电动车控制策略教程文件
- 格式:docx
- 大小:12.52 KB
- 文档页数:4
万向混合动力当前控制策略说明万向混合动力控制策略模块可分为上电控制逻辑模块、动力系统驱动模块、辅助系统管理模块、故障诊断处理模块等几个部分。
下面就控制策略中主要的两个模块--上电逻辑模块和动力系统驱动模块—进行详细说明。
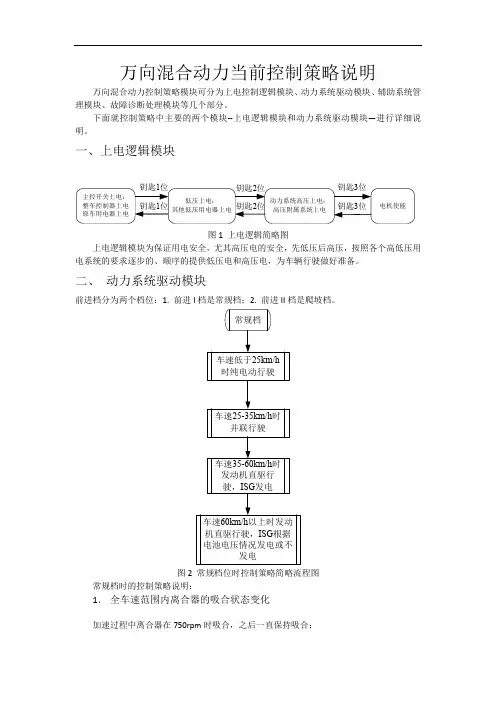
一、上电逻辑模块图1 上电逻辑简略图上电逻辑模块为保证用电安全,尤其高压电的安全,先低压后高压,按照各个高低压用电系统的要求逐步的、顺序的提供低压电和高压电,为车辆行驶做好准备。
二、动力系统驱动模块前进档分为两个档位:1. 前进I档是常规档;2. 前进II档是爬坡档。
图2 常规档位时控制策略简略流程图常规档时的控制策略说明:1.全车速范围内离合器的吸合状态变化加速过程中离合器在750rpm时吸合,之后一直保持吸合;减速过程中离合器在660rpm时分离,之前一直保持吸合。
2.车速在25km/h(主电机转速约750rpm)以下时,离合器分离,主电机单独进行驱动,发动机驱动ISG进行发电—车辆处在纯电动行驶状态;为了节约使用电池能量,选择750rpm作为离合器吸合的转速,有两个主要原因:1)要和减速时离合器分离的转速有一个可靠的转速差,这里选择90rpm,防止在设定的转速时离合器不断的分离和吸合;2)考虑到发动机怠速驱动ISG发电为电池充电的能量传递环节的效率较低,会增加燃油消耗,所以尽量少的使车辆处在纯电动行驶状态。
所以离合器吸合转速选择在发动机怠速值650rpm以上的750rpm。
3.车速高于25km/h时,离合器吸合,主电机退出驱动;在25km/h到35km/h(主电机转速1100rpm)之间时,发动机和ISG电机驱动车辆行驶—车辆处在并联行驶状态;此车速范围内,为了改善动力性ISG电机提供助力,是是考虑到发动机转速刚刚高于怠速,能够提供的扭矩较小,ISG电机助力到发动机能够提供的最大扭矩约800Nm时停止助力,并且使发动机尽快到达经济区。
此后发动机提供的扭矩随着转速上升迅速上升到最大扭矩。
新能源纯电动汽车整车上下电控制策略设计介绍一、前言为了提高整车高压上下电安全,准确诊断出整车动力系统的高压故障并迅速做出相应处理,本文针对纯电动汽车动力系统结构,定义了基于CAN通讯的整车控制网络。
以整车安全性为主要参考量,设计了电动汽车整车控制器上电控制策略、下电控制策略以及紧急故障模式下对高压电紧急下电和低压电处理方法,为调试整车控制器及相应的高低压设备奠定基础。
电动汽车展示二、高压控制的重要性纯电动汽车(EV)以动力蓄电池组作为唯一动力源,以驱动电机作为唯一动力驱动装置。
蓄电池工作电压高达几百伏,当发生高压电路绝缘失效或短路等故障时,会直接影响驾乘人员的生命财产以及车载用电器的安全。
因此,在设计和规划高压动力系统时应充分考虑整车和人员的电气安全性,确保车辆运行安全、驾驶人员安全和车辆运行环境安全。
整车控制器(VCU)是纯电动汽车运行的核心单元,担负着整车驱动控制、能量管理、安全保障、故障诊断和信息处理等功能,是实现纯电动汽车安全高效运行的必要保障。
纯电动汽车上下电控制策略开发设计的目的在于:在已有整车动力系统结构的前提下,通过采集钥匙及踏板等驾驶员动作信号,并通过CAN总线、电池管理系统(BMS)及电机控制器(MCU)等子系统进行通讯,来控制整车高压上电、下电安全。
同时在上下电过程中,力求准确诊断出整车动力系统的高压故障并迅速做出相应处理。
目标车型钥匙门开关设置为两挡:OFF挡、ON挡;整车挡位设置为:前进挡(D挡)、空挡(N挡)、倒挡(R挡)。
表1为各主要部件缩略语及其定义。
表2为各变量名称及说明。
