捷联惯导系统原理框图
- 格式:ppt
- 大小:1.34 MB
- 文档页数:30
第六章捷联惯导6-1捷联惯导的原理¾捷联惯导系统概述•捷联惯性技术的发展过程•捷联惯导系统与平台惯导系统的对比¾捷联惯导系统的基本力学编排方程•捷联惯导系统的算法概述•捷联惯导系统原理框图的说明•姿态方程的解算(1)姿态和航向角的计算(2)姿态矩阵的微分方程(3)四元数的运动学微分方程(4)等效旋转矢量法及其微分方程(5)位移角速率方程(6)速度方程•导航位置方程(1)游动方位系与地球系之间的方向余弦矩阵(2)载体位置计算(3)方向余弦矩阵计算•垂直通道阻尼¾捷联惯性器件的余度技术•单自由度陀螺仪的配置方案(1)四陀螺仪配置方案(2)六陀螺仪系统•二自由度陀螺仪的配置方案¾捷联惯导的数值计算方法•数值积分法(1)欧拉法(2)四阶龙格-库塔法•角速率信息的提取“捷联(Strapdown)”这一术语的英文原义就是“捆绑”的意思。
因此,所谓捷联惯性系统也就是将惯性敏感元件(陀螺与加速度计)直接“捆绑”在载体上,从而完成制导和导航任务的系统。
V-2导弹“阿波罗-13”宇宙飞船“海盗”火星降落器从捷联技术的发展过程中我们已经看到捷联系统的优越性已越来越突出的显示出来,并在许多方面已日渐代替平台系统。
为什么会出现这种情况呢?为了回答这一问题,这里从生产与使用的角度将捷联系统与平台系统做一对比。
(1)硬件和软件的复杂程度由于捷联系统没有平台框架及相连的伺服装置,因而简化了硬件;代价是增加了计算机的负担,需要一个比较复杂的实时程序。
(2)可靠性捷联系统的可靠性要比平台系统高,其原因是它的机械构件少,加之容易采用多敏感元件配置,实现余度技术。
(3)成本与可维护性由于平台系统在机械结构上要复杂得多,而对于捷联系统只是算法复杂些,因而从制造成本上看捷联系统的成本要比平台系统低。
从市场供应的情况来看,数字计算机的价格一直在下降,而平台系统的价格一直在上升。
此外,捷联系统比平台系统具有较长的平均故障间隔时间,加之模块设计简化了维修,从而捷联系统的可维护性比平台系统大为提高了。

