斐波那契法 一维搜索方法
- 格式:doc
- 大小:184.50 KB
- 文档页数:3
运筹学_北京科技大学中国大学mooc课后章节答案期末考试题库2023年1.将产销不平衡运输问题化为平衡运输问题,可虚设一产地和一销地,并令其相应运价为()参考答案:2.单纯形法需要解决的三个问题不包括()参考答案:遍历所有顶点3.标准形中不需要必须满足的条件是()参考答案:目标函数求最大4.互为对偶的两个线性规划的解存在关系()参考答案:原问题具有无界解,则对偶问题无可行解5.以下关于目标规划模型的说法是否正确:要求不超过目标值的目标函数是【图片】参考答案:错误6.在产销平衡运输问题中,设产地为m个,销地为n个,则利用表上作业法求解时最优解中基变量个数为()参考答案:m+n-17.割平面法中,引入松弛变量前,必须()参考答案:将约束条件各变量前的系数和右端项化为整数8.单纯形表的检验数行通常不含有()参考答案:目标函数值9.图解法的求解过程不包括()参考答案:计算目标函数在各可行点处的值10.运输问题的求解结果中不可能出现()参考答案:无可行解11.以下说法是否正确:目标规划单纯形法中优先因子【图片】可理解为负常数。
参考答案:错误12.闭回路的边都是()参考答案:水平或垂直13.表上作业法的初始方案均为()参考答案:可行解14.以下说法是否正确:背包问题可建模成整数规划问题。
参考答案:正确15.以下说法是否正确:投资分配问题只能用动态规划方法求解。
参考答案:错误16.在表上作业法求解运输问题过程中,非基变量的检验数()参考答案:以上三种均有可能17.以下关于二次函数的共轭梯度法的说法,错误的是()参考答案:共轭梯度法的相邻两次迭代的搜索方向相互垂直.18.设Q是n阶对称正定矩阵,以下关于Q共轭方向的表述,正确的是()参考答案:共轭方向法具有二次终止性.19.以下关于最速下降法的表述,错误的是()参考答案:最速下降法是求解无约束优化问题的最快的方法.20.单纯形法中的最小非负比是指()参考答案:右端常数项和进基列正数比的最小值21.标准形的矩阵形式中,A表示()参考答案:约束条件中的系数矩阵22.已知线性规划标准形中的系数矩阵A为【图片】,对应的变量分别为x1,x2,...,x5,则基矩阵【图片】对应的基变量是()参考答案:x2,x323.已知线性规划标准形中的系数矩阵A为【图片】,对应的变量分别为x1,x2,...,x5,则下面解中一定不是基本可行解的是()参考答案:(1, 1, -2, 0, 0)24.单纯形法中,基变量的检验数()参考答案:等于025.将线性规划的数学模型化为标准形的主要目的是()参考答案:使用单纯形法求解26.两阶段法中第二阶段的初始单纯形表如何得到()参考答案:删除第一阶段最优表中的人工列_用公式补充各变量的检验数_删除第一阶段最优表中的检验数行27.线性规划极小化问题达到最优解时()参考答案:所有检验数都非负28.求解总产量小于总销量的运输问题,为构造产销平衡表,其正确的做法是()参考答案:虚设一产地29.用分枝定界法求解整数规划问题,如果某分枝伴随规划的最优解是整数解,则()参考答案:该分枝不需要再分枝30.判断该说法是否正确:若算法具有二次终止性,则算法必经有限步迭代收敛于目标函数的最优解。
fibonacci法的算法步骤Fibonacci法是一种基于斐波那契数列的搜索算法,可以用于解决一些优化问题,例如最小化费用的路径问题。
本文将介绍Fibonacci法的算法步骤。
一、斐波那契数列在介绍Fibonacci法之前,我们先来了解一下斐波那契数列。
斐波那契数列是一个以0和1开始,后面每一项都等于前两项之和的数列,如下所示:0, 1, 1, 2, 3, 5, 8, 13, 21, ...二、Fibonacci堆Fibonacci堆是一个基于斐波那契数列的数据结构,它具有以下特点:1. 每个节点有一个指向其父节点、左兄弟节点、右兄弟节点、子节点中最小节点的指针。
2. 每个节点还有一个度数表示其子树中包含多少个子节点。
3. 所有根节点构成一个双向循环链表。
