三菱伺服电机对应控制软件
- 格式:doc
- 大小:17.00 KB
- 文档页数:2
伺服上位机配置设置软件(使用说明书)伺服上位机配置设置软件V1.0说明书目录一软件介绍 (1)二软件安装 (1)2.1运行环境 (1)2.2安装步骤 (1)三功能介绍 (2)3.1初始界面 (2)3.2参数界面 (6)3.3监控 (10)3.3.1速度图形监控界面 (10)3.3.2位置图形监控界面 (11)3.4辅助功能 (12)3.4.1系统信息界面 (12)3.4.2电机信息界面 (13)3.5系统设置 (14)3.5.1系统设置P06界面 (14)3.5.2采样数据界面 (15)3.5.3凸轮数据界面 (17)3.6帮助 (19)3.6.1驱动器说明书 (19)3.6.2关于 (20)3.7语言切换 (20)3.8退出 (20)一软件介绍伺服上位机配置设置软件是本公司(无锡创正科技有限公司)开发,其作用是方便快捷的操作本公司的伺服驱动器。
本说明书为指导使用者使用“伺服上位机配置设置软件”而编写,希望该手册使他们在使用软件的过程中能起到指导作用。
本手册介绍了如何通过软件对伺服驱动器一些参数的读取和写入以及伺服状态的监控和相关数据的分析。
二软件安装2.1运行环境系统要求:windows7及以上运行环境:NET Framework 3.52.2安装步骤1.伺服上位机配置设置软件安装包,双击setup.exe文件。
2.将会出现以下界面3.安装目录可以根据需要进行更改,建议安装在D盘,按照安装指引一步步进行下去,即可安装完成。
三功能介绍3.1初始界面打开软件后,会出现下面的初始界面,同时它也是主页面。
主界面中的主要对象包括3类:1菜单2工具条3消息提示框各类对象的使用方法介绍如下:1菜单1)图示:菜单的形式如下图所示:2)功能:菜单展示软件的全部功能。
菜单分为主菜单和子菜单,位于屏幕顶端的是主菜单,每一个菜单项具有系统的一大功能,点击某一菜单项可往下拉出另一菜单称为下拉子菜单。
它展示出子功能模块或功能程序。

详解三菱GxWorks2编程调试软件应用三菱 PLC Gx Works2 编程调试软件是用于工程顺控程序的设计、调试、维护的编程工具,掌握好GX 编程调试软件是学习三菱PLC 编程的必经之路。
三菱 Gx Works2 软件的主要功能:1、创建新的顺控程序2、可编程控制器 PLC 参数设置3、注释编辑功能4、软元件存储器的监视5、PLC 的读取 / 写入功能6、所编顺控程序的监视 / 调试7、密码设置及故障诊断功能1编程画面说明1)标题栏:显示工程名及所编顺控程序存放路径。
2)菜单栏:有11个功能菜单,基本类同的功能列入同一个菜单内。
3)工具栏在菜单栏中,使用频率较高的功能,设计成图标键列在工具栏中,以便快捷方便使用。
4)导航窗口将工程内容以树枝状显示在屏幕的左边,点击相关内容可在编程区显示。
5)编制程序区也称工作窗口,编制程序、设置数、监视程序运行。
6)状态栏主要显示使用PLC的型号,顺控程序的步数等。
2PLC参数设置注意事项1)不同型号的PLC参数设置选择卡的内容是不一样的。
例如:FX3U 和 Q 系列 PLC 有很多不同之处。
2)对话框底部按键的作用【默认】:将所有参数设置为出厂设定值;【检查】:检查相关参数设置是否正确,如果有错,出现告错对话框。
【设置结束】:确认被设置的参数,不要忘记按此键。
【取消】:所有已设置的项目参数都被取消。
3PLC参数——存储器容量设置注:存储器容量=注释容量+程序容量+文件寄存器容量+其他特殊容量。
