第七章 步进梯形指令及其编程
- 格式:doc
- 大小:450.00 KB
- 文档页数:18
步进电机梯形加减速算法
步进电机梯形加减速算法,是指在步进电机控制中,通过梯形加减速算法实现步进电机从静止到达目标位置,并且达到平稳加速和减速的目的。
具体的算法步骤如下:
1. 设置加速度值、减速度值、最大速度值以及目标位置。
2. 初始化步进电机的速度为0。
3. 计算步进电机加速度的时间常数,即在单位时间内速度增加的大小。
4. 根据加速度时间常数计算加速步数,即从0速度加速到最大速度所需要的步数。
5. 根据加速步数和加速度值计算出加速段每一步的速度值。
6. 将电机速度从0开始逐步增加,直至达到最大速度。
7. 当电机速度达到最大速度后,继续保持最大速度运动到距离目标位置一定的距离。
8. 计算减速度的时间常数,即在单位时间内速度减小的大小。
9. 根据减速度时间常数计算减速步数,即从最大速度减速到0速度所需要的步数。
10. 根据减速步数和减速度值计算出减速段每一步的速度值。
11. 逐步减小电机速度,直至达到0速度。
12. 完成以上步骤后,步进电机达到目标位置。
这样通过梯形加减速算法,可以保证步进电机在加速和减速过程中平稳运动,避免了突变或者震动,提高了步进电机的运动精度和稳定性。
步进梯形图指令使用STL指令应注意以下问题:(1) STL触点与母线相连,与STL触点相连的起始触点应使用LD或LDI指令。
即使用STL 指令后,LD点移至STL触点的右侧,一直到出现下一条STL指令或RET指令为止。
RET 指令表明整个STL程序区的结束,LD点返回原母线。
各STL触点驱动的电路一般放在一起,最后一个STL电路结束时一定要使用RET指令,否则将出现“程序错误”信息,PLC不能执行用户程序。
(2) STL触点可以直接驱动或通过别的触点驱动Y、M、S、T等元件的线圈和应用指令。
STL 触点右边不能使用入栈(MPS)指令。
(3) 由于CPU只执行活动步对应的电路块,使用STL指令时允许双线圈输出,即不同的STL触点可以分别驱动同一编程元件的一个线圈。
但是同一元件的线圈不能在可能同时为活动步的STL区内出现,在有并行序列的顺序功能图中,应特别注意这一问题。
(4) 在步的活动状态的转换过程中,相邻两步的状态继电器会同时ON一个扫描周期。
为了避免不能同时接通的两个输出(如控制异步电动机正反转的交流接触器线图)同时动作,除了在梯形图中设置软件互锁电路外,还应在PLC外部设置由常闭触点组成的硬件互锁电路。
定时器在下一次运行之前,首先应将它复位。
同一定时器的线圈可以在不同的步使用,但是如果用于相邻的两步,在步的活动状态转换时,该定时器的线圈不能断开,当前值不能复位,将导致定时器的非正常运行。
(5) OUT指令与SET指令均可用于步的活动状态的转换,使新的状态继电器置位,原状态继电器自动复位,此外还有自保持功能。
SET指令一般用于驱动目标步比当前步元件号大的状态继电器。
在STL区内的OUT指令用于顺序功能图中的闭环和跳步,如果想跳回已经处理过的步,或向前跳过若干步,可对状态继电器使用OUT指令。
OUT指令还可以用于远程跳步,即从顺序功能图中的一个序列跳到另一个序列。
以上情况虽然可以使用SET指令,但最好使用OUT指令。
三菱PLC状态编程思想及步进梯形指令
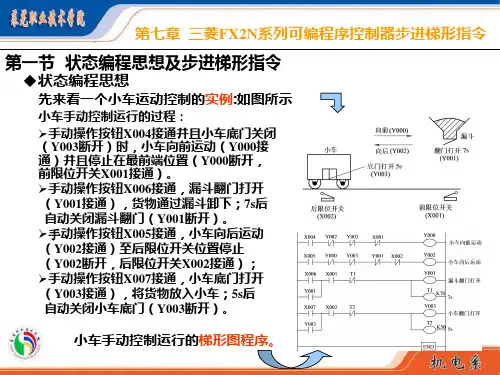
一、状态编程思想以小车运动控制为例介绍状态编程思想。
二、步进梯形指令(STL、RET)
系列PLC 的步进梯形指令是采用步进梯形图编制顺序控制状态转移图程序的指令,它包括STL 和RET 两条指令。
其中步进梯形指令STL 是利用内部状态软元件,在顺控程序上进行工序步进控制的指令;返回RET 指令是表示状态流程结束,用于返回主程序的指令。
三、步进梯形指令的特点