4. 堆中包含最小值节点指针。
三、Fibonacci法算法步骤1. 初始化:创建一个空堆,并将所有顶点加入堆中。
2. 循环直到堆为空或者找到目标顶点:(1)从堆中取出最小值顶点。
(2)如果该顶点是目标顶点,则结束循环。
(3)否则,将该顶点从堆中删除,并将其所有邻居的距离更新为“当前距离+边权”。
(4)对于每个邻居节点,如果其不在堆中,则将其加入堆中;否则,更新堆中该节点的值。
3. 返回结果:如果找到了目标顶点,则返回从起始顶点到目标顶点的最小距离;否则,返回无穷大。
四、Fibonacci法的优缺点1. 优点:(1)相比于Dijkstra算法和A*算法,Fibonacci法具有更快的运行速度和更低的空间复杂度。
(2)Fibonacci堆可以在常数时间内合并两个堆,因此可以用于处理动态图问题。
2. 缺点:(1)由于Fibonacci堆包含大量指针和链表操作,因此实现相对复杂。
(2)在稠密图上运行时,Fibonacci法可能会比Dijkstra算法慢。

常用一维搜索算法常用一维算法一维算法是解决一维问题的常用方法。
一维算法主要通过在一维数据集中查找目标元素来解决问题。
以下是一些常用的一维算法:1. 线性(Linear Search):线性算法是一种最简单的算法,也是最基本的一维算法。
它从头到尾依次检查数据集中的每个元素,直到找到目标元素或遍历完整个数据集。
线性算法的时间复杂度为O(n)。
2. 二分(Binary Search):二分算法是一种高效的算法,但它要求数据集必须是有序的。
算法通过将数据集分成两半,并与目标元素进行比较,从而确定目标元素在哪个半部分中。
然后,它将重复这个过程,直到找到目标元素或数据集被划分为一个元素。
二分算法的时间复杂度为O(log n)。
3. 插值(Interpolation Search):插值算法是改进的二分算法,它根据目标元素与数据集中元素的相对位置来确定的起始位置。
它使用目标元素与数据集首尾元素之间的比例来估计目标元素的位置。
插值算法在数据集分布均匀的情况下具有较好的性能。
4. 斐波那契(Fibonacci Search):斐波那契算法基于斐波那契数列来确定的起始位置。
它通过比较目标元素与斐波那契数列中的元素来确定的范围,并将数据集划分成两部分。
然后,它在适当的部分中重复这个过程,直到找到目标元素。
斐波那契算法的时间复杂度为O(log n)。
5. 插入(Interpolation Search):插入算法是一种改进的线性算法,它使用了数据集中元素的顺序信息来提高效率。
与线性算法一样,它从头到尾依次检查数据集中的每个元素,但是当元素不满足条件时,它会根据元素的顺序信息来确定的方向,从而减少的次数。
6. 哈希(Hash Search):哈希算法使用哈希函数将数据集中的元素映射到哈希表中的索引。
然后,它通过查找哈希表中的索引来确定目标元素的位置。
哈希算法通常具有很高的效率,但是它需要额外的内存空间来存储哈希表。
上述算法是一维问题的常用解决方法。
无约束优化:不对定义域或值域做任何限制的情况下,求解目标函数的最小值。
这是因为实际应用中,许多情形被抽象为函数形式后均为凸函数,对于凸函数来说局部最小值点即为全局最小值点,因此只要能求得这类函数的一个最小值点,该点一定为全局最小值。
(直接法:又称数值方法,它只需计算目标函数驻点的函数数值,而不是求其倒数,如坐标轮换法,单纯型法等。
间接法:又称解析法,是应用数学极值理论的解析方法。
首先计算出目标函数的一阶或一阶、二阶导数,然后根据梯度及海赛矩阵提供的信息,构造何种算法,从而间接地求出目标函数的最优解,如牛顿法、最速下降法共轭梯度法及变尺度法。
)在优化算法中保证整体收敛的重要方法就是线搜索法与信赖域法,这两种算法既相似又有所不同。
根据不同的线搜索准则就延伸出不同的线搜索算法,譬如比较常见和经典的最速下降法,牛顿法,拟牛顿法以及共辄梯度法等。
一维搜索又称线性搜索(Line Search),就是指单变量函数的最优化,它是多变量函数最优化的基础,是求解无约束非线性规划问题的基本方法之一。
