统的主要软件算法设计提供
一个严密的综合方法:将角速率积分成姿态角,将加速度变换或积分成速度以及将速度积分成位置。
该算法是用两速修正法构成的,而两速修正法是具有一定创新程度的新颖算法,是为姿态修正而开发出来的,在姿态修正中,以中速运用精密解析方程去正积分参数(姿态,速度或位置),其输入是由在参数修正(姿态锥化修正,速度遥橹修正以及高分辨率位置螺旋修正)时间间隔内计算运动角速度和加速度的高速算法提供的,该设计方法考虑了通过捷联系统惯性传感器对角速度或比力加速度所进行的测量以及用于姿态其准和矢量速度积分的导航系旋转问题。
本论文上篇定义了捷联惯导积分函数的总体设计要求,并开发出了用于姿态修正算法的方向余弦法和四元数法,下篇着重讨论速度和位置积分算法的设计。
尽管上下两篇讨论中常常涉及到基本的惯性导航概念。
然而,本论文是为那些已对基础惯导概念很熟悉的实际工作者而写的。
【总页数】20页(P14-33)
【作者】卢军政
【作者单位】江南航天集团302所
【正文语种】中文
【中图分类】V249.322
【相关文献】
1.惯性导航系统航向姿态计算算法研究
2.捷联式惯性导航计算机控制系统
3.捷联惯性导航积分算法设计--第一部分:姿态算法
4.捷联惯性导航积分算法设计
5.捷联惯性导航积分算法设计
因版权原因,仅展示原文概要,查看原文内容请购买。
捷联惯导动基座对准新方法及导航误差抑制技术研究一、本文概述随着导航技术的不断发展,捷联惯导系统(Strapdown Inertial Navigation System, SINS)在动基座对准和导航误差抑制方面展现出越来越高的应用价值。
本文旨在探讨一种新型的捷联惯导动基座对准方法,并对导航误差抑制技术进行深入研究。
通过对比分析传统对准方法的不足,本文提出了一种基于多传感器融合的新型对准算法,旨在提高对准精度和效率。
针对导航过程中的误差积累问题,本文还研究了有效的误差抑制策略,以期提高捷联惯导系统的导航精度和可靠性。
本文首先介绍了捷联惯导系统的基本原理和应用背景,阐述了动基座对准和导航误差抑制在惯性导航中的重要性和挑战。
随后,详细介绍了新型对准方法的基本原理和实现过程,包括多传感器数据融合、对准算法设计以及实验验证等方面。
在误差抑制技术研究方面,本文重点探讨了误差来源、误差传播特性和抑制策略,提出了一种基于卡尔曼滤波的误差估计与补偿方法。
本文的研究成果对于提高捷联惯导系统的性能具有重要意义,不仅有助于提升动基座对准的精度和效率,还能有效抑制导航过程中的误差积累,从而提高整个导航系统的可靠性和稳定性。
本文的研究方法和结论也为相关领域的研究人员提供了有益的参考和借鉴。
二、捷联惯导系统概述捷联惯导系统(Strapdown Inertial Navigation System,简称SINS)是一种不依赖外部信息、完全自主式的导航系统。
其核心部件包括陀螺仪和加速度计,分别用于测量载体相对于惯性空间的角速度和线加速度。
通过积分这些测量值,系统能够推算出载体的速度、位置和姿态信息。
捷联惯导系统的最大特点在于它将传统的平台式惯导系统中的实体平台用数学平台来替代,从而大大简化了系统结构,提高了可靠性,并降低了成本。
捷联惯导系统的基本原理是通过载体上安装的陀螺仪和加速度计实时测量载体的角运动和线运动参数,再结合初始对准得到的姿态矩阵,将加速度计测量的比力转换到导航坐标系下,进行积分运算得到速度和位置信息。
第15卷第l期2007年2月中国惯性技术学报JoumalofChineseInertialTcchnologyVbl.15No.1Feb.2007文章编号:1005-6734(2007)01一0024-04车载捷联惯导系统定位测姿算法研究陈允芳1,叶泽田2,钟若飞3(1.山东科技大学地球信息科学与工程学院,青岛266510;2.中国测绘科学研究院,北京100039;3.首都师范大学,北京100037)摘要:GPs/INs组合精确测定平台的位置和姿态是移动测图系统中的重要模块。
对陀螺仪和加速度计所测角速度和比力进行两次积分得载体姿态、速度和位置即sINs力学机械编排。
目前该过程大多在地理坐标系进行。
这里详细推导了地球坐标系中完整的解算过程,以四元数姿态矩阵更新及重力计算为核心,由IMu原始观测值解算出了载体位置、速度和姿态等参数,可快速高效与GPs输出的位置速度信息进行组合滤波处理,可据此编程进行工程应用数据处理。