A. 【PLC参数】/【存储器容量设置】;进入设置画面。
B. 【工具】/【存储器容量计算】;进入存储器容量查看画面。
4PLC参数——软元件设置1)普通软件元件—即 PLC 停电后,其值不被保存的软元件2)保持软元件—即 PLC 停电后,其值被保存的软元件5PLC参数——PLC系统设置(1)操作:【PLC参数】/【PLC系统】注: X1 端子接开关控制 PLC 的 RUN / STOP。

三菱 通用 AC伺服SSCNETⅢ/H接口型号MR-JE-_B伺服放大器技术资料集使用前请务必阅读。
在安装、运行、维护及检查前,请务必熟读本技术资料集、使用手册及相关资料,以便正确使用。
请在熟读机器的相关知识、安全信息及注意事项的所有内容后进行使用。
本技术资料集中,分为“危险”与“注意”两类安全注意事项。
危险 操作错误时,可能引起危险,造成死亡或重伤。
注意 操作错误时,可能引起危险,造成中度伤害、轻度伤害或财产损失。
此外,即使注意事项中记载的内容,有时也有造成严重后果的可能性。
两者所记均为重要内容,请务必遵守。
禁止及强制图表的表示内容如下所示。
表示禁止(严禁采取的行为)。
比如“严禁烟火”为。
表示强制(必须采取的行为)。
比如需要接地为。
在本技术资料集中,对不会造成财产损失的注意事项及其它功能等的注意事项作为“要点”进行区分。
仔细阅读本手册后请妥善保管,以便使用者可以随时取阅。
1.防止触电危险因为有触电的危险,所以请在关闭电源并经过15分钟以上,请确认充电指示灯熄灭后再进行接线作业或检查。
而且,确认充电指示灯是否熄灭时,请务必在伺服放大器的正面进行。
伺服放大器及伺服电机必须确保接地良好。
接线作业或检查应由专业技术人员进行。
伺服放大器及伺服电机请在安装后再接线。
否则会造成触电。
请勿用湿手操作开关。
否则会造成触电。
请勿损伤电缆、对其施加过大应力、在其上放置重物或挤压等。
否则会造成触电。
为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带有符号的端子)连接到控制柜的保护接地(PE)上。
使用漏电断路器(RCD)时,请选用B型。
为避免触电,请在电源端子的连接部进行绝缘处理。
2.防止火灾注意请将伺服放大器、伺服电机、再生电阻安装在不可燃物上。
直接安装在可燃物上或安装在靠近可燃物的地方,可能会造成冒烟及火灾。
在电源和伺服放大器的电源(L1・L2・L3)间请务必连接电磁接触器,在伺服放大器的电源侧形成可以切断电源的结构。
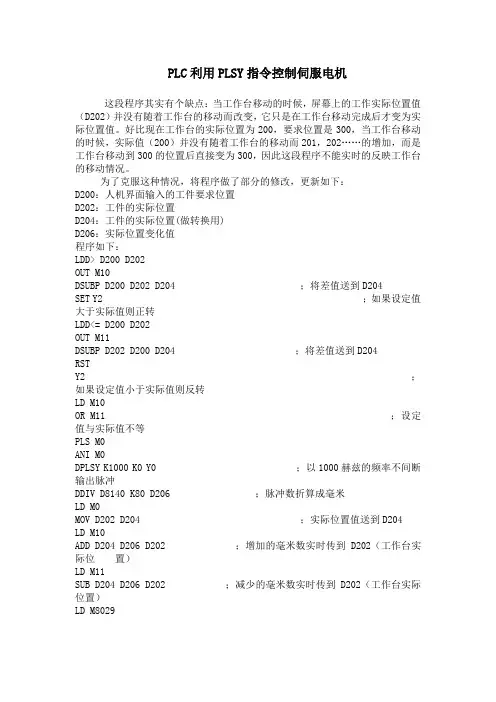
PLC利用PLSY指令控制伺服电机这段程序其实有个缺点:当工作台移动的时候,屏幕上的工作实际位置值(D202)并没有随着工作台的移动而改变,它只是在工作台移动完成后才变为实际位置值。
好比现在工作台的实际位置为200,要求位置是300,当工作台移动的时候,实际值(200)并没有随着工作台的移动而201,202……的增加,而是工作台移动到300的位置后直接变为300,因此这段程序不能实时的反映工作台的移动情况。
