《软件项目管理》实验指导书-陈皓
- 格式:doc
- 大小:3.50 MB
- 文档页数:73
软件项目管理实验指导书太原理工大学计算机与技术学院2011-11-11说明本书适用于软件工程专业《软件项目管理》的实验指导,共10个学时。
覆盖软件项目管理的全过程。
一、实验的性质、目的和任务:1.巩固和运用所学知识,解决具体问题,以达到理论联系实际的目的。
2.软件项目管理是为了使软件项目能够按照预定的成本、进度、质量顺利完成而进行的分析和管理活动,通过本实验主要让学生了解如何来制定软件项目的进度计划、规模成本估算、质量计划、项目配置计划及团队管理计划等,为今后从事软件项目管理工作打下良好的基础。
3.了解和掌握软件项目管理计划的制定过程,并通过对一个实际案例的计划制定过程,提高软件软件项目管理的实际能力。
*4.了解当前流行的软件项目管理工具与配置管理工具。
二、实验内容及学时分配:1.分解项目工作 (2学时)2.软件项目进度计划编制 (2学时)3.项目规模成本估算 (2学时)4.软件项目质量、团队、沟通及配置管理计划编制 (2学时)5.软件项目开发阶段各种管理(1)(2学时)6.软件项目开发阶段各种管理(2)(2学时)三、实验考核:以学生的实验报告和做实验时的表现考核为依据,有优、良、中、差四个等级,可以分别每次实验提交一个报告,也可以写成综合报告。
实验所用项目说明1、项目简述本项目是为太原某公司开发的一个《网上招聘系统》,由于这个公司的规模比较大,需要招聘的员工也很多,每次招聘总能收到成千上万的简历,如何挑选合适的应聘者常常是公司比较棘手的事情,为人力资源部的工作人员带来很多的工作量。
为此公司希望有一个自动化的招聘系统能够给他们带来工作的便利,提高工作效率,同时能及时招聘到满意的人才。
为现实企业与人才的有效联系,弥补招聘中存在的种种不足,该企业通过招标的方式确定由太原科达新公司开发该《网上招聘系统》。
公司人力资源部的工作人员通过这个招聘系统维护知识题库,编制问卷,发布职位和与这个职位相应的问卷。
应聘者可以通过网上提交自己的简历并同时回答相应的问卷。
《软件项目管理》实验指导书2 0 16年第一部分软件项目管理实验内容实验目标:通过实践,使学生进一步加深对软件项目管理方法和技术的了解,将软件项目管理的理论知识运用于软件项目开发实践,并在实践中逐步掌握项目管理工具的使用,提高项目管理能力及分析解决问题的能力。
为了配合《软件项目管理》课程,本实验要求针对《软件项目管理教学网站》项目(也可自选项目),项目简称:SPM。
完成软件项目管理的全过程实践,一共包括17个实验(实践)环节。
准备:所有的学生进行分组,每组4-5人,每组代表一个团队,并且有一个代表团队的名称。
每个团队以团队的形式完成给定的项目的项目管理的实践环节。
1、实验(实践)一、项目招投标实验目的:明白项目招投标过程实验要求:1)老师(甲方)提供项目要求2)团队(乙方)选定并分析项目3)编写***项目的项目章程4)选择2个团队课堂上进行竞标,进行答辩,提交项目章程5)其他团队进行评述,充当评审专家的角色,可以提问题。
老师评述和总结:2、实验(实践)二、项目生存期模型确定实验目的:掌握软件项目生存期模型选择方法实验要求:1)复习课程的生存期模型2)分析SPM项目特性3)确定SPM项目生存期模型4)选择1个团队课堂上讲述SPM项目生存期模型5)其他团队进行评述,可以提问题。
