H桥电路驱动原理(经典)
- 格式:pdf
- 大小:280.71 KB
- 文档页数:4
h桥直流电机驱动电路
H桥直流电机驱动电路是一种常用的电机驱动电路,可实现正反转控制,广泛应用于各种机械设备中。
它由四个开关管组成,形成了一个H形结构,因此称为H桥电路。
H桥电路的工作原理是将直流电源的正负极分别接到H桥电路的两端,通过控制四个开关管的导通和截止,可以实现电机的正反转控制。
具体来说,当两个对角线上的开关管导通时,电机会顺时针旋转;当另外两个对角线上的开关管导通时,电机会逆时针旋转。
H桥直流电机驱动电路有许多优点,如控制简单、反向制动、高效能、易维护等。
但也有一些局限性,如需要高压、高电流驱动、较高的成本等。
总之,H桥直流电机驱动电路是一种非常实用的电机驱动电路,其正反转控制的特点使其在各种机械设备中得到广泛应用。
- 1 -。
H桥电机驱动工作原理
H桥电机驱动由四个开关元件组成,分别为两个与电机负载串联的开
关管T1和T4,以及两个与电机负载并联的开关管T2和T3、其中,T1和
T4可以共同控制电机的正向和反向转动,而T2和T3则用于控制电机的
停止和制动。
在电机驱动的过程中,当T1和T4导通,而T2和T3断开时,电流将
从电源经过T1、电机负载、T4回到电源,此时电机将会正转。
当T1和
T4断开,而T2和T3导通时,电流将从电源经过T3、电机负载、T2回到
电源,此时电机将会反转。
通过不断地控制T1、T4和T2、T3的导通和断开,可以实现电机的正反转。
要控制电机的速度,可以通过控制T1、T4和T2、T3的导通时间比例
来实现。
当导通时间比例高时,电机的转速将增加,反之,转速将减小。
这通常是通过PWM(脉宽调制)信号来实现的,PWM信号的占空比决定了
开关管导通时间的比例。
PWM信号的频率一般在几千赫兹到几十千赫兹之间。
在实际的电机驱动中,还需要考虑到开关管导通和断开时的过渡过程。
为了防止开关管在导通和断开时出现过大的电压或电流冲击,可以通过添
加反并行二极管来实现电流的自由流通和电压的自由回路。
这样可以保护
开关管并提高系统的稳定性和可靠性。
总之,H桥电机驱动通过控制四个开关管的导通和断开,实现电机的
正反转和速度控制。
同时,通过添加反并行二极管可以实现电流和电压的
平滑过渡,提高系统的稳定性和可靠性。
这使得H桥电机驱动成为了一种
常用的电机驱动方式。
一、背景此问题一直想留给做小车的同学去研讨,期望他们在制作过程中能够悟出其中的道理。
可无奈等至今日也未见一文半字 : ( 却接到了无数的质询:你为何要用分立元件构建 H 桥驱动?为何不选择 L298 集成电路桥?为何要使用 MOS 管?等等……,逐个回复太累了,只好整理一下,汇总于此,供参考,有不妥之处望指正,更望能有人提出进一步的分析。
二、分析内容界定本文只涉及有刷直流电机 H 桥驱动部分的电路,不讨论如何控制 H 桥?如何实现 PWM?以及如何实现过流保护等;而且主要讨论构成 H 桥 4 个桥臂对性能的影响。
三、H桥原理简述所谓 H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下:从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。
4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关 A、D接通,电机为正向转动,则开关B、C接通时,直流电机将反向转动。
从而实现了电机的正反向驱动。
借助这 4 个开关还可以产生电机的另外 2 个工作状态:A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。
B)惰行—— 4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。
以上只是从原理上描述了H 桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。
