自动控制原理 经典控制部分 线性系统的数学模型..
- 格式:ppt
- 大小:1.00 MB
- 文档页数:58
学习好资料欢迎下载山东科技大学《自动控制原理》(经典部分)课程教案授课时间:2007-2008学年第1学期适用专业、班级:自动化2005-1、2、3班**人:***编写时间:2007年7月)())()m n s z s p --221)(1)21)(1)i j s s T s T s ζττζ++++++ 极点形成系统的模态,授课学时:2学时章节名称第二章第三节控制系统的结构图与信号流图(1)备注教学目的和要求1、会绘制结构图。
2、会由结构图等效变换求传递函数。
重点难点重点:结构图的绘制;由结构图等效变换求传递函数。
难点:复杂结构图的等效变换。
教学方法教学手段1、教学方法:课堂讲授法为主;用精讲多练的方法突出重点,用分析举例的方法突破难点。
2、教学手段:以传统的口述、粉笔加黑板的手段为主。
教学进程设计(含教学内容、教学设计、时间分配等)一、引入(约3min)从“用数学图形描述系统的优点”引入新课。
二、教学进程设计(一)结构图的组成(约7min)1、信号线:表示信号的传递方向。
2、方框:表示输入和输出的运算关系,即C(S)=R(S)*G(S)。
3、比较点:表示两个以上信号进行代数运算。
4、引出点:一个信号引出两个或以上分支。
(二)结构图的绘制(约40min)绘制:列写微分方程组,并列写拉氏变换后的子方程;绘制各子方程的结构图,然后根据变量关系将各子结构图依次连接起来,得到系统的结构图。
例题讲解。
(二)结构图的简化(约46min)任何复杂的系统结构图,各方框之间的基本连接方式只有串联、并联和反馈连接三种。
方框结构图的简化是通过移动引出点、比较点、交换比较点,进行方框运算后,将串联、并联和反馈连接的方框合并,求出系统传递函数。
1、串联的简化:12()()()G s G s G s=2、并联的简化:12()()()G s G s G s=±3、反馈连接方框的简化:11()()1()()G ssG s H sΦ=4、比较点的移动:移动前后保持信号的等效性。
自动1. 对于一个自动控制的性能要求可以概括为三个方面: 稳定性 、 快速性 、 准确性 。
2. 反馈控制系统的工作原理是按 偏差 进行控制,控制作用使 偏差 消除或减小,保证系统的输出量按给定输入的要求变化。
3. 系统的传递函数只与系统 本身 有关,而与系统的输入无关。
4. 自动控制系统按控制方式分,基本控制方式有:开环控制系统 、 闭环控制系统 、混合控制系统 三种。
5. 传递函数G(S)的拉氏反变换是系统的单位 阶跃 响应。
6. 线性连续系统的数学模型有 电机转速自动控制系统。
7. ★系统开环频率特性的低频段,主要是由 惯性 环节和 一阶微分 环节来确定。
8. 稳定系统的开环幅相频率特性靠近(-1,j0)点的程度表征了系统的相对稳定性,它距离(-1,j0)点越 远 ,闭环系统相对稳定性就越高。
9. 频域的相对稳定性常用 相角裕度 和 幅值裕度 表示,工程上常用这里两个量来估算系统的时域性能指标。
10. 某单位反馈系统的开环传递函数2()(5)G S s s =+,则其开环频率特性是2-2.0tan -)(1πωωϕ-= ,开环幅频特性是424252)(A ωωω+=,开环对数频率特性曲线的转折频率为 。
11. 单位负反馈系统开环传递函数为2()(5)G S s s =+,在输入信号r(t)=sint 作用下,,系统的稳态输出c ss (t)= , 系统的稳态误差e ss (t)= .12. 开环系统的频率特性与闭环系统的时间响应有关。
开环系统的低频段表征闭环系统的 稳定性 ;开环系统的中频段表征闭环系统的 动态性能 ;开环系统的高频段表征闭环系统的 抗干扰能力 。
