法拉克系统学习笔记
- 格式:doc
- 大小:105.50 KB
- 文档页数:11
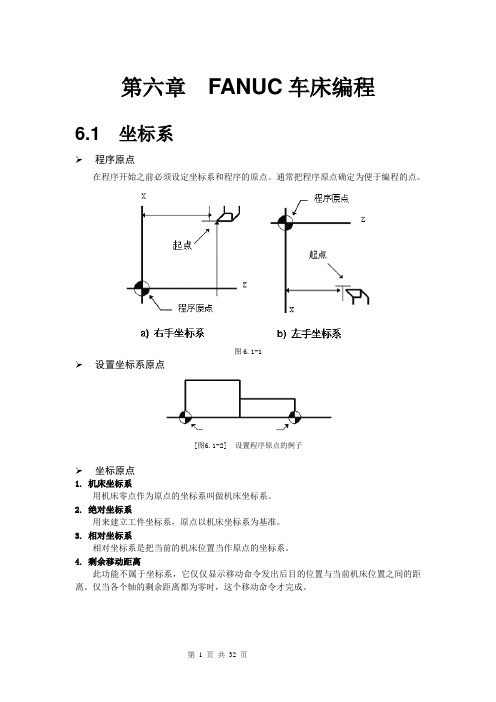
第六章FANUC车床编程6.1坐标系程序原点在程序开始之前必须设定坐标系和程序的原点。
通常把程序原点确定为便于编程的点。
图6.1-1设置坐标系原点[图6.1-2] 设置程序原点的例子坐标原点1. 机床坐标系用机床零点作为原点的坐标系叫做机床坐标系。
2. 绝对坐标系用来建立工件坐标系,原点以机床坐标系为基准。
3. 相对坐标系相对坐标系是把当前的机床位置当作原点的坐标系。
4. 剩余移动距离此功能不属于坐标系,它仅仅显示移动命令发出后目的位置与当前机床位置之间的距离。
仅当各个轴的剩余距离都为零时,这个移动命令才完成。
图6.1-3设置工件坐标系编辑程序首先要确定坐标系,程序原点与刀具起点之间的关系构成工件坐标系;用G50 指令来建立。
图6.1-4绝对/相对坐标系编程数控车床有两个控制轴,有两种编程方法:绝对坐标命令方法和相对坐标命令方法。
此外,这些方法能够被结合在一个指令里。
对于X 轴和Z 轴地址所要求的相对坐标指令是U 和W。
图6.1-5 ①绝对坐标程序---X40.Z5.;②相对坐标程序---U20.W-40.;③混合坐标程序---X40.W-40.;6.2G代码命令6.2.1G代码组及含义[表 6.2-1] G 代码组及解释( 带 * 者表示是开机时会初始化的代码。
)6.2.2G代码解释G00定位(G00)1. 格式这个指令把刀具从当前位置移动到指令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
图6.2-12. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在指令指定的位置。
3. 直线定位刀具路径类似直线切削(G01)那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G00 X-100 Z-65G01直线插补(G01)1. 格式直线插补以直线方式和指令给定的移动速率,从当前位置移动到指令位置。

法兰克数控编程口诀(原创版)目录一、法兰克数控编程基础知识1.数控编程指令概述2.常用 G 代码功能字二、法兰克数控编程技巧1.外圆粗车循环指令2.精车循环指令3.孔加工循环指令4.坐标系建立与取消5.刀具补偿与刀具切换三、法兰克数控编程实例1.外圆粗车循环实例2.精车循环实例3.孔加工循环实例正文一、法兰克数控编程基础知识1.数控编程指令概述数控编程指令是用于控制数控机床执行特定操作的命令,通常由字母和数字组成。
法兰克数控系统中常用的编程指令包括 G 代码和 M 代码。
G 代码主要用于控制机床的运动和加工过程,而 M 代码则主要用于控制机床的辅助功能,如刀具选择、刀具补偿和主轴转速等。
2.常用 G 代码功能字G 代码功能字是 G 代码指令中字母和数字的组合,用于表示特定的操作。
以下是一些常用的 G 代码功能字:- G00:快速移动点定位- G01:直线插补- G02:顺时针圆弧插补- G03:逆时针圆弧插补- G71:外圆粗切循环- G70:精加工循环指令- G41:镗孔精加工- G42:外圆精加工- G40:取消刀补指令二、法兰克数控编程技巧1.外圆粗车循环指令外圆粗车循环指令是法兰克数控编程中常用的一种指令,用于实现外圆的粗加工。
其指令格式为:G71UrRdX1Z1,其中 U 为每次进给量,r 为每次退刀量,d 为直径,X1 和 Z1 分别为初始位置的 X 和 Z 轴坐标。
2.精车循环指令精车循环指令用于实现外圆的精加工。
其指令格式为:G70UrRdX1Z1,其中 U 为每次进给量,r 为每次退刀量,d 为直径,X1 和 Z1 分别为初始位置的 X 和 Z 轴坐标。
3.孔加工循环指令孔加工循环指令用于实现孔的加工。
其指令格式为:G81X1Z1Rd,其中 X1 和 Z1 分别为孔的位置坐标,R 为孔半径,d 为孔深。
4.坐标系建立与取消在法兰克数控编程中,需要建立和取消坐标系以实现准确的加工。