细分下来,晶体管有双极性和MOS管之分,而集成电路只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。
双极性晶体管构成的 H 桥:MOS管构成的 H 桥:以下就分析一下这些电路的性能差异。
四、几种典型 H 桥驱动电路分析分析之前,首先要确定 H 桥要关注那些性能:A)效率——所谓驱动效率高,就是要将输入的能量尽量多的输出给负载,而驱动电路本身最好不消耗或少消耗能量,具体到H桥上,也就是4个桥臂在导通时最好没有压降,越小越好。
直流电机H桥驱动电路H桥功率驱动电路可应用于步进电机、交流电机及直流电机等的驱动。
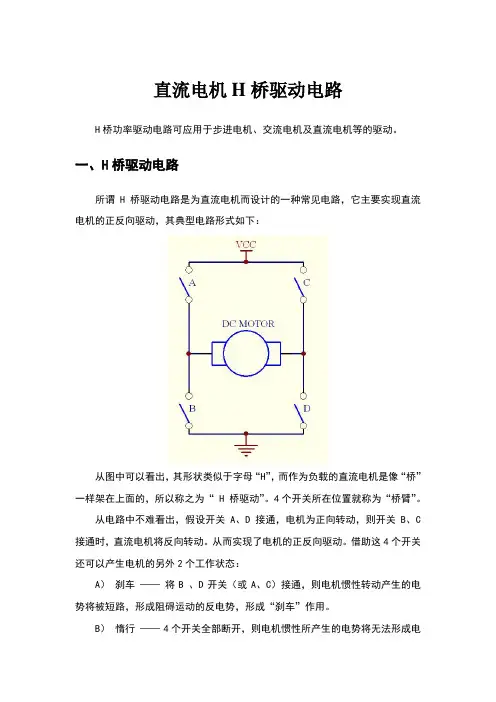
一、H桥驱动电路所谓 H 桥驱动电路是为直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下:从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。
4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关A、D接通,电机为正向转动,则开关B、C 接通时,直流电机将反向转动。
从而实现了电机的正反向驱动。
借助这4个开关还可以产生电机的另外2个工作状态:A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。
B)惰行——4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。
以上只是从原理上描述了H桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。
细分下来,晶体管有双极性和MOS管之分,而集成电路(例如L298)只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。
双极性晶体管构成的 H 桥:MOS管构成的 H 桥:二、使能控制和方向逻辑驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管TA和TB同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。
而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。
电机h桥驱动电路工作原理电机H桥驱动电路是电机驱动的一种重要方式,电子系统中经常会使用到,比如机器人、车辆控制等等。
本文将详细介绍电机H桥驱动电路的工作原理,以及应用场景。
一、H桥驱动电路概述H桥指的是由四个开关管或者MOS管组成的桥式电路。
这种电路有多种电机驱动方式,其中最常见的是单向直流电机的正反转控制。
通过对四个开关管进行控制,可以实现电机的正反转和制动等功能。
二、H桥驱动电路的工作原理H桥驱动电路的基本原理是通过改变电路的通断情况,从而对电机进行不同方向的驱动。
H桥驱动电路由四个二极管和四个MOS管组成。
其中二极管被用于保护MOS管,并防止由电机反向带来的过电压。
1. 正转控制在正转控制的情况下,S1和S4导通,S2和S3断开。
电源的正极就通过S1流向电机的正极,电机负极通过S4回流电源的负极,从而实现了电机正转。
2. 反转控制在反转控制的情况下,S2和S3导通,S1和S4断开。
电源的正极就从S2导向电机的负极,电机的正极通过S3回流电源的负极,从而实现了电机反转。
3. 制动控制在制动控制的情况下,两边都断开,或被连通在一起形成短路状态,这样可以实现电机的制动效果。
4. 制动后反转如果电机在制动状态下需要反转,那么可以先将电机停下,再进行反转操作,这样可以得到较好的反转效果。
三、H桥驱动电路的应用场景H桥驱动电路广泛应用于机器人、车辆、船舶等控制系统中,在这些应用场景中,电机是控制系统的一个非常关键的组成部分。
H桥驱动电路不仅可以实现电机的正反转控制,还可以用于调速控制、测速控制等多种应用场景中。
1. 机器人应用机器人在工业自动化、医疗保健、家庭助理、智能安防等众多领域都有广泛的应用。
