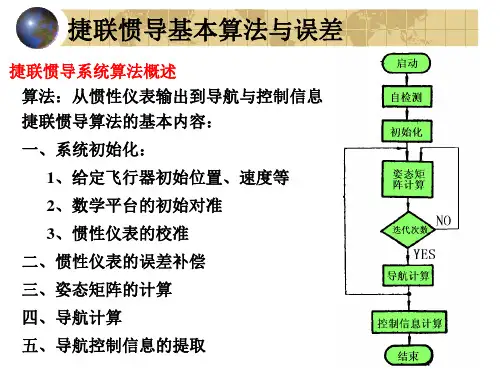
捷联惯导姿态算法中的圆锥误差与量化误差
- 格式:pdf
- 大小:369.60 KB
- 文档页数:6

捷联惯性导航系统的姿态算法研究的开题报告
标题:捷联惯性导航系统的姿态算法研究
一、研究背景
随着现代科技的不断进步,无人飞行器(UAV)的应用越来越广泛,而惯性导航系统作为实现无人飞行器自主飞行的核心设备之一,在飞行控制系统中发挥着重要作用。
其中,姿态算法是惯性导航系统的关键技术之一,能够实现无人飞行器稳定飞行和精确控制。
二、研究目的
本文旨在研究捷联惯性导航系统的姿态算法,探究其改进和优化方法,提高其稳定性和精度,为无人飞行器的自主飞行提供更加可靠的支持。
三、研究内容
(一)姿态解算
姿态解算是捷联惯性导航系统中姿态算法的核心问题。
本文将研究基于四元数的姿态解算方法,并探讨姿态解算的实时性和精度。
(二)滤波算法
针对捷联惯性导航系统中存在的传感器噪声和测量误差等问题,本文将研究常用的滤波算法,如卡尔曼滤波和扩展卡尔曼滤波等,并探讨其在姿态解算中的应用。
(三)姿态控制算法
在实际应用中,无人飞行器需要通过姿态控制实现目标飞行姿态的调整和保持。
本文将研究基于四元数的姿态控制算法,并分析其控制精度和实时性等关键技术。
四、研究方法
本研究将采用理论分析、仿真计算和实验验证相结合的方法,从理论上探究捷联惯性导航系统的姿态算法优化方法,并通过仿真计算和实验验证对算法的效果进行评估。
五、预期成果
本文将研究捷联惯性导航系统的姿态算法,包括姿态解算、滤波算法和姿态控制算法等关键技术。
预期成果为优化和改进现有的算法,提高捷联惯性导航系统的精度和稳定性,为无人飞行器的自主飞行提供可靠的支持。
第13卷第3期中国惯性技术学报2005年6月文章编号:1005-6734(2005)03-0061-03李萨如图在捷联惯导系统圆锥误差估计中的应用刘道静,李立新,纪志农,陈明刚(北京自动化控制设备研究所,北京 100074)摘要:分析了激光陀螺捷联惯导系统产生圆锥运动的原因,给出了估计圆锥误差的一般方法,并在此基础上给出了一种简单、实用的方法---李萨如图法,后者比前者更加接近工程应用。
最后给出了验证试验结果。
关 键 词:捷联惯导系统;圆锥运动;李萨如图;激光陀螺中图分类号:U666.1 文献标识码:AApplication of Lissajous Figures in SINS’s Coning Error EstimationLIU Dao-jing, LI Li-xin, JI Zhi-nong, CHEN Ming-gang(Beijing Institute of Automatic Control Equipment, Beijing 100074, China)Abstract: The coning motion in SINS with three-axis dithered laser gyroscope is discussed. Theclassic method of coning error estimation is described; and based on this, a more effective methodis given, i.e. the method of Lissajous figures. The Lissajous method is more effective and simple,and it’s more close to engineering application. All the above is verified by experiments.Key words: SINS; coning motion; Lissajous figures; ring laser gyroscope0 引 言在捷联惯性导航系统的工程实践中,一般采用四元数法作为姿态更新算法。
捷联惯导系统动态误差的分析与补偿1. 姿态算法中的圆锥误差1.1 圆锥误差的定义圆锥效应是刚体运动的一种几何现象。
刚体受到环境振动影响或本身具有的角运动,使得其在二个正交轴方向存在频率相同的角振动速率时,第三个正交轴在空间将绕其平均位置作锥面或近似锥面的运动,称为刚体的圆锥运动或圆锥效应。
Y 轴:()t ψαcosZ 轴:()t ψαsin其中,α表示圆锥运动的锥半角,ψ表示圆锥运动的角频率。