关键词:捷联惯导系统;姿态矩阵;坐标转换;力学编排;四元数中图分类号:u666.1文献标识码:APositioningandorientationcomputationonVehicle-borneSINSanddiscussofcalculationerrorcHENYun.‰91,YEze-tian2,zHONGRuo.fei3(1.Geo·info衄ationScience&EngineeringCollege,ShandongUniverSi哆ofScienceaIldTbchnology,Qingdao266510,China;2.SurveyingaTldMappingScienceResearchInStituteofChina,Beijing100039,China;3.C印italNomlalUniverSi劬Beijing100037,China)Abstract:GPSandINSintegratedtoaccuratelydeteminingpositionaIldattitudeofnatI‘oofisVitalmoduleinmobilemappingSystem.Specincforcc行omspeedometer蚰d舭glerate矗om留roareinte铲atedtwicerespectiVelytoachievean沁de,veloc时aIldpositionn锄elySINSmechaIlization.Currentlythistookplacedingeogr印hiccoordinate,whiIeheredemonstratedindetailmewholemechaJlizationineanll-centclrcdearth-fixedcoordinate,mostlyquatemiona钍itudematrixupdating锄dgravit)rcaIculation.Ultimatelyvehiclenavigationpar锄eterssuchaSattitude,veIocity锄dpositionwercgahed丘omIMUorigin“0bservations.Mathematicsplatfo眦isfomlcdinSrNStocarryoutsuⅣeyingaJldcalculatingpreciselythenavigationmoVementpar锄cterS.Theresultsarcpronetointe黟atewitllsimilarpammeters疔omGPStofilterprocessing.Pro可锄minghercbyc锄pmcessdatainengineeringapplicationKeywords:SINS;attitudematrix;coordinatetransfomation;mechanization;quatemion随着惯性技术与卫星导航定位技术的发展,由GPS/INs不同程度组合而成的定位定姿传感器已成为移动测图系统中确定载体轨迹和平台姿态的重要工具,其中GPs多用于定位而INS则用于测姿。
动基座条件下舰载武器捷联惯导系统初始对准研究1. 引言1.1 研究背景传统的捷联惯导系统在动基座条件下存在着诸多挑战,如基座的姿态变化、振动等因素会影响系统的捷联性能和初始对准精度。
研究动基座条件下舰载武器捷联惯导系统初始对准成为当前研究领域中的一个重要课题。
为了提高舰载武器系统的精确打击能力和战场生存能力,有必要深入研究动基座条件下捷联惯导系统的初始对准问题,探讨解决方案,优化系统性能。
这不仅对提升我国的军事实力具有重要意义,还对推动捷联惯导技术的发展和应用具有重要意义。
开展动基座条件下舰载武器捷联惯导系统初始对准研究具有重要的实践意义和战略意义。
1.2 研究意义本研究旨在探究动基座条件下舰载武器捷联惯导系统初始对准的问题,具有重要的实际意义和军事价值。
通过对捷联惯导系统的研究,可以提高舰载武器的打击精度和命中率,从而提升海军舰队的作战效能。
研究动基座条件下的挑战和解决方案,对于提升我国军事科技水平具有重要意义。
随着军事技术的不断发展和更新换代,对舰载武器系统的研究和改进势在必行,本研究将为我国海军现代化建设提供重要的技术支持。
本研究具有重要的实际意义和战略意义,对于提高海军舰队的作战效能和保障国家安全具有重要意义。
【内容结束】2. 正文2.1 动基座条件下舰载武器捷联惯导系统简介动基座条件下舰载武器捷联惯导系统是一种集成了捷联惯导技术的舰载武器系统,在对抗复杂环境下能够实现高精度打击目标的能力。
该系统由动基座、惯导系统和传感器组成,可以实现对目标的精确识别、跟踪和打击。
动基座可以根据目标的运动状态和环境变化实时调整武器的姿态,从而提高武器的打击精度和生存能力。
捷联惯导系统则能够利用惯性传感器和GPS等技术实现对目标的精确定位和引导,确保武器能够准确命中目标。
动基座条件下舰载武器捷联惯导系统是一种先进的武器系统,具有高度的精度和灵活性,能够有效应对复杂多变的作战环境,对提高舰载武器的作战效能具有重要意义。
捷联惯导系统的算法研究及其仿真实现Study and Simulation of Strapdown Inertial Navigation System1.1.3捷联惯导系统的发展趋势捷联式惯导系统是从20世纪60年代初开始发展起来的。
20世纪70年代以来,作为捷联系统的核心部件—惯性测量装置和计算机技术有了很大发展,而电子技术、计算机技术、现代控制理论的不断进步,为捷联惯性技术的发展创造了有利条件。
在硬件方面,新一代惯性器件如激光陀螺、光纤陀螺的成功研制,为捷联惯导的飞速发展打下了物质基础。