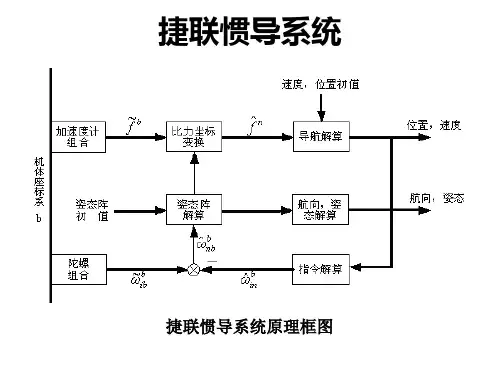

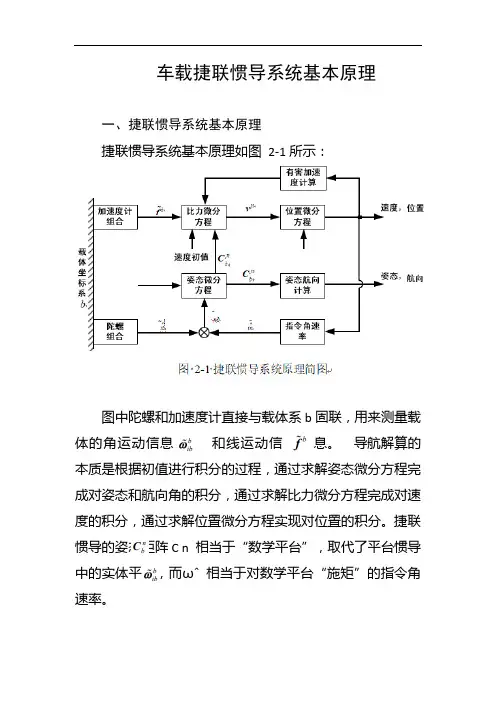
车载捷联惯导系统基本原理一、捷联惯导系统基本原理捷联惯导系统基本原理如图2-1所示:图中陀螺和加速度计直接与载体系b固联,用来测量载体的角运动信息和线运动信息。
导航解算的本质是根据初值进行积分的过程,通过求解姿态微分方程完成对姿态和航向角的积分,通过求解比力微分方程完成对速度的积分,通过求解位置微分方程实现对位置的积分。
捷联惯导的姿态矩阵C n 相当于“数学平台”,取代了平台惯导中的实体平台,而ωˆ相当于对数学平台“施矩”的指令角速率。
二、捷联惯导微分方程(一)姿态微分方程在捷联惯导系统中,导航坐标系n 和载体坐标系b 之间的角位置关系通常用姿态矩阵、四元数和欧拉角表示,相应也存在姿态矩阵微分方程、四元数微分方程和欧拉角微分方程三种形式。
姿态矩阵微分方程的表达式为:在欧拉角微分方程式(2.2-7)中,当俯仰角θ趋于90º时,cosθ趋于0,tanθ趋于无穷,方程存在奇异性,所以这种方法不能在全姿态范围内正常工作;姿态矩阵微分方程式(2.2-1)可全姿态工作,但姿态矩阵更新相当于求解包含9个未知量的线性微分方程组,计算量大;四元数微分方程式(2.2-6)同样可以全姿态工作,且更新算法只需求解4个未知量的线性微分方程组,计算量小,算法简单,是较实用的工程算法。
(二)速度微分方程速度微分方程即比力方程,是惯性导航解算的基本关系式:三、捷联惯性导航算法捷联惯导解算的目的是根据惯性器件输出求解载体姿态、速度和位置等导航信息,实际上就是求解三个微分方程的过程,相应存在姿态更新算法、速度更新算法和位置更新算法。
(一)姿态更新算法求解微分方程式(2.2-6)可得四元数姿态更新算法为:在车辆行驶过程中,一般不存在高频大机动环境,并且车载导航系统往往不工作在纯惯性导航方式,而是利用里程仪或零速条件进行组合导航,所以算法误差的影响有限,常用的5ms采样周期和二子样优化算法即可满足要求。
四、捷联惯导误差模型传感器误差、初值误差和算法误差是SINS的主要误差源,其中器件误差和初值误差又是影响导航结果的主要因素。
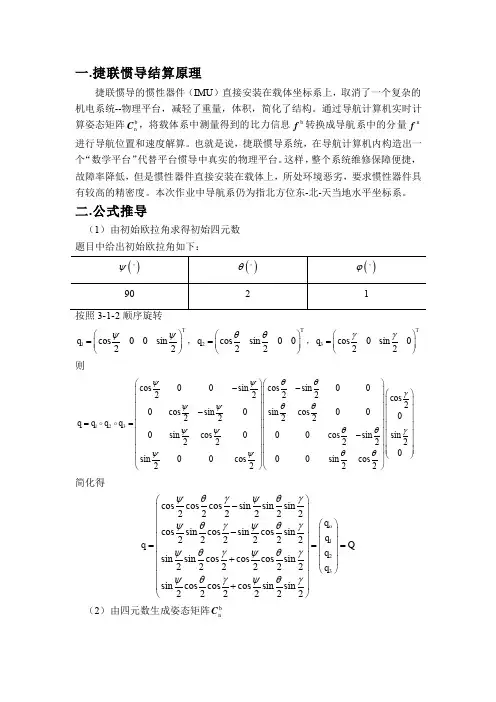

§3.9捷联式惯导系统概论一、概述“捷联”(strap down)这一术语的英文原意就是“捆绑”的意思,因此,所谓捷联系统就是将惯性测量装置的敏感器(陀螺仪与加速度计)直接捆绑在运载体上,从而可实现运动对象的自主导航目的。
平台式惯性导航系统虽然已经达到很高水平,但其造价高、使用十分昂贵。
计算机虽为数字式,但框架伺服系统一般仅采用模拟线路,所以相对来讲,可靠性差一些。
就在平台式惯性导航系统迅速发展的同时,捷联式惯性导航系统也处于研制过程中。
捷联式惯导方案是1956年提出的,当时由于没有满足捷联式系统历要求的惯性元件和计算机,因而没有被采用。
而平台式系统则不断改进、不断完善,达到了相当高的精度,满足了大多数任务的要求。
但是在可靠性和成本方面平台式系统都暴露出一系列严重问题。
与此同时计算技术取得了惊人的进展,克服了捷联式系统发展的一个主要障碍。
捷联式系统的高可靠性和低成本促使人们进—步对它进行新的技术探索。
上世纪六十年代初,美国联合飞机公司首先研制成功了第一个捷联式系统,于1969年成功地应用在阿波罗登月任务中。
捷联式惯性导航系统是将惯性敏感器(陀螺和加速度计)直接安装在运载体上,不再需要物理实现稳定平台的惯性导航系统。
陀螺仪作为角速率传感器而不是作为角位移传感器;加速度计的输入轴不是保持在已知确定方向上,加速度计测量值是运载体瞬时运动方向的加速度值。
通过计算机内的姿态矩阵实时计算而得到一个“数学解析平台”,它同样可以起到机电结合的稳定平台所提供的在惯性空间始终保持所要求的姿态作用。
捷联式惯性导航系统有以下几个主要优点:(1) 惯性敏感器便于安装、维修和更换。
(2) 惯性敏感器可以直接给出载体坐标系轴向的线加速度、线速度、供给载体稳定控制系统。
(3) 便于将惯性敏感器重复布置,从而易在惯性敏感器的级别上实现冗余技术,这对提高系统的性能和可靠性十分有利。
(4) 由于去掉了物理实现的平台,一则消除了稳定平台稳定过程中的各种误差;二则由于不存在机电结合的平台装置,使整个系统可以做得小而轻,并易于维护。