步进梯形指令仅对状态器S 有效,但是对于用作一般辅助继电器的状态器S,则不能采用STL 指令,而只能采用基本指令。
其特点为:
1)转移源自动复位
2)允许双重输出:
3)主控功能:使用STL 指令,取指令(LD、LDI)点移至右边。
使用RET 指令后,取指令(LD、LDI)点返回到原来的母线上。
四、步进梯形指令应用注意事项
1)状态器编号不能重复使用。
2)STL 触点断开时,与其相连的回路不动作,一个扫描周期后不再执行STL 指令。
3)状态转移过程中,在一个扫描周期内两种状态同时接通,因此为了避免不能同时接通的一对输出同时接通,除了在PLC 外部设置互锁外,在相应的程序上也应设置互锁。
4)定时器线圈与输出线圈一样,也可在不同状态间对同一定时器软元件编。
基本指令步进梯形图指令一、简介梯形图指令是计算机语言中一种深度嵌入式指令,它通过提供行走路径,来完成复杂的控制结构和计算。
它与其他编程语言的最大不同在于,它将控制结构与计算指令归入平台独立的逻辑模块,因而可以移植和管理大型计算机系统的结构。
因此,梯形图指令使软件开发更加方便和简单。
二、基本指令步进梯形图1、基本指令步进梯形图(BASIC)基本指令步进梯形图(BASIC)是一种用于编程的模板,可以按步骤执行梯形图指令。
它首先由克劳德·哈特(Clod Hart)于1962年发明。
基本指令步进梯形图可用于快速的概念验证,对初学者来说也是一种理解梯形图指令的有效方法。
它提供了明确的控制结构,有利于清晰地实现复杂的程序逻辑。
2、基本梯形图指令基本梯形图指令包括串,数值变量,决策框,复合模块,循环模块,输入模块,输出模块,结束模块等。
(1)串是梯形图指令中的一种基本控制结构,用来定义程序的行走路径。
它指定在执行完当前指令后,将控制转移到的指令的位置。
串可以表示后续指令相对于当前指令的位置,也可以用数字表示。
(2)数值变量是梯形图指令中的一种简单数据类型,可以用来保存数字和特定程序操作的数据。
它提供了一种简便的方式来调整程序参数,增加程序的灵活性和可编程性。
(3)决策框是梯形图指令中的一种用于决策控制的特殊控制结构,可以根据特定条件来决定下一步执行哪一条指令。
(4)复合模块是一种宏指令,它可以将梯形图指令的一系列步骤封装成一个独立的模块,使程序可复用性和易维护性提高很多。
(5)循环模块是梯形图指令中用于按指定条件重复执行一段程序的特殊控制模块,可以重复计算和执行程序逻辑,使程序能够正确地处理大量数据和复杂计算。
(6)输入模块是梯形图指令中用于从系统中获取所需数据的特殊控制模块,它可以实现数据的实时更新和操作。
(7)输出模块是梯形图指令中用于将处理完的结果输出给相应系统的特殊控制模块,它可以使结果显示在屏幕上,也可以保存到文件中。
第七章FX系列可编程控制器步进梯形指令内容提要:本章阐述了状态编程思想、步进梯形指令及其应用。
课程重点:步进梯形指令及其应用。
课程难点:步进指令的执行过程和有关主意事项。
教学目标:重点掌握步进梯形指令定义及功能;了解状态编程思想;能用步进梯形指令结合状态编程思想设计相对复杂的控制系统程序。
步进指令常用于时间和位移等顺序控制的操作过程。
FX系列可编程控制器的步进指令编程元件是状态继电器S0~S899共900点, 步进指令均由后备电池提供支持。
使用步进指令时,先设计状态转移图, 状态转移图中的每个状态表示顺序工作的一个操作,再将状态转移图翻译成步进梯形图。
状态转移图和步进梯形图可以直观地表示顺序操作的流程,而且可以减少指令程序的条数和容易被人们所理解。
第一节状态编程思想前面章节中所介绍的PLC基本指令,各种型号的PLC大体上都具备,指令符号虽有所不同,但功能大同小异。
应用上述指令,设计一般控制要求的梯形图程序非常方便,但对复杂控制系统来说,系统输入输出点数较多,工艺复杂、相互连锁关系也复杂,设计人员在设计中需根据工艺要求,周密地考虑各执行机构的动作及相互关系,保证必要的连锁保护、自锁及一些特殊控制要求。