自动控制原理填空题复习(二)1、反馈控制又称偏差控制,其控制作用是通过 输入量 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 参考输入 的前馈复合控制和按 扰动 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 G 1(s)+G 2(s) (用G 1(s)与G 2(s) 表示)。
自动控制原理(佳木斯大学)智慧树知到课后章节答案2023年下佳木斯大学佳木斯大学绪论单元测试1.自动控制理论经历了经典控制理论、现代控制理论和近代控制理论三个发展阶段。
A:对 B:错答案:对第一章测试1.下列系统中属于开环控制的为()。
A:家用空调器 B:自动跟踪雷达 C:普通车床 D:无人驾驶车答案:普通车床2.下列系统属于闭环控制系统的为()。
A:普通车床 B:传统交通红绿灯控制 C:家用电冰箱 D:自动流水线答案:家用电冰箱3.下列系统属于定值控制系统的为()。
A:自动跟踪雷达 B:家用微波炉 C:自动化流水线 D:家用空调答案:家用空调4.下列系统属于随动控制系统的为()。
A:家用空调器 B:家用电冰箱 C:自动化流水线 D:火炮自动跟踪系统答案:火炮自动跟踪系统5.下列系统属于程序控制系统的为()。
A:家用空调器 B:普通车床 C:火炮自动跟踪系统 D:传统交通红绿灯控制答案:传统交通红绿灯控制6.()为按照系统给定值信号特点定义的控制系统。
A:连续控制系统 B:线性控制系统 C:离散控制系统 D:随动控制系统答案:随动控制系统7.下列不是对自动控制系统性能的基本要求的是()。
A:快速性 B:复现性 C:稳定性 D:准确性答案:复现性8.下列不是自动控制系统基本方式的是()。
A:前馈控制 B:开环控制 C:闭环控制 D:复合控制答案:前馈控制9.下列不是自动控制系统的基本组成环节的是()。
A:被控变量 B:测量变送器 C:控制器 D:被控对象答案:被控变量10.自动控制系统不稳定的过度过程是()。
A:发散振荡过程 B:衰减振荡过程 C:单调过程 D:其余选择都不是答案:发散振荡过程第二章测试1.自动控制系统的数学模型为()。
A:微分方程、传递函数、动态结构框图、信号流图 B:热学方程 C:梅森公式 D:状态方程、差分方程答案:微分方程、传递函数、动态结构框图、信号流图2.以下关于传递函数的描述,错误的是()。
自动控制原理概念最全整理要点1.在零初始条件下,线性定常系统输出量的拉普拉斯变换与输入量的拉普拉斯变换值比,定义为线性定常系统的传递函数。
传递函数表达了系统内在特性,只与系统的结构、参数有关,而与输入量或输入函数的形式无关。
2.一个一般控制系统由若干个典型环节构成,常用的典型环节有比例环节、惯性环节、积分环节、微分环节、振荡环节和延迟环节等。
3.构成方框图的基本符号有四种,即信号线、比较点、方框和引出点。
4.环节串联后总的传递函数等于各个环节传递函数的乘积。
环节并联后总的传递函数是所有并联环节传递函数的代数和。
5.在使用梅森增益公式时,注意增益公式只能用在输入节点和输出节点之间。
6.上升时间tr、峰值时间tp和调整时间t反应系统的快速性;而最大超调量Mp和振荡次数则反应系统的平稳性。
7.稳定性是控制系统的重要性能,使系统正常工作的首要条件。
控制理论用于判别一个线性定常系统是否稳定提供了多种稳定判据有:代数判据(Routh与Hurwitz判据)和Nyquit稳定判据。
8.系统稳定的充分必要条件是系统特征根的实部均小于零,或系统的特征根均在跟平面的左半平面。
9.稳态误差与系统输入信号r(t)的形式有关,与系统的结构及参数有关。