老师评述和总结:3、实验(实践)三、项目需求管理实验目的:掌握软件项目需求管理过程,可以编制需求规格,实验要求:1)复习需求分析的几个方法2)编写SPM项目的需求分析说明书3)复习需求变更控制流程4)编写SPM项目的需求变更控制5)选择1个团队课堂上讲述SPM项目需求规格和需求变更控制流程6)其他团队进行评述,可以提问题。
老师评述和总结:4、实验(实践)四、任务分解实践环节实验目的:明白WBS概念,掌握任务分解和验证方法实验要求:1)复习任务分解和验证方法2)编写SPM项目的任务分解,即WBS。
3)选择1个团队课堂上讲述SPM项目任务分解结果4)其他团队进行评述,可以提问题。
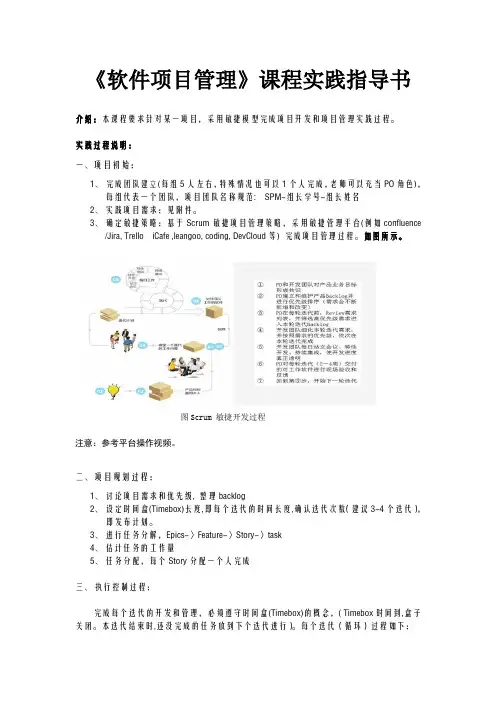
《软件项目管理》课程实践指导书介绍:本课程要求针对某一项目,采用敏捷模型完成项目开发和项目管理实践过程。
实践过程说明:一、项目初始:1、完成团队建立(每组5人左右,特殊情况也可以1个人完成,老师可以充当PO角色),每组代表一个团队,项目团队名称规范: SPM-组长学号-组长姓名2、实践项目需求:见附件。
3、确定敏捷策略:基于Scrum敏捷项目管理策略,采用敏捷管理平台(例如confluence/Jira, Trello iCafe ,leangoo, coding, DevCloud等) 完成项目管理过程。
如图所示。
图Scrum 敏捷开发过程注意:参考平台操作视频。
二、项目规划过程:1、讨论项目需求和优先级, 整理backlog2、设定时间盒(Timebox)长度,即每个迭代的时间长度,确认迭代次数(建议3-4个迭代),即发布计划。
3、进行任务分解,Epics-〉Feature-〉Story-〉task4、估计任务的工作量5、任务分配,每个Story分配一个人完成三、执行控制过程:完成每个迭代的开发和管理,必须遵守时间盒(Timebox)的概念,( Timebox时间到,盒子关闭。
本迭代结束时,还没完成的任务放到下个迭代进行)。
每个迭代(循环)过程如下:1)选择任务卡片2)编写测试用例3)编码4)运行测试用例5)重构(设计,代码)6)迭代交付通过敏捷管理平台完成如下任务:7)新迭代开始前,评审更新backlog8)每天更新任务进展9)看板沟通10)迭代完成后进行迭代评审,展示本迭代运行结果四、结束过程:1)总结项目进展情况:计划与实际的进度,工作量,迭代,工作效率,Bug等情况的总结。
2)提交项目报告(参见模版提纲)3)PPT答辩或者提交答辩视频附录《项目报告》提纲一、项目介绍对项目进行描述,说明设计。
二、项目规划简单说明, 给出截图,三、项目执行控制简单说明, 给出截图,四、项目总结,总结项目情况,例如迭代次数统计、工作量统计、开发时间统计、计划与实际的对比图、。
IT项目管理实验指导书背景材料1、需求分析某省的教育部门希望有一个现代化的信息交流平台,为此他们提出了建立《校务通管理系统的需求》,希望委托软件公司为其开发这样的一个软件项目。
经过不懈的努力,北京科力拓技术开发有限公司获得了这个项目的开发权。
《校务通管理系统》是对学校教务和教学活动进行综合管理的平台系统,是一个学校和地区教育信息化的基础信息平台。
他要求完成学校管理层、教师、学生、家长日常工作、学习、管理、咨询等任务。
其目的是共享学校各种资源、提高学校的工作效率、规范学校的工作流程、便利校内外的交流。
科力拓通过大量的调查分析,与学校领导、学生、教师、家长等进行大量的沟通,确定系统功能如下:(一)通用功能对于每位教师,登陆系统后,都应提供如下功能:(1)电子课表;(2)会议通知和公告;(3)日程安排;(4)个人日记;(5)通讯录;(6)教师答疑;(7)家庭作业。