一维搜索技术既可独立的用于求解单变量最优化问题,同时又是求解多变量最优化问题常用的手段,虽然求解单变量最优化问题相对比较简单,但其中也贯穿了求解最优化问题的基本思想。
由于一维搜索的使用频率较高,因此努力提高求解单变量问题算法的计算效率具有重要的实际意义。
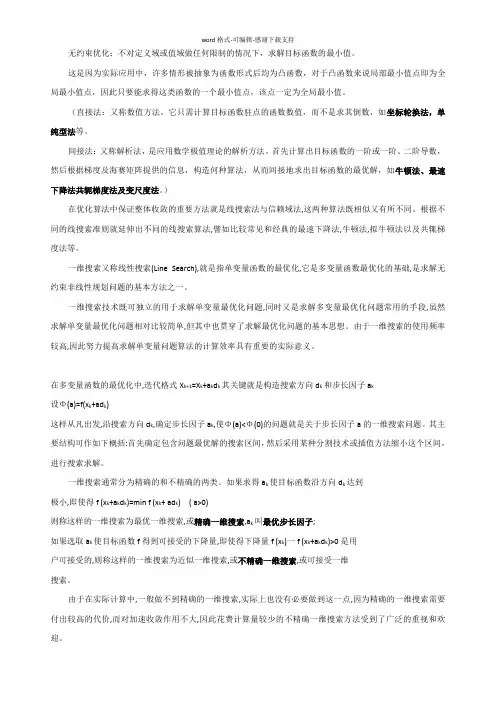
在多变量函数的最优化中,迭代格式X k+1=X k+a k d k其关键就是构造搜索方向d k和步长因子a k设Φ(a)=f(x k+ad k)这样从凡出发,沿搜索方向d k,确定步长因子a k,使Φ(a)<Φ(0)的问题就是关于步长因子a的一维搜索问题。
其主要结构可作如下概括:首先确定包含问题最优解的搜索区间,然后采用某种分割技术或插值方法缩小这个区间,进行搜索求解。
一维搜索通常分为精确的和不精确的两类。
如果求得a k使目标函数沿方向d k达到极小,即使得f (x k+a k d k)=min f (x k+ ad k) ( a>0)则称这样的一维搜索为最优一维搜索,或精确一维搜索,a k叫最优步长因子;如果选取a k使目标函数f得到可接受的下降量,即使得下降量f (x k)一f (x k+a k d k)>0是用户可接受的,则称这样的一维搜索为近似一维搜索,或不精确一维搜索,或可接受一维搜索。
斐波那契哈希最优算法斐波那契哈希(Fibonacci hash)是一种哈希算法,它使用斐波那契数列的性质来减少哈希冲突的可能性,并提高哈希表的性能。
在斐波那契哈希算法中,使用一个无序的斐波那契数列作为哈希表的容量,在插入元素时将元素哈希到最接近斐波那契数的位置上。
首先,我们需要了解什么是斐波那契数列。
斐波那契数列是指从0和1开始,后面的每一项都是前两项的和。
斐波那契数列的前几项为0,1,1,2,3,5,8,13,21,34,……1.初始化斐波那契数列:由于哈希表的容量是无序的斐波那契数列,我们需要找到最接近并且小于要求容量的斐波那契数列项。
2.插入元素:将元素哈希到距离目标位置最近的斐波那契数位置上。
具体来说,可以通过计算元素的哈希值与斐波那契数的差值的绝对值,找到离目标位置最近的斐波那契数。
3.处理冲突:如果目标位置上已经有元素存在,我们可以使用线性探测或者二次探测等方式来解决冲突。
4.动态扩容:当哈希表中元素的数量达到斐波那契数列中的下一个数值时,需要进行扩容操作,重新计算斐波那契数列。
5.删除元素:删除元素的操作与插入操作类似,只是需要将目标位置上的元素标记为删除状态,而不是实际移除。
利用斐波那契哈希算法,可以有效减少哈希冲突的可能性,提高了哈希表的性能。
然而,斐波那契哈希算法的主要缺点是插入和删除操作的时间复杂度为O(n),其中n是斐波那契数列中的位置,因此在一些对插入和删除操作非常敏感的场景中,斐波那契哈希算法可能不适用。
需要提醒的是,斐波那契哈希算法虽然在一定程度上减少了哈希冲突的发生,但并不能完全避免冲突。
在实际使用中,需要根据具体的场景和需求来选择合适的哈希算法,以达到最佳的性能和效果。
总结起来,斐波那契哈希算法是一种利用斐波那契数列作为哈希表容量的方法,以减少哈希冲突并提高哈希表性能的算法。
该算法的核心思想是使用斐波那契数列的无序性和间隔较大的特点,将元素哈希到距离最近的斐波那契数位置上。
斐波那契查找算法详解斐波那契查找算法详解说明1. 斐波那契查找算法核⼼思想类似于⼆分查找和插值查找,区别在于对标志值,即 mid 的设计算法不⼀样,⼆分查找直接重⽤中间值作为标杆,插值查找使⽤⾃适应确定mid,⽽斐波那契查找算法则使⽤黄⾦分割,使得mid总是处于查找数列的黄⾦分割点位置2. 因为斐波那契数列越到后边,相邻两数的⽐值越发接近0.618,也就是黄⾦分割⽐,因为可以巧妙的使⽤斐波那契数列寻找数组中的黄⾦分割点,即mid对应的下标3. 因此需要先构建⼀个斐波那契数列,可以使⽤递归的⽅法或者⾮递归的⽅式4. 