表1主要部件缩略语及其定义表2各变量名称及说明三、整车上下电控制策略1、整车模式说明基于钥匙门位置设置,进行上下电控制,实现整车控制系统初始化、自检、充电状态判断等功能。
目标车型整车控制器由低压蓄电池供电,其上电下电状态由仪表板上的低压开关进行控制。
整车模式分为外接充电模式、非充电模式和紧急停机模式。
电动车控制策略电动车控制策略1.整车通信协议按照客户提供的文件执行。
2.上电策略a)Key On时对MCU进行预充电。
b)预充电由VCU控制。
c)预充电阻规格为(200欧姆,200W,(一个或者两个预充回路,待定)d)预充条件:i.Key Onii.充电枪未连接iii.BMS无一级警报(最严重)e)预充过程:i.闭合预充电继电器5sii.MCU两端电压达到电池电压的95 %iii.满足以上两条后,可以闭合主接触器,然后断开预充电继电器。
f)特殊要求:i.BMS一级故障并请求切断总正高压时,需要接收到VCU的报文回复后,才能切断主回路。
VCU需在15秒内完成以下操作:1.15s内将输出扭矩从当前值线性置0。
2.回复BMS可以切断总正高压。
3.若在15s内BMS的切断高压请求消失,则线性恢复正常输出。
4.若VCU5s内无回复(BMS未收到VCU报文),则BMS自行处理。
ii.若BMS未请求切断总正高压,但VCU在紧急情况下(例如超速),可以将电流降为0,切断MCU高压。
3.DC/DC控制:(DCDC不在CAN上,通过硬线控制,低电平有效)a)DC/DC,油泵,气泵,空调使用同一个高压开关,由VCU控制b)由VCU通过硬线控制DC/DC启动,启动条件:i.主继电器闭合,并延时2s后,闭合高压回路ii.BMS无一级故障iii.高压回路闭合后,延时1s,发送硬线启动信号4.油泵控制:(油泵不在CAN上,通过硬线控制,低电平有效)a)由VCU通过硬线控制油泵启动,启动条件:i.主继电器闭合,并延时2s后,闭合高压回路ii.BMS无一级故障b)Ready后,发送硬线启动信号,并一直保持5.气泵控制:(气泵不在CAN上,通过硬线控制,低电平有效)a)由VCU通过硬线控制气泵启动,启动条件:i.首次开机时:1.主继电器闭合,并延时2S 后,闭合高压回路,2.BMS无一级故障3.高压回路闭合后,延时1s,发送硬线启动信号,然后判断下列条件。
XXX项目VCU控制策略江苏新能源有限公司编制:____________审核:____________批准:____________Document NameVCU系统目录目录 2版本历史 (5)修订历史 (5)第1版 (5)文档简介 (6)文档目的 (6)使用对象 (6)文档构成 (6)信息获得 (6)需求文档 (6)术语 (8)定义 8VCU 整车控制器总成 (8)缩略语 (8)产品原理 (9)VCU系统原理图 (9)整车高压系统框图 (9)整车网络拓扑 (10)VCU输入输出列表 (10)电源管理 (12)VCU系统功能简介 (13)VCU功能汇总及功能描述 (13)高压上下电功能 (15)功能概述 (15)系统框图 (15)驱动高压上电功能描述 (15)驱动高压上电功能框图 (15)驱动上电功能 (16)驱动下电功能描述 (19)驱动高压下电功能框图 (19)驱动下电功能 (19)碰撞绝缘故障下电 (21)功能框图 (22)功能逻辑 (22)一般故障下电功能 (23)功能框图 (23)功能逻辑 (24)充电上电 (27)功能框图 (27)功能逻辑 (27)充电下电 (30)功能框图 (30)功能逻辑 (30)高压上下电仲裁功能描述 (31)充电工况的优先级高于驱动工况 (31)满足以下两个条件之一,则可以判断处于充电工况 (31)不在充电工况,满足以下任一条件,则处于驱动工况 (31)Document