超声波倒车雷达 毕业答辩PPT
- 格式:ppt
- 大小:607.00 KB
- 文档页数:15


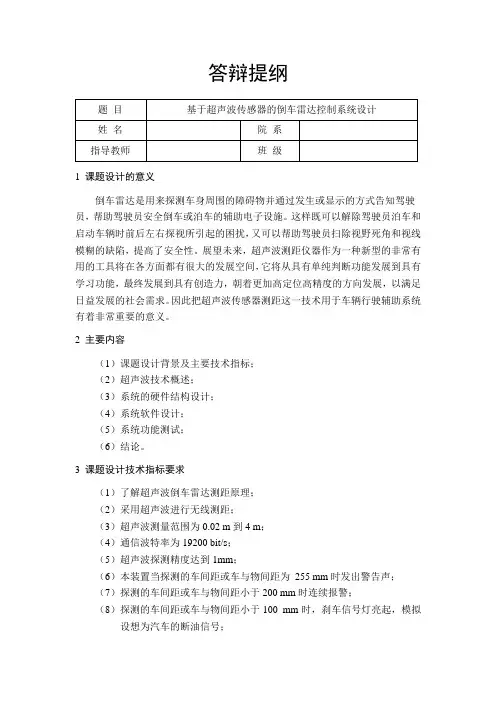
答辩提纲1 课题设计的意义倒车雷达是用来探测车身周围的障碍物并通过发生或显示的方式告知驾驶员,帮助驾驶员安全倒车或泊车的辅助电子设施。
这样既可以解除驾驶员泊车和启动车辆时前后左右探视所引起的困扰,又可以帮助驾驶员扫除视野死角和视线模糊的缺陷,提高了安全性。
展望未来,超声波测距仪器作为一种新型的非常有用的工具将在各方面都有很大的发展空间,它将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力,朝着更加高定位高精度的方向发展,以满足日益发展的社会需求。
因此把超声波传感器测距这一技术用于车辆行驶辅助系统有着非常重要的意义。
2 主要内容(1)课题设计背景及主要技术指标;(2)超声波技术概述;(3)系统的硬件结构设计;(4)系统软件设计;(5)系统功能测试;(6)结论。
3 课题设计技术指标要求(1)了解超声波倒车雷达测距原理;(2)采用超声波进行无线测距;(3)超声波测量范围为0.02 m到4 m;(4)通信波特率为19200 bit/s;(5)超声波探测精度达到1mm;(6)本装置当探测的车间距或车与物间距为255 mm时发出警告声;(7)探测的车间距或车与物间距小于200 mm时连续报警;(8)探测的车间距或车与物间距小于100 mm时,刹车信号灯亮起,模拟设想为汽车的断油信号;(9)系统电源为直流5V 。
4 整体设计思路本设计的超声波传感器倒车雷达控制系统分为硬件电路和控制软件两大部分。
硬件电路由ATmega8单片机处理模块、US100超声波测距模块、液晶显示、报警电路及稳压电源模块五个部分组成。
软件部分采用模块化设计,单片机直接和US100超声波模块进行串口通信,发送特定指令,获取当前的距离值。
整体系统设计框图如下图1-1所示。
模块(US 100)超声波发射超声波接收UART 通信单片机12864液晶(点阵)显示屏报警电路执行机构电 源图1-1 整体系统框图5 总结本设计介绍了一种基于单片机的超声波倒车雷达测距系统,明确介绍了系统的总体设计方案、技术指标、软硬件的结合设计以及元器件的选型。