因为需要考虑的因素很多,设计较为困难。
在设计过程中,往往要经过多次反复的修改和试验,才能使设计符合要求。
如何简化设计步骤,并使程序容易理解又便于维护呢?在分析生产工艺过程对控制的要求后,我们发现不少生产过程都可以划分为若干个工序,每个工序对应一定的机构动作。
在满足某些条件后,它又从一个工序转为另一个工序,通常这种控制被称为顺序控制。
对于顺序控制的梯形图,许多PLC都设置了专门用于顺序控制或称为步进控制的指令。
如三菱公司FX2N系列PLC中的 STL指令和RET(Return)指令。
顺序控制是按顺序一步一步来进行控制的,进入下一步决定于转换条件是否满足。
转换条件可以是时间条件,也可以是被控过程中的反馈信号,实际生产中往往是两者的紧密结合。
第七章FX系列可编程控制器步进梯形指令内容提要:本章阐述了状态编程思想、步进梯形指令及其应用。
课程重点:步进梯形指令及其应用。
课程难点:步进指令的执行过程和有关主意事项。
教学目标:重点掌握步进梯形指令定义及功能;了解状态编程思想;能用步进梯形指令结合状态编程思想设计相对复杂的控制系统程序。
步进指令常用于时间和位移等顺序控制的操作过程。
FX系列可编程控制器的步进指令编程元件是状态继电器S0~S899共900点, 步进指令均由后备电池提供支持。
使用步进指令时,先设计状态转移图, 状态转移图中的每个状态表示顺序工作的一个操作,再将状态转移图翻译成步进梯形图。
状态转移图和步进梯形图可以直观地表示顺序操作的流程,而且可以减少指令程序的条数和容易被人们所理解。
第一节状态编程思想前面章节中所介绍的PLC基本指令,各种型号的PLC大体上都具备,指令符号虽有所不同,但功能大同小异。
应用上述指令,设计一般控制要求的梯形图程序非常方便,但对复杂控制系统来说,系统输入输出点数较多,工艺复杂、相互连锁关系也复杂,设计人员在设计中需根据工艺要求,周密地考虑各执行机构的动作及相互关系,保证必要的连锁保护、自锁及一些特殊控制要求。
因为需要考虑的因素很多,设计较为困难。
在设计过程中,往往要经过多次反复的修改和试验,才能使设计符合要求。
如何简化设计步骤,并使程序容易理解又便于维护呢?在分析生产工艺过程对控制的要求后,我们发现不少生产过程都可以划分为若干个工序,每个工序对应一定的机构动作。
在满足某些条件后,它又从一个工序转为另一个工序,通常这种控制被称为顺序控制。
对于顺序控制的梯形图,许多PLC都设置了专门用于顺序控制或称为步进控制的指令。
如三菱公司FX2N系列PLC中的 STL指令和RET(Return)指令。
顺序控制是按顺序一步一步来进行控制的,进入下一步决定于转换条件是否满足。
转换条件可以是时间条件,也可以是被控过程中的反馈信号,实际生产中往往是两者的紧密结合。
顺序控制与逻辑控制不同,逻辑控制主要是描述输入输出信号间的静态关系,而顺序控制则主要是描述输入输出信号间的时间关系。
所以顺序控制的基本结构可以用状态转移图来描述。
状态转移图又叫状态流程图或顺序功能图,简称功能图,它是专用于工业顺序控制程序设计的一种功能说明性语言,是描述控制系统的控制过程、功能和特性的一种图形, 是分析、设计PLC顺序控制程序的一种有力工具,具有简单、直观等特点。
在中小型可编程控制器程序设计时,采用状态转移图法,首先要根据控制系统的工艺流程设计状态转移图,再将状态转移图人工转化为梯形图程序。
大型或部分中型可编程控制器,有的可直接采用状态转移图进行编程。
状态编程思想是PLC程序设计的一种很重要的很有效的编程方法。
一、利用状态编程思想来进行PLC程序设计的步骤首先要根据系统的工作过程来设计状态转移图,即将控制过程分解成若干个连续的阶段,这些阶被称为“状态”或“步”。
每一状态都要完成一定的操作。
状态与状态(步与步)之间由转换条件来分隔。