发那科0i-mf 系统学习小结-1一.数据备份与恢复1.SRAM 与FROM :SRAMFROMCNC 参数可以备份输入输出,打包备份为SRAM_BAK.001文件CNC 系统软件系统区不可备份,可输入PMC 参数数字伺服软件螺距误差补偿量PMC 软件刀具补偿量其他CNC 控制软件工件坐标PMC 顺序程序用户区,可以输入输出程序目录IO 地址分配宏程序变量C 语言执行程序加工程序FANUC PICTURE1.1SRAM 备份方式一:BOOT 模式下备份和恢复①首先将参数20改为4,对接为CF 输入,关闭机床;按住显示屏最右边两个软键开机,进入BOOT 画面,如图示操作。
②在BOOT 画面中,通过“UP ”和“DOWN ”对应的软键将光标移动到7的按住最右边两个键开机BOOT 画面:7.为SRAM 数据的备份/恢复8.为格式化存储卡位置,按下“SELECT ”对应的软键选择,按下“yes ”进入SRAM DATA UTILITY 界面,如图示界面显示。
③选择1中的“SRAM BACKUP ”选项,按yes 确定,把机床里面的SRAM 数据备份到CF 卡中,为默认的SRAM_BAK.001文件;当选择2中的“SRAM RESTORE ”选项时,则把CF 卡中的SRAM 备份文件恢复到机床中。
方式二:在所有IO 中备份①同样把参数20改为4,CF 卡模式输入,按下“SYSTEM ”键,按下系统软键的翻页,找到“所有I/O ”界面,如图示界面。
②按下“所有I/O ”,出现了“程序”、“参数”、“刀偏”、“宏程序”等选项,我们可以在此界面备份或恢复这些选项,如备份恢复参数,选择“参数”选项,切换到1.为SRAM 备份2.为SRAM 恢复3.为自动备份与恢复4.为结束翻页键所有I/O“编辑”状态,点击“操作”、点击“输出”,设置名称,点击“执行”即可备份。
③同样如果需要把备份参数从CF 卡恢复参数到机床,在第二步中,选择“输入”选项,选择CF卡的备份参数,点击确定,输入即可恢复。

第一节:PMC基础知识1.顺序程序的概念所谓的顺序程序是指对机床及相关设备进行逻辑控制的程序。
在将程序转换成某种格式(机器语言)后,CPU即对其进行译码和运算处理,并将结果存储在RAM和ROM中。
CPU高速读出存储在存储器中的每条指令,通过算数运算来执行程序。
如下图所示:2.顺序程序和继电器电路的区别:上图所示:继电器回路(A)和(B)的动作相同。
接通A(按钮开关)后线圈B和C中有电流通过,C接通后B断开。
PMC程序A中,和继电器回路一样,A通后B、C接通,经过一个扫描周期后B 关断。
但在B中,A(按钮开关)接通后C接通,但B并不接通。
所以通过以上图例我们可以明白PMC顺序扫描顺序执行的原理。
3.PMC的程序结构对于FANUC的PMC来说,其程序结构如下:第一级程序—第二级程序—第三级程序(视PMC的种类不同而定)—子程序—结束如图:在PMC执行扫描过程中第一级程序每8ms执行一次,而第二级程序在向CNC的调试RAM中传送时,第二级程序根据程序的长短被自动分割成n等分,每8ms 中扫描完第一级程序后,再依次扫描第二级程序,所以整个PMC的执行周期是n*8ms。
因此如果第一级程序过长导致每8ms扫描的第二级程序过少的话,则相对于第二级PMC所分隔的数量n就多,整个扫描周期相应延长。
而子程序是位于第二级程序之后,其是否执行扫描受一二级程序的控制,所以对一些控制较复杂的PMC程序,建议用子程序来编写,以减少PMC的扫描周期。
输入输出信号的处理:一级程序对于信号的处理:如上图可以看出在CNC内部的输入和输出信号经过其内部的输入输出存储器每8MS由第一级程序所直接读取和输出。
而对于外部的输入输出经过PMC内部的机床侧输入输出存储器每2MS由第一级程序直接读取和输出。
二级程序对于信号的处理:而第二级程序所读取的内部和机床侧的信号还需要经过第二级程序同步输入信号存储器锁存,在第二级程序执行过程中其内部的输入信号是不变化的。

1、NC数字控制简称数控。
是用数字信号对机床的运动及其加工过程进行控制的一种方法。
2、NC machine 数控机床。
采用了数控技术的机床或是装配了数控系统的机床。
是一种装有程序的机床,该系统能逻辑的处理具有特定代码的或其它符号编码指令规定的程序。