10.系统只有在稳定的条件下计算稳态误差才有意义,所以应先判别系统的稳定性。
11.Kp的大小反映了系统在阶跃输入下消除误差的能力,Kp越大,稳态误差越小;Kv的大小反映了系统跟踪斜坡输入信号的能力,Kv越大,系统稳态误差越小;Ka的大小反映了系统跟踪加速度输入信号的能力,Ka越大,系统跟踪精度越高12.扰动信号作用下产生的稳态误差en除了与扰动信号的形式有关外,还与扰动作用点之前(扰动点与误差点之间)的传递函数的结构及参数有关,但与扰动作用点之后的传递函数无关。
13.超调量仅与阻尼比ξ有关,ξ越大,Mp则越小,相应的平稳性越好。
反之,阻尼比ξ越小,振荡越强,平稳性越差。
当ξ=0,系统为具有频率为Wn的等幅震荡。
第二章 自动控制系统的数学模型研究一个自动控制系统,除了对系统进行定性分析外,还必须进行定量分析,进而探讨改善系统稳态和动态性能的具体方法。
控制系统的运动方程式(也叫数学模型)是根据系统的动态特性,即通过决定系统特征的物理学定律,如机械﹑电气﹑热力﹑液压﹑气动等方面的基本定律而写成的。
它代表系统在运动过程中各变量之间的相互关系 ,既定性又定量地描述了整个系统的动态过程。
因此,要分析和研究一个控制系统的动态特性,就必须列写该系统的运动方程式,即数学模型。
第一节 系统动态微分方程模型常用的列写系统或环节的动态微分方程式的方法有两种﹕一种是机理分析法,即根据各环节所遵循的物理规律(如力学﹑电磁学﹑运动学﹑热学等)来编写。
另一种方法是实验辩识法,即根据实验数据进行整理编写。
在实际工作中,这两种方法是相辅相成的,由于机理分析法是基本的常用方法,本节着重讨论这种方法。
下面通过简单示例介绍机理分析法的一般步骤。
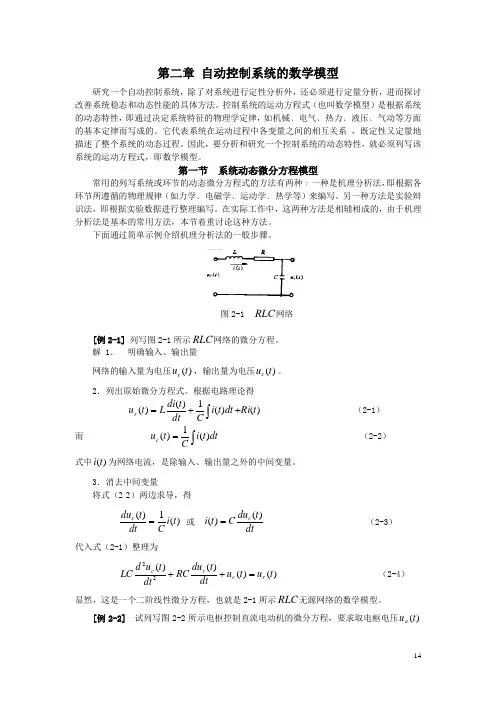
图2-1 RLC 网络[例2-1] 列写图2-1所示RLC 网络的微分方程。
解 1. 明确输入、输出量网络的输入量为电压)(t u r ,输出量为电压)(t u c 。
2.列出原始微分方程式。
根据电路理论得 )()(1)()(t Ri dt t i Cdt t di Lt u r ⎰++= (2-1) 而 ⎰=dt t i C t u c )(1)( (2-2) 式中)(t i 为网络电流,是除输入、输出量之外的中间变量。
3.消去中间变量将式(2-2)两边求导,得)(1)(t i C dt t du c = 或 dtt du C t i c )()(= (2-3) 代入式(2-1)整理为 )()()()(22t u t u dt t du RC dtt u d LC r c c c =++ (2-4) 显然,这是一个二阶线性微分方程,也就是2-1所示RLC 无源网络的数学模型。
[例2-2] 试列写图2-2所示电枢控制直流电动机的微分方程,要求取电枢电压)(t u a(V )为输入量,电动机转速)(t m ω)(s rad 为输出量。
第一章绪论第一节引言1.自动控制学科由自动控制技术和自动控制理论两部分组成。
2.自动控制理论分为经典控制理论和现代控制理论两大部分。
经典控制理论也就是自动控制原理。
第二节自动控制的基本概念1.开环控制系统:系统的输出端和输入端不存在反馈回路。
2.闭环控制系统:反馈回路使系统构成闭环,并按偏差的性质产生控制作用,以减少或消除偏差的控制系统。
第三节自动控制系统的组成1.系统:由被控对象和自动控制装置按一定的方式连结起来,以完成某种自动控制任务的有机整体。
第二章自动控制系统的数学模型第一节控制系统微分方程的编写1.线性元件的微分方程2.非线性微分方程的线性化第二节传递函数1.传递函数:线性系统(或元件)在初始条件为0时,输出量的拉氏变化与输入量的拉氏变化之比称为该系统的传递函数,记为G(s)。
