解耦控制实验报告
- 格式:docx
- 大小:186.94 KB
- 文档页数:5
第50卷第4期中南大学学报(自然科学版) V ol.50No.4 2019年4月Journal of Central South University (Science and Technology)Apr. 2019 DOI: 10.11817/j.issn.1672−7207.2019.04.013多轴车辆轮桥加载试验台的解耦控制实验研究王慧1, 2,赵国超1,金鑫1(1. 辽宁工程技术大学机械工程学院,辽宁阜新,123000;2. 哈尔滨工业大学机电工程学院, 黑龙江哈尔滨, 150001)摘要:为研究多轴车辆轮边和传动桥的工作特性和可靠性,模拟四轴车辆的实际工况,基于二次调节技术试制轮桥模拟加载试验台。
针对轮桥试验台驱动转速和输出转矩存在的耦合干扰问题,建立系统传递函数并求解出传递函数之间的对角矩阵,利用对角矩阵对系统进行解耦控制,通过轮桥模拟加载试验台进行耦合干扰实验及解耦控制实验。
研究结果表明:通过对角矩阵对试验台进行解耦控制,能有效解决驱动转速和输出转矩之间的耦合干扰问题,本实验中驱动转速误差减小78%,二次输出转矩误差减小67%,轮边输出转矩误差减小29%,解耦后提高了试验台可控性,可使试验台满足车辆轮桥的动态模拟加载实验的需求,研究结果可为此类轮桥试验台的设计及模拟加载实验提供一定的实验基础。
关键词:多轴车辆;传动桥;试验台;解耦控制;模拟加载中图分类号:TH113; TP302 文献标志码:A 文章编号:1672−7207(2019)04−0854−10Experimental study on decoupling control forwheel-bridge simulated test bench of multiaxial vehiclesWANG Hui1, 2, ZHAO Guochao1, JIN Xin1(1. School of Mechanical Engineering, Liaoning Technical University, Fuxin 123000, China;2. School of Mechanical and Electronic Engineering, Harbin Institute of Technology, Harbin 150001, China)Abstract: In order to study the working characteristics and reliability of multiaxial vehicles' wheel-bridge, the actual working conditions of the four-axle vehicle were simulated and the wheel-bridge simulated loading test bench was established based on the secondary regulation technology. In view of the coupled interference problem between the driving speed and output torque of wheel-bridge test bench, the system transfer function was established, and the diagonal matrix between the transfer functions was solved. The diagonal matrix was used to decoupling the system and the coupled interference experiment and decoupling control experiment were carried out by the wheel-bridge test bench. The results show that the decoupling control of the test bench by the diagonal matrix can effectively solve the coupled interference problem between