(二)学校日常业务管理功能(1)招生工作:包括报名;入学;分班;统计查询。
(2)学生日常管理:包括档案管理;考勤管理;奖惩管理;变动管理。
(3)教务管理:包括教师日常管理;年级班级设置;学科设置;年级班级课程设计;派课表;考试;评价(4)教师备课系统(5)资源库系统(6)网上考试功能(7)聊天室(8)论坛公司采用原型分析方法进行需求分析,很快得到用户的确认,而且在项目实施过程中需求的变更比较少。
2、计划在功能需求分析结束后,进行工作分解。
根据对本项目的需求规格的分析,采用图表方式表示任务分解结构,按照功能组成标准进行工作分解。
聊天室和论坛采用标准的复用技术,网上考试功能已有成熟的产品(可直接外购),所以这些功能不用分解。
- 3 -本项目采用自下而上法和参数法综合的估算方法,具体过程如下:(1)招标成功前开始招标的时候,根据以往类似项目的经验,采用类比估算方法,进行粗略的估算:根据用户的要求采用B/S结构,公司JSP+SQL SERVER的技术比较成熟,以前成功完成过类似的项目,采用增量式的生存期模型,基本上需要2~3个开发人员,2个月左右的开发时间,基本上是4~6个人月的规模,企业的成本系数为2.5万/人月,10万~15万可以作为合同的参考价格。
软件项目管理实验指导书太原理工大学软件学院2017-5-2说明本书适用于软件工程专业《软件项目管理》的实验指导,共8个学时。
覆盖软件项目管理的全过程。
一、实验的性质、目的和任务:1.巩固和运用所学知识,解决具体问题,以达到理论联系实际的目的。
2.软件项目管理是为了使软件项目能够按照预定的成本、进度、质量顺利完成而进行的分析和管理活动,通过本实验主要让学生了解如何来制定软件项目的进度计划、规模成本估算、质量计划、项目配置计划及团队管理计划等,为今后从事软件项目管理工作打下良好的基础。
3.了解和掌握软件项目管理计划的制定过程,并通过对一个实际案例的计划制定过程,提高软件项目管理的实际能力。
*4.了解当前流行的软件项目管理工具与配置管理工具。
二、实验内容及学时分配:1.分解项目工作 (2学时)2.软件项目进度计划编制 (2学时)3.项目规模成本估算 (2学时)4.软件项目质量、团队、沟通及配置管理计划编制 (2学时)5.软件项目开发阶段各种管理(1)(2学时)6.软件项目开发阶段各种管理(2)(2学时)三、实验考核:以学生的实验报告和做实验时的表现考核为依据,有优、良、中、差四个等级,分别每次实验写一个报告,最后写成综合报告提交。
实验所用项目说明1、项目简述本项目是为太原某公司开发一个《网上招聘系统》,由于这个公司的规模比较大,需要招聘的员工也很多,每次招聘总能收到成千上万的简历,如何挑选合适的应聘者常常是公司比较棘手的事情,为人力资源部的工作人员带来很多工作量。
为此,公司希望有一个自动化招聘系统能够给他们带来工作便利,提高工作效率,同时能及时招聘到满意的人才。
为实现企业与人才的有效联系,弥补招聘中存在的种种不足,该企业通过招标的方式确定由太原科达新公司开发该《网上招聘系统》。
公司人力资源部的工作人员通过这个招聘系统维护知识题库、编制问卷、发布职位和与这个职位相应的问卷。
应聘者可以通过网上提交自己的简历并同时回答相应的问卷。
《软件项目开发与管理》实验指导书2012/2013年第二学期姓名:黄子轩学号:班级: 10软件卓越指导教师:殷凯计算机科学与技术系编写目录实验一项目计划制定一、实验目的掌握如何使用Microsoft project 2000制定项目计划。
二、实验环境软件平台:Microsoft Windows2000 /XP。