为了克服这种情况,将程序做了部分的修改,更新如下:D200:人机界面输入的工件要求位置D202:工件的实际位置D204:工件的实际位置(做转换用)D206:实际位置变化值程序如下:LDD> D200 D202OUT M10DSUBP D200 D202 D204 ;将差值送到D204SET Y2 ;如果设定值大于实际值则正转LDD<= D200 D202OUT M11DSUBP D202 D200 D204 ;将差值送到D204RST Y2 ;如果设定值小于实际值则反转LD M10OR M11 ;设定值与实际值不等PLS M0ANI M0DPLSY K1000 K0 Y0 ;以1000赫兹的频率不间断输出脉冲DDIV D8140 K80 D206 ;脉冲数折算成毫米LD M0MOV D202 D204 ;实际位置值送到D204LD M10ADD D204 D206 D202 ;增加的毫米数实时传到D202(工作台实际位置)LD M11SUB D204 D206 D202 ;减少的毫米数实时传到D202(工作台实际位置)LD M8029DMOV K0 D8140 ;脉冲输出完成后给脉冲计数器清零END。
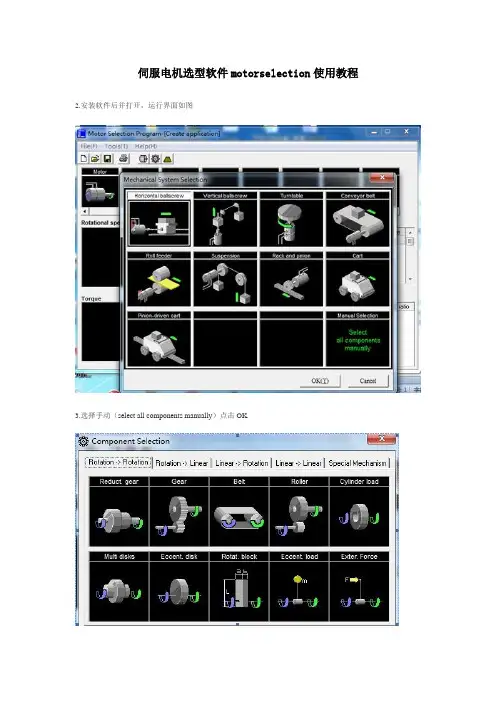
伺服电机选型软件motorselection使用教程2.安装软件后并打开,运行界面如图3.选择手动(select all components manually)点击OK4.首先我们要选择自己运行的设备。
下面我们所用的设备(实际情况选择)在栏目Rotation---Rotation先择双击Reduct.gear,然后在Rotation--Linear栏目选择双击H ballscrew,最后在Linear--Linear栏目选择双击H linear.5.完成以上设备选择后,我们来对它们设定参数。
点击Reduct.gear,然后出现下面窗口。
6.对Reduct.gear参数设定,第一个为减速比(Reduction ratio),没有减速装置的情况下就设定为1,第二个为传输能效比(trans effieiency),一般设定为100%,第三个为轴惯量(input axis inertia)。
7.点击H linear,出现下面H linear参数设定窗口。
8.对H linear参数进行设置,第一个为负载重量(workpiece mass),跟据实际情况设定,第二个为外部作用力(external load),一般不受外力就设定为0,第三个为摩擦系数(friction coefficient),一般设为0.1。
9.点击H ballscrewr出现下面H ballscrew的参数设定窗口。
10.第一个为丝矩(serew pitch),第二个为滚珠丝杆直径(screw diameter),第三个为滚珠丝杆长度(serew length),第四个为滚珠丝杆能效比(rtanster efficiency),第五个为工作台重量(tabel mass),最后一个是摩擦系数(friction coefficient)。
11.点击窗口小梯形图标(如上图标识处),弹出Trapezoidal Patterm窗口12.Operating time 为操作时间,Operating distance为操作距离,设定两者的数值,然后下面选择Accel/decel time(加速时间)。
三菱编程软件GX Works2使用详解在工业自动化领域,PLC(可编程逻辑控制器)是一种重要的控制设备,它可以用来控制各种工业设备和机器。
而GX Works2是三菱电机公司推出的一款专业的PLC编程软件,它具有强大的功能和灵活的操作,可以帮助工程师们轻松地进行PLC编程和调试。
本文将详细介绍GX Works2的使用方法和技巧,希望能够帮助读者更好地掌握这款软件。
一、软件安装和启动。
首先,我们需要从三菱官方网站上下载GX Works2的安装程序,并按照提示进行安装。
安装完成后,双击桌面上的软件图标,即可启动GX Works2。