使⽤斐波那契数列寻找数组的黄⾦分割点公式为: mid = low + f (k - 1) - 1,k为当前斐波那契数对应的索引5. 使⽤斐波那契数列查找,需要先将当前数组的长度构建为第⼀个⽐数组长度⼤的斐波那契数,这个数对应的索引就是 k ,可以使⽤循环的⽅法6. 将构建的新数组后边补零的位置替换为数组中的最后⼀个位置,即最⼤值7. 准备⼯作准备好后,就可以计算当前数组的黄⾦分割值,然后获取到当前黄⾦分割值对应的元素8. 将这个元素和要查找的元素进⾏⽐较,然后重置左右指针和重置后数组对应的黄⾦分割点9. 当查找完所有的元素后,如果没有找到,则返回 - 110. 注意斐波那契数列的特性即当索引 > 2时,当前位置元素 = 前两个位置元素之和,⽽前两个位置元素之⽐刚好是满⾜黄⾦分割,正是基于这样的特性,才有公式 mid = low + f (k - 1) - 111. 斐波那契查找算法不易理解,须慢慢体会12. 源码及详解见下源码及分析//斐波那契数列的最⼤长度public static int maxSize = 20;public static void main(String[] args) {int[] arr = {1, 23, 45, 66, 67, 88, 90, 100};int index = fisSearch(arr, 88);System.out.println("index = " +index);}//构建斐波那契数列public static int[] fis() {int[] f = new int[maxSize];f[0] = 1;f[1] = 1;for (int i = 2; i < f.length; i++) {f[i] = f[i - 1] + f[i - 2];}return f;}/*** 斐波那契查找算法实现** @param arr 要查找的原始数组* @param key 要查找的值* @return 查找的结果*/public static int fisSearch(int[] arr, int key) {//数组左侧索引int low = 0;//数组右侧索引int high = arr.length - 1;//⽐右侧索引⼤的第⼀个斐波那契数对应的索引int k = 0;//黄⾦分割点int mid = 0;//斐波那契数列int[] f = fis();//由数组最⼤值计算kwhile (high > f[k] - 1) {k++;}//因为f[k]的值可能⼤于数组的长度,因此需要给原数组扩容到长度 == f(k)int[] tmp = Arrays.copyOf(arr, f[k]);//调⽤copyOf⽅法后在扩容部分全部补了0,实际上需要补数组的最后⼀位for (int i = high + 1; i < tmp.length; i++) {tmp[i] = arr[high];}//使⽤while循环来查找需要找的数while (low <= high) {//先计算黄⾦分割点mid = low + f[k - 1] - 1;//判断黄⾦分割点的元素和要查找的元素的关系 //如果要查找的值在mid左边,重置high和kif (tmp[mid] > key){high = mid - 1;k--;//如果要查找的值在mid右边}else if (tmp[mid] < key){low = mid + 1;k -= 2;//否则找到该元素}else {if (mid <= high){return mid;}else {return high;}}}//如果循环结束后还没有找到,说明没有return -1;}。
一维数组是一种常见的数据结构,它可以用来存储一组有序的数据。
在计算机编程领域,一维数组通常被用来表示一系列的数值或者其他类型的数据。
本文将介绍如何利用一维数组来计算斐波那契数列的前20项。
斐波那契数列是由意大利数学家斐波那契在13世纪提出的一个数列,它的定义如下:数列的第一项和第二项都是1,从第三项开始,每一项都是前两项的和。