当相邻两步之间的转换条件得到满足时,转换得以实现,即上一步的活动结束而下一步的活动开始,因此不会出现步活动的相互重叠情况。
然后将状态转移图转换成梯形图。
其PLC程序设计的一般步骤是:1.按照机械工艺提供的电气执行元件功能表,用不同的PLC输入输出点编号进行定义,并设计系统的PLC接线图。
2.根据机械运动或工艺过程的工作内容、步骤、顺序和控制要求,对控制过程进行分解,并按顺序排列各个工序,对应每个工序分配一个不同的状态继电器,不同的状态继电器对应不同的PLC输出继电器或其它编程元件。
3.用不同的PLC输入继电器或其他编程元件来定义状态转换条件。
当某转换条件的实现内容不止一个时,每个内容均要定义一个PLC元件编号,并以逻辑组合形式表现出来。
4.画出状态转移图。
5.进行PLC梯形图程序设计。
二、状态编程实例为说明状态编程思想,我们来看一个实例:某自动台车在启动前位于导轨的中部,按下启动按钮后,台车在电机M的带动下,在导轨上来回移动。
图7-1是台车的示意图。
图7-1 台车运动示意图自动台车在一个工作周期里的控制工艺要求如下:1.按下启动按钮SB,电机M正转,台车前进。
2.碰到限位开关SQ1后,电机反转,台车后退。
3.台车后退碰到限位开关SQ2后,台车电机M停止5秒钟。
4.第二次前进碰到限位开关SQ3后,再次后退。
5.当后退到限位开关SQ2时,台车停止。
从而,工作周期结束。
下面以台车往返控制为例,说明运用状态编程思想设计状态转移图的方法和步骤。
1.PLC接线图的设计为设计本控制系统的梯形图,先进行PLC的I/O分配。
台车由电机M驱动,正转(前进)由PLC的输出点Y1控制,反转(后退)由Y2控制;选用定时器T0进行5秒钟的延时;将起动按钮SB及限位开关SQ1、SQ2、SQ3分别与PLC的输入点X0、X1、X2、X3相连。
其PLC的接线示意图7-2如下:图7-2 台车运动控制PLC接线图2.台车运动过程分解将整个过程按任务要求分解,其中的每个工序均对应一个状态,每个状态元件的功能和作用如下:初始状态:S0 PLC上电作好工作准备前进:S20 (输出Y1,驱动电动机M正转)后退:S21(输出Y2,驱动电动机M反转)延时5秒:S22(定时器T0,设定为5秒,延时到T0线圈接通)再前进:S23同S20再后退:S24同S21这里注意:虽然S20与S23,S21与S24功能相同,但它们是状态转移图中的不同工序,也就是不同的状态,故编号也不同。
3.列出每个状态的转移条件状态转移图就是状态和状态转移条件及转移方向构成的流程图,弄清转移条件是非常有必要的,所谓转移条件就是将下个状态“激活”的条件。
经分析可知,本控制系统中,各状态的转移条件如下:S20 的转移条件:SBS21的转移条件:SQ1S22的转移条件:SQ1S23的转移条件:T0S24的转移条件:SQ3状态的转移条件可以是单一的,也可以是多个元件的串、并联组合。
4.经过以上三步,可以得到台车往返控制的顺序状态转移图7-3。
图7-3台车运动状态转移图5.台车往返运动梯形图设计根据上面的状态转移图,可以很方便的设计出梯形图,如图7-4所示。
图7-4台车运动控制梯形图从梯形图中可看出,在台车的顺序控制过程中,每个状态在驱动负载的同时,还需对前面的状态进行复位,并置位新状态。
为了简化这些操作,许多型号的PLC都有专门用于顺序控制的指令,如日本三菱公司中用于顺序控制的步进梯形指令。
第二节步进梯形指令FX2N系列PLC除了基本指令以外,还有两条简单的步进指令,同时还有大量的状态继电器,这样就可以用类似于SFC语言的状态转移图方式编程。
用步进指令设计PLC程序,通常是利用状态转移图,而且设计的程序与状态转移图有严格而明确的对应关系。
设计时,首先要按工艺及控制要求画出系统的状态转移图,用状态寄存器对各状态命名,标出与各状态对应的执行元件的PLC输出编号和各转换条件的PLC输入编号。