Y by s对应的角速度矢量在载体坐标系上的分量为ttb zby b xψαψωψαψωαψωcos sin sin sin 2sin22⋅=⋅−=−=该圆锥运动会在载体坐标系b x 轴上产生常值角速度,该角速度具有与陀螺常值漂移相同的性质,该角速度必为b x 轴陀螺所敏感,从而产生视在的测量误差,即圆锥误差。
以上所讨论的两个角振动的相位差为°90,当相位差为ϕ时,同样可以导出b x 轴的常值角速度为ϕαψωsin 2sin22⋅−=b x1.2 仿真示例设载体沿X 轴作典型的圆锥运动⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=Φ)2sin()2cos(0ft ft παπα 仿真条件:o1=α,Hz f 1=,s T 024.0=,s T f 24=其中,t N T∆⋅=为姿态更新周期(N 为一个姿态更新周期内的采样次数,即补偿算法的子样数),f T 为仿真测试时间。
图2 真实姿态角曲线图3 单子样算法(传统算法)的姿态角误差曲线1.3 旋转矢量补偿算法旋转矢量由刚体定点转动的欧拉定理,参考坐标系可通过绕欧拉轴旋转特定的角度与固结于刚体的动坐标系重合。
设欧拉轴上的单位矢量为n r,旋转角度为φ,则旋转矢量定义为[]Tz yxn ΦΦΦ=⋅=Φrφ()21ΦΦ=Tφ图4 旋转矢量在捷联姿态算法中修正圆锥误差的理论基础是Goodman-robinson 的刚体有限转动定理。
根据Goodman-Robinson 定理:刚体在三维空间作任意转动时,其等效旋转矢量)(t Φ在i 轴的分量与刚体运动角速度在i 轴上的分量之间有如下关系式:i tt i i A dt +=Φ∫0ω式中,i A 为由于测量的不可交换性而造成的不可测量项。
捷联惯导摇摆基座自对准中圆锥误差补偿算法
王立冬;刘军;鲁军
【期刊名称】《兵工学报》
【年(卷),期】2012(033)007
【摘要】针对捷联惯导系统(SINS)在摇摆基座上的自对准误差,提出了减小圆锥误差、提高自对准精度的具体圆锥误差补偿算法.分析比较了四元数四阶龙格-库塔算法、等效转动矢量的二子样、三子样等圆锥误差补偿算法及其理论补偿效果.结合仿真和实验结果得出:自对准误差随算法子样数的增大而降低,子样数增加1,北向对准误差减小近1倍,姿态角的离散度降低;随摇摆幅度的增大和频率的提高,三子样补偿算法的自对准精度接近稳定;综合考虑采样频率、子样数、计算量和对准精度要求,选择三子样圆锥误差补偿算法可以满足SINS摇摆基座下的自对准要求.【总页数】5页(P826-830)
【作者】王立冬;刘军;鲁军
【作者单位】军械工程学院,河北石家庄050003;军械工程学院,河北石家庄050003;军械工程学院,河北石家庄050003
【正文语种】中文
【中图分类】U666.12
【相关文献】
1.摇摆基座上基于信息的捷联惯导粗对准研究 [J], 秦永元;严恭敏;顾冬晴;郑吉兵
2.基于罗经法和CDKF的捷联惯导摇摆基座自对准 [J], 马涛;孙尧;高延滨;郭婧
3.基于伪地球坐标系的捷联惯导全球动基座初始对准算法 [J], 刘猛;高延滨;李光春;孟庆文;马文霞
4.圆锥误差补偿算法在三轴激光捷联惯导系统中的应用 [J], 刘道静;李立新;郑辛;纪志农
5.基于四元数的捷联惯导惯性系晃动基座自对准算法 [J], 薛海建;郭晓松;张东方;周召发
因版权原因,仅展示原文概要,查看原文内容请购买。
第21卷第3期2000年8月 兵工学报A CTA A RM AM EN TA R II V o l .21N o.3A ug . 2000减小动态误差的捷联系统姿态算法研究 缪玲娟 林丽 (北京理工大学自动控制系,北京,100081) (国营华北光学仪器厂)摘要 针对陀螺输出信号的两种不同形式,以圆锥运动条件下的圆锥误差和计算量为指标,对捷联惯导系统姿态计算中的旋转矢量算法和旋转矢量迭代算法进行了研究,分析了由角速度提取角增量的方法对旋转矢量算法精度的影响,提出二子样迭代算法不如单步的三子样算法优越。
关键词 捷联惯导系统;四元数;旋转矢量中图分类号 V 241.62+2 捷联惯导系统中,更新姿态矩阵主要是采用四元数法,传统的四元数即时修正通常是采用微分方程直接数值解法,如四阶龙格2库塔法[1](简称算法1)。
当载体处于高机动运动时,这种算法存在因有限转动矢量不可交换而引起的动态误差,通常称为圆锥误差。
缩短修正周期可以减小圆锥误差,但势必增大计算量,旋转矢量算法是克服圆锥误差的有效方法。