软件工具:Microsoft project 2000以上版本。
三、实验内容与要求1.Microsoft project2003的基本界面。
主要包括:标题栏、菜单栏、工具栏、编辑栏、任务窗格、视图栏。
2.新建项目计划。
主要包括:定义项目、设置项目常规工作时间、设置项目属性。
3.建立项目任务列表。
主要包括输入任务、设置项目里程碑、设置项目摘要任务、创建WBS图表、添加其它项目任务信息。
4.设置任务工期。
主要包括:任务工期的表示、任务工期估算技术、显示具有任务工期的任务。
5.设置任务链接。
主要包括:建立和修改任务链接、设置链接的前置重叠和延隔时间。
6.项目进度计划管理工具。
主要包括:设置任务限制、设置任务期限、使用任务日历、使用关键路径管理项目进度。
7.要求在试验报告中写出主要的操作流程,并插入适当的主要截图和必要的说明。
四、实验预习和准备参考Microsoft Project相关书籍,对Microsoft Project2003有初步的认识和了解。
五、实验过程与结果1、将Microsoft project 2003的操作界面与微软Office系列产品的操作界面相比较,发现其中的异同点。
发现其布局基本相似。
Microsoft project 2003的标题栏中显示运行程序的名称和Project 文件的名称,以及最大化窗口、最小化窗口、关闭窗口等快捷按钮。
在标题栏的下方是工具栏,包含按钮、菜单或两者的组合。
项目向导包含:任务、资源、跟踪和报表4个目标区域。
左侧窗格提供了循序渐进的说明,以帮助使用者完成项目管理过程中的主要操作。
软件项目管理实验指导书陈皓桂林电子科技大学计算机科学与工程学院2014.9目录实验一 Project的基本操作 (1)实验二建立项目任务与项目中的任务关系 (8)实验三项目时间管理 (18)实验四项目资源管理与成本管理 (26)实验五跟踪项目进度 (38)实验六软件配置管理 (59)实验一 Project的基本操作一、实验目的1.了解IT项目管理的基本概念和项目管理核心领域的一般知识。
2.初步掌握项目管理软件Microsoft Project的操作界面和基本操作。
3.学会使用project 2007的帮助文件.二、实验内容与步骤1.熟悉project的界面和基本操作2.了解project 2007视图(甘特图、任务分配状况、日历、网络图、资源工作表、资源使用情况、资源图表、组合视图),能够在各个视图之间切换。
3.新建项目文件、设置关键项目信息。
步骤:(1)针对某具体项目(以<软件工程>为例)做wbs功能分解(2)选着<文件>---<新建>命令,打开<新建项目>任务窗格,选择新建区域下的<空白项目>超链接,新建一个项目文件“项目1”(3)选择项目---项目信息命令,打开项目信息对话框(4)默认情况下,用户可以利用项目信息对话框指定开始时间等。
(5)在日历下拉列表中指定一个用于计算工作时间的标准日历。
(6)完成上述操作后单击<确定>。
(7)输入本组项目中的各个任务。
把功能分解的所有任务都输入(只需要输入任务名称即可)。
7、修改项目名称。
<文件>-<属性>-<属性>对话框,<常规>,修改标题为软件开发。
<主题>,修改为<Managing Information Technology Projects>.结合实际情况,可对其他选项进行修改。
8、使用模板创建项目文件(1)文件---新建,打开新建项目任务窗格(2)选择<模板>选项域下的<计算机上的模板>模板,打开模板对话框,打开<模板(3)在<项目模板>中选择<软件开发>模板,单击确定。
