异常报警一览表
- 格式:pdf
- 大小:230.02 KB
- 文档页数:15
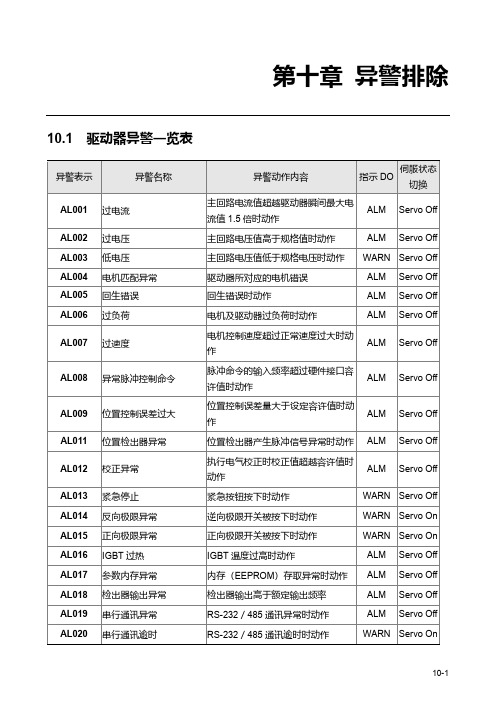
第十章异警排除10.1 驱动器异警一览表第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列10.2 CANopen通讯异警一览表第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列10.3 运动控制异警一览表第十章异警排除 ASDA-A2系列第十章异警排除 ASDA-A2系列注:若出现与以上驱动器异警一览表、CANopen通讯讯异警一览表和运动控制异警一览表内不同的异警信息时,请与当地经销商或技术人员联系。
第十章异警排除 ASDA-A2系列10.4 异警原因与处置异警表示AL001:过电流AL002:过电压AL003:低电压AL004:电机匹配错误AL005:回生错误AL006:过负荷AL007:过速度AL008:异常脉冲控制命令AL009:位置控制误差过大AL011:位置检出器异常AL012:校正异常AL013:紧急停止AL014:反向运转极限异常AL015:正向运转极限异常AL016:IGBT过热AL017:内存异常AL018:检出器输出异常AL019:串行通讯异常AL020:串行通讯逾时AL022:主回路电源异常AL023:预先过负载警告AL024:编码器初始磁场错误AL026:编码器内部数据可靠度错误AL027:编码器内部重置错误AL028:编码器高电压错误或编码器内部错误AL029:格雷码错误AL030:电机碰撞错误AL031:电机U, V, W 接线错误侦测AL034:编码器内部通讯异常AL035:编码器温度超过保护上限AL040:全闭环位置控制误差过大AL041:光学尺断线AL042:模拟速度电压输入过高AL044:驱动器功能使用率警告AL045:电子齿轮比设定错误AL060:绝对位置遗失AL061:编码器低电压错误AL062:绝对型位置圈数溢位AL067:编码器温度警告AL068:绝对型数据I/O传输错误AL069:电机型式错误AL06A:未建立绝对型原点坐标AL070:编码器处置未完成警告AL072:编码器过速度AL073:编码器内存错误AL074:编码器single-turn错误AL075:编码器绝对圈数错误AL077:编码器内部错误AL079:编码器参数设置AL07A:编码器Z相位置遗失AL07B:编码器内存忙碌AL07C:转速超过200 rpm时下达清除绝对位置命令AL07D:当出现AL07C后,如果没有解除AL07C重新上电,会停止电机动作AL07E:编码器清除程序错误AL083:电流侦测范围异常AL085:回生异常AL086:输入电压过高AL095:回生电阻断线AL099:DSP韧体升级AL111:CANopen SDO接收溢位AL112:CANopen PDO接收溢位AL121:CANopen PDO存取时,Index错误:CANopen PDO存取时,Sub-Index错误AL123:CANopen PDO存取时,数据Size错误AL124:CANopen PDO存取时,数据范围错误AL125:CANopen PDO对象是只读,不可写入AL126:CANopen PDO对象,不允许PDOAL127:CANopen PDO对象,Servo