NameVCU系统驱动功能说明 (32)挡位识别 (32)功能框图 (32)功能逻辑 (32)驾驶模式识别 (34)功能框图 (34)功能逻辑 (34)滑行回馈功能 (36)功能框图 (36)功能逻辑 (36)制动工况回馈扭矩响应 (39)功能框图 (39)功能逻辑 (39)驱动扭矩控制 (41)功能框图 (41)功能逻辑 (42)扭矩解析功能流程图 (43)挡位防盗 (45)功能框图 (45)功能逻辑 (45)最高车速限制 (45)功能框图 (45)功能逻辑 (46)蠕行功能 (46)功能框图 (46)功能逻辑 (47)跛行回家 (47)功能框图 (48)功能逻辑 (48)坡起辅助功能 (48)功能框图 (48)功能逻辑 (49)高压互锁防护 (51)功能框图 (51)功能逻辑 (51)VCU控制高压互锁S+发送PWM信号(低有效、频率100Hz、占空比50%)进入条件: (51)VCU控制高压互锁S+发送PWM信号退出条件: (51)高压互锁功能执行动作: (51)碰撞防护 (52)功能框图 (52)功能逻辑 (52)真空泵控制 (53)功能框图 (53)功能逻辑 (53)热管理功能 (54)热管理系统框图 (54)高压散热功能 (54)功能框图 (54)功能逻辑描述 (54)空调加热功能 (55)Document NameVCU系统功能框图 (55)功能逻辑描述 (56)空调制冷功能 (56)功能框图 (56)功能逻辑描述 (56)动力防盗 (58)动力防盗功能 (58)功能框图 (58)功能逻辑描述 (58)附件管理功能 (60)DCDC管理功能描述 (60)DCDC管理功能概述 (60)DCDC管理功能示意图 (60)DCDC管理功能详述 (60)剩余里程显示功能 (62)剩余里程显示功能概述 (62)剩余里程计算功能示意图 (62)剩余里程计算功能详述 (62)剩余里程计算功能进入条件 (62)剩余里程功能计算 (62)剩余里程退出条件 (62)故障处理功能 (63)故障故障处理功能概述 (63)故障显示和处理功能示意图 (63)故障分级 (63)故障处理功能详述 (65)网关功能 (66)功能描述 (66)系统框图 (66)信号及报文路由 (66)通讯接口 (67)接口类型 (67)参数要求 (67)BootLoader功能 (67)产品技术参数 (68)特性参数 (68)信号定义 (69)CAN通信矩阵 (69)CAN网络诊断 (69)下线匹配 (69)Document NameVCU系统版本历史修订版本日期所有者描述修订历史第1版建立XXX项目VCU控制策略.Document NameVCU系统文档简介文档目的本文档描述XXX纯电动车型的VCU的硬件接口及所有逻辑策略。
学习任务3 纯电动汽车的控制策略任务目标任务目标能够正确的认识纯电动汽车的控制策略的功用和设计思路。
能够掌握对加速转矩控制策略、制动能回馈控制策略、驱动转矩的功率限制策略的分析方法学习重点对纯电动汽车控制策略的分析和设计。
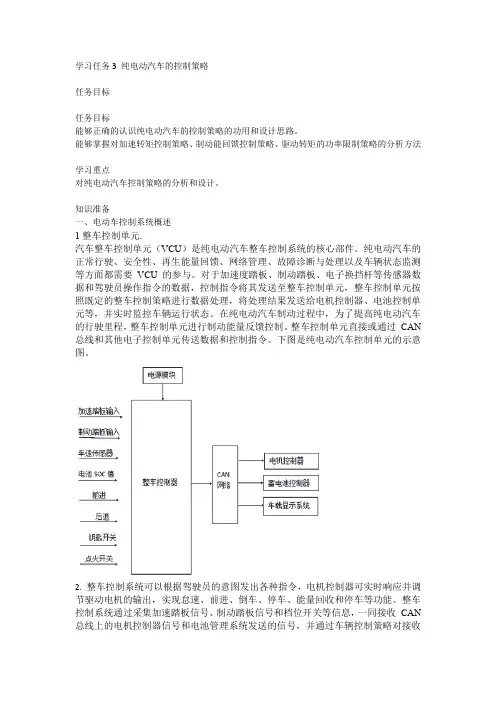
知识准备一、电动车控制系统概述1整车控制单元.汽车整车控制单元(VCU)是纯电动汽车整车控制系统的核心部件。
纯电动汽车的正常行驶、安全性、再生能量回馈、网络管理、故障诊断与处理以及车辆状态监测等方面都需要VCU 的参与。
对于加速度踏板、制动踏板、电子换挡杆等传感器数据和驾驶员操作指令的数据,控制指令将其发送至整车控制单元,整车控制单元按照既定的整车控制策略进行数据处理,将处理结果发送给电机控制器、电池控制单元等,并实时监控车辆运行状态。
在纯电动汽车制动过程中,为了提高纯电动汽车的行驶里程,整车控制单元进行制动能量反馈控制。