2.在零初始条件下,电路中的复数阻抗和电流、电压的相量及其拉氏变换之间的关系应满足各种电路定律。
3.一个传递函数只能表示一个输入量对一个输出量的关系,若输入量、输出量多于一个,则传递函数不止一个。
对于多输入、多输出的系统,显然不能用某一个传递函数来描述各变量间的关系,而要用现代控制理论中的传递矩阵来表示。
第三节控制系统的结构图及其等效变换第三章自动控制系统的时域分析第一节1.系统稳定的充分必要条件:特征方程的全部系数都是正数,并且劳斯表第一列元素都是正数。
2.由开环传递函数得到闭环系统的传递函数。
3.相对稳定性。
劳斯判定的是绝对稳定性。
4.结构不稳定系统的改进措施:改变积分环节性质和引入比例-微分环节。
第二节典型输入信号和阶跃响应性能指标1.时间响应等于瞬态响应与稳态响应的和。
2.研究自动控制系统在典型输入信号作用下输出信号随时间的变化,称为自动控制系统的时域分析。
3.根据响应曲线的特征值,比较不同系统的动态性能。
第三节1.一阶系统的动态性能指标:调节时间,无超调量、峰值时间、上升时间和振荡次数。
第四节1.系统的阻尼系数和系统的无阻尼振荡角频率决定了二阶系统的瞬态响应特征,被称为二阶系统的特征参数。
自动控制理论答案王孝武【篇一:哈尔滨工业大学2007年402自动控制理论考试大纲】自动控制理论〔402〕一、考试要求要求考生准确掌握、深入理解“自动控制理论”中的基本概念、基本理论、计算方法,并能灵活运用所学理论对自动控制系统进行分析和设计,具有较强的分析问题和解决问题的能力。
二、考试内容经典控制理论部分(占总分的80—85%):1)自动控制的基本概念l 开环控制、闭环控制l 控制系统的主要问题及动态指标2)线性系统的数学模型l 数学模型及系统微分方程的建立l 非线性微分方程的线性化l 传递函数及典型环节的传递函数l 方框图及控制系统的传递函数l 信号流程图3)自动控制系统的时域分析l 典型输入信号l 一阶系统的响应l 二阶系统的响应及动态性能指标l 高阶系统的响应l 控制系统的稳定性l 劳斯稳定判据、霍尔维茨稳定判据l 稳态误差4)根轨迹法l 根轨迹的基本概念l 绘制根轨迹的幅值及幅角条件l 普通根轨迹的绘制规则l 参数根轨迹l 零度根轨迹l 滞后系统的根轨迹l 根轨迹的应用5)频率法l 频率特性的基本概念l 频率特性的表示方法l 典型环节的频率特性及其图像l 系统开环频率特性的绘制l 控制系统的稳定性l 控制系统的稳态性能与频率特性的关系l 控制系统的动态性能与频率特性的关系l 闭环频率特性l 典型Ⅱ型系统的频—时域关系6)自动控制系统的校正综合l 校正综合的一般概念l 基本控制规律l 串联超前校正(应用频率法、根轨迹法进行串联超前校正) l 串联滞后校正(应用频率法、根轨迹法进行串联滞后校正) l 串联滞后—超前校正l 希望特性法(期望特性法)l 反馈校正7)非线性系统分析l 非线性系统概述l 描述函数非线性、继电非线性)l 描述函数的应用l 相平面法l 相轨迹的绘制l 相平面图的应用现代控制理论基础部分(占总分的15—20%):1)线性系统的状态空间描述l 微分方程描述与状态变量描述l 化高阶微分方程为状态方程l 传递函数变换为状态空间表达式l 传递函数矩阵l 由状态空间表达式求传递函数矩阵l 状态方程的线性变换2)状态方程的解l 齐次状态方程的解l 矩阵指数函数l 非齐次状态方程的解l 线性时变系统状态方程的解l 状态转移矩阵3)线性控制系统的能控性与能观性l 线性定常连续系统的能控性l 线性定常连续系统的能观测性l 能控标准性与能观测标准型4)控制系统的稳定性l 关于稳定性的定义l 李雅普诺夫第一法l 李雅普诺夫第二法l 李氏直接法在线性系统中的应用5)状态反馈与极点控制l 状态反馈与输出反馈的状态空间表达式 l 采用状态反馈时的极点配置l 状态估计与状态观测器三、试卷结构考试时间180分钟,满分150分l 应用概念分析、理解题(20分)l 理论分析计算题(70分)l 设计计算题(30分)l 综合应用题(30分)四、参考书目l 夏德钤. 