On时,不允许写入AL128:CANopen PDO对象,由EEPROM读取时错误AL129:CANopen PDO对象,写入EEPROM时错误AL130:CANopen PDO对象,EEPROM的地址超过限制CRC计算错误AL132:CANopen PDO对象,写入密码错误AL170:CANopen Heartbeat或NodeGuarding错误NodeGuarding错误AL186:Bus offAL201:CANopen 数据初始错误AL207:PR命令Type 8来源参数群组超出范围:PR命令Type 8来源参数群组超出范围AL213~ AL217:PR程序写入参数错误AL231:PR命令Type 8来源监视项目超出范围10-31AL235:PR命令溢位10-32AL237:分度坐标未定义AL245:PR定位超时AL249:PR定位超时AL283:软件正向极限10-33AL285:软件负向极限AL289:位置计数器溢位AL291:Servo OFF异常同步失效10-34AL302:CANopen同步信号太快AL303:CANopen同步信号超时AL304:CANopen IP命令失效AL305:SYNC Period错误AL35F:紧急停止(减速过程中)10-35AL380:位置偏移警报AL3CF:紧急停止AL3F1:通讯型绝对位置命令错误10-36AL400:分度坐标错误AL401:Servo On 时收到NMT Reset命令AL404:PR特殊滤波器设定过大AL500:STO功能被启动AL501:STO_A lost (信号遗失或错误)AL502:STO_B lost (信号遗失或错误)10-37AL503:STO_errorAL555:系统故障10-3810.5发生异常后解决异警的方法10-3910-40第十章异警排除 ASDA-A2系列10-41第十章异警排除 ASDA-A2系列10-42。

台达伺服报警一览表在工业自动化领域,台达伺服系统因其出色的性能和稳定性而备受青睐。
然而,在使用过程中,可能会遇到各种报警情况。
了解这些报警信息对于及时排除故障、保障设备正常运行至关重要。
下面为您详细介绍台达伺服的常见报警。
首先是“AL001 过电流”报警。
当驱动器侦测到输出电流超过硬件保护值时,就会触发此报警。
造成过电流的原因可能有多种,比如电机短路、驱动器硬件故障、电机负载突然增大等。
解决方法通常包括检查电机和线缆是否短路、减轻电机负载、更换驱动器等。
“AL002 过电压”报警也是较为常见的一种。
电源电压过高或者驱动器内部的再生能量无法及时消耗,都可能导致过电压报警。
这时,需要检查输入电源电压是否稳定在规定范围内,合理调整加减速时间以减少再生能量的产生,必要时安装外置再生电阻来消耗多余能量。
“AL003 低电压”报警则表明电源输入电压低于驱动器的正常工作范围。
可能是电源故障、线路接触不良或者供电不足等原因引起。
解决措施包括检查电源线路、确保输入电压符合要求、修复或更换电源设备。
“AL004 电机匹配异常”报警一般是由于驱动器和电机的参数不匹配导致的。
比如电机型号设置错误、编码器参数不正确等。
需要重新确认电机型号和参数,并在驱动器中进行正确的设置。
“AL005 回生异常”报警通常与再生电阻相关。
可能是再生电阻未连接、阻值不正确或者再生电阻过热等原因。
解决办法是检查再生电阻的连接情况,确保其阻值符合要求,并检查散热条件。