进入20世纪80-90年代,在航天飞机、宇宙飞船、卫星等民用领域及各种战略、战术导弹、军用飞机、反潜武器、作战舰艇等军事领域开始采用动力调谐式陀螺、激光陀螺和光纤式陀螺的捷联惯导系统。
其中激光陀螺和光纤式陀螺是捷联惯导系统的理想器件。
激光陀螺具有角速率动态范围宽、对加速度和震动不敏感、不需温控、启动时间特别短和可靠性高等优点。
激光陀螺惯导系统己在波音757/767、A310民机以及F-20战斗机上试用,精度达到 1.85km/h 的量级。
20世纪90年代,激光陀螺惯导系统估计占到全部惯导系统的一半以上,其价格与普通惯导系统差不多,但由于增加了平均故障间隔时间,其寿命期费用只有普通惯导系统的15%-20%。
光纤陀螺实际上是激光陀螺中的一种,其原理与环型激光陀螺相同,它克服了由激光陀螺闭锁带来的负效应,具有检测灵敏度和分辨率极高、启动时间极短、动态范围极宽、结构简单、零部件少体积小、造价低、可靠性高等优点。
采用光纤陀螺的捷联航姿系统已用于战斗机的机载武器系统及波音777飞机中。
波音777由于采用了光纤陀螺的捷联惯导系统,其平均故障间隔时间可高达20000h。
采用光纤陀螺的捷联惯导系统被认为是一种极有发展前途的导航系统。
而随着航空航天技术的发展及新型惯性器件关键技术的陆续突破,捷联惯导系统的可靠性、精度将会更高。
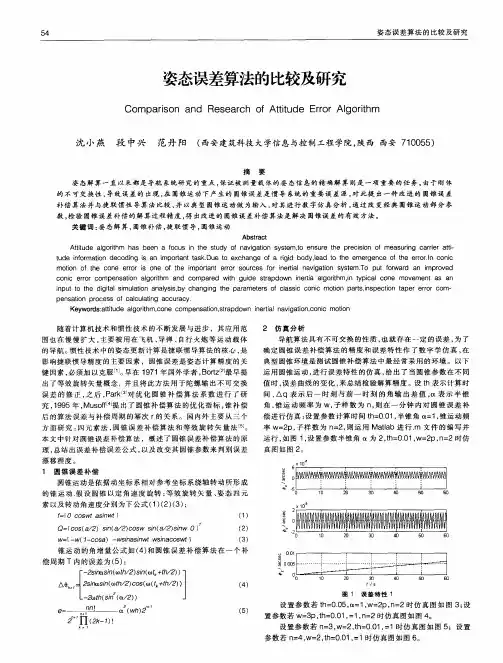
第27卷 第1期航 空 学 报Vol 127No 11 2006年 1月ACTA A ERONAU TICA ET ASTRONAU TICA SIN ICA J an. 2006收稿日期:2004209230;修订日期:2005204227基金项目:国家自然科学基金(60234030)、国家杰出青年科学基金(60225015)和教育部高校青年教师奖资助项目 文章编号:100026893(2005)0120098206捷联惯导姿态算法中的圆锥误差与量化误差练军想,胡德文,胡小平,吴文启(国防科技大学机电工程与自动化学院自动控制系,湖南长沙 410073)R esearch on Coning E rror and Q uantization E rror of SINS Attitude AlgorithmL IAN J un 2xiang ,HU De 2wen ,HU Xiao 2ping ,WU Wen 2qi(Department of Automatic Control ,College of Mechatronics and Automation ,NationalUniversity of Denfense Technology ,Changsha 410073,China )摘 要:对捷联惯导系统的误差源进行了研究,利用几何方法分析了不可交换性误差和量化误差的形成机理,以及它们的相互影响。
针对工程应用中激光陀螺输出脉冲采样量化条件,就多子样算法进行了讨论,并设计了基于MA TL AB/Simulink 的仿真。
研究结果表明,当考虑量化误差的影响时,选取适当的量化因子,三子样等效旋转矢量算法比其它算法具有更好的综合性能。
关键词:捷联惯导;姿态算法;不可交换性误差;量化误差;多子样中图分类号:V249.3 文献标识码:AAbstract :In this paper ,the error sources of strapdown inertial navigation system (SINS )are researched.The mechanism of noncommutativity error and quantization error is illustrated f rom the geometrical point of view ,and the mutual influence between them is analyzed.Considering the sample condition of the output pulses of the ring laser gyroscope (RL G ),the multi 2sample attitude algorithm of SINS is discussed.The simu 2lation is carried out using MA TL AB/Simulink.It is concluded that the three 2sample rotation vector algorithm with the proper quantization factor outperforms others when the impact of quantization errors is taken into ac 2count.K ey w ords :SINS ;attitude algorithm ;noncommutativity error ;quantization error ;multi 2sample 对于捷联惯导系统姿态更新算法的研究,目前国内外同行们有很多成果。