以往的文献在研究旋转矢量算法时,都是基于陀螺的输出为角增量,本文将对陀螺输出为瞬时角速度时的旋转矢量算法进行研究。
此外,针对文献中常采用的二子样迭代算法,本文指出,该算法虽然比二子样单步算法优越,但却不如单步的三子样算法优越。
1 四元数的四阶龙格-库塔法设t 时刻载体坐标系b 相对导航坐标系n 的四元数为Q (t ),四元数微分方程为Q(t )=12Ξb nb Q (t )(1.1)其中,Ξb nb 为b 系相对n 系的角速度在b 系上的分量Ξb nb 构成的四元数矩阵,设姿态更新周期为T 。
如采用算法1更新四元数,在一个T 内需要以T 2的周期提供角速率Ξb nb 值[1]。
当陀螺输出为模拟电压时,经A D 采样得到瞬1999年11月收稿,2000年6月定稿。
3总装备部“九五”预研资助项目(9.2.7②)时角速度Ξb ib ,经投影转换成Ξbnb 后,即可由四阶龙格-库塔法直接求取更新后的四元数[1]。
2020年第39卷第11期 传感器与微系统(TransducerandMicrosystemTechnologies)DOI:10.13873/J.1000—9787(2020)11—0029—04捷联惯导算法四子样圆锥截断误差与补偿技术田 慧1,陈一平2,周一览2,张登伟2,佘 玄2,黄腾超2(1.浙江大学医学院附属妇产科医院,浙江杭州310006;2.浙江大学光电科学与工程学院现代光学仪器国家重点实验室,浙江杭州310027)摘 要:圆锥算法可有效补偿捷联惯导系统(SINS)中圆锥运动产生的误差,但引入了圆锥常值漂移误差和圆锥截断误差。
传统圆锥算法通过减小圆锥常值漂移误差来提高算法精度,却忽略了圆锥截断误差的影响。
基于Bortz旋转矢量微分方程,提出采用高阶补偿模型抑制圆锥截断误差,分别仿真了高阶补偿算法和传统四子样圆锥算法及其产生的误差。
仿真结果表明:高阶补偿算法精度优于传统四子样圆锥算法,在高速大幅度圆锥运动条件下,采用高阶补偿算法的捷联惯导系统,姿态精度可提高约2个数量级。
关键词:捷联惯性导航系统;圆锥误差;等效旋转矢量;四子样;高阶补偿中图分类号:V249.3 文献标识码:A 文章编号:1000—9787(2020)11—0029—04ResearchonSINSalgorithmfour sampleconingtruncationerrorandcompensationtechnologyTIANHui1,CHENYiping2,ZHOUYilan2,ZHANGDengwei2,SHEXuan2,HUANGTengchao2(1.Women’sHospital,SchoolofMedicine,ZhejiangUniversity,Hangzhou310006,China;2.StateKeyLaboratoryofModernOpticalInstrumentation,SchoolofOptoelectronicScienceandEngineering,ZhejiangUniversity,Hangzhou310027,China)Abstract:Theconingalgorithmcancompensatetheerrorcausedbytheconingmotionofstrapdowninertialnavigationsystem(SINS)effectively.Butitbringsintheconingconstantdrifterrorandtheconingtruncationerror.Theexitingconingalgorithmsusuallyincreasetheprecisionbyreducingtheconingconstantdrifterror,withoutconsideringtheeffectoftheconingtruncationerror.BasedontheBortz’srotationvectorequation,theconingtruncationerroriscompensatedbyahigher ordererrorcompensationmodel.Simulatingthehigh ordercompensationalgorithmandthetraditionalfour sampleconingalgorithmrespectively,andcomparingtheerrorofeachalgorithm.Thesimulationresultsshowthattheprecisionofhigh