“AL006 过载”报警意味着电机负载超过了驱动器的额定负载能力。
可能是机械部件卡住、负载过重或者电机选型不当等原因。
此时需要检查机械传动部分是否正常,减轻负载,或者更换更大功率的电机和驱动器。
“AL007 速度偏差过大”报警表示电机实际运行速度与设定速度偏差超过允许范围。
这可能是由于速度指令异常、编码器故障或者控制参数设置不当等引起。
应检查速度指令的输入是否正常,检测编码器的工作状态,以及优化控制参数。

汇川伺服电机报警代码一览表在工业自动化领域,汇川伺服电机凭借其出色的性能和稳定性,得到了广泛的应用。
然而,在使用过程中,可能会遇到各种报警情况。
了解这些报警代码的含义和对应的解决方法,对于快速排除故障、恢复生产至关重要。
下面为您详细列出汇川伺服电机常见的报警代码。
报警代码 E01:过速报警当电机的转速超过了设定的最大允许值时,就会触发 E01 报警。
这可能是由于给定速度过高、负载突变或者电机参数设置不正确等原因引起的。
解决方法是检查速度给定值,确保其在合理范围内;检查负载情况,是否存在卡死或突然增大的负载;重新确认电机的参数设置是否与实际电机匹配。
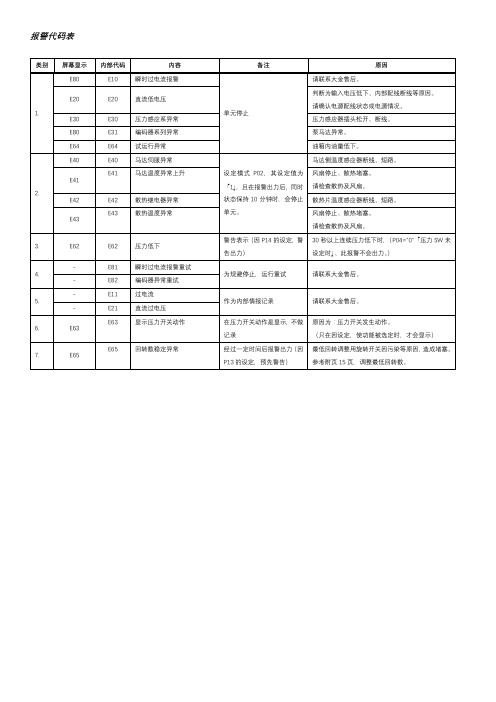
报警代码 E02:主电路过压E02 报警通常表示主电路的电压超过了正常范围。
可能的原因有电源电压过高、制动电阻故障或者再生能量过大。
首先,需要测量电源电压,看是否超出了电机的额定电压范围。
若电源正常,检查制动电阻是否损坏或接线不良。
如果是再生能量过大导致的,可能需要调整加减速时间或者增加制动电阻的容量。
报警代码 E03:主电路欠压主电路电压低于允许的最小值时,会出现 E03 报警。
这可能是由于电源故障、电源线路接触不良或者电源容量不足引起的。
解决措施包括检查电源输入是否正常,紧固电源线路的连接;如果电源容量不足,需要更换更大容量的电源。
报警代码 E04:过载当电机的负载超过了其额定负载能力时,会触发 E04 报警。
可能是由于机械部件卡死、负载过大或者电机选型不当。
此时,需要检查机械传动部分是否顺畅,减轻负载;确认电机的选型是否能够满足实际负载需求,如果不能,需要更换更大功率的电机。
报警代码 E05:电机过热E05 报警表示电机的温度过高。
可能是由于环境温度过高、散热不良、长时间过载运行或者电机内部故障。
首先要改善电机的工作环境,加强通风散热;检查电机的风扇是否正常运转;避免长时间过载运行。
如果问题仍然存在,可能是电机内部出现故障,需要进行维修或更换。
报警代码 E06:编码器故障编码器是用于反馈电机位置和速度信息的重要部件。

注:P1-40调整参数时需停车调整,才能保存,电机运转时调整后不能保存ௐȈౢ异警排除10.1 异警一览表异警表示异警名称异警动作内容过电流主回路电流值超越电机瞬间最大电流值1.5倍时动作过电压主回路电压值高于规格值时动作低电压主回路电压值低于规格电压时动作电机磁场位置异常 Z 脉冲所对应磁场角度异常回生异常回生控制作动异常时动作过负载电机及驱动器过负载时动作过速度电机控制速度超过正常速度过大时动作异常脉冲控制命令脉冲命令的输入频率超过硬件界面容许值时动作位置控制误差过大位置控制误差量大于设定容许值时动作芯片执行超时芯片异常时动作编码器异常编码器产生脉冲信号异常时动作校正异常执行电气校正时校正值超越容许值时动作紧急停止紧急按钮按下时动作逆向极限异常逆向极限开关被按下时动作正向极限异正向极限开关被按下时动作IGBT温度异常 