整车控制单元直接或通过CAN 总线和其他电子控制单元传送数据和控制指令。
下图是纯电动汽车控制单元的示意图。
2.整车控制系统可以根据驾驶员的意图发出各种指令,电机控制器可实时响应并调节驱动电机的输出,实现怠速、前进、倒车、停车、能量回收和停车等功能。
整车控制系统通过采集加速踏板信号、制动踏板信号和档位开关等信息,一同接收CAN 总线上的电机控制器信号和电池管理系统发送的信号,并通过车辆控制策略对接收到的数据信息进行分析判断,获取驾驶员的驾驶意图和车辆行驶状态,最后利用CAN 总线发出指令,控制各部件控制器的工作,从而保证车辆正常行驶3、整车控制策略的功用纯电动汽车驱动系统中主要有电机驱动装置,传动系统,动力电池等。
必须有一个性能优越、安全可靠的整车控制策略,从各个环节上合理控制车辆的运行状态、能源分配和协调功能,以充分协调和发挥各部分的优势,使汽车整体获得最佳运行状态。
整车控制策略主要包括:(一) 汽车驱动控制。
根据司机的驾驶要求、车辆状态、道路及环境状况,经分析和处理,向电机控制器发出相应指令,满足驾驶要求。

电动自行车永磁同步电机控制器的控制策略文件电动自行车的永磁同步电机控制器是控制电动自行车动力系统的核心部件之一,其控制策略对于电动自行车性能的提升至关重要。
本文将从永磁同步电机控制器的功能和作用、控制策略的分类及特点、控制器的调试和优化等方面进行探讨,以期为电动自行车行业的从业者和爱好者提供一些有价值的参考和指导。
一、永磁同步电机控制器的功能和作用永磁同步电机控制器是电动自行车动力系统中的重要部件,其主要功能是控制电动自行车的加速、减速、制动等动作,并对电机进行实时监测和保护。
作为电动自行车的“大脑”,永磁同步电机控制器能够根据不同的工况和需求,对电机进行精准的控制和调节,以实现高效、平稳、安全的运行。
二、控制策略的分类及特点在实际的永磁同步电机控制系统中,根据其控制方式和特点,可以将控制策略分为开环控制和闭环控制两种。
1.开环控制开环控制是指控制系统只根据输入信号来控制输出,没有对输出进行实时监测和调节的闭环控制方式。
在电动自行车中,开环控制主要应用于简单的电机控制系统,其特点是结构简单、成本低廉,适用于对电机控制精度要求不高的场合。
2.闭环控制闭环控制是指控制系统通过不断对输出信号进行监测和调节,以实现输入和输出之间的精准匹配。
在电动自行车中,闭环控制主要应用于对电机控制精度要求较高的场合,如提高加速度的同时保持良好的平稳性、对动力系统进行智能化优化等。
三、控制器的调试和优化在实际的电动自行车生产和使用过程中,控制器的调试和优化是至关重要的环节。
通过合理的控制器调试和优化,可以有效提升电动自行车的性能和使用体验,延长电机和控制器的使用寿命。
1.参数设置控制器的参数设置是控制器调试和优化的重要环节之一。
根据具体的电机型号和要求,确定控制器的电流、电压、转速等参数,并进行适当的调整和优化。
2.工况仿真通过工况仿真,可以模拟电动自行车在不同路况和工况下的运行情况,进而对控制器进行实时监测和优化调整,以确保电动自行车在各种情况下均能有良好的性能表现。
电动自行车永磁同步电机控制器的控制策略文件The control strategy file for the permanent magnet synchronous motor (PMSM) controller of an electric bicycle is a crucial component that determines the overall performance and efficiency of the vehicle. It involves various parameters and algorithms that govern how power is distributed and utilized in order to achieve optimal operation.电动自行车永磁同步电机控制器的控制策略文件是决定整车性能和效率的关键部分。