ordercompensationalgorithmissuperiortothetraditionalfour sampleconingalgorithm.Undertheconditionofhighspeedandlargeconingmotion,theSINSattitudecontrolprecisioncanbeimprovedabout2ordersofmagnitude.Keywords:strapdowninertialnavigationsystem(SINS);coningerror;rotatevector;four sample;high ordercompensation0 引 言捷联惯导系统(strapdowninertialnavigationsystem,SINS)[1~3]存在圆锥运动时,由于旋转的不可交换性,姿态更新时会产生圆锥误差,严重影响导航精度。
高精度捷联姿态算法设计
余杨;张洪钺
【期刊名称】《中国惯性技术学报》
【年(卷),期】2008(16)1
【摘要】捷联惯性导航系统一般采用圆锥补偿算法来消除圆锥误差的影响,从而提高姿态计算的精度.圆锥补偿算法大致有两种设计思想:首先是基于误差最小化原理,利用Borze旋转矢量进行设计;其次是基于二重积分,利用Goodman-Robinson有限转动定理进行设计.根据这两种设计思想,对二子样优化算法和二子样修正算法进行了详细地推导,然后综合这两种算法的优点形成了一种高精度的捷联姿态算法,并进行了仿真验证.仿真结果表明,改进后的捷联姿态算法在不增加子样数的同时,对圆锥误差的补偿精度大大高于二子样优化算法和二子样修正算法.
【总页数】5页(P39-43)
【作者】余杨;张洪钺
【作者单位】北京航空航天大学,自动化科学与电气工程学院,北京,100083;北京航空航天大学,自动化科学与电气工程学院,北京,100083
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.捷联姿态系统的误差分配算法设计 [J], 陈辞;高洪宇;张崇猛;舒东亮
2.捷联惯性导航积分算法设计--第一部分:姿态算法 [J], Paul G.savage
3.针对高动态载体应用的高精度捷联惯导姿态算法优化方法 [J], 邢丽;熊智;刘建业;赖际舟;孙永荣
4.捷联惯导互补滤波姿态融合算法设计 [J], 杜瑾;赵华超;郑哲;王祥;司迎利
5.高精度捷联惯导姿态算法的性能分析 [J], 徐志浩;周召发;徐梓皓;常振军;郭琦因版权原因,仅展示原文概要,查看原文内容请购买。
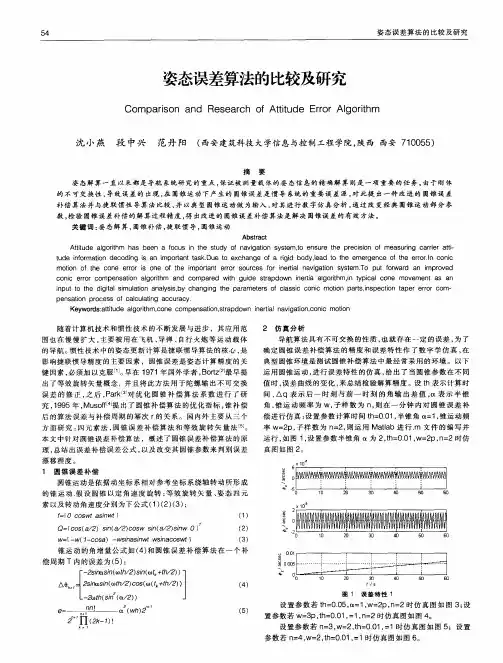
第27卷 第1期航 空 学 报Vo l 27No 1 2006年 1月ACT A A ERON A U T ICA ET A ST RO N AU T ICA SIN ICA Jan. 2006收稿日期:2004 09 30;修订日期:2005 04 27基金项目:国家自然科学基金(60234030)、国家杰出青年科学基金(60225015)和教育部高校青年教师奖资助项目文章编号:1000 6893(2005)01 009806捷联惯导姿态算法中的圆锥误差与量化误差练军想,胡德文,胡小平,吴文启(国防科技大学机电工程与自动化学院自动控制系,湖南长沙 410073)Research on C oning Error and Quantization Error of SINS Attitude AlgorithmLIAN Jun x iang ,H U De w en,H U Xiao ping ,WU W en qi(Department of A utomatic Contr ol,Colleg e of M echat ronics and A utomation,N atio nalU niver sity of Denfense T echno log y,Chang sha 410073,China)摘 要:对捷联惯导系统的误差源进行了研究,利用几何方法分析了不可交换性误差和量化误差的形成机理,以及它们的相互影响。
针对工程应用中激光陀螺输出脉冲采样量化条件,就多子样算法进行了讨论,并设计了基于M A T L A B/Simulink 的仿真。