在软件启动时,我们需要选择相应的PLC型号和通信端口,以便软件能够正确地与PLC 进行通信。
一般情况下,我们可以通过USB接口或者以太网接口来连接PLC和电脑。
二、新建项目和程序。
在GX Works2中,我们可以通过“文件”菜单中的“新建项目”选项来创建一个新的PLC项目。
在新建项目时,我们需要选择PLC的型号和CPU类型,以便软件能够正确地识别和适配PLC。
创建完成项目后,我们可以在项目中新建多个程序,每个程序对应一个特定的功能模块或任务。
在新建程序时,我们需要选择相应的程序类型和语言,比如梯形图、结构化文本、功能块图等,以便软件能够正确地解析和编译程序。
三、程序编写和调试。
在GX Works2中,我们可以通过图形化的界面来编写和编辑PLC程序。
在程序编辑时,我们可以使用丰富的指令库和函数库,以及强大的调试工具,来实现各种复杂的控制逻辑和算法。
在编写程序时,我们需要注意PLC的输入输出地址和数据类型,以便程序能够正确地与外部设备和传感器进行通信和数据交换。
同时,我们还需要注意程序的结构和逻辑,以便程序能够正确地实现预期的功能和任务。
在程序编写完成后,我们可以通过GX Works2中的仿真功能来对程序进行调试和验证。
在仿真时,我们可以逐步执行程序,监视程序的运行状态和变量数值,以便及时发现和排查程序中的错误和问题。
实现三菱P L C触摸屏控制伺服电机HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】实现三菱PLC触摸屏控制伺服电机在plc行业中一直坚持高规格、高性能,得到很多技术人员的青睐,同时,在与伺服电机中也有很好的应用,下面以作为控制元件,GT1155-QFBD-C作为操作元件直接控制三菱伺服电机的具体程序设计伺服电机又称执行电机,它是控制电机的一种。
它是一种用电脉冲信号进行控制的,并将脉冲信号转变成相应的角位移或直线位移和角速度的执行元件。
根据控制对象的不同,由伺服电机组成的伺服系统一般有三种基本控制方式,即位置控制、速度控制、力矩控制。
本系统我们采用位置控制。
PLC在自动化控制领域中,应用十分广泛。
尤其是近几年PLC在处理速度,指令及容量、单轴控制方面得到飞速的发展,使得PLC在控制伺服电机方面也变得简单易行。
1控制系统中元件的选型的选型因为伺服电机的位移量与输入脉冲个数成正比,伺服电机的转速与脉冲频率成正比,所以我们需要对电机的脉冲个数和脉冲频率进行精确控制。
且由于伺服电机具有无累计误差、跟踪性能好的优点,伺服电机的控制主要采用开环数字控制系统,通常在使用时要搭配伺服驱动器进行控制,而伺服电机驱动器采用了大规模集成电路,具有高抗干扰性及快速的响应性。
在使用伺服驱动器时,往往需要较高频率的脉冲,所以就要求所使用的PLC能产生高频率脉冲。
三菱公司的FX3U晶体管输出的PLC可以进行6点同时100 kHz高速计数及3轴独立100 kHz的定位功能,并且可以通过基本指令μs、PCMIX值实现了以倍的高速度,完全满足了我们控制伺服电机的要求,所以我们选用FX3U-48MT-ES-A型PLC。
伺服电机的选型在选择伺服电机和驱动器时,只需要知道电机驱动负载的转距要求及安装方式即可,我们选择额定转距为 N·m,额定转速为3 000 r/min,每转为131 072 p/rev分辨率的三菱公司HF-KE73W1-S100伺服电机,与之配套使用的驱动器我们选用MR-E-70A-KH003伺服驱动器。
plc 编程软件有哪些?7 款PLC 编程软件介绍plc 编程软件有哪些?