3、数控系统。
它能自动阅读载体上事先给定的程序,并将其译码,从而使机床运动和加工零件。
4、数控加工。
就是在数控机床上进行零件加工的工艺过程。
5、数控机床产生于1952年3月的美国。
由美国帕森斯公司和麻省理工学院伺服机构研究所在美国空军后勤部的资助下,经过三年的共同研究,研制成功了世界上第一台三坐标数控铣床。
6、数控机床的控制系统经历了,电子管、晶体管、集成电路、计算机、微处理机控制、数字控制六代的演变。
7、数控机床的组成:机床本体、数控装置、伺服系统和其它装置组成。
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈数控机床的分类:1、按机床的运动控制方式可分为:点位控制、直线控制、轮廓控制。
2、按伺服系统的控制可分为:开环控制系统、闭环控制系统、半闭坏控制系统。
3、按工艺用途可分为:金属切削类、金属成型类、特种加工类、其它类。
4、按控制系统的联动坐标系可分为:两坐标联动、三坐标联动、二轴联动、多轴联动。
5、按数控装置可分为:硬件式、软件式。
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈刀具类型:1XY(铣刀)类型组100按CLDATA执行的铣刀110球形铣刀120端面铣刀(不带焊接)121端面铣刀(带焊接)130角度头铣刀(不带焊接)131角度头铣刀(带焊接)140平面铣刀145螺纹铣刀150侧面铣刀155锥形铣刀;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<2XY(钻头)200螺丝钻205整体钻头210镗杆220中心钻230埋头钻231平头钻240攻标准螺纹241攻细牙螺纹242攻惠氏螺纹250整孔钻<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<4XY磨削加工400表面磨削加工砂轮401带监控的表面磨加工砂轮403带监控的表面磨加工砂轮(不带刀具基本尺寸)适用于砂轮外缘速度GWPS410横旋转轮411带监控的横旋转轮413带监控的横旋转轮(不带适用于砂轮外缘速度GWPS的刀具基本尺寸)490修整器<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<5XY车削刀具500粗加工刀具510精加工刀具520加工槽用刀530截刀540螺纹加工刀具;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈1、三视图分为主视图、俯视图、侧视图。
FANUC机器人系统知识学习一外部轴参数设置1.6kw 3.0kw 4.0kw 备注motor type aif8 aif12 aif22 电机型号Amplifier current 40A 8OA 80A 放大电流motor RotationalSpeed3000 3000 3000 电机转速Ext type Integrated rail(直线)rotaryaxis(旋转)外部轴类型Ext_direetion 设定运动方向与大地坐标系方向相同外部轴运动方向Joint max speed 直线轴最大500mm/s 旋转轴最大20度/s单轴运行最大速度Gear Ratio 常用直线:16.964 旋转:803.7 根据系统不同而定。
减速比motor sign true /false (与直线轴联动有关系)电机自己旋转方向upper limit 根据系统情况而定正方向软限位lower limit 根据系统情况而定负方向软限位master postion 外部轴零点位置零点accel time 1 直线256/ 旋转384加速时间Accel time 2 直线128/旋转192加速时间minimum accel time 直线128/旋转384最小加速时间load ratio 5 5 5 负载系数axis amp number 机器人本体为1,外部轴放大排序有关。
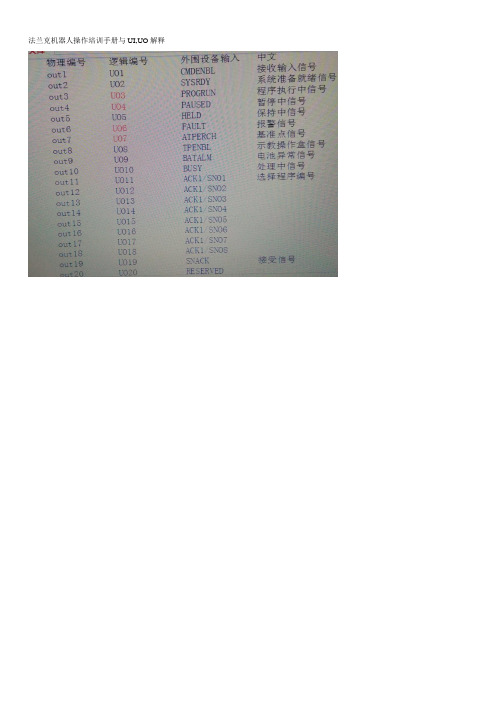