the driving speed and the output torque. In this test, the drive speed error is reduced by 78%, the secondary output torque error is reduced by 67% and the wheel side output torque is reduced by 29%. The test bench has better controllability by using diagonal matrix decoupling control, and it can meet the demand of vehicle wheel-bridge dynamic simulation loading experiment. The results can provide a certain experimental basis for the design of this kind of wheel bridge test bench and the simulated loading experiment.Key words: multiaxial vehicle; drive axle; test bench; decoupling control; simulated loading收稿日期:2018−06−19;修回日期:2018−08−01基金项目(Foundation item):国家自然科学基金资助项目(51405213) (Project(51405213) supported by the National Natural Science Foundation of China) 通信作者:王慧,博士,教授,从事二次调节技术研究;E-mail:*******************第4期王慧,等:多轴车辆轮桥加载试验台的解耦控制实验研究855随着对车辆安全可靠性和运行性能要求的不断提高,车辆关键部件的模拟加载试验研究越来越受到重视[1–2]。
低阶鲁棒解耦控制器设计的报告,800字
本文旨在介绍一种低阶鲁棒解耦控制器的设计方案。
该控制器使用低阶鲁棒技术、解耦技术以及其它控制技术,为系统提供更可靠的控制性能。
首先,我们需要弄清楚什么是低阶鲁棒控制。
低阶鲁棒控制是一种特定的控制方法,其中系统能够适应预期的抗扰动性能。
它的具体原理是:使用一种可以准确估计系统输出响应的模型来分析系统,然后根据其结果来设计控制系统,从而使系统具备一定的抗扰动性能。
接下来,我们来讨论低阶鲁棒解耦控制器的设计方案。
解耦控制器的基本原理是,通过分析控制的延迟以及控制系统内部状态,构建出一种可以降低或者消除抗扰动性能影响的特定闭环控制技术,进而实现更好的控制效果。
低阶鲁棒解耦控制器设计的具体步骤如下:首先,分析系统的特性,构建一个拥有某些特定系统参数的状态空间模型,然后采用低阶鲁棒控制算法来分析系统的动态行为。
之后,实施低阶鲁棒解耦控制算法,设计出一种可以有效抑制系统的抗扰动性的闭环控制策略,最后实现该设计。
总之,低阶鲁棒解耦控制器是一种有效的控制器设计方案,它综合使用低阶鲁棒技术以及解耦技术,在设计控制器时能够有效地降低传感器和执行器之间的耦合,使系统保持高可靠性。
控制力矩陀螺MIMO解耦控制实验钱玉恒;王佳伟;杨亚非【摘要】在卫星、空间站等航天器中经常用控制力矩陀螺执行姿态控制,而控制力矩陀螺的强耦合性严重地影响了姿态控制效果,研究这种多输入多输出(MIMO)被控对象的解耦控制十分必要.针对Model 750控制力矩陀螺装置,分析动力学模型的耦合特征,探究多框架反作用力矩和陀螺力矩的相互作用,设计出适宜的解耦控制方法.耦合控制实验表明,在零平衡点处各变量间互扰耦合微弱,在非零平衡点处各变量耦合明显.其中,反作用力矩和陀螺力矩激励的双轴控制方法解耦效果较差,仅适合耦合微弱的状况.线性二次型调节器(LQR)最优控制方法的解耦实验取得了良好的控制性能指标,解耦效果显著.【期刊名称】《实验室研究与探索》【年(卷),期】2018(037)007【总页数】6页(P36-40,44)【关键词】力矩陀螺;耦合;双轴控制实验;解耦控制【作者】钱玉恒;王佳伟;杨亚非【作者单位】哈尔滨工业大学飞行器控制实验教学中心,哈尔滨150001;哈尔滨工业大学飞行器控制实验教学中心,哈尔滨150001;哈尔滨工业大学飞行器控制实验教学中心,哈尔滨150001【正文语种】中文【中图分类】TP2710 引言随着航天科技高速发展,航天器种类愈加繁多,用途愈加广泛,精度与稳定性要求越来越高,要达到航天器高精度要求,姿态稳定性控制是基础。