它涉及各种参数和算法,用于管理功率的分配和利用,以实现最佳运行。
One important aspect of a control strategy file is the torque control algorithm. This algorithm regulates the amount of torque generated by the motor based on input from the rider, such as throttle position or pedal speed. It ensures that the motor provides sufficient power when needed, while minimizing energy consumption during low-demand scenarios.一个控制策略文件中重要的部分是扭矩控制算法。
该算法根据骑行者的输入,如油门位置或踏板速度,调节电机产生的扭矩大小。
电动自行车永磁同步电机控制器的控制策略文件一、引言随着社会科技的不断进步,电动自行车作为一种绿色、环保的代步工具,得到了越来越多人的青睐。
而电动自行车的核心部件之一就是永磁同步电机控制器,它是控制电动自行车驱动电机运行的关键设备。
永磁同步电机控制器的控制策略直接影响到电动自行车的性能和驾驶体验。
因此,合理的控制策略对于提高电动自行车的性能和驾驶舒适度至关重要。
二、永磁同步电机控制器的工作原理永磁同步电机是一种高效、低噪音、高转矩、高性能的电机,它由定子和转子两部分组成。
永磁同步电机控制器通过控制电流和频率来控制电机的运行状态,实现电动自行车的加速、减速、停止等功能。
通常,永磁同步电机控制器采用空间矢量调制(SVPWM)技术来控制电机。
三、永磁同步电机控制器的控制策略1. 转速控制策略永磁同步电机的转速是通过控制电机的电流和频率来实现的。
通常采用PID闭环控制方法来控制电机的转速,以达到设定的目标转速。
在启动时,电流和频率逐渐增加,使电机缓慢加速;在运行过程中,根据反馈信号调整电流和频率,以维持电机的稳定运行。
2. 转矩控制策略永磁同步电机的转矩是由电流控制的。
在正常情况下,电机的转矩与电流呈线性关系。
通过调整电流大小和相位来控制电机的转矩输出,以满足不同驾驶条件下的需求,如爬坡、加速或匀速行驶。
3. 能量回馈控制策略为了提高电动自行车的能效,可以采用能量回馈控制策略。
在减速和制动时,将电机转换为发电机,将制动能量转换为电能储存到电池中,以延长电池的续航里程。
通过控制电机的电流和频率来实现能量回馈的控制。
4. 过流、过温保护策略为了保护电机和控制器的安全运行,可以设置过流和过温保护机制。
当电机超载或过热时,控制器会自动切断电流,以避免损坏电机和控制器。
四、总结永磁同步电机控制器是电动自行车的关键部件之一,其控制策略直接影响到电动自行车的性能和驾驶体验。
通过合理的转速控制、转矩控制、能量回馈控制和过流、过温保护策略,可以提高电动自行车的性能、提高能效和延长电池寿命,提升用户的驾驶体验。
电动车控制策略
电动车控制策略
1. 整车通信协议按照客户提供的文件执行。
2. 上电策略
a)K ey On时对MCU进行预充电。
b)预充电由VCU控制。
c)预充电阻规格为(200欧姆,200W,(—个或者两个预充回路,待定)
d)预充条件:
i. Key On
ii. 充电枪未连接
iii. BMS无一级警报(最严重)