《软件项目管理》实验指导书2 0 16年第一部分软件项目管理实验内容实验目标:通过实践,使学生进一步加深对软件项目管理方法和技术的了解,将软件项目管理的理论知识运用于软件项目开发实践,并在实践中逐步掌握项目管理工具的使用,提高项目管理能力及分析解决问题的能力。
为了配合《软件项目管理》课程,本实验要求针对《软件项目管理教学网站》项目(也可自选项目),项目简称:SPM。
完成软件项目管理的全过程实践,一共包括17个实验(实践)环节。
准备:所有的学生进行分组,每组4-5人,每组代表一个团队,并且有一个代表团队的名称。
每个团队以团队的形式完成给定的项目的项目管理的实践环节。
1、实验(实践)一、项目招投标实验目的:明白项目招投标过程实验要求:1)老师(甲方)提供项目要求2)团队(乙方)选定并分析项目3)编写***项目的项目章程4)选择2个团队课堂上进行竞标,进行答辩,提交项目章程5)其他团队进行评述,充当评审专家的角色,可以提问题。
老师评述和总结:2、实验(实践)二、项目生存期模型确定实验目的:掌握软件项目生存期模型选择方法实验要求:1)复习课程的生存期模型2)分析SPM项目特性3)确定SPM项目生存期模型4)选择1个团队课堂上讲述SPM项目生存期模型5)其他团队进行评述,可以提问题。
老师评述和总结:3、实验(实践)三、项目需求管理实验目的:掌握软件项目需求管理过程,可以编制需求规格,实验要求:1)复习需求分析的几个方法2)编写SPM项目的需求分析说明书3)复习需求变更控制流程4)编写SPM项目的需求变更控制5)选择1个团队课堂上讲述SPM项目需求规格和需求变更控制流程6)其他团队进行评述,可以提问题。
老师评述和总结:4、实验(实践)四、任务分解实践环节实验目的:明白WBS概念,掌握任务分解和验证方法实验要求:1)复习任务分解和验证方法2)编写SPM项目的任务分解,即WBS。
3)选择1个团队课堂上讲述SPM项目任务分解结果4)其他团队进行评述,可以提问题。
软件项目管理实验大纲《软件项目管理》实验报告《软件项目管理》实验大纲一、课程性质、目的和任务软件项目管理是软件工程和项目管理的交叉学科,是项目管理的原理和方法在软件工程领域的应用。
与一般的工程项目相比,软件项目具有其特殊性,因此,软件项目管理的难度要比一般的工程项目的难度大,是当前我国软件业面临的最大挑战,同时也是软件工业化生产的必要条件。
本实验力求让学生通过学习和实验,从了解项目管理软件工具和项目管理支撑环境Microsoft Project,较系统地了解软件项目管理的理念与框架;掌握软件项目管理核心过程、方法与工具;并能针对软件项目与项目管理特点解决应用中的具体问题。
二、教学基本要求(1)加深理解并巩固《软件项目管理》课程中所学的基本概念和基本技术,培养分析问题解决问题的能力;(2)熟悉项目管理工具的使用方法,了解使用MS Project项目管理软件建立项目工程信息的过程、步骤。
(3)根据给定项目实例估算项目规模,分解任务,分配资源,制定项目计划;(4)根据给定项目实例分配资源,绘制相应的人力资源负荷曲线及费用曲线;(5)利用软件来熟悉项目的控制和跟踪,分析和更改计划。
三、实验内容及学时分配大纲基本内容包括8个必做实验, 在规定的16个学时内完成。
实验一熟悉软件环境(必做实验,综合性实验,2 学时)1.实验目的熟悉Microsoft Project环境、了解软件中各个菜单项的含义。
2.实验简介熟悉系统菜单中的各种功能、视图及系统参数的设置。
3.实验步骤1)安装Project。
2)打开Project并新建项目,选取模板。