研究结果表明,当考虑量化误差的影响时,选取适当的量化因子,三子样等效旋转矢量算法比其它算法具有更好的综合性能。
关键词:捷联惯导;姿态算法;不可交换性误差;量化误差;多子样中图分类号:V 249.3 文献标识码:AAbstract:In this paper,the er ror so urces o f str apdow n iner tial nav igat ion system (SIN S)are r esear ched.T he mechanism of nonco mmut ativity er ro r and quantizatio n er ro r is illustr ated fr om the g eometrical point of v iew,and the mutual influence betw een them is analy zed.Considering the sample quantizing co ndition of the o utput pulses of the r ing laser g yro sco pe (R LG ),the multi sample att itude alg or ithm o f SIN S is discussed.T he simu latio n is car ried out using M A T L A B/Simulink.It is co ncluded that the three sam ple rotat ion vector alg or ithm wit h t he pro per quant izat ion factor outper for ms o thers when the impact of quant izat ion err ors is taken into ac count.Key words:SI NS;attitude algo rithm;no nco mmutat ivit y er ror ;quantizatio n er ro r;multi sample对于捷联惯导系统姿态更新算法的研究,目前国内外同行们有很多成果。
普遍的观点认为[1,2]:四元数姿态更新算法比方向余弦和欧拉角等其它方法的计算量小、适应性好;双子样、三子样等效旋转矢量算法在抑制不可交换性误差方面比单子样有显著改善;将姿态更新分成快慢两个回路,即快速回路更新旋转矢量,慢速回路更新姿态参数,既能有效抑制不可交换性误差,还可以减少算法的计算量。
但上述观点很少有结合捷联惯导系统工程实际来考虑的。
本文针对工程中激光陀螺输出脉冲采样量化条件,就多子样算法展开研究,并得出了相应的结论。
1 误差源分析评价算法优劣的最重要的标准之一是算法的精度。
要提高算法的精度就必须研究各种误差及其补偿、抑制方法。
在对惯导系统作原理性分析时,尚可以理想化地认为平台坐标系(平台式或捷联式)准确、无误差地模拟地理坐标系,但实际的惯导系统不可避免地受到各种误差的影响[3]。
通常,可将误差分为源信息误差和解算方法误差。
对捷联惯导系统,解算方法误差是指数值求解姿态矩阵和比力方程时产生的原理性误差,比如不可交换性误差、舍入误差、截断误差等。
源信息误差可分为解析源信息误差和测量源信息误差。
测量源信息误差就是惯性传感器的误差,此类误差因惯性器件的物理原理和仪表的精度不同而各不相同。
比如陀螺的常值漂移和随机漂移、刻度因子误差、非线性误差、输出值的量化误差等。
下面重点对捷联姿态解算时不可交换性误差和陀螺采样的量化误差进行分析。
1 1 不可交换性误差在利用方向余弦矩阵微分方程或四元数微分方程进行姿态更新时,都会遇到角速度矢量的积分问题。
由于刚体有限转动的不可交换性,当转第1期练军想等:捷联惯导姿态算法中的圆锥误差与量化误差动不定轴,即角速度矢量 的方向在空间变化时,对角速度矢量的积分是没有意义的,而且会引入不可交换性误差。
因而,等效旋转矢量 被用来确定载体在姿态变化前后的相对姿态关系[4,5]。
等效旋转矢量的思想来源于:把刚体在一段时间内的转动等效为绕某个定轴矢量的旋转。
该定轴矢量就是旋转矢量,其中,旋转矢量的方向确定旋转轴的指向,旋转矢量的幅值确定旋转的角度。
这样,一个确定的旋转矢量就可唯一地表示一次刚体姿态变化;同样,任何一次姿态变化都可找到相应的旋转矢量来表示。