e)预充过程:
i. 闭合预充电继电器5s
ii. MCU两端电压达到电池电压的95 %
iii. 满足以上两条后,可以闭合主接触器,然后断开预充电继电器。
f)特殊要求:
i. BMS 一级故障并请求切断总正高压时,需要接收到VCU的报文回复后,才能
切断主回路。
VCU需在15秒内完成以下操作:
1.15s内将输出扭矩从当前值线性置0。
2. 回复BMS可以切断总正高压。
3. 若在15s内BMS的切断高压请求消失,则线性恢复正常输出。
4. 若VCU5S内无回复(BMS未收到VCU报文),贝U BMS自行处理。
ii. 若BMS未请求切断总正高压,但VCU在紧急情况下(例如超速),可以将电流降为0,切断MCU高压。
3. DC/DC控制:(DCDC不在CAN上,通过硬线控制,低电平有效)
a)D C/DC,油泵,气泵,空调使用同一个高压开关,由VCU控制
b)由VCU通过硬线控制DC/DC启动,启动条件:
i. 主继电器闭合,并延时2s后,闭合高压回路
ii. BMS无一级故障
iii. 高压回路闭合后,延时1s,发送硬线启动信号
4. 油泵控制:(油泵不在CAN上,通过硬线控制,低电平有效)
a)由VCU通过硬线控制油泵启动,启动条件:
i. 主继电器闭合,并延时2s后,闭合高压回路
ii. BMS无一级故障
b)R eady后,发送硬线启动信号,并一直保持
5. 气泵控制:(气泵不在CAN上,通过硬线控制,低电平有效)
a)由VCU通过硬线控制气泵启动,启动条件:
i. 首次开机时:
1. 主继电器闭合,并延时2S后,闭合高压回路,
2. BMS无一级故障
3. 高压回路闭合后,延时1s,发送硬线启动信号,然后判断下列条件。
a)前后任意气压信号低于0.68Mpa/接到气压警报信号b)气泵停止条件:
i. 前后气压均高于0.8Mpa,并延时30s
c)特殊要求:
i. 若VCU接收不到气压值,则持续输出使能。
6. 空调控制:(空调不在CAN上,通过硬线控制,低电平有效)
a)主继电器闭合,并延时2s后,闭合空调高压回路
b)由VCU通过硬线控制空调停机,停机条件:
i. SOC低于20%
ii. BMS 一级故障
7. 下电时序:
a) Key On切断后,先断开电附件使能,然后延时500ms,再切断电附件及高压接触器8. 换档器策略:
a)换档时需踩刹车。
b)D到R之间的转换需要经过N档。
c)车速低于5km/h时才允许换挡
9. Ready条件(Ready后,可以挂档)
a)B MS,MCU,VCU 自检成功
b)B MS,MCU,VCU无一级故障
c)主继电器闭合
d)接收到Key Start信号
10. 互锁(输出扭矩置0)
a)充电枪连接
b)气压达到设定值(0.5Mpa)
11. 回馈策略
a)车速小于5km/h时,取消制动回馈
b)回馈时按照报文中回馈电流要求执行
12. 手刹策略
a)无
13. BMS故障处理:
a)V CU使用BMS报文中的60s最大短时充放电电流作为电流限值(做平滑处理)。
b)行车过程中:
i. 三级故障:降30%功率
ii. 二级故障:降50%功率
iii. 一级故障:降70%功率,并持续12s后
1. 若车速仍大于0,则输出扭矩置0,直到停车
2. 停车后,可断开电机接触器(VCU报文回复允许),但保持电附件接触
器。
14. 冷却策略:
a)风扇策略:
i. VCU输出2路PWM信号,控制2个水箱风扇(无刷风扇)。
ii. 首次开机启动15s (两个风扇都启动)
b)水泵策略:
i. 电机转速不为0时,VCU输出一个高电平信号(J1.A1),控制水泵运行。
ii. 首次开机启动15s
15. 刹车灯输出:
a)电制动时,VCU输出低电平有效信号,用于点亮刹车灯。