机器人的驱动系统主要是电机驱动,而H桥驱动电路是机器人驱动系统中的重要组成部分。
机器人需要精准的控制,以实现复杂的动作,H桥驱动电路可以实现电机的正反转控制,同时还能同时控制多个电机,实现机器人的多自由度自由移动。
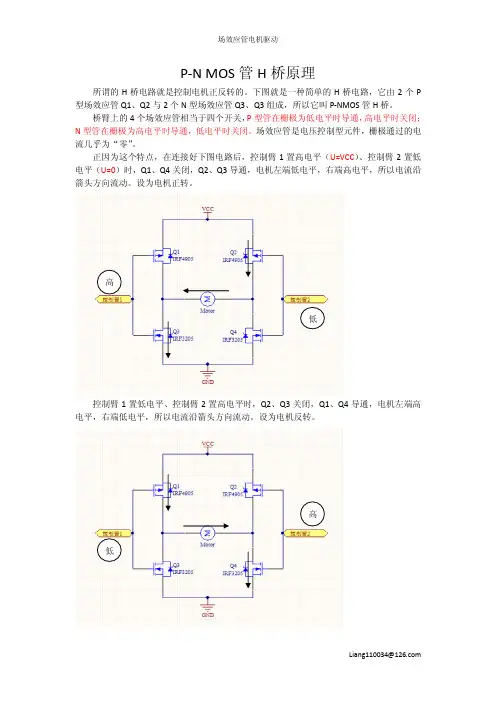
P-N MOS管H桥原理所谓的H桥电路就是控制电机正反转的。
下图就是一种简单的H桥电路,它由2个P 型场效应管Q1、Q2与2个N型场效应管Q3、Q3组成,所以它叫P-NMOS管H桥。
桥臂上的4个场效应管相当于四个开关,P型管在栅极为低电平时导通,高电平时关闭;N型管在栅极为高电平时导通,低电平时关闭。
场效应管是电压控制型元件,栅极通过的电流几乎为“零”。
正因为这个特点,在连接好下图电路后,控制臂1置高电平(U=VCC)、控制臂2置低电平(U=0)时,Q1、Q4关闭,Q2、Q3导通,电机左端低电平,右端高电平,所以电流沿箭头方向流动。
设为电机正转。
高低控制臂1置低电平、控制臂2置高电平时,Q2、Q3关闭,Q1、Q4导通,电机左端高电平,右端低电平,所以电流沿箭头方向流动。
设为电机反转。
高低Liang110034@当控制臂1、2均为低电平时,Q1、Q2导通,Q3、Q4关闭,电机两端均为高电平,电机不转;当控制臂1、2均为高电平时,Q1、Q2关闭,Q3、Q4导通,电机两端均为低电平,电机也不转,所以,此电路有一个优点就是无论控制臂状态如何(绝不允许悬空状态),H桥都不会出现“共态导通”(短路),很适合我们使用。
(另外还有4个N型场效应管的H桥,内阻更小,有“共态导通”现象,栅极驱动电路较复杂,或用专用驱动芯片,如MC33883,原理基本相似,不再赘述。
)下面是由与非门CD4011组成的栅极驱动电路,因为单片机输出电压为0~5V,而我们小车使用的H桥的控制臂需要0V或7.2V电压才能使场效应管完全导通,PWM输入0V或5V 时,栅极驱动电路输出电压为0V或7.2V,前提是CD4011电源电压为7.2V。
切记!!故CD4011仅做“电压放大”之用。
之所以用两级与非门是为了与MC33886兼容。
单片机0~5V 0~7.2V两者结合就是下面的电路:调试时两个PWM输入端其中一个接地,另一个悬空(上拉置1),电机转为正常。
单片机驱动h桥电路
H桥电路是一种常见的电路结构,用于驱动电机或执行器等设备。
它由四个开关元件组成,可以实现正反转控制。
单片机作为控制器,可以通过控制这四个开关元件的通断,来实现对电机的驱动控制。
在H桥电路中,有两对开关元件,分别是S1和S2,以及S3和S4。
当S1和S4闭合,S2和S3断开时,电流从电源正极流过电机,使电机正转。
当S2和S3闭合,S1和S4断开时,电流从电源负极流过电机,使电机反转。
通过控制这四个开关元件的状态,可以实现电机的正反转控制。
单片机通过输出高低电平控制H桥电路中的开关元件。
当输出高电平时,对应的开关元件闭合;当输出低电平时,对应的开关元件断开。
通过不同的输出组合,可以实现不同的控制功能。
除了正反转控制外,H桥电路还可以通过控制开关元件的通断时间,实现PWM调速功能。
PWM调速是通过改变开关元件通断时间的占空比,来控制电机的平均电压值,从而控制电机的转速。
通过单片机的定时器模块,可以轻松实现对PWM调速的控制。
需要注意的是,在控制H桥电路时,要注意避免出现开关元件同时闭合的情况,以免损坏电路或电机。
因此,在单片机程序设计中,需要合理设计控制逻辑,保证开关元件的状态互斥。
单片机驱动H桥电路是一种常见的控制方式,可以实现对电机的正
反转控制和PWM调速控制。
通过合理设计单片机程序,可以灵活控制H桥电路,满足不同应用场景的需求。
h桥驱动电路工作原理嗨,小伙伴!今天咱们来唠唠这个超有趣的H桥驱动电路的工作原理哈。
你可以把H桥驱动电路想象成一个超级交通枢纽,就像那种有好多条路可以走的大十字路口。
这个电路主要是用来控制电机的,不管是直流电机正转、反转还是刹车,它都能搞定呢。
咱先说说这个H桥的结构吧。
它长得就像一个字母“H”,所以才叫H桥。
这个“H”的四条“腿”呢,可都是很有讲究的。