即F(1)=1,F(2)=1,F(n)=F(n-1)+F(n-2),其中n>2。
计算斐波那契数列的前20项可以用多种方法,其中一种方法是利用一维数组来存储数列的每一项。
下面将介绍如何使用一维数组来计算斐波那契数列的前20项。
1. 创建一个长度为20的一维数组fibonacci,用来存储斐波那契数列的前20项。
数组的第一个和第二个元素分别赋值为1,表示数列的前两项。
2. 使用一个循环来计算数列的后18个项。
在每一次循环中,将数组的第i个元素赋值为数组的第i-1个元素和第i-2个元素的和。
具体的代码如下所示:```int fibonacci[20];fibonacci[0] = 1;fibonacci[1] = 1;for (int i = 2; i < 20; i++) {fibonacci[i] = fibonacci[i-1] + fibonacci[i-2];}```3. 完成上述步骤后,数组fibonacci中存储的就是斐波那契数列的前20项。
可以将数组的内容打印出来,以验证计算的正确性。
以下是打印数组内容的代码:```for (int i = 0; i < 20; i++) {cout << fibonacci[i] << " ";}```通过上述方法,我们成功利用一维数组计算出了斐波那契数列的前20项。
这种方法的优点是简单易懂,代码量少,而且计算效率高。
一维数组的存储结构也符合斐波那契数列的定义,因此很适合用来存储数列的每一项。
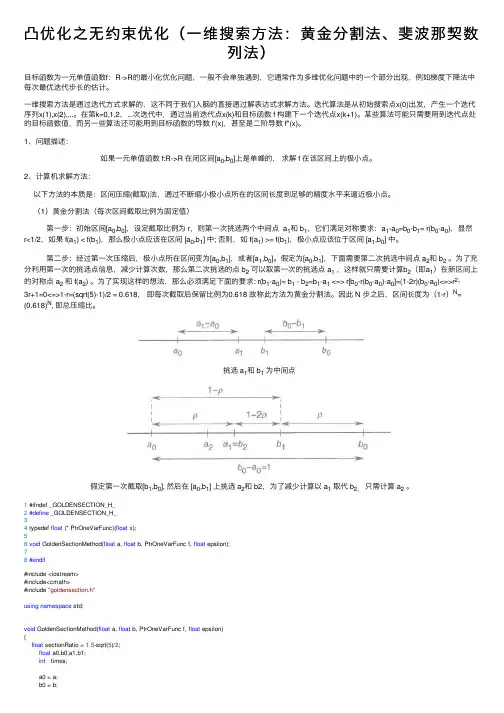
凸优化之⽆约束优化(⼀维搜索⽅法:黄⾦分割法、斐波那契数列法)⽬标函数为⼀元单值函数f:R->R的最⼩化优化问题,⼀般不会单独遇到,它通常作为多维优化问题中的⼀个部分出现,例如梯度下降法中每次最优迭代步长的估计。
⼀维搜索⽅法是通过迭代⽅式求解的,这不同于我们⼈脑的直接通过解表达式求解⽅法。
迭代算法是从初始搜索点x(0)出发,产⽣⼀个迭代序列x(1),x(2),...。
在第k=0,1,2,...次迭代中,通过当前迭代点x(k)和⽬标函数 f 构建下⼀个迭代点x(k+1)。
某些算法可能只需要⽤到迭代点处的⽬标函数值,⽽另⼀些算法还可能⽤到⽬标函数的导数 f'(x),甚⾄是⼆阶导数 f''(x)。
1、问题描述:如果⼀元单值函数 f:R->R 在闭区间[a0,b0]上是单峰的,求解 f 在该区间上的极⼩点。
2、计算机求解⽅法:以下⽅法的本质是:区间压缩(截取)法,通过不断缩⼩极⼩点所在的区间长度到⾜够的精度⽔平来逼近极⼩点。
(1)黄⾦分割法(每次区间截取⽐例为固定值)第⼀步:初始区间[a0,b0],设定截取⽐例为 r,则第⼀次挑选两个中间点 a1和 b1,它们满⾜对称要求:a1-a0=b0-b1= r(b0-a0),显然r<1/2,如果 f(a1) < f(b1),那么极⼩点应该在区间 [a0,b1] 中; 否则,如 f(a1) >= f(b1),极⼩点应该位于区间 [a1,b0] 中。
第⼆步:经过第⼀次压缩后,极⼩点所在区间变为[a0,b1],或者[a1,b0]。
假定为[a0,b1],下⾯需要第⼆次挑选中间点 a2和 b2 。
为了充分利⽤第⼀次的挑选点信息,减少计算次数,那么第⼆次挑选的点 b2可以取第⼀次的挑选点 a1,这样就只需要计算b2(即a1)在新区间上的对称点 a2 和 f(a2) 。
为了实现这样的想法,那么必须满⾜下⾯的要求: r(b1-a0)= b1 - b2=b1-a1 <=> r[b0-r(b0-a0)-a0]=(1-2r)(b0-a0)<=>r2-3r+1=0<=>1-r=(sqrt(5)-1)/2 = 0.618,即每次截取后保留⽐例为0.618 故称此⽅法为黄⾦分割法。
斐波那契应用技巧
斐波那契应用技巧是指将斐波那契数列应用到某些领域中,以解决一
些特定的问题。
它常常可以用来解决递归问题,也可以用来实现排列组合,有时也可以用来实现动态规划问题,它甚至可以用来解决一些棘手的图论