3)根据p196页的提示输入数据4)菜单栏视图—>网络图,切换视图至网络图实验二建立工作日历(必做实验,综合实验,2学时)1.实验目的熟悉并掌握工作日历的设置和修改方法,能够熟练地为资源设置工作日或非工作日、加班时间。
2.实验内容熟悉并掌握工作日历的设置和修改方法,能够熟练地为资源设置工作日或非工作日、加班时间。
3.4 Project项目管理工具3.4.1 实验类型验证性实验,2学时,选做;3.4.2 实验目的安装并能熟练使用Project项目管理工具的基本功能;3.4.3 背景知识3.4.4 实验设备PC机一套,服务一台。
3.4.5 实验内容1)安装单机版Project;2)以书上第八章油漆工的资源组合为例,通过帮助文档使用project的基本功能;3)根据优化策略,对所给的example进行优化;3.4.6 实验步骤第一步骤:从服务器下载project安装程序和example文件;第二步骤:安装Project,并输入example;第三步骤:通过帮助文档,熟悉project的基本功能;第四步骤:根据所学的优化策略,对example进行优化;3.4.7 实验要求1)熟练使用Project的基本功能;2)撰写实验报告;3.4.8 实验思考1)可以从哪些方面来检查一个计划是否合理?2)可以使用哪些优化策略对项目计划进行进一步优化?注意:(1)你需要自定义一个油漆项目,房间类型、数量和油漆工可自定(2)在用project规划项目时,需要设计不受资源约束到受到资源约束再到资源平衡情况的项目计划优化过程。
3.5 软件项目计划的制定3.5.1 实验类型设计性实验,4学时,必做;3.5.2 实验目的借助project工具制定合理科学的软件开发计划;3.5.3 背景知识项目经理最重要的职责是做计划、整合计划和执行计划。
由于相对较短的期限和资源的优先控制,几乎所有的项目都需要正式的、详细的计划。
又因为每个职能单位可能只按自己的计划文件来进行工作而很少顾及其他职能单位,所以计划活动的整合是必要的。
为了履行个人应负的责任,计划决定需要做什么,由谁做,什么时候做。
计划阶段主要有9个主要组成部分:●目标。
一个目的、指标或在一定时间内要完成的任务。
●程序。
为到达或超过目标要采取的战略和主要的行动;●进度计划。
计划说明了个人或集体活动或任务在什么时候开始和结束。
软件项目管理实验指导书陈皓桂林电子科技大学计算机科学与工程学院2014.9目录实验一 Project的基本操作 (1)实验二建立项目任务与项目中的任务关系 (8)实验三项目时间管理 (18)实验四项目资源管理与成本管理 (26)实验五跟踪项目进度 (38)实验六软件配置管理 (59)实验一 Project的基本操作一、实验目的1.了解IT项目管理的基本概念和项目管理核心领域的一般知识。
2.初步掌握项目管理软件Microsoft Project的操作界面和基本操作。
3.学会使用project 2007的帮助文件.二、实验内容与步骤1.熟悉project的界面和基本操作2.了解project 2007视图(甘特图、任务分配状况、日历、网络图、资源工作表、资源使用情况、资源图表、组合视图),能够在各个视图之间切换。
3.新建项目文件、设置关键项目信息。
步骤:(1)针对某具体项目(以<软件工程>为例)做wbs功能分解(2)选着<文件>---<新建>命令,打开<新建项目>任务窗格,选择新建区域下的<空白项目>超链接,新建一个项目文件“项目1”(3)选择项目---项目信息命令,打开项目信息对话框(4)默认情况下,用户可以利用项目信息对话框指定开始时间等。