每一条“腿”上都连接着一个电子元件,一般是晶体管之类的,就像每个路口都有一个小交警在指挥交通一样。
当我们想要电机正转的时候呀,就像是要让车朝着一个方向顺利行驶。
这时候呢,H桥的其中两个对角线上的元件就开始工作啦。
比如说左上角和右下角的元件就像是打开了绿灯,电流就从电源经过这两个元件,然后顺利地流到电机里面,电机就欢快地正转起来啦。
这个过程就好像是给电机注入了一股正能量,让它朝着我们期望的方向转动。
那要是想让电机反转呢?这就像让车掉头往回开。
这时候就轮到另外两个对角线的元件大显身手啦,也就是右上角和左下角的元件开始工作。
电流就会改变方向,从电源经过这两个元件再到电机,电机就会按照相反的方向转动起来。
是不是很神奇呢?就像这个电路有魔法一样,能轻松改变电机的转动方向。
还有刹车的情况呢。
这就好比是突然在路中间设置了一个大障碍物,让车停下来。
在H桥驱动电路里,要实现刹车,就是让电机的两端都接到电源或者地,这样电机就没有办法转动啦。
就像是电机突然被定住了一样,它想动也动不了咯。
这个H桥驱动电路在很多地方都超级有用呢。
比如说在那些小小的遥控汽车里面,就是靠这个电路来控制汽车前进、后退的。
还有那些电动小风扇,如果想要它能正反转来调节风向,也可以用到H桥驱动电路。
不过呢,这个电路也不是没有小脾气的。
在实际应用的时候呀,要特别注意元件的选择。
如果选的晶体管功率不够大,就像小交警没有足够的力气指挥交通一样,可能就没办法让电机正常工作啦。
而且呢,在切换电机正反转的时候,也要小心一点,就像车辆掉头的时候要注意周围的情况一样,要是切换得太快或者太突然,可能会对电路或者电机造成不好的影响呢。
H桥式驱动电路原理
H桥的原理可以通过一个简单的直流电机来说明。
假设一个直流电机
连接在H桥电路上,其中两个晶体管连接到电机的正极,另外两个晶体管
连接到电机的负极。
通过控制晶体管的导通和关断状态,可以实现电机的
正转和反转。
当控制电压输入到H桥电路的控制端口时,四个晶体管中的两个将被
打开,形成通路,允许电流在电机和电源之间流动。
这时,电机将开始旋转。
如果打开两个连接到电机正极的晶体管,同时关闭连接到电机负极的
晶体管,那么电流将从电源的正极流向电机,从而实现正转。
若打开连接
到电机负极的两个晶体管,同时关闭连接到电机正极的晶体管,那么电流
将从电机负极流向电源,实现反转。
H桥式驱动电路的另一个重要特点是能够实现电流的调制,从而控制
电机的速度。
通过改变晶体管的开启和关闭时间比例,可以改变电机的平
均功率,并实现电机的速度调节。
例如,在一个半周期内,如果打开时间
比关闭时间长,那么电机将以较高速度旋转;如果打开时间比关闭时间短,那么电机将以较低速度旋转。
通过调整这个比例,可以实现电机的精确速
度控制。
此外,H桥式驱动电路还具有过流保护功能。
当电流超过电路和电机
所能承受的最大值时,电路会自动切断电流,以保护电机和电路不受损坏。
这大大提高了电机的可靠性和使用寿命。
总之,H桥式驱动电路通过控制四个晶体管的导通和关断状态,实现
了直流电机的正转、反转和速度调节功能。
它被广泛应用于机器人、电动车、飞行器等领域。
H桥式电机驱动电路的工作原理H桥式电机驱动电路是一种常用于直流电机驱动的电路,可以控制电机的转向和转速。
这一电路主要由四个开关器件组成,通常使用MOSFET或IGBT作为开关器件,通过对这四个开关器件的控制,可以实现对电机的正转、反转、刹车等操作。
1.电源供电:电源的正负极分别接在H桥电路的两个“供电接口”上,以提供工作电压给电机驱动电路。
2.控制信号:通过对控制信号的控制,可以实现对电机的正转、反转和刹车功能。
控制信号通过控制信号输入端接入到电子控制系统,电子控制系统通过对控制信号进行处理,产生相应的控制信号。
3.开关管的控制:H桥式电机驱动电路中的四个开关器件可以分为上半桥和下半桥,每个半桥包含两个开关器件。
当上半桥的两个开关器件打开,下半桥的两个开关器件关闭时,电流从电源的正极出发,经过上半桥的开关管、电机,最终回到电源的负极,电机就会正转。
当上半桥的两个开关器件关闭,下半桥的两个开关器件打开时,电流则会从电源的负极出发,经过下半桥的开关管、电机,最终回到电源的正极,电机就会反转。