轴放大号axis amp type 2 2 2 轴放大类型brake number 与机器人本体的为1,单独模块为2刹车号offset x,y,z = 0mm 与旋转轴联动有关轴的位置关系servo off enable enable enable enable 伺服关断启用servo off time 3 sec 3 sec 3 sec伺服休止时间exp filer valid FALSE(旋转轴有关)有效文件二FANUC DeviceNet IO 配置说明1.系统要求a.FANUC Device Net接口板b.FANUC R-J3iC控制柜c.DeviceNet接口设备d.5芯Phoenix接口*2+专用电缆+120Ω电阻*2e.系统软件——DeviceNet Interface(J753)2.连线图以WAGO750-346 I/O模块为例,硬件连接如下:图1. DeviceNet连接由于FANUC按照I/O个数进行分配,所以W AGO数字量模块可以单块(750-402,750-504)的加入,无须凑齐8位的倍数加入。
FANUC系统编程操作要点本文档旨在提供FANUC系统编程操作的要点,帮助用户更好地使用该系统进行编程操作。
以下是一些重要的要点:1. 了解系统结构在开始编程之前,了解FANUC系统的基本结构非常重要。
了解系统的逻辑、组成部分以及其与其他组件的关系,将有助于您更好地理解编程操作的原理和流程。
2. 研究编程语言FANUC系统使用特定的编程语言进行编程操作,例如Karel或基于ISO标准的G代码。
研究并熟悉这些编程语言的语法和特性,对于正确地编写和调试程序至关重要。
同时,了解不同指令和函数的用法也是必要的。
3. 仔细阅读系统手册FANUC系统手册提供了系统的详细信息和操作说明。
在编程操作中,仔细阅读和理解系统手册中相关部分的内容非常重要。
手册中包含了关于编程操作的详细步骤、示例代码和常见问题的解答,是您研究和掌握FANUC系统编程的重要参考资料。
4. 注意安全操作使用FANUC系统进行编程操作时,确保遵守相关的安全操作规定。
在编写程序前,了解和遵守系统的安全标准和措施,以确保编程操作的安全性和可靠性。
此外,使用正确的防护设备和安全措施,以确保人员和设备的安全。
5. 注重测试和调试在编写复杂的程序时,注重测试和调试非常重要。
通过逐步测试和调试程序,可以及时发现和修复错误,确保程序的正确性和可靠性。
使用系统提供的调试工具和模拟器,可以有效提高测试和调试的效率和准确性。
通过遵循以上要点,您将能够更好地操作和编程FANUC系统。
请始终确保理解并遵守相关的编程操作规范和安全要求,以确保编程操作的顺利进行。
FANUC培训总结(程序员)各位领导好:经过一个星期的培训,通过理论和实操培训让我对FANUC机器人有了一定的了解,实操室是由16台机器人,型号有M-1Ia、LR Mate 200iC、R-2000Ib、M-900iA等组成,其中R-2000Ib、M-900iA机器人是我们公司使用的,我们车间FANUC用的焊接系统为Spot Tool,在培训期间和上汽、依多科公司设备的员工,进行交流、请教,这次培训我主要学习“非运动指令”,因为FANUC很多应用指令可以在非运动指令调用出来,以及备份和加载和KUKA大不一样。
在理论、实操考试中,我顺利拿到FANUC证一张,我在这一周内学到的知识如下。
一、机器人系统的组成:由机器人、控制柜、系统软件及周边设备组成。
二、坐标介绍:JOINT:J1、J2、J3、J4、J5、J6。
X Y Z:WORLD,JGFRM,USER(用户自定义前,该三种坐标位置与方向完全重合)TOOL:三、坐标系设置一、工具坐标系定义:直角坐标系定,定义TCP点的位置和姿态1、缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。
根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(tool centerpoint)。
2、工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储于系统变量$MNUTOOLNUM。
3、设置方法●三点法●六点法●直接输入法二、用户坐标系定义:程序中记录所有位置信息的参考坐标系,用户可定义该坐标系。