1、欧姆龙plc 编程软件
欧姆龙plc 编程软件集成了CX-Programmer V9.5,能够为欧姆龙PLC 编程提供全面的软件支持,本版本为最新版,全面支持32/64 位WIN8 系统,
为多国语言版,支持简体中文。
能为网络、可编程终端及伺服系统、电子温
度控制等进行设置。
适用于已具有电气系统知识(电气工程师或等同者)的
负责安装FA 系统者、负责设计FA 系统者和负责管理和维护FA 系统者使用。
2、三菱PLC 编程软件
三菱PLC 编程软件适用于Q、QnU、QS、QnA、AnS、AnA、FX 等全系列可编程控制器。
三菱PLC 编程软件GX Developer 定位为可编程控制器综合开发平台,支持梯形图、指令表、SFC、ST 及FB、Label 语言程序设计,网络参数设定,可进行程序的线上更改、监控及调试,具有异地读写
PLC 程序功能。
三菱公司目前最新PLC 编程软件。
三菱制定位单元起动伺服电机(步进电机等)顺序书1.前期准备①最小限的参数设定基本参数根据控制对象进行选择.水平、垂直移动装置为mm、旋转装置为degree最佳。
1转的脉冲数输入伺服电机式样书中记载的编码器、伺服电机每1转的分辨力。
1转的移动量根据机械构造,输入伺服电机转1转时装置的移动距离.因皮带轮的径以及钻孔螺丝端部的不同而不同,所以最好与机械设计担当者确认.根据需要进行选择。
如果是步进电机需要进行设定。
根据系统进行选择.零点信号有或无会产生结果不同,需要注意。
基本是負方向,因原点传感器的位置也有正方向的情况。
速度②根据机械构造需要重新设定的参数~31~3急停选择后的移动量设定③三菱伺服电机使用时需要设定的参数2.配线检查①原点传感器上确认原点信号的ON/OFF。
②上下限限制传感器上下限限制信号的ON/OFF。
3.电机旋转方向以及上下限限制传感器的方向确认①JOG运转中确认电机的旋转方向。
+JOG(离开原点传感器的方向)时,伺服电机的现在值增加吗?-JOG(接近原点传感器的方向)时,伺服电机的现在值减少吗?逆运转时,旋转方向的设定(Pr107orPr6)变更为相反的。
②上下限限位传感器方向确认上記①中,电机的旋转方向确认后,再度用+JOG起动伺服电机,如果用150mm标尺灯遮断上限限位传感器,确认伺服电机有没有停止.如果没有停止,再次确认上限限位传感器的配线以及方向性(需要确认上下限限位传感器是否反了。
)。
用同样方法确认下限限位传感器。
4.装置的可动范围的确认上記3.中的旋转方向以及上下限限位传感器的方向的确认作业如果完成了,JOG运转中移动装置至上下限限位传感器起动,确认装置的可动范围.5.原点复位①根据原点复位方式再确认必要的设定项目,特别要注意挡块停止方式时的原点复位扭矩限制值的设定,计数方式时得近点ドグON后的移动量设定要注意是否恰当。
②JOG运转中将装置移动至上下限限位传感器的正中位置,进行原点复位,如果装置移动至远离传感器的方向时,直接使装置停止,变更原点复位方向(Pr46)后,再度进行原点复位。
S7-200系列PLC控制三菱MR-J3伺服的实现作者:杨飞来源:《科技资讯》 2014年第6期杨飞(长城汽车股份有限公司河北保定 071000)摘要:随着科学技术的不断发展、人民生活水平的不断提高,人们对用于生产日常用品的机床的加工精度和生产效率的要求越来越高。
例如,用继电器、接触器控制离合器的形式实现变速,用行程开关实现定位的铣床,这些设备用于汽车零件件的加工,在生产品质和生产效率方面都不能满足生产的需要,这就需要对这些老的设备进行升级改造,使其实现精确地位置控制和速度控制。
本文将对用S7-200系列PLC和三菱MR-J3伺服实现XA6132铣床的位置控制进行论述,铣床的主轴采用普通电机,铣床的进给轴采用伺服电机控制。
关键词:PLC 伺服位置控制中图分类号:TP273 文献标识码:A 文章编号:1672-3791(2014)02(c)-0092-02前言:数控设备已成为目前非常普遍的生产设备,其具有稳定性好、加工精度高等优点,然而很多公司还有一些较老的设备需要进行PLC改造升级,本文帮助大家学习S7-200系列PLC进行位置控制的知识。
1 硬件配置1.1 伺服放大器和伺服电机三菱FR-J3伺服放大器具有高响应性、高精度定位、高水平自动调谐、脉冲序列输入与等优点,基于伺服电机和伺服放大器性价比、性能的综合考虑,选用性价比高的三菱MR-J3伺服放大器和HF-SP三菱伺服电机。
根据实际转矩要求选择相应的型号,本文中选用MR-J3-500A伺服放大器和HF-SP502伺服电机。