航天器的姿态控制一般采用控制力矩陀螺(Control Moment Gyroscope,CMG)作为执行器[1-4],如国际空间站应用的单框架力矩陀螺或双框架力矩陀螺,需要配置力矩陀螺构型,使多个陀螺可协同动作,进而实现姿态控制作用。
目前有近400个航天器采用CMG作为姿态控制系统的主要执行器,我国天宫一号和二号已使用CMG作为飞船执行机构[5-6],与此同时,针对CMG的有关研究成果越来越多[7-10]。
美国ECP公司生产的Model 750型CMG是一种能够全面验证力矩陀螺特性的实验装置,已应用到众多世界知名大学,促进了对力矩陀螺的研究和教学。
实验二、 系统解耦控制一、实验目的1、 掌握解耦控制的基本原理和实现方法。
2、 学习利用模拟电路实现解耦控制及实验分析。
二、实验仪器1、 TDN —AC/ACS 型自动控制系统实验箱一台2、 示波器3、 万用表三、实验原理与内容一般多输入多输出系统的矩阵不是对角阵,每一个输入量将影响所有输出量,而每一个输出量同样受到所有输入量的影响,这种系统称为耦合系统。
系统中引入适当的校正环节使传递矩阵对角化,实现某一输出量仅受某一输入量的控制,这种控制方式为解耦控制,其相应的系统称为解耦系统。
解耦系统输入量与输出量的维数必相同,传递矩阵为对角阵且非奇异。
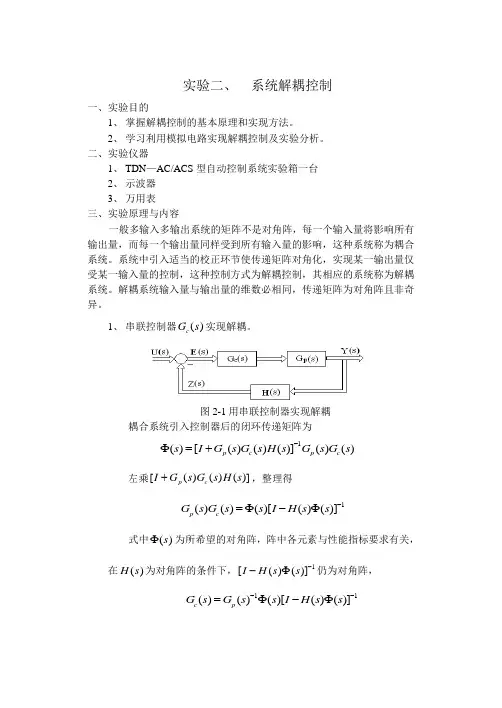
1、 串联控制器()c G s 实现解耦。
图2-1用串联控制器实现解耦耦合系统引入控制器后的闭环传递矩阵为1()[()()()]()()p c p c s I G s G s H s G s G s -Φ=+左乘[()()()]p c I G s G s H s +,整理得1()()()[()()]p c G s G s s I H s s -=Φ-Φ式中()s Φ为所希望的对角阵,阵中各元素与性能指标要求有关,在()H s 为对角阵的条件下,1[()()]I H s s --Φ仍为对角阵, 11()()()[()()]c p G s G s s I H s s --=Φ-Φ设计串联控制器()c G s 可使系统解耦。
2、 用前馈补偿器实现解耦。
解耦系统如图2-2,图2-2 用前馈控制器实现解耦解耦控制器的作用是对输入进行适当变换实现解耦。
解耦系统的闭环传递函数1()[()]()()p p d s I G s G s G s -Φ=+式中()s Φ为所希望的闭环对角阵,经变换得前馈控制器传递矩阵1()()[()]()d p p G s G s I G s s -=+Φ3、 实验题目双输入双输出单位反馈耦合系统结构图如图。
图2-3 系统结构图设计解耦控制器对原系统进行解耦,使系统的闭环传递矩阵为10(1)()10(51)s s s ⎡⎤⎢⎥+⎢⎥Φ=⎢⎥⎢⎥+⎣⎦通过原系统输出量(1,2y y )与偏差量(1,2e e )之间的关系112210()()21()()111Y s E s s Y s E s s ⎡⎤⎢⎥⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥+⎣⎦得到原系统开环传递矩阵 ()p G s1021()111p s G s s ⎡⎤⎢⎥+=⎢⎥⎢⎥⎢⎥+⎣⎦由输出量(1,2y y )输入量(1,2u u )个分量之间的关系为112210()()2(1)()()2112(2)2Y s U s s Y s U s s s s ⎡⎤⎢⎥+⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥+⎢⎥⎣⎦⎣⎦⎢⎥++⎣⎦ 原系统闭环传递矩阵'102(1)()2112(2)2s s s s s ⎡⎤⎢⎥+⎢⎥Φ=+⎢⎥⎢⎥++⎣⎦1)设计的串联控制器为:由于()H s I = 11()()()[()]c p G s G s s I s --=Φ-Φ1111000(1)(1)211151001(51)(51)s s s s s s s s --⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+++⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+++⎣⎦⎣⎦⎣⎦210(21)(1)15s s s s s s s +⎡⎤⎢⎥=⎢⎥+++⎢⎥-⎢⎥⎣⎦反馈控制器实现系统解耦的结构图图2-4用串联控制器实现解耦的系统结构图2)设计的前馈控制器为:'11()()[()]()()()d p p G s G s I G s s S s --=+Φ=ΦΦ 带入参数得:202(21)51s s s ⎡⎤⎢⎥+⎢⎥-+⎢⎥+⎣⎦前馈控制器实现系统解耦的结构图图2-5用前馈控制器实现解耦的系统结构图四、实验步骤1、 根据实验题目采用串联控制器或前馈控制器,在实验板上设计解耦系统的模拟实验线路并搭接实验电路。
解耦控制实验报告
实验目的:探究解耦控制在自动控制中的应用,并通过实验验证解耦
控制的有效性。
实验原理:
解耦控制是指将系统的输入与输出之间的耦合关系消除,使得系统能
够更加稳定地工作。
所谓输入与输出之间的耦合关系,即指系统在输入信
号作用下,输出信号会受到输入信号的一些干扰或影响。
解耦控制通过分
别对系统的输入和输出进行调节,达到解耦的效果。
在实际应用中,解耦控制可以提高系统的稳定性、可控性和响应速度,减小系统对干扰的敏感性,并且可以避免系统产生不可预测的输出。
实验设备和材料:
1.电脑
2. MatLab软件
3.控制系统实验中常用的电路组件(如电阻、电容等)
实验步骤:
1. 在MatLab中搭建解耦控制系统的数学模型。
2.根据系统模型,设计合适的控制器。
3.将控制器与系统连接起来,进行实验。
4.分别对比解耦控制和未解耦控制的结果并进行分析。
实验结果与分析:
在实验中,我们选择了一个典型的控制系统模型进行解耦控制实验。
实验结果显示,在解耦控制的情况下,系统的输出比未解耦控制的情况下更加稳定,且对干扰信号的响应更加迅速。
这说明解耦控制可以有效地降低系统的耦合性,提高系统的控制性能。
实验总结:
通过本次实验,我们深入了解了解耦控制在自动控制中的应用,并验证了解耦控制的有效性。
在实际应用中,解耦控制可以提高系统的稳定性和可控性,减小系统的不确定性和干扰影响,从而使系统能够更加稳定地工作。
因此,解耦控制在自动控制中具有广泛的应用前景。
河南科技Henan Science and Technology 计算机科学与人工智能总第816期第22期2023年11月酒精精馏塔解耦控制研究孟亚男王德平(吉林化工学院信息与控制工程学院,吉林吉林132022)摘要:【目的】分析酒精精馏塔的强耦合性及控制特点,提出一种解耦方式。
【方法】通过对相关文献进行分析,选择合适的控制方案,将酒精精馏塔的多输入多输出控制系统拆分为多个单输入单输出控制系统,再通过搭建好的模糊控制器来完成解耦控制。
与传统的PID控制方法相比,该方法具有相当的优势。
【结果】在模糊解耦控制下,酒精精馏塔的模糊解耦控制反应更快,超调量控制效果良好。
【结论】我国酒精精馏塔控制系统较为落后,采用先进的解耦方式能很好地解决生产过程中出现的超调量过大、反应过慢等问题。
关键词:酒精精馏塔;PID控制;模糊解耦;MATLAB中图分类号:TP273文献标志码:A文章编号:1003-5168(2023)22-0037-05 DOI:10.19968/ki.hnkj.1003-5168.2023.22.007Research on Decoupling Control of Alcohol Distillation ColumnMENG Yanan WANG Deping(School of Information and Control Engineering,Jilin University of Chemical Engineering,Jilin132022,China)Abstract:[Purposes]The strong coupling and control characteristics of alcohol distillation column were analyzed,to propose a decoupling method.