j i
Q i ( θ , U ) Q i s U i U j ( G i js i n i j B i jc o s i j ) 0 ,( i 1 , 2 , L , m )
j i
1 修正方程:
P(k) H (k) N(k) θ(k) Q (k)M (k) L (k)U(k) U(k)
方框1所示输入的电网数据可 与第一章表1.1所述的形成节 点导纳矩阵的输入文件格式 相同,节点输入数据的内容 见后,
方框3采用“平直电压”法。
方框7求解的修正方程修正方 程的求解应采用稀疏矩阵计 算方法以提高牛顿潮流算法 的计算效率。
2 计算节点导纳矩阵参数
3 设置节点电压初值 x(0)
4 设置 k 0及最大迭代次数 Kmax
第六步:输出迭代不收敛信息,退出迭代。
6
2.2牛顿-拉夫逊潮流算法
2.2.3 极坐标牛顿潮流算法的雅可比矩阵
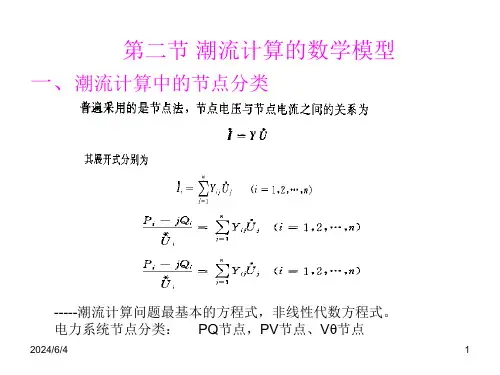
极坐标形式的潮流方程: P i ( θ , U ) P i s U i U j ( G i jc o s i j B i js i n i j ) 0 ,( i 1 , 2 , L , n 1 )
Q ( k )U ( k ) Q 1 ( k )U 1 ( k ) Q 2 ( k )U 2 ( k ) L Q m ( k )U m ( k ) T
为了加速收敛,目前通用的快速 解耦法又对B’作了下列进一步修 改。即在形成B’时略去那些对有 功功率及电压相角影响很少的输 电线元件π型等值电路的并联支 路以及变压器非标准变比,并略 去元件的串联电阻;于是,目前 通用的快速解耦潮流算法的修正 方程式如右式所示
P(k) P(θ(k),U(k))
Q(k) Q(θ(k),U(k))
θ (k) 1 (k)