等效旋转矢量的微分方程可表示为[1]= +12+121-sin2(1-co s)( )(1)其中: 表示旋转矢量; 表示角速度矢量;= ( T )1/2,表示叉乘,下同。
对于不可交换性误差,Goodman Robinson 定理给出了明确的几何解释[6,7]:刚体(具有与之固联的体坐标系OX YZ)作任意角运动,其等效转动矢量 在i轴(i=X,Y,Z)上的投影分量 i与刚体角速度 在i轴上的投影分量 i有如下关系i=!t f t0 i d t+A i(2)其中:A i是i轴在单位球面上运动曲线BC与连接此曲线两端的大圆弧A DC所围成的球面有向面积,即不可交换性误差。
单位球面的球心在体坐标系的原点O,如图1所示。
图1 不可交换性误差的几何解释Fig 1 T he geometric explanation of noncomm utativity error 文献[8]和文献[9]也从圆锥误差的角度进行表述。
事实上,圆锥误差与刚体有限转动不可交换性误差具有相同的性质,圆锥误差就是在三维角振动环境下刚体有限转动产生的不可交换性误差。
为了便于分析,通常选择圆锥运动模型来研究不可交换性误差。
假设刚体存在圆锥运动=[sin t cos t 0]T(3)其中: 为锥运动频率;为半锥角(即等效旋转矢量的幅值)。
设姿态更新步长为h,根据Go odm an Robinson定理,在一个步长中Z轴向的圆锥误差,即特定运动方式下的不可交换性误差,如图2所示。
精确解析表达式推导如下A k=S球面弓形=S球面扇形-S球面三角形(4)其中S球面扇形= S平面扇形d x d y1-x2-y2= h(1-cos)(5) S球面三角形=(∀A+∀O#+∀C-!)R2=2arctancoth2cos+ h-!R2(6)其中:S表示面积;∀A,∀O#,∀C为球面三角形的3个球面角,∀O#= h;R=1,为单位球半径;∀O#的两条夹边等长,为半锥角。
根据球面三角形余弦定理可得出式(6)。
图2 一步长Z轴向圆锥误差的几何解释Fig 2 Th e geometric explanation of conin g er ror in axis Z in one step通过上述推导,一个步长的圆锥误差解析表达式可表示为A k=!- h cos-2ar ctanco th2cos(7) 若使用单子样、双子样、三子样、四子样旋转矢量算法逼近平面弓形,以平面弓形近似球面弓形,则可得到在一个姿态更新步长中各自的圆锥误差表达式[2]。
单子样A^1=112(∀#n-1∀#n)=13sin2sin2 h2sin h(8)99航 空 学 报第27卷双子样A ^2=23(∃#1 ∃#2)=83sin 2 sin 2 h 4sin h 2(9)三子样A ^3=23(∃#1 ∃#2)+712(∃#2 ∃#3)+12(∃#1 ∃#3)=5sin 2 sin 2 h 6sin h 3+2sin 2 sin 2 h 6sin 2 h3(10)四子样A ^4=23(∃#1 ∃#2)+23(∃#3 ∃#4)+12(∃#1+∃#2) (∃#3+∃#4)=163sin 2 sin 2 h 8sin h 4+2sin 2 sin 2 h 4sin h 2(11)1 2 量化误差所谓量化误差,是指不计传感器固有误差,对传感器输出信息进行量化处理,将连续信息变为离散信息时,若传感器的输出端信号为[∀#],真实值是∀#,则量化误差为[10,11]%=∀#-[∀#](12)其中:[∀#]=n &;n 为满足条件n &<∀#的最大整数。
输出信息[∀#]的精度可以达到1个量化因子&的值。
在采样过程中,会遇到针对模拟量的量化和针对脉冲量的量化两种情况,图3和图4分别直观地表示了这两种量化误差的产生机理。
对模拟量进行采样时,一经转化为数字量,被量化掉的部分就永久丢弃,形成量化误差,该量化误差是服从均匀分布的白噪声。
对脉冲量进行量化时,与模拟量的采样量化所不同的是,计数脉冲会将信号脉冲当前周期内的量化误差转到下一个周期,比如,一个周期内有n +0 3个脉冲,则0 3个脉冲被量化掉,但在下一个采样周期内这0 3个脉冲仍被计入。
在这种情况下,脉冲总量不会有误差,但是在每一步量化中仍然会引入误差,特别是在载体高动态运动条件下,脉冲量的量化误差降低了传感器的分辨率,而且由于各轴向耦合影响,也会降低惯性组合的整体测量精度。
但是从总体误差影响上讲,脉冲量的采样量化误差要比模拟量的采样量化误差小,特别在载体动态性能不是很强的条件下,对脉冲量的采样量化要优于对模拟量的采样量化。