《自动控制理论》. 机械工业出版社 l 李友善. 《自动控制原理》. 国防工业出版社 l 戴宗达. 自动控制理论基础. 清华大学出版社 l 王孝武. 《现代控制理论基础》. 机械工业出版社【篇二:2010 西安理工考研专业】①101思想政治理论②204英语二③302数学二④817控制理论(经典控制理论70%;现代控制30%)或818电力电子技术或844供电技术或849电力系统分析(稳态分析70%、暂态分析30%)②复试在512电路、531微机原理及应用中选一080802电力系统及其自动化③④①101思想政治理论②201英语一③301数学一④819电路或849电力系统分析(稳态分析70%、暂态分析30%) 在547电力系统继电保护、548电力系统自动装置中选一2011 陕科大①101思想政治理论②204英语二③302数学二④817控制理论(经典控制理论70%;现代控制30%)或818电力电子技术或844供电技术或849电力系统分析(稳态分析70%、暂态分析30%)②③在512电路、531微机原理及应用中选一817 控制理论(经典控制理论 70% ;现代控制 30% )《自动控制理论》机械工业出版社刘丁主编《现代控制系统》科学出版社 [ 美 ]r.c. 多尔夫, r.h. 毕晓普著《现代控制理论基础》机械工业出版社王孝武主编 818 电力电子技术《电力电子技术》 2000年机械工业出版社王兆安黄俊 844 供电技术《供电技术》机械工业出版社余健明849 电力系统分析(稳态分析 70%,暂态分析30%)《电力系统稳态分析》水利电力出版社陈珩《电力系统暂态分析》水利电力出版社李光琦 512 电路《电路》(第四版)高等教育出版社邱关源 531 微机原理及应用《微型计算机原理及应用》 2000年第一版西安交通大学出版社薛钧义④_ 01电力系统优化与运行研究_ 02供、配电系统自动化应用技术研究 _ 03电力系统的测量与控制 _ 04定制电力技术 _ 05智能电网 _ 06电网优化规划 _ 07电力系统继电保护_ 08电力电子技术与现代交流调速 _ 09电力电子技术与计算机控制 _ 10电力电子装置与计算机控制技术_ 11电力电子与新能源发电及新型电能储存技术_ 12电力电子与新能源发电及新型电能储存技术 _ 13电力电子与新能源发电技术 _ 14电力传动与网络控制 _ 15电能质量分析与控制技术研究_ 16电力电子技术及其在电力系统中的应用【篇三:上海应用技术学院2016考研参考书目】ss=txt>2016考研各院校硕士考研招生简章陆续发布,凯程考研勤劳的老师们及时为大家跟踪发布整合,帮助考生及时了解各院校专业考研招生简章、考研专业目录及考研参考书目,更好的复习。
《自动控制原理》题库一、解释下面基本概念1、控制系统的基本控制方式有哪些?2、什么是开环控制系统?3、什么是自动控制?4、控制系统的基本任务是什么?5、什么是反馈控制原理?6、什么是线性定常控制系统?7、什么是线性时变控制系统?8、什么是离散控制系统?9、什么是闭环控制系统?10、将组成系统的元件按职能分类,反馈控制系统由哪些基本元件组成?11、组成控制系统的元件按职能分类有哪几种?12、典型控制环节有哪几个?13、典型控制信号有哪几种?14、控制系统的动态性能指标通常是指?15、对控制系统的基本要求是哪几项?16、在典型信号作用下,控制系统的时间响应由哪两部分组成?17、什么是控制系统时间响应的动态过程?18、什么是控制系统时间响应的稳态过程?19、控制系统的动态性能指标有哪几个?20、控制系统的稳态性能指标是什么?21、什么是控制系统的数学模型?22、控制系统的数学模型有:23、什么是控制系统的传递函数?24、建立数学模型的方法有?25、经典控制理论中,控制系统的数学模型有?26、系统的物理构成不同,其传递函数可能相同吗?