问题。
例如,斐波那契序列在灯泡问题中,可以用来更快地寻找灯泡状态。
动态规划也使用斐波那契数列,例如有关斐波那契图的算法。
此外,斐波
那契数列也可用于计算括号表达式的值,或者用于求解最长公共子序列的
问题。
斐波那契技术有许多其他的应用,包括计算离散数学,搜索引擎算法,语言模式匹配,以及分析文本等任务。
它也可以应用于数据压缩,以及网
络和编程中的状态机算法。
1《机械优化设计》课程作业(2014至2015学年度第2学期)第二节搜索区间的确定与区间消去法原理欲求一元函数f(ɑ)极小点α∗(为书写方便,这里仍用同一符号f表示相应的一元函数),必须先确定α∗所在的区间。
一、确定搜索区间的外推法在一维搜索时,假设函数f(ɑ)具有如图3-1所示的单谷性,即在所考虑的区间内部,函数f(ɑ)有唯一的极小点α∗。
为了确定极小点α∗所在的区间[a,b],应使函数f(ɑ)在区间[a,b]里形成“高—低—高”趋势。
为此,从ɑ=0开始,以初始步长h0向前试探。
如果函数值上升,则步长变号,即改变试探方向;如果函数值下降,则维持原来的试探方向,并将步长加倍。
区间的始点、中间点依次沿试探方向移动一步。
此过程一直进行到函数值再次上升时为止,即可找到搜索区间的终点。
最后得到的三点即为搜索区间的始点、中间点和终点,形成函数值的“高—低—高”趋势。
图3-2表示沿ɑ的正向试探。
每走一步都将区间的始点、中间点沿试探方向移动一步(进行换名)。
经过三步,最后确定搜索区间[α1,α3]并且得到区间始点、中间点和终点α1<α2<α3对应的函数值y1>y2<y3。
图3-3所示的情况是,开始沿ɑ的正方向试探,但由于函数值上升面改变了试探方向,最后得到始点、中间点和终点α1>α2>α3及它们的对应函数值y1>y2<y3,从而形成单谷区间[α3,α1]为一维搜索区间。
上诉确定搜索区间的外推法,其程序框图如图3-4所示。
二、区间消去法原理搜索区间[a,b]确定之后,采用区间消去法逐步缩短搜索区间,从而找到极小点的数值近似解。
假定在搜索区间[a,b]内任取两点a1、b1,且a1<b1,并计算函数值f(a1)、f(b1)。
于是可能有下列三种情况:1)f(a1)<f(b1),如图3-5a所示。
由于函数为单谷,所以极小点必在区间[a, b1]内,2)f(a1)>f(b1),如图3-5b所示。
一、介绍斐波那契查找算法斐波那契查找算法也被称为黄金分割查找算法,是一种利用斐波那契数列进行查找的方式。
与二分查找不同的是,斐波那契查找算法将待查找数组分成了两段长度分别为斐波那契数列中的两个相邻数的位置。
通过斐波那契数列的特点,能够使得待查找数组的长度接近黄金分割点,从而提高查找效率。
二、斐波那契数列及其特点斐波那契数列是指从0和1开始,后面的每一项都等于前两项之和。
其前几个数依次为0, 1, 1, 2, 3, 5, 8, 13, 21, 34, ...依此类推。
斐波那契数列的特点是,后一项与前一项的比值逐渐趋近于黄金分割数0.618。
三、斐波那契查找算法的实现思路1. 需要找到一个斐波那契数列中大于等于待查找数组长度的最小值,并将数组扩展至该长度。
2. 通过循环迭代的方式利用斐波那契数列的性质来分割数组,不断逼近待查找元素的位置。
3. 根据比较结果找到待查找元素的位置。
四、斐波那契查找算法的Java实现下面给出斐波那契查找算法的Java实现代码:```Javapublic class FibonacciSearch {public static int fibonacciSearch(int[] arr, int key){// 获取斐波那契数列int[] f = getFibonacci();int k = 0;int low = 0;int high = arr.length - 1;while(arr.length > f[k] - 1){k++;}// 将待查找数组扩展至斐波那契数列中大于等于其长度的最小值 int[] temp = new int[f[k] - 