IGBT温度过高时动作存储器异常存储器(EE-PROM存取异常时动作芯片通讯异常芯片通讯异常时动作串行通讯异常 RS-232/485通讯异常时动作串行通讯超时 RS-232/485通讯超时时动作命令写入异常控制命令下达异常时动作主回路电源缺相主回路电源缺仅单相输入预先过负载警告电机及驱动器根据参数P1-56过负载输出准位设定的百分比,预先产生过负载警告动作内部命令执行超时内部命令执行发生问题第十章异警排除|ASDA-AB系列异警表示异警名称异警动作内容芯片通讯错误硬件故障导致芯片通讯错误芯片通讯错误硬件故障导致芯片通讯错误若出现与上表内不同的异警信息时,请与当地经销商或技术人员联系。
第十章异警排除|ASDA-AB系列10.2 异警原因与处置异警表示:过电流异警原因异警检查异警处置驱动器输出短路检查电机与驱动器接线状态或导线本体是否短路排除短路状态,并防止金属导体外露电机接线异常检查电机连接至驱动器的接线顺序根据说明书的配线顺序重新配线IGBT 异常散热片温度异常送回经销商或原厂检修控制参数设定异常设定值是否远大于出厂预设值回复至原出厂预设值,再逐量修正控制命令设定异常检查控制输入命令是否变动过于剧烈修正输入命令变动率或开启滤波功能:过电压异警原因异警检查异警处置主回路输入电压高于额定容许电压值用电压计测定主回路输入电压是否在额定容许电压值以内(参照11-1使用正确电压源或串接稳压器电源输入错误(非正确电源系统用电压计测定电源系统是否与规格定义相符使用正确电压源或串接变压器驱动器硬件故障当电压计测定主回路输入电压在额定容许电压值以内仍然发生此错误送回经销商或原厂检修:低电压异警原因异警检查异警处置主回路输入电压低于额定容许电压值检查主回路输入电压接线是否正常重新确认电压接线主回路无输入电压源用电压计测定是否主回路电压正常重新确认电源开关电源输入错误(非正确电源系统用电压计测定电源系统是否与规格定义相符使用正确电压源或串接变压器第十章异警排除|ASDA-AB系列:电机磁场位置异常异警原因异警检查异警处置编码器损坏编码器异常更换电机编码器松脱检视编码器接头重新安装:回生错误异警原因异警检查异警处置回生电阻未接或过小确认回生电阻的连接状况重新连接回生电阻或计算回生电阻值回生用切换晶体管失效检查回生用切换晶体管是否短路送回经销商或原厂检修参数设定错误确认回生电阻参数(P1-52设定值与回生电阻容量参数(P1-53设定重新正确设定:过负载异警原因异警检查异警处置超过驱动器额定负载连续使用可由驱动器状态显示P0-02设定为11后,监视平均转矩[%]是否持续一直超过100%以上,提高电机容量或降低负载控制系统参数设定不当 1.机械系统是否摆振2.加减速设定常数过快1.调整控制回路增益值2.加减速设定时间减慢电机、编码器接线错误检查U、V、W及编码器接线正确接线电机的编码器不良送回经销商或原厂检修:过速度异警原因异警检查异警处置速度输入命令变动过剧用信号检测计检测输入的模拟电压信号是否异常调整输入变信号动率或开启滤波功能过速度判定参数设定不当检查过速度设定参数P2-34(过速度警告条件是否太小正确设定过速度设定P2-34(过速度警告条件第十章异警排除|ASDA-AB系列:异常脉冲控制命令异警原因异警检查异警处置脉冲命令频率高于额定输入频率用脉冲频率检测计