为什么?27、控制系统的分析法有哪些?28、系统信号流图是由哪二个元素构成?29、系统结构图是由哪四个元素组成? 30、系统结构图基本连接方式有几种?31、二个结构图串联连接,其总的传递函数等于? 32、二个结构图并联连接,其总的传递函数等于?33、对一个稳定的控制系统,其动态过程特性曲线是什么形状? 34、二阶系统的阻尼比10<<ξ,其单位阶跃响应是什么状态? 35、二阶系统阻尼比ξ减小时,其阶跃响应的超调量是增大还是减小?36、二阶系统的特征根是一对负实部的共轭复根时,二阶系统的动态响应波形是什么特点?37、设系统有二个闭环极点,其实部分别为:δ=-2;δ=-30,问哪一个极点对系统动态过程的影响大?38、二阶系统开环增益K 增大,则系统的阻尼比ξ减小还是增大? 39、一阶系统可以跟踪单位阶跃信号,但存在稳态误差?不存在稳态误差。
胡寿松自动控制原理第七版经典部分摘要:一、胡寿松《自动控制原理》第七版的主要内容二、书中的经典部分概述三、经典部分的主要知识点和应用四、书中的优点和适用对象正文:一、胡寿松《自动控制原理》第七版的主要内容胡寿松所著的《自动控制原理》第七版是一本关于自动控制原理的专业教材。
全书共分十章,前八章主要介绍经典控制理论及其应用,包括控制系统的数学模型、时域分析法、根轨迹法、频域分析法等内容。
后两章则深入讲解了现代控制理论中的线性系统理论和控制理论。
二、书中的经典部分概述书中的经典部分主要涉及控制系统的基本概念、数学模型及其结构图和信号流图,以及线性控制系统的时域分析法、根轨迹法、频域分析法等。
这些内容是自动控制原理的基础,对于理解和掌握自动控制有着重要意义。
三、经典部分的主要知识点和应用经典部分主要知识点包括:1.控制系统的基本概念:包括反馈控制、开环控制和闭环控制等;2.数学模型:包括时域模型、频域模型和复域模型;3.结构图和信号流图:用于描述控制系统的结构和信号流动;4.时域分析法:用于分析控制系统的稳定性和稳态误差;5.根轨迹法:用于分析控制系统的稳定性和动态性能;6.频域分析法:用于分析控制系统的稳定性和频域响应。
这些知识点在实际工程中有着广泛的应用,例如在控制系统设计、分析和调试中,以及在解决实际控制问题时都需要运用这些理论。
四、书中的优点和适用对象《自动控制原理》第七版有着以下优点:1.内容全面:深入浅出地介绍了自动控制的基本概念和理论,同时涵盖了经典和现代控制理论的主要内容;2.理论严谨:书中的理论阐述严谨,逻辑清晰,便于读者理解和掌握;3.适用对象广泛:本书可作为高等工科院校自动化、电气工程及其自动化、测控技术与仪器、机械工程、能源与动力工程、冶金工程等专业的教材,亦可供从事自动控制类的各专业工程技术人员参考。
自动控制原理总经典总结《自动控制原理》总复习控制线性非线连续离散描述函相平面建模-时域法串联(频率法)建模-求稳定性负倒描述函数曲线自振点振幅、频绘制相求奇点和极限环求运动校正第一章 自动控制的基本概念一、学习要点1. 自动控制基本术语:自动控制、系统、自动控制系统、被控量、输入量、干扰量、受控对象、控制器、反馈、负反馈控制原理等。
2. 控制系统的基本方式:①开环控制系统;②闭环控制系统;③复合控制系统。
3. 自动控制系统的组成:由受控对象和控制器组成。