[Methods]Through the analysis of relevant literature,the ap⁃propriate control scheme was selected.The multi-input multi-output control system of alcohol distilla⁃tion column was divided into multiple single-input single-output control systems,and then the decou⁃pling control was completed by a built-in fuzzy pared with the traditional PID control method,this method has considerable advantages.[Findings]Under the fuzzy decoupling control,the fuzzy decoupling control reaction of the alcohol distillation column is faster,and the overshoot control ef⁃fect is good.[Conclusions]As the control system of alcohol distillation column in China is relatively backward,we should adopt the advanced decoupling method can solve the problems of excessive over⁃shoot and slow reaction in the production process.Keywords:alcohol distillation column;PID control;fuzzy decoupling;MATLAB0引言酒精精馏塔常用的是多输入多输出控制系统,该系统控制方式复杂,且具有强耦合性、时变性等特点。
综合性设计型实验报告(2)拟定解耦调节器根据解耦数学公式求解对角矩阵, 即()()()()()()()()()()()()()()()()⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G P P P P P P P P P P P P P P P P 22112111221222112112221122211211122222128.752.8 3.313.6530.151216.282.8 5.882544055128.752.8 3.3S S S S S S S S S S ⎡⎤++---=⎢⎥++++++⎣⎦采用对角矩阵解耦后, 系统的结构如下图所示:解耦前后对象的simulink 阶跃仿真框图及结果如下: 1)不存在耦合时的仿真框图和结果图a不存在耦合时的仿真框图(上)和结果(下)2)对象耦合Simulink仿真框图和结果图b 系统耦合Simulink仿真框图(上)和结果(下)对比图a和图b可知, 本系统的耦合影响重要体现在幅值变化和响应速度上, 但影响不显著。
其实不进行解耦通过闭环控制仍有也许获得规定品质。
3)对角矩阵解耦后的仿真框图和结果图c对角矩阵解耦后的仿真框图(上)和结果(下)对比图a和图c可知, 采用对角解耦器后系统的响应和不存在耦合结果同样, 采用对角实现了系统解耦。
解耦后系统可按两个独立的系统进行分析和控制。
(3)控制器形式选择与参数整定通过解耦, 原系统已可当作两个独立的单输入输出系统。
考虑到PID应用的广泛性和系统无静差规定, 控制器形式采用PI形式。
PI参数整定通过解耦的两个单输入输出系统进行, 整定采用试误法进行。
当x1y1通道Kp=20, Ki=3时系统的阶跃响应如图:当x2y2通道Kp=35, Ki=5时系统阶跃响应如图:(4)系统仿真采用对角矩阵解耦时, 控制系统如下图所示:为了比较解耦和不解耦两种情况, 分别列出两种情况的Simulink框图和仿真结果。
关于解耦控制的研究和发展现状言1 引和Boksenhom多变量系统设计思想在控制学科发展初期就已经形成,在的报告和钱学森的著作中就已得到了基本研究;在现代控制理论的框架内Hood年正式提出。
随着被控系统越来越复杂,被控对象1964这个问题由Morgan在存在着更多难以控制的因素,如不确定性、多干扰性、非线性、滞后和非最小相位特性等,使得工程对耦合控制系统的设计要求越来越高,设计难度越来越大。