然后利用步进指令编程。
许多型号的PLC都有专门用于顺序控制的指令,日本三菱公司中用于顺序控制的指令有两条:步进梯形指令(Step Ladder Instruction)简称STL指令,以及使步进指令复位的RET(Return)指令。
步进指令只能与状态继电器配合使用,三菱公司FX2N系列PLC的状态继电器元件有900点(S0~S899)。
状态继电器S可以象普通辅助继电器一样,使用OUT、SET、RST等输出指令和LD、AND、OR等触点连接指令,在这种情况下,它的功能与有断电保持功能的辅助继电器M完全相同。
但当状态继电器S与STL指令一起使用时,其功能就不一样了。
STL指令只可对状态继电器S的触点使用,因此,STL指令又称为步进触点指令,用表示。
RET为步进返回指令,用于步进触点返回左侧母线。
STL和RET指令通常要配合使用。
一、步进梯形指令的功能STL指令与RET(Return)指令具有如下功能:1.主控功能 STL指令是用来将状态继电器S的触点与母线相连并提供主控功能。
主控功能是指当使用STL指令时,与STL触点相连的起始触点要使用LD(LDI)指令。
使用STL指令后,LD(LDI)触点均移至STL触点的右侧,直至出现RET指令为止。
步进复位指令RET使LD触点返回左母线;另外,当再次出现STL指令时,以STL触点开始的回路块也同样与原母线相连。
2.自动复位功能指状态转移后原状态会自动复位的功能。
当使用STL指令时,新的状态继电器S被置位,前一个状态继电器S将自动复位。
如图7-5中,当S020被置位后,S020的STL触点接通,其控制的负载Y000被驱动;当X000触点接通后,下一步的S021将被置位,当X010触点接通后,负载Y002被驱动,同时PLC将S020自动复位,Y000也断开。
而图7-6中,当X000触点接通后,S021被置位,其STL触点接通,但状态继电器S020没有复位,此时,S020和S021的STL触点都接通。
也就是说,只有在STL 回路中,自动复位功能才有效。
图7-5状态转移图7-6状态转移图3.负载驱动功能当STL触点接通后,与这个触点相连的回路块才可执行。
STL触点可直接驱动负载(如对Y000),也可通过其它触点驱动负载(如对Y002),如图7-5所示,当STL触点断开后,与这个触点相连的回路块将不执行。
4.步进复位功能如上所述,因为使用STL指令时,LD(LDI)触点被右移,所以在需要把LD(LDI)触点返回到母线上时,要有RET指令。
值得注意的是,STL指令与RET 指令并不需要成对使用,但在系列STL电路结束时,一定要写入RET指令,否则程序将进行出错处理。
二、步进指令的执行过程和有关规定步进指令的执行过程如图7-7所示,图7-7a、图7-7b、图7-7c分别是相对应的状态转移图、步进梯形图及其指令表程序。
当步S020为活动步时,S020的STL触点控制的负载Y000接通,当转换条件X000成立时,下一步的S021将被置位,负载Y002接通,同时PLC自动将S020断开(复位),Y000也断开。
a) b) c)图7-7步进指令用法a) 状态转移图b)步进梯形图c)指令表程序从状态转移图和步进梯形图中可看出,每一状态提供三个功能:驱动负载、指定转换条件、激活目标即置位新状态(同时前面的状态自动复位)。
在状态转移图中,系统的初始状态应放在最前面,在可编程控制器开始执行用户程序时,一般用只接通一个扫描周期的初始化脉冲M8002将初始状态激活,为下一步活动状态的转移动作作准备。
当需要从某一步返回初始步时,应对初始状态使用OUT指令或SET指令。
另外,状态转移图与步进梯形图在使用时,还要注意以下几点规定:步进触点(STL触点)只有常开接点,没有常闭接点, 只用于状态继电器S的常开触点与左侧母线连接,并且同一状态继电器的STL触点只能使用一次(并行序列的合并除外)。