检测输入频率是否超过额定输入频率正确设定输入脉冲频率:位置控制误差过大异警原因异警检查异警处置最大位置误差参数设定过小确认最大位置误差参数P2-35(位置控制误差过大警告条件设定值加大P2-35(位置控制误差过大警告条件设定值增益值设定过小确认设定值是否适当正确调整增益值扭矩限制过低确认扭矩限制值正确调整扭矩限制值外部负载过大检查外部负载减低外部负载或重新评估电机容量:芯片执行超时异警原因异警检查异警处置芯片动作异常电源复位检测复位仍异常时,送回经销商或原厂检修:编码器异常异警原因异警检查异警处置编码器接线错误确认接线是否遵循说明书内的建议线路正确接线编码器松脱检视驱动器上CN2与编码器接头重新安装编码器接线不良检查驱动器上的CN2与伺服电机编码器两端接线是否松脱重新连接接线编码器损坏电机异常更换电机:校正异常异警原因异警检查异警处置模拟输入接点无正确归零量测模拟输入接点的电压准位是否同接地电位模拟输入接点正确接地检测元件损坏电源复位检测复位仍异常时,送回经销商或原厂检修第十章异警排除|ASDA-AB 系列:紧急停止异警原因紧急停止开关按下异警检查确认开关位置异警处置开启紧急停止开关:逆向运转极限异常异警原因逆向极限开关按下伺服系统稳定度不够异警检查确认开关位置确认设定的控制参数及负载惯量异警处置开启逆向极限开关重新修正参数或是重新评估电机容量:正向运转极限异常异警原因正向极限开关按下伺服系统稳定度不够异警检查确认开关位置确认设定的控制参数及负载惯量异警处置开启正向极限开关重新修正参数或是重新评估电机容量:IGBT 温度异常异警原因异警检查异警处置超过驱动器额定负载连检查是否负载过大或电机电流过提高电机容量或降低负载续使用高驱动器输出短路检查驱动器输出接线正确接线:存储器异常异警原因存储器数据存取异常异警检查参数复位或电源复位异警处置复位仍异常时,送回经销商或原厂检修使用通讯长时间写入,造使用长时间通讯写入时 , 是否将复位仍异常时,送回经销商或原厂成存储器数据存取异常 P2-30 设为 5,设定此值可防止连续检修写入存储器,而降低存储器寿命。

1 / 4Ninebot 故障报警代码表故障报警代码表((用户版用户版)) V1.2V1.22014-5-5 Ninebot Inc.故障代码故障代码 对应故障对应故障 故障可能原因故障可能原因建议解决方法建议解决方法1~4电机传感器异常以下情况可能导致出现此错误: 1) 剧烈撞击或者机身进水2) 内部元件电气故障导致的电机传感器损坏 3) 开机自检过程中偶然出现的检测异常尝试重新开机,若错误仍然存在,可能电机存在故障。
请联系您的销售商或Ninebot 服务中心,可能需将Ninebot 车身送交您的销售商处检修。
电子邮件(中文/英语): service@5~8驱动器传感器异常以下情况可能导致出现此错误: 1) 剧烈撞击或者机身进水2) 内部元件电气故障导致的电机传感器损坏 3) 开机自检过程中偶然出现的检测异常尝试重新开机,若错误仍然存在,可能电机控制器存在故障。
请联系您的销售商或Ninebot 服务中心,可能需将Ninebot 车身送交您的销售商处检修。
电子邮件(中文/英语): service@9~12驱动器大功率开关管损坏通常可能由猛烈的撞击而引起的速度突变、高速旋转的轮胎被外物卡死或长时间过载而引起电压过高、电流过大,或者环境温度过高可能会导致驱动器MOSFET 晶体管损坏。