1、可于任何位置一任何方法设置的坐标系。
2、最多可以设置9个用户坐标系,它被存储于系统变量$MNUFRAME。
3、设置方法●三点法●四点法●直接输入法四、程序的管理一、创建程序二、选择程序三、删除程序四、复制程序五、查看程序属性六、运动类型七、非运动指令1、寄存器指令registers2、I/O指令I/O3、条件指令IF4、条件选择指令SELECT5、等待指令W AIT6、跳转/标签指令JMP/LBL7、调用指令CALL8、偏置条件指令OFFSET9、工具坐标系调用指令UTOOL_NUM10、用户坐标系调用指令UFRAME_NUM11、其他指令五、备份和加载1、文件的备份/加载设备R-J3iC控制器可以使用的备份/加载设备:1)Memory card (MC)2)USB3)PC2、文件类型文件事数据在机器人控制柜存储器内的存储单元。
1、铸铁的分类,HT表示灰铸铁,QT表示球墨铸铁,KT表示可锻
铸铁。
2、常用的螺纹分为,普通螺纹、英制螺纹、管螺纹、梯形螺纹、锯
齿形螺纹,其中普通螺纹又分为“粗牙普通螺纹”和“细牙普通螺纹”。
法拉克系统操作面板,英—汉对照说明:
型号:FANUC series 0i—MB
POS 当前点位的坐标显示(绝对、相对、综合)PORG 当前程序的显示、程序检视
OFFSET/SETTING 地址栏(刀具地址、工件坐标系的建立、
刀具补偿值的建立)
CUSTOM/GRATFH 加工描述键、加工模拟键
SYSTEM 参数键(机床参数、用户一般不用)PAGE↑上翻页键
PAGE↓下翻页键
MESSGE 报警信息键
SHIFT 大小写键
ALIFR 字符替换键
CAN 删除当前字符键
INSERT 写入键(编辑状态时使用的写入键)
INPT 写入键(写入坐标值、刀具补偿值)DELETE 删除键
HELP 帮助键
RESET 复位键
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈,JB/T3208—1983常用准备功能G代码
JB/T3208—1983常用辅助功能M代码
附加M代码:
1、刀具长度补偿:(G43、G44、G49、G40)用来补偿刀具长度的
一种功能,实际刀具长度与编程长度不一致时,可通过刀具长度补偿这一功能实现刀具长度误差的补偿。
能常把实际刀具长度与编程式刀具长度之差称为偏置量。
这个偏置量可通过偏置叶面设
置在存贮器中。
G43为正向补偿;G44为反向补偿;G49为取消刀具长度补偿;G40为取消刀具补偿,(包含刀具长度补偿和刀具半径补偿)。
2、刀具半径补偿:G41、刀具半径左补偿G42、刀具半径右补偿G40
取消刀具半径补偿。
刀具半径补偿也称刀具半径偏置。
刀具半径补偿不是指刀具在加工过程中刀具半径发生变化,而是指改变刀具中心的运动轨迹的功能。
区分G42或G42的方法是;沿着刀具移动的方向,刀具在工件的左边,为刀具半径左补偿;刀具在工件的右边,为刀具半径右补偿。
3、工件坐标系的偏置指令:G54……G59
4、基本移动指令:G00快速移动指令;G01直线插补指令;G02顺
时针方向圆弧插补指令;G03逆时针方向圆弧插补指令。
5、G02顺时针方向圆弧插补和G03逆时针方向圆弧插补的判断方
法:沿垂直于圆弧所在平面的坐标轴的负方向观察,来判定圆弧的顺逆方向。
I、J、K 或R (半径),I、J、K为圆心坐标相对于圆弧起点坐标的偏移量,I、是圆弧起点的X轴坐标值减去圆心的X轴坐标值;J、是圆弧起点的Y轴坐标值减去圆心的Y轴坐标值;K、是圆弧起点的Z轴坐标值减去圆心的Z轴坐标值。
R (半径),当圆弧的曲率半径小于180°时,R (半径)为正值;当圆弧的曲率半径大于180°时,R (半径)为负值。
R (半径)不能用于整圆的编程。
6、绝对值编程式:G90
7、相对值编程式:G91
8、暂停指令:G04。
格式:G04P—或G04X—。
其中P—为暂停时间为
秒;X—为暂停时间为毫秒。
该指令的作用是使刀具作短时间的无进给的运动。
9、程序停止:M00 该指令是使主轴、进给、冷却液自动停止,而模
态信息保持不变,当按下“起动键”后程序可继续执行。