1];System.arraycopy(arr, 0, temp, 0, arr.length);for(int i = arr.length; i < temp.length; i++){temp[i] = arr[high];}// 利用斐波那契数列划分数组并查找while(low <= high){int mid = low + f[k - 1] - 1;if(key < temp[mid]){high = mid - 1;k -= 1;} else if(key > temp[mid]){low = mid + 1;k -= 2;} else{if(mid <= high){return mid;} else{return high;}}}return -1;}// 获取斐波那契数列private static int[] getFibonacci(){ int[] f = new int[50];f[0] = 1;f[1] = 1;for(int i = 2; i < 50; i++){f[i] = f[i - 1] + f[i - 2];}return f;}public static void m本人n(String[] args){int[] arr = {1, 3, 5, 7, 9, 11, 13, 15, 17, 19, 21};int key = 13;int index = fibonacciSearch(arr, key);System.out.println("元素" + key + "的下标为" + index);}}```五、实例分析以待查找数组为{1, 3, 5, 7, 9, 11, 13, 15, 17, 19, 21},待查找元素为13为例,利用上述的斐波那契查找算法,进行查找,可以得到元素13的下标为6。
斐波那契法
斐波那契法(Fibonacci Method)是一种古老的数学方法,它是由意大利数学家莱昂纳多·斐波那契发现的。
斐波那契法的重要性在于它能够帮助科学家和工程师在解决复杂问题的时候获得一个近似解,它主要是用来生成一系列数值,通过公式将这些数值拼接在一起,可以解决一些复杂的问题。
斐波那契法的核心思想是:每个数字都是前两个数字之和,也就是:第n个数字是由第n-1个数字与第n-2个数字的和组成。
斐波那契数列的第一个和第二个数字分别是0和1,从第三个开始每个数字都是前两个数字的和,例如:1、1、2、3、5、8、13、21、34等。
斐波那契法的应用非常广泛,主要应用于找出数学中的最优解,比如最佳表现值,最小误差等。
它可以用来解决大多数数学问题,比如最短路径问题、最小生成树问题、凸包问题(Convex Hull)等。
此外,斐波那契法还能够帮助算法设计者和系统分析师迅速找到最优解,从而大大提高工作效率,节省工作时间。
斐波那契法是一种非常有效的方法,可以快速找到最优解,节省人力和时间成本,提高工作效率,是一种极好的数学方法。
- 1 -。
斐波那契数列在数据结构中的应用
斐波那契数列是一种数学定义的递推公式,它的每一个项都是前两
项之和,起始的两个数字是0和1。
斐波那契数列在数据结构中的应用
已经有很多,以下我们介绍几种斐波那契数列在数据结构中的应用:一、斐波那契堆:
斐波那契堆是一个特殊的数据结构,用于快速排序和查找,它可以用
斐波那契数列中的公式来分配内存,从而减少内存占用,使得查找和
排序更快。
斐波那契堆是用来解决同步问题的可变数据结构,每个节
点都有一个与对应元素的权重相对应。
这种方法的主要优点是可以更
快地排序和查找,而只需很少的内存空间。
二、斐波那契搜索树:
斐波那契搜索树是一种数据结构,它使用斐波那契数列中的元素来作
为搜索树中节点的值,从而实现比普通搜索树更快的查找和排序效果。
斐波那契搜索树的主要特点是可以改变而不影响原来的结构,它的查
找和插入效率也比普通的搜索树要高出许多。
三、斐波那契哈希表:
斐波那契哈希表是一种散列表的一种数据结构,它采用斐波那契数列
中的元素作为分裂的策略,使得查找过程变得更快更有效率。