4. 自动控制系统的类型:从不同的角度可以有不同的分法,常有:恒值系统与随动系统;线性系统与非线性系统;连续系统与离散系统;定常系统与时变系统等。
5. 对自动控制系统的基本要求:稳、快、准。
6. 典型输入信号:脉冲、阶跃、斜坡、抛物线、正弦。
二、基本要求1. 对反馈控制系统的基本控制和方法有一个全面的、整体的了解。
2. 掌握自动控制系统的基本概念、术语,了解自动控制系统的组成、分类,理解对自动控制系统稳、准、快三方面的基本要求。
3. 了解控制系统的典型输入信号。
4. 掌握由系统工作原理图画方框图的方法。
三、内容结构图自动控制的由系统工作原对控制系统常用术语、基本控反馈控制系控制系控制系四、知识结构图第二章 控制系统的数学模型一、学习要点1.数学模型的数学表达式形式(1)物理系统的微分方程描述;(2)数学工具—拉氏变换及反变换; (3)传递函数及典型环节的传递函数;(4)脉冲响应函数及应用。
2.数学模型的图形表示(1)结构图及其等效变换,梅逊公式的应用;(2)信号流图及梅逊公式的应用。
二、基本要求1、正确理解数学模型的特点,对系统的相似性、简化性、动态模型、静态模型、输入变 量、输出变量、中间变量等概念,要准确掌握。
2、了解动态微分方程建立的一般方法及小偏差线性化的方法。
3、掌握运用拉氏变换解微分方程的方法,并对解的结构、运动模态与特征根的关系、零输入 响应、零状态响应等概念有清楚的理解。
自动控制原理总经典总结自动控制原理》总复控制系统控制系统是由受控对象和控制器组成的系统,用于控制和调节被控量。
根据不同的角度,控制系统可以分为恒值系统和随动系统、线性系统和非线性系统、连续系统和离散系统、定常系统和时变系统等。
线性系统线性系统是指系统的输出与输入之间存在线性关系的系统。
建模时可以采用求传函或脉冲传函的方法,分析时可使用根轨迹法、频率特性法等方法。
非线性系统非线性系统是指系统的输出与输入之间不存在线性关系的系统。
建模时可以采用描述函数法或相平面法,稳定性分析时可以求奇点和极限环,运动时间可以通过振幅和频率计算得出。
控制系统的基本概念控制系统的基本术语包括自动控制、系统、自动控制系统、被控量、输入量、干扰量、受控对象、控制器、反馈、负反馈控制原理等。
掌握这些基本概念可以帮助理解控制系统的基本组成和工作原理。
基本控制方式控制系统的基本方式包括开环控制系统、闭环控制系统和复合控制系统。
开环控制系统没有反馈,闭环控制系统则通过反馈控制来实现对被控量的调节,复合控制系统则是开环控制和闭环控制的组合。
数学模型数学模型是用数学表达式描述控制系统的工作原理和特性的模型。
建模时可以采用物理系统的微分方程描述、拉普拉斯变换及反变换、传递函数及典型环节的传递函数、脉冲响应函数等方法。
图形表示可以采用结构图、信号流图等方法。
基本要求研究自动控制原理需要掌握控制系统的基本概念、基本控制方式、数学模型等知识。
同时,需要了解控制系统的分类和典型输入信号,并能够正确理解数学模型的特点和概念。
掌握这些知识可以帮助理解控制系统的工作原理和实际应用。
2.了解动态微分方程建立的一般方法和小偏差线性化方法。
3.掌握使用拉普拉斯变换解微分方程的方法,并对解的结构、运动模态、特征根的关系、零输入响应、零状态响应等概念有清晰的理解。
4.正确理解传递函数的定义、性质和意义,并熟练掌握系统开环传递函数、闭环传递函数、误差传递函数、典型环节传递函数等概念。
天津大学2020年硕士研究生初试考试自命题科目大纲(自动控制理论)(考试大纲是考研学生复习的重要参考资料,是关于考试科目、题型设置及知识点要求的指导性文件,目的是为便于报考者了解、准备和参加考试,它指出了所考科目的大致考试范围,也是考研命题的重要参考依据。
祝君考上理想院校。