所以一直以来理论与工程界将其作为一个解耦问题成为学术与工程上一大难题,热点问题。
2 工程背景在现代化的工业生产中,不断出现一些较复杂的设备或装置,这些设备或装置的本身所要求的被控制参数往往较多,因此,必须设置多个控制回路对该种设备进行控制。
由于控制回路的增加,往往会在它们之间造成相互影响的耦合作用,也即系统中每一个控制回路的输入信号对所有回路的输出都会有影响,而每一个回路的输出又会受到所有输入的作用。
要想一由于耦合关”系统。
个输入只去控制一个输出几乎不可能,这就构成了“耦合系,往往使系统难于控制、性能很差。
解耦控制系统3如上图所示,所谓解耦控制系统,就是采用某种结构,寻找合适的控制规律来消除系统种各控制回路之间的相互耦合关系,使每一个输入只控制相应的一个输出,每一个输出又只受到一个控制的作用。
解耦控制是一个既古老又极富生命力的话题,不确定性是工程实际中普遍存在的棘手现象。
解耦控制是多变量系统控制的有效手段。
3.1 解耦控制系统的特点1. 解耦控制系统一般都是多输入多输出系统,而且输入和输出之间的关系是复杂的耦合,一个输入量影响多个输出量,一个输出量受多个输入量的影响。
实际被控对象不同,输入、输出之间的关系也不同。
被控对象的某个输2.出和某个输出具有明显的“一一对应”的“依赖”性,而其他输出和输出的相互关系则很弱,可以忽略。
此时的多输入多输出关系,可以简化为多个单输入单输出的单回路控制系统,而把其他的影响因素看成干扰。
实验八解耦控制实验一、实验目的1.掌握解耦控制的基本原理和实现方法。
2.学习利用模拟实验分析研究解耦控制的基本方法。
二、实验仪器1.EL-AT-II型自动控制系统实验箱一台2.计算机一台三、实验内容1.解藕前原系统结构图如图8-1所示,其被控对象为互相耦合的双输入双输出系统,U1(t)和U2(t)为控制量,Y1(t)和Y2(t)为输出量。
图8-1 原系统结构图2.解藕前原系统的模拟电路和结构图如图8-2和图8-3。
图8-2 原系统模拟电路图图8-3 原系统结构图3.开环解耦控制方框图如图8-4。
图8-4 开环解耦控制方框图虚线框内系统由计算机软件编程实现。
4.闭环解耦PID方框图如图8-5,这个图是在开环解耦的基础上,构成反馈控制系统。
图8-5 闭环解耦PID方框图虚线框内系统由计算机软件编程实现。
经PID校正之后,可形成二独立的闭环系统,PID参数的选择与单回路系统的选择方法相同。
为了检验系统是否解耦,取DA1和DA2的阶跃输入信号都为1V。
若将此二信号加入图8-1耦合系统,将会发现Y1(t)和Y2(t)的输出信号都为2V;若将此二信号加入图16开环解耦系统,会看到Y1(t)和Y2(t)的输出信号分别为1V和2V,但过渡过程还不算快;若将此二信号加入图17的PID解耦控制系统时,有反馈作用和PID作用,合理的选择PID 参数,将会看到Y1(t)和Y(t)基本是1V和2V信号。
四、实验步骤1.连接被测量典型环节的模拟电路(图8-1)。
电路的输入U1接A/D、D/A卡的DA1输出,输出Y1接A/D、D/A卡的AD1输入。
输入U2接A/D、D/A卡的DA2输出, 输出Y2接A/D、D/A卡的AD2输入。
检查无误后接通电源。
2.启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
3.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
开环实验4.选中 [实验课题→解耦控制→开环实验] 菜单项,鼠标单击将弹出参数设置窗口。
工业生产解耦控制方法分析汇报人:2023-12-20•引言•工业生产解耦控制方法概述•工业生产解耦控制方法应用案例目录•工业生产解耦控制方法改进与优化•工业生产解耦控制方法实施效果评估与展望01引言随着工业生产的不断发展,对生产过程的控制要求越来越高。
解耦控制方法作为一种有效的控制策略,能够提高工业生产过程的稳定性和效率,降低能耗和污染,具有重要的应用价值。
工业生产解耦控制方法的意义在工业生产过程中,各个工艺环节之间往往存在耦合关系,导致控制难度增加。
为了解决这一问题,研究者们提出了各种解耦控制方法,通过对工艺环节的解耦处理,实现对生产过程的精确控制。
工业生产解耦控制方法的背景背景与意义国内外研究现状国内研究现状近年来,国内研究者们在解耦控制方法方面取得了重要进展。