10、选择性停止:M01 当按下M01选择性停止键后,程序停止执
行,当按下“起动键”后程序可继续执行。
11、程序结束:M02、M30 它两的区别是执行M30后,光标返回
到程序的开头。
12、主轴正转:M03
13、主轴反转:M04
14、主轴停止:M05
15、自动换刀:M06
16、冷却液开:M08
17、冷却液关:M09
18、子程序调用:M98 (格式:M98 P+子程序号)
19、子程序调用结束:M99
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈法拉克系统钻孔循环格式
注:
R:Z轴“回退高度”。
Q:每次钻进深度。
P:停留时间。
F:进给量。
法拉克系统中,在固定循环中,G98表示返回平面为初始平面,(机床默认G98,初始平现为所设定的R平面),G99表示返回平面为安全平面。
固定循环:选用固定循环时首先要选区择定位平面和钻孔轴,定位平面的选择取决于坐标平面的选择指令,G17、G18、G19。
G17平面,即X轴与Y轴组成的平面;G18平面,即X轴与Z轴组成的平面;G19平面,即Y轴与Z轴组成的平面。
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈
法拉克系统
美国嗒亭加工中心VB—1000 如果在换刀时出现报警,Z轴误差过大,恢复的方法是:
在MDI方式下:
第一组:
M76 (允许调整)
M71 (退回刀库) (退刀命令)
M77 (调整完毕)
第二组:
M76 (允许调整)
M73 (紧刀命令)
M77 (调整完毕)
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈
西门子系统中:
R n 算数参数
n算数参数号n==0~∞.缺省值n==0~99
使用算符/算数功能时,需要作用常规的数字符号,加工预先由括号设置,否则乘除将优先于加减,度用于三角函数。
例:
R1
R2
R3
.
.
R99
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈
法拉克系统手工编制有条件程序跳跃。
(循环分层铣削的格式)
假定工件要“铣”10mm深,每一刀“铣”1mm深
格式一、
#1=1 (下刀平面高度)
Z=-#1 (Z轴下刀深度)
#1=#1-1 (Z轴往复下刀深度)
IF [#1 GE-9] GOTO N100(程序号) (Z轴下刀总深度为10,〈10-1〉=9)
或
IF [#1>=-10] GOTO N100(程序号)
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈
法拉克系统调用子程序的操作示例:
如图,加工相同形状的槽,槽深10mm,Z轴开始点在工件的上方100mm处(采用主程序和调用子程序的编程方法)。
主程序:
Oxxxxxxxxx 主程序号
T1 M6;
G17G54G90G0Z100;
S500M3;
X0Y0;
M98 P100;(M98为子程序调用命令,P100为子调用子程序号为100)G90G0Z100;
X80Y0;
M98 P100;(M98为子程序调用命令,P100为子调用子程序号为100)G90Z100;
M5;
M30;
%
子程序:
O100 子程序号
G17
G54
G90G90Z10;
G91G01Z-20F300;(G91相对坐标系,走相对值坐标点)
G41D1X40Y20F100;(G41刀具半径左补偿,D1刀号为1号刀)Y30;
X-10;
X10Y30;
X40;
X10Y-30;
X-10;
Y-20;
X-50;
G90G0Z100;(Z轴退刀时取消相对值坐标系)
G40X0Y0;
M99;(M99调用子程序结束命令)
%
1、
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈法拉克系统调用子程序的操作格式:
M98 P100;(子程序调用命令M98,调用了程序号为100)M99 (子程序调用结束命令M99)
;〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈〈
11。