在控制信号的作用下,电子控制系统可以通过对开关器件的开关控制,来实现电机的转向控制。
4.PWM控制:为了实现电机的转速控制,通常采用PWM(脉宽调制)技术。
通过对开关管的开关频率和占空比进行调整,控制电机的平均电压大小,从而实现对电机转速的控制。
5.刹车功能:当需要刹车时,可以通过控制开关管的开关状态,将电机的两个端子短接在一起,产生刹车电压,使电机快速停止运动。
总结起来,H桥式电机驱动电路通过控制开关器件的开合状态,通过PWM技术控制电机的平均电压大小,从而实现对电机的转向和转速的精确控制。
这一电路在机器人、自动化设备、汽车行业等领域得到广泛应用。
h桥电路的工作原理
H桥电路是一种常用的电子电路,它可以实现直流电机(步进电机或直流电动机)的双向控制。
H桥电路由四个开关元件组成,通常为MOSFET或者集成了MOSFET的半导体器件。
H桥电路的工作原理如下:
1. 当S1和S4两个开关元件闭合,同时S2和S3两个开关元件断开时,电流从左侧电源Vcc流过电机,使电机正转。
2. 当S2和S3两个开关元件闭合,同时S1和S4两个开关元件断开时,电流从右侧电源Vcc流过电机,使电机反转。
3. 当S1和S2两个开关元件闭合,同时S3和S4两个开关元件断开时,电流通过电机内部的反电动势二极管,以短接的形式进行制动。
4. 当S3和S4两个开关元件闭合,同时S1和S2两个开关元件断开时,电流通过电机内部的反电动势二极管,以短接的形式进行制动。
通过不同的开关组合,H桥电路能够控制电机的正转、反转和停止。
此外,通过改变开关的开合顺序和频率,可以实现对电机的调速和调力。
需要注意的是,在切换开关状态时,应避免出现短暂的导通状态,即同时闭合S1和S4、或者同时闭合S2和S3,以免造成
电流短路和损坏开关元件。
因此,在实际应用中,通常会通过控制电路和驱动芯片来实现对H桥电路的控制,保证开关的合理切换。
H桥驱动PWM控制原理
H桥驱动PWM控制原理是:通过对H桥输出通道的比较,产生一个四路PWM 脉冲信号,实现对电机的正反转、PWM的占空比调节。
H桥由四极管组成,各极管的正向和反向负载可以通过控制PWM比较器的输出来实现,从而实现电机的转动。
无论正转或反转,周期与占空比等控制参数都可以根据需要更改,实现运行参数的微调。
桥式输出PWM是指使用晶体管作为开关元件,控制PWM脉冲输出,调节电机转速或调节控制装置中其他电路。
脉冲信号在正反转间按照占空比进行切换。
H桥使得电气机械易控,实现了功率恒定环节控制,提高了可靠性和速度精度。
PWM控制通过不同的占空比,调节电机转速和力矩,达到控制的目的。
使用这种PWM控制方式,可以更准确的控制电机,提高可靠性和提高操作精度。
一文读懂 H 桥式驱动电路【导读】图1 中所示为一个典型的直流电机控制电路。
电路得名于“H 桥式驱动电路”是因为它的形状酷似字母H。
4 个三极管组成H 的4 条垂直腿,而电机就是H 中的横杠(注意:图1 及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
一、H 桥原理图1 中所示为一个典型的直流电机控制电路。
电路得名于“H 桥式驱动电路”是因为它的形状酷似字母H。
4 个三极管组成H 的4 条垂直腿,而电机就是H 中的横杠(注意:图1 及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H 桥式电机驱动电路包括4 个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图1 H 桥式电机驱动电路要使电机运转,必须使对角线上的一对三极管导通。
例如,如图2 所示,当Q1 管和Q4 管导通时,电流就从电源正极经Q1 从左至右穿过电机,然后再经Q4 回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1 和Q4 导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图2 H 桥电路驱动电机顺时针转动图3 所示为另一对三极管Q2 和Q3 导通的情况,电流将从右至左流过电机。