这种情况下通常伴随出现 “轮胎锁死”状态,即拖动Ninebot 很困难。
此故障用户无法自行解决。
请联系您的销售商或Ninebot 服务中心,可能需将Ninebot 车身送交您的销售商处检修。
电子邮件(中文/英语):service@13~19车辆电机驱动器其他故障通常原因为电源开关晶体管异常,或更新电机驱动器固件失败。
尝试重新开机,若仍无法解决,请联系您的销售商或Ninebot 服务中心,可能需将Ninebot 车身送交您的销售商处检修。
电子邮件(中文/英语): service@20~29车辆姿态传感器异常可能原因:1) Ninebot 车身受到剧烈撞击导致姿态传感器错位或损坏 2) 姿态传感器元器件出现故障3) 电磁干扰导致的车辆姿态传感器出现异常信号尝试重新开机、重新标定姿态传感器。
M70/M700报警说明1. 报警一览表1.1 操作报警(画面中以粗体字显示提示信息。
)M△△信息○○○○错误编号信息区分(1) 区分:M01操作错误数控系统运转时,将显示因操作员的操作错误以及机床故障引起的报警。
错误编号内 容处 理0001 近点挡块长度不足参考点返回时,近点检测用限位开关无法停在挡块上,而是越过了挡块。
·增加近点挡块的长度。
·降低参考点返回速度。
0002 Z相未通过接通电源后,在首次参考点返回中,有未通过编码器Z相的轴。
·请将编码器向参考点的反方向移动一周以上,重新进行参考点返回。
0003 参考点返回方向错误进行手动参考点返回时,通过轴选择键所选择的轴移动方向与复位方向不一致。
·轴选择键的+/-方向选择错误。
可以通过正确的方向进给来解除故障。
0004 存在外部互锁轴外部互锁功能有效(输入信号为关闭状态),且轴进入互锁状态。
·因互锁功能有效,请解除互锁后再进行操作。
·确认机床端PLC的动作。
·检查互锁信号线是否有破损。
0005 存在内部互锁轴进入内部互锁状态。
在进行绝对位置检测的轴上进行了轴取出。
在手动和自动同时有效的轴上,通过自动模式发出了指令。
·因伺服关闭功能有效,所以请解除伺服关闭功能。
·对轴取出有效状态的轴发出了指令,请进行正确操作。
·发出了与手动跳过打开方向相同的指令,请进行正确的操作。
·手动和自动同时模式中,通过自动模式发出指令的轴变成手动运转轴。
请将指令轴的手动自动有效信号关闭。
·请再次接通电源,进行绝对位置初始化。
错误编号 内 容处 理0006超过硬件行程极限过行程极限功能有效(输入信号为关闭状态),且一轴处于超行程极限状态。
·利用手动操作让机床移动。
·检查行程极限信号线是否破损。
·进行限位开关故障的确认。
0007超过软件行程极限记忆式极限I 、Ⅱ、B Ⅱ或IB 的功能有效。
我们在使用OTC焊接机器人的过程中会遇到机器人异常报警(故障代码)的时候,这样的状态下机器人停止工作,示教器上会显示报警代码,那么我们可以根据这些报警代码来确认目前焊接机器人的故障或者异常的原因,可以用相应的解决办法来解决这些故障或者异常,使OTC机器人能继续工作。
如果需要OTC机器人维修工作也可以联系我们。
今天我们先说OTC机器人异常报警时出现以下十个报警(故障)代码5264、5265、5266、5267、5268、5269、5270、
5270、5285、5286、5287时的解决维修方法就简单介绍到这里,希望能给您带来帮助,还有很多别的报警故障代码因为篇幅的原因,我们在后面会慢慢全部介绍出来。