例如,一些研究者提出了基于模型预测控制的解耦控制方法,通过建立数学模型对生产过程进行预测和控制。
此外,还有一些研究者将人工智能技术应用于解耦控制方法中,提高了控制精度和效率。
国外研究现状在国外,研究者们也对解耦控制方法进行了广泛的研究。
例如,一些研究者提出了基于自适应控制的解耦控制方法,通过对工艺环节的在线调整实现解耦。
此外,还有一些研究者将鲁棒控制理论应用于解耦控制方法中,提高了系统的抗干扰能力。
02工业生产解耦控制方法概述解耦控制概念及原理解耦控制是一种通过消除或减小系统各部分之间的耦合关系,使系统各部分之间的作用相互独立,从而提高系统控制性能的方法。
解耦控制原理通过设计合理的控制器,使得系统各部分之间的耦合关系得到消除或减小,从而使系统各部分之间的作用相互独立,达到提高系统控制性能的目的。
通过设计合理的PID控制器,使得系统各部分之间的耦合关系得到消除或减小,从而实现解耦控制。
PID解耦控制通过设计状态反馈控制器,使得系统各部分之间的耦合关系得到消除或减小,从而实现解耦控制。
状态反馈解耦控制通过设计输出反馈控制器,使得系统各部分之间的耦合关系得到消除或减小,从而实现解耦控制。
解耦控制实验背景描述1、实验过程描述流股Cold和Hot进入储气罐,通过控制两路流股的流量来控制储气罐的压力和温度,具体的流程见附录。
1、控制变量储气罐的压力控制,设定压力为:400kpa;储气罐的温度控制,设定温度为:70degc。
2、操作变量流股Cold的流量;流股Hot的流量。
3、解耦目标解耦的目标是通过前馈补偿来减少被控变量之间的耦合关系。
4、控制方案本实验对象是一个典型的2*2解耦对象,那么设计到解耦配对的选择问题,可能的方案有两种,如下:方案一:通过流股Cold来控制储气罐的温度;通过流股Hot来控制储气罐的压力。
方案二:通过流股Cold来控制储气罐的压力;通过流股Hot来控制储气罐的温度。
实验目的1、根据仿真模型,了解双输入输出系统及其变量之间的相互耦合与影响;2、掌握解耦控制的基本原理与解耦控制其的设计方法。
实验内容1、根据流程模拟模型,辨识系统的过程模型对象的相对增益;2、根据相对增益阵来分析系统中变量匹配和调整参数设定;3、采用前馈补偿法构成解耦控制方案,设计补偿器的数学模型,并在UniSimDesign仿真平台上实现。
实验步骤1、辨识系统模型。
1) 载入仿真文件,设定初始输入输出,建立系统初稳态。
初始值如下:Cold输入: 34.204kg/h(50%)Hot输入: 95.018kg/h(50%)温度:772.60℃压力: 423.8kPa2) 求输出相对于Cold输入的传递函数:将FIC-100的输入增加10%,阶跃至40.460kg/h(60%),得到响应曲线如下图。
稳态下,温度为68.3℃,压力为389.2kPa。
根据两点法求一阶惯性系统模型公式,求得K=-0.642℃·h/kg,T=22.050min所以同样的方法求压力相对于流股Cold的传递函数,得K=0.774Pa·h/kg,T=12.834min所以3) 求输出相对Hot输入的传递函数将FIC-100的输入重新置为50%,稳定后将FIC-101的输入提升10%,阶跃至105.37kg/h(60%),得到响应曲线如下图。
耦合结构分析实验报告1. 引言耦合结构分析是现代工程设计中常用的一种分析方法,用于研究多个系统或组件之间的相互作用关系。
通过耦合结构分析,可以评估系统的稳定性、可靠性和性能等指标,从而为设计过程提供参考和优化方案。
在本次实验中,我们通过搭建一个简单的耦合系统,对其进行结构分析。
本报告将详细介绍实验的目的、方法、结果和讨论,以及实验过程中的注意事项和结论。
2. 实验目的本实验的主要目的是通过搭建一个耦合系统,学习和掌握耦合结构分析的基本方法和步骤,包括系统建模、振动模态分析和模态超级位置分析。
具体而言,实验的主要目标包括:- 掌握耦合系统的建模方法和技巧;- 学习使用有限元软件进行耦合系统的振动模态分析;- 学习并应用模态超级位置分析方法,评估系统的结构稳定性。
3. 实验方法3.1 系统建模首先,我们通过观察和理解系统的结构和工作原理,对耦合系统进行建模。
根据系统的实际情况,可以使用传统的连续体模型或离散模型进行建模。
在本实验中,我们选择了离散模型来描述系统。
3.2 振动模态分析使用有限元分析软件,对耦合系统进行振动模态分析。