当三极管Q2 和Q3 导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图3 H 桥电路驱动电机逆时针转动二、使能控制和方向逻辑驱动电机时,保证H 桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1 和Q2 同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
pwm互补输出驱动h桥原理今天咱们来唠唠这个PWM互补输出驱动H桥的原理,可有趣啦。
咱先得知道啥是H桥。
你看啊,这个H桥就像一座很特别的桥,它有四个“桥墩”,其实就是四个电子元件,像MOS管或者晶体管啥的。
这四个元件两两一组,分别在桥的两边。
这个H桥的作用可大啦,它就像是一个超级开关,可以控制电流的流向,让电机正转或者反转,就像指挥交通一样,让车辆(电流)向左走或者向右走。
那PWM又是啥呢?PWM就是脉冲宽度调制啦。
你可以把它想象成是一个调皮的小鼓手。
这个小鼓手敲鼓的节奏很特别,它不是一直敲,而是一会儿敲得长(高电平),一会儿敲得短(低电平)。
这个敲鼓时长和短的比例就很关键啦。
比如说,敲长的时间多,那平均下来就好像是一直在用力敲鼓;敲短的时间多,平均下来就像是轻轻敲鼓。
这个就对应着PWM的占空比。
现在把PWM和H桥联系起来。
当我们用PWM互补输出去驱动H桥的时候,就像是给H桥这个大机器注入了有节奏的能量。
比如说,我们想要电机正转。
那我们的PWM 互补输出就会让H桥一边的一对元件按照一定的节奏导通和关闭,另一边的一对元件也按照互补的节奏来。
就好像是两个人在配合跳舞,一个向左迈一步的时候,另一个就向右迈一步。
这样电流就会按照我们想要的方向通过电机,电机就欢快地正转起来啦。
再讲讲这个互补是啥意思呢。
就像是两个小伙伴,一个在干活的时候,另一个就休息,然后交替着来。
对于PWM互补输出来说,一个输出高电平的时候,另一个就输出低电平,这样就保证了在任何时刻,H桥都能正常工作,不会出现混乱的情况。
你想啊,如果没有这种PWM互补输出的巧妙控制,H桥可能就像一个没有指挥的乐队,大家都乱弹琴。
有了PWM互补输出,就像是有了一个超级棒的指挥,每个乐手(电子元件)都知道啥时候该演奏(导通),啥时候该安静(关闭)。
而且啊,通过改变PWM的占空比,我们还能控制电机的速度呢。
就像那个小鼓手改变敲鼓的节奏,电机就会跟着这个节奏调整自己的转动速度。
一种基于四个三极管的H桥双向电机驱动电路一种基于四个三极管的H桥双向电机驱动电路引言:电机作为现代工业中常用的动力设备,广泛应用于各个领域。
为了实现电机的双向控制,H桥电路成为一种常见的电机驱动电路。
本文将介绍一种基于四个三极管的H桥双向电机驱动电路的原理和工作方式。
一、H桥电路的基本原理H桥电路是一种能够实现电机正反转的电路。
它由四个开关组成,分别为Q1、Q2、Q3和Q4。
其中Q1和Q4被称为上半桥,Q2和Q3被称为下半桥。
当Q1和Q4导通,Q2和Q3断开时,电流从电源正极流入电机,电机正转;当Q1和Q4断开,Q2和Q3导通时,电流从电机流回电源,电机反转。
二、基于四个三极管的H桥电路本文所介绍的H桥电路采用四个三极管来实现电机的正反转。
这四个三极管分别为Q1、Q2、Q3和Q4,它们的工作原理如下:1. Q1和Q4为NPN型三极管,Q2和Q3为PNP型三极管。
2. 当Q1导通,Q4断开时,电流从电源正极流入电机,电机正转。
3. 当Q1断开,Q4导通时,电流从电机流回电源,电机反转。
4. Q2和Q3的导通与断开与Q1和Q4相反,通过控制Q2和Q3的导通与断开状态,可以实现电机的正反转。
三、工作原理1. 当需要使电机正转时,控制Q1和Q3导通,Q2和Q4断开。
此时电流从电源正极流入电机,电机正转。
2. 当需要使电机反转时,控制Q2和Q4导通,Q1和Q3断开。
此时电流从电机流回电源,电机反转。
3. 当需要刹车时,控制Q1、Q2、Q3和Q4均断开。