)一、考试的总体要求包括经典控制理论和现代控制理论两部分,主要考察学生对自动控制系统进行分析和设计的能力。
二、考试内容及比例经典控制理论部分(占60%)现代控制理论部分(占40%):1、控制系统的数学模型系统的微分方程描述和传递函数描述,传递函数及其零点和极点,简单被控对象或系统的模型,结构图及其简化,信号流图与梅逊增益公式,简单的物理模型和电网络模型。
2、控制系统的时域分析控制系统的稳定性,劳斯与赫尔维茨稳定判据,控制系统的动态性能、稳态性能和稳态误差,典型输入下系统的响应,一阶和二阶系统的响应及其指标,高阶系统的主导极点和动态性能的估算。
3、控制系统的根轨迹分析一般根轨迹、广义根轨迹(零度根轨迹、参数根轨迹)绘制法则,利用根轨迹对系统的性能分析。
4、控制系统的频域分析系统的频率特性,幅相频率特性曲线的绘制,对数频率(渐近)特性曲线的绘制,系统的开环频率特性、闭环频率特性及其指标,系统频域指标和时域指标之间的关系,简单的延迟系统稳定性判别,奈奎斯特稳定性判据,稳定裕度。
5、控制系统的校正与综合无源、有源校正网络,串联超前校正、滞后校正,按期望频率特性进行校正,复合校正。
6、系统的状态空间分析方法系统的状态空间表达式,线性变换,状态转移矩阵,状态方程的解,系统的能控性、能观性及其判定方法,系统的能控、能观标准型和约当标准型,系统的结构分解,系统的状态空间实现与最小实现。
7、系统的状态空间设计方法系统的状态反馈和输出反馈,系统的极点配置,系统的镇定问题,能稳(能镇定)与能检测性,状态反馈解耦,状态观测器设计,基于状态观测器的综合。
《自动控制理论II》中英文课程简介英文名称:Automatic Control Principle 课程编号:适用专业:安全工程测控技术与仪器电气工程及其自动化学时:72学分:4实验学时:8课内上机学时:0一、预修课程高等数学Ⅰ、复变函数与积分变换Ⅰ、线性代数Ⅰ、电路分析基础二、中文内容提要《自动控制理论II》主要介绍了自动控制理论的基本概念、分析方法和设计方法。
通过本课程的学习,使学生能够建立起控制系统的数学模型,利用经典控制理论和现代控制理论的分析方法进行系统的性能分析,并能够根据系统性能指标的要求进行系统的设计。
三、英文内容提要Automatic Control Principle mainly introduces: basic conceptions of automatic control principle, analytical methods, and design methods. The purpose is that students can found a mathematic model and systematically analyze capability of system and design system according to demand of capability index by studying this course.四、教材:《自动控制原理》.胡寿松.科学出版社,2004年五、教材类别:校外编制订者(签字):校对者(签字):审定者(签章):批准者(签章):《自动控制理论Ⅱ》课程教学大纲英文名称:Automatic Control Principle课程编号:适用专业:安全工程测控技术与仪器电气工程及其自动化学时:72 学分:4课程类别:学科大类基础课课程性质:必修课一、课程的性质和目的本课程是一门必修课。
通过本课程的学习,使学生建立经典控制理论部分的基本概念,学习现代控制理论的基本内容,掌握反馈控制原理的应用以及系统分析和设计的一般规律,同时,通过本课程的学习,使学生建立线性离散系统控制理论的基本概念,掌握线性离散系统分析和设计的一般规律。