在分析过程中,我们需要设置适当的边界条件和加载条件,以准确计算出系统的自由振动频率和模态形态。
3.3 模态超级位置分析根据振动模态分析得到的结果,我们可以进行模态超级位置分析。
该分析方法用于评估系统中各个模态的贡献程度,确定系统中关键模态的位置和影响。
4. 实验结果与讨论通过对耦合系统的振动模态分析和模态超级位置分析,我们得到了一系列有关系统结构和性能的数据。
4.1 振动模态分析结果根据振动模态分析的结果,我们得到了系统的自由振动频率和相应的模态形态。
通过比较各个模态的自由振动频率,我们可以得出一些结论,如哪些频率较高,对系统更为重要等。
4.2 模态超级位置分析结果模态超级位置分析结果揭示了系统中关键模态的位置和影响程度。
通过分析超级位置分布,我们可以识别出对系统结构稳定性和性能影响较大的模态,并据此进行优化设计。
解耦控制实验
背景描述
1、实验过程描述
流股Cold和Hot进入储气罐,通过控制两路流股的流量来控制储气罐的压力和温度,具体的流程见附录。
1、控制变量
储气罐的压力控制,设定压力为:400kpa;
储气罐的温度控制,设定温度为:70degc。
2、操作变量
流股Cold的流量;
流股Hot的流量。
3、解耦目标
解耦的目标是通过前馈补偿来减少被控变量之间的耦合关系。
4、控制方案
本实验对象是一个典型的2*2解耦对象,那么设计到解耦配对的选择问题,可能的方案有两种,如下:
方案一:
通过流股Cold来控制储气罐的温度;
通过流股Hot来控制储气罐的压力。
方案二:
通过流股Cold来控制储气罐的压力;
通过流股Hot来控制储气罐的温度。
实验目的
1、根据仿真模型,了解双输入输出系统及其变量之间的相互耦合与影响;
2、掌握解耦控制的基本原理与解耦控制其的设计方法。
实验内容
1、根据流程模拟模型,辨识系统的过程模型对象的相对增益;
2、根据相对增益阵来分析系统中变量匹配和调整参数设定;
3、采用前馈补偿法构成解耦控制方案,设计补偿器的数学模型,并在UniSimDesign仿真平
台上实现。
实验步骤
1、辨识系统模型。
1)载入仿真文件,设定初始输入输出,建立系统初稳态。
初始值如下:
Cold输入:34.204kg/h(50%)
Hot输入:95.018kg/h(50%)
温度:772.60℃
压力:423.8kPa
2)求输出相对于Cold输入的传递函数:
将FIC-100的输入增加10%,阶跃至40.460kg/h(60%),得到响应曲线如下图。
稳态下,温度为68.3℃,压力为389.2kPa。
根据两点法求一阶惯性系统模型公式,求得K=-0.642℃·h/kg,T=22.050min
所以
G11(s)=
−0.642 22.050s+1
同样的方法求压力相对于流股Cold的传递函数,得K=0.774Pa·h/kg,T=12.834min 所以
G21(s)=
0.774 12.834s+1
3)求输出相对Hot输入的传递函数
将FIC-100的输入重新置为50%,稳定后将FIC-101的输入提升10%,阶跃至105.37kg/h(60%),得到响应曲线如下图。
稳态下,温度为73.1℃,压力为416.8kPa。
用上述方法求传递函数:
G12(s)=
0.321 26.142s+1
G22(s)=
1.093 6.192s+1
2、设计补偿器的数学模型,并在UniSimDesign仿真平台上实现。
1)计算解耦控制补偿传递函数。
解耦原理如下:
所以
D21=−K21g21
K22g22
=
1.206(2
2.05s+1)
12.85s+1
D12=−K12g21
K11g11
=
0.294(6.19s+1)
26.14s+1
2)对解耦效果进行仿真分析。
将解耦控制补偿传递函数计算结果输入UniSimDesign中。
先将Cold的输入值阶跃上升,流股Hot的输入值不变,输出如下图所示:
可见,储气罐的压强几乎没有变化,而储气罐的温度有了上升。
再给Hot的输入值阶跃上升,流股Cold的输入值不变,输出如下图所示:
可以看出,储气罐的温度几乎没有变化,而储气罐的压强上升。
从而验证了解耦效果较为明显。
收获心得
通过这次实验,我深入的了解了双输入输出系统及其变量之间的相互耦合与影响,掌握了解耦控制的基本原理与解耦控制其的设计方法。
由于对软件不是很熟悉,实验过程中出现了很多问题,感谢助教的悉心指导。