此时电机断电刹车。
四、电路设计与实现1. 对于Q1和Q4,输入信号为高电平时导通,为低电平时断开。
2. 对于Q2和Q3,输入信号为低电平时导通,为高电平时断开。
3. 输入信号可以通过微控制器或其他逻辑门电路来控制。
五、总结本文介绍了一种基于四个三极管的H桥双向电机驱动电路。
通过控制四个三极管的导通与断开状态,可以实现电机的正反转和刹车功能。
该电路设计简单,实现方便,适用于各种电机控制场合。
H桥驱动电路原理时间:2007-08-07 来源:机器人探索作者: 点击: 18260 字体大小:【大中小】一、H桥驱动电路图4.12中所示为一个典型的直流电机控制电路。
电路得名于“H桥驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图4.12 H桥驱动电路要使电机运转,必须使对角线上的一对三极管导通。
例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图4.14 H桥驱动电机逆时针转动二、使能控制和方向逻辑驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图4.155 所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。
H桥驱动电路分析
图中所示为一个典型的直流电机控制电路。
电路得名于“H桥驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
H桥电路驱动原理
2009年04月08日 星期三 上午 08:43
H桥电路驱动原理
一、H桥驱动电路
图4.12中所示为一个典型的直流电机控制电路。
电路得名于“H桥驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图4.12 H桥驱动电路
要使电机运转,必须使对角线上的一对三极管导通。
例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经 Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向 转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动
图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图4.14 H桥驱动电机逆时针转动
二、使能控制和方向逻辑
驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电 路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常 要用硬件电路方便地控制三极管的开关。
图4.155 所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制 整个电路的开关。
而2个非门通过
提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。
(与本节前面的示意图一样,图4.15所示 也不是一个完整的电路图,特别是图中与门和三极管直接连接是不能正常工作的。
)
图4.15 具有使能控制和方向逻辑的H桥电路
采用以上方法,电机的运转就只需要用三个信号控制:两个方向信号和一个使能信号。
如果DIR-L信号为0,DIR-R信号为1,并且使能信号是1,那么三 极管Q1和Q4导通,电流从左至右流经电机(如图4.16所示);如果DIR-L信号变为1,而DIR-R信号变为0,那么Q2和Q3将导通,电流则反向 流过电机。
图4.16 使能信号与方向信号的使用
实际使用的时候,用分立元件制作H桥是很麻烦的,好在现在市面上有很多封装好的H桥集成电路,接上电源、电机和控制信号就可以使用了,在额定的电压和电流内使用非常方便可靠。
比如常用的L293D、L298N、TA7257P、SN754410等。
附两张分立元件的H桥驱动电路:。