1.2 PLC在小型的PLC控制系统中,西门子S7-200系列的PLC具有运行速度快、运行稳定、价格较低等优点,所以选用S7-200系列的PLC对伺服进行控制。
对伺服控制器的控制方式选用集电极开路方式[1]的位置控制模式,伺服的脉冲输入端输入24 V低电平的脉冲,因此,选用24 V低电平输出、并且具有速度控制、位置控制、占空比控制[2]的S7-224XPsi CN DC/DC/DC型号的PLC。
伺服设置软件(MRZJW3-SETUP151E)的使用MR-J2S系列伺服放大器具有RS-232C串行通讯功能,通过伺服设置软件(MRZJW3-SETUP151E),可以进行伺服参数设定、试运行、图形显示和增益调整等功能。
1.使用RS-232C电缆进行通讯当使用伺服设置软件控制一台MR-J2S时,PC机与MR-J2S伺服放大器间需通过RS-232C电缆进行通讯,如下图所示:RS-232C电缆接线图如下图所示:2.伺服设置软件介绍伺服设置软件支持从伺服设定到维护的所有功能,使用该软件,可以方便的实现伺服的监视、诊断、参数读写及测试等功能,具体功能规格如下表所示:3.伺服设置软件的使用以下按现场使用的步骤介绍伺服设置软件的使用:(1)系统设定连接PC与伺服放大器间的RS-232C电缆,打开伺服设定软件,在System / System Setting中进行伺服系统设定,如下图所示:通过下拉菜单选择伺服放大器类型、RS-232C通讯速率及通讯COM口。
在S0004现场进行测试时,9600bps以外的通讯速率不能成功。
(2)通讯检查打开软件Monitor/Display all菜单,如通讯正常,则显示Amplifier Data Display窗口,显示连接伺服信息;如果通讯失败,则显示如下错误提示:出现通讯错误则按提示进行检查,排除错误原因。
通常主要为波特率、通讯口及电缆问题导致通讯失败。
(3)参数设定打开Parameter/Parameters list菜单,如下图所示:在此窗口可以进行伺服参数的读、写、修改、保存等操作,伺服参数容见伺服设定软件帮助“PARAMETER LIST”。
注意:●伺服设定软件帮助“PARAMETER LIST”所列带*参数修改后写入伺服放大器,需对伺服断电一次,再次上电时参数有效。
●伺服放大器站号设定为F。
(4)试运行★注意:试运行开始时伺服电机不连接机械装置!测试正常后再连接机械部分试运行!使用伺服软件对伺服进行试运行,试运行有下列几种方式:●Jog mode点动运行,本模式用来实现点动运行。
另三菱还有一个容量选择软件capacity selection,用于选择伺服电机型号;
三菱伺服软件调试
一、软件基本设置
1、双击SETUP154C图标——设置——系统设定——机种选择“MR——E——A”;——波特率选择“9600”——串口选择“COM3这是看你自己的计算机口了”——有站号——确定;
2、点站号设定:选00站;
3、点击参数——进行“参数设定、调整、变更清单显示、详细信息显示”里——点击“参数设定”——参数一览表“批量读取、核对、批量写入、变更清单、详细信息、初期设定、终止”;
4、参数写入操作步骤:修改表里相应参数值后——回车——点“写入”;注意:有好的参数伺服要停电后5S再启;
三、软件调试运行功能点动运行、定位运行、无电机运行、程序运行
1、试运行
1、点动运行操作
试运行——点动运行——电机转速3000r/min注意设定时不要超过3000转——加减速时间常数1000ms——点正转停止或反转停止即可;
2、定位运行操作
试运行——定位运行——电机转速200r/min注意设定时不要超过3000转——加减速时间常数1000ms——移动量9310720pules——点正转停止或反转停止即可;
3、程序运行操作
试运行——程序运行——点“编辑”——在“程序运行”里点“编辑”——出现“程序运行—编辑”栏,在右边大空白栏里输入以下程序如下:
TIMS3:运行程序3次;
SPN1000:进给转速1000r/min;
STC500:伺服到达额定转速时间500ms;
MOV100000:正转给移动脉冲距离100000PULES;
TIM3 :等待下一步操作时间3秒;
SPN1000:进给转速1000r/min;
STC500 :伺服到达额定转速时间500ms;
MOV-100000 :正转给移动脉冲距离100000PULES;
STOP:停止;
按“确定”——反悔程序运行界面——点“启动”这时电机按你编制的程序要求运行; B系列不需要通过软件设置,定位模块会把参数写入到伺服控制器中;。