斐波那
契哈希表可以把数据分组,然后在相应的组中查找,而不用遍历所有的数据,从而极大地提高效率。
综上所述,斐波那契数列在数据结构领域有着广泛的应用,从斐波那契堆、斐波那契搜索树,到斐波那契哈希表,都可以看到斐波那契数列的应用,并且可以使用斐波那契数列来提高查找和排序的效率。
短后的区间不大于区间[0,10]的5% 。
解:由题意=δ5%,由斐波那契数列δ1
≥n F ,则n=7, 00=a ,100=b
1t =0b )(0076a b F F --=2180 , 21
130)(00760'1=-+=a b F F a t , 将1t 和'1t 代入函数,比较大小有)()('11t f t f <
则有001==a a ,21801'2==t t ,21130'11==t b ,21
50)(116512=--=a b F F b t , 将2t 和'2t 代入函数,比较大小有)()('22t f t f < ,
则有012==a a ,21502'3==t t ,2180'22==t b ,21
30)(225423=--=a b F F b t , 将3t 和'3t 代入函数,比较大小有)()('33t f t f >, 则有213033==t a ,2150'34==t t ,218023==b b ,21
60)(33433'4=-+=a b F F a t , 将4t 和'4t 代入函数,比较大小有)()('44t f t f >, 则有215044==t a ,2160'45==t t ,218034==b b ,21
70)(44324'5=-+=a b F F a t , 将5t 和'5t 代入函数,比较大小有)()('55t f t f >, 则有216055=
=t a ,2170'56==t t ,218045==b b , 则令105
351)21602180()01.05.0(2160))((55215'6=-⨯++=-++=a b F F a t ε, 将6t 和'6t 代入函数,比较大小有)()('66t f t f <,
则216056==a a ,105351'66==t b ,区间为:⎥⎦
⎤⎢⎣⎡105351,2160 所以选择6t 为极小点,=)(6t f 89.6)2170(
-=f 。
后的区间不大于区间[0,2π]的0.08倍。
解:由题意08.0=δ,由斐波那契数列δ1
≥n F ,则n=6, π2,000==b a .
1310)(006501π=--=a b F F b t , 13
16)(00650'1π=-+=a b F F a t 将1t 和'1t 代入函数,比较大小有)()('11t f t f =
则有001==a a ,13101'2π==t t ,1316'11π==t b ,13
6)(115412π=--=a b F F b t , 将2t 和'2t 代入函数,比较大小有)()('22t f t f > , 则有13622π==t a ,1310'23π==t t ,131612π==b b ,13
12)(22432'3π=--=a b F F a t , 将3t 和'3t 代入函数,比较大小有)()('33t f t f =, 则有13623π==a a ,13103'4π==t t ,1312'33π==t b ,13
8)(333234π=-+=a b F F b t , 将4t 和'4t 代入函数,比较大小有)()('44t f t f >, 则有13844π=
=t a ,1310'45π==t t ,131234π==b b , 则令325
1310))((44214'5ππε+=-++=a b F F a t , 将5t 和'5t 代入函数,比较大小有)()('55t f t f >, 则有131055π=
=t a , 131245π==b b , 区间为:⎥⎦
⎤⎢⎣⎡1312,1310ππ 所以选择'5t 为极小点,=)('5t f 99.0)3251310(
-=+ππf 。