(5)在日历下拉列表中指定一个用于计算工作时间的标准日历。
(6)完成上述操作后单击<确定>。
(7)输入本组项目中的各个任务。
把功能分解的所有任务都输入(只需要输入任务名称即可)。
7、修改项目名称。
<文件>-<属性>-<属性>对话框,<常规>,修改标题为软件开发。
<主题>,修改为<Managing Information Technology Projects>.结合实际情况,可对其他选项进行修改。
8、使用模板创建项目文件(1)文件---新建,打开新建项目任务窗格(2)选择<模板>选项域下的<计算机上的模板>模板,打开模板对话框,打开<模板(3)在<项目模板>中选择<软件开发>模板,单击确定。
(4)创建模板后,用户根据自己的项目对模板进行修改。
三、学时分配2学时四、要求必做五、性质验证六、所需仪器设备微机、网络、Microsoft Project2003七、实验思考题1、项目管理概念2、项目管理的九大领域知识3、介绍下project 2003中的几种视图及其主要特点。
八、实验要求1、根据实验内容完成任务,按上机报告的撰写规范完成实验报告。
报告不得相互抄袭或拷贝,否则一律不及格。
2、实验报告至少包括以下内容:①实验目的;②实验内容和步骤;③实验结果(包括本项目的wbs实验截图);④实验思考题3、实验报告由每班学习委员统一收齐,并于下一次上课的时候上交。
4、每次实验必须自己保存好实验结果,以备下次实验时使用。
实验二建立项目任务与项目中的任务关系一、实验目的:学习利用Project创建任务列表,编辑任务列表,排定任务日程,建立任务相关性,拆分任务和任务限制等。
二、实验内容与步骤实验内容:以某具体项目(以Software Products为例)为例,创建任务列表,排定任务日程,建立任务相关性。
实验步骤:1、输入任务及工期。
其中d=工作日;w=周工时; m=分工时; mo=月工时;ed= 耗用天数;ew= 耗用周数2、把任务设置为里程碑(里程碑是用于标识日程中的重要事项,其工期为0)选择要设置为里程碑的任务,选择<项目>-<任务信息>-<高级>选项卡,选择<标记为里程碑>单选框.3、输入周期性任务(项目进行过程中重复发生的任务):<插入>-<周期性任务>-周期性任务信息.4、编辑任务列表(1)使用任务信息对话框(<项目>-<任务信息>-<常规>)(2)使用大纲组织任务列表。
(在甘特图的任务名称域选择第一个要作为子任务的任务,然后选择插入-新任务命令,在任务名称域中输入摘要任务的任务名称,最后选择要作为子任务的多个任务,单击降级按扭把这些任务降级为子任务)5、对任务分组(<项目>-<分组依据<G>:不分组>- <不分组>)6、排定任务日程(1)为项目选定基准日历(理解基准、项目、资源和任务四种日历,知道四种基准日历的异同):<项目>-<项目信息>.(2)改变日期显示格式。
<工具>-<选项>-<视图>-<日期格式> (3)自定义工作时间:< 工具>-<选项>-<日历>(4) 新建日历 :<工具>-<更改工作时间>-<新建日历>(5) 编辑日历 <工具>-<更改工作时间>-<单击工作日以查看其工作时间> -选择日期(6) 设置日历视图的外观: <视图>-<日历>; -<格式>-<条形图样式>(7) 为任务分配日历:双击要为其分配日历的任务<编写代码 >-打开<任务信息>对话框-高级-日历下拉列表中选择分配给任务的日历.(选中排定日程忽略资源日历)7、建立任务的相关性:甘特视图中选择要建立相关性的任务在常用工具栏中,选择链接任务或者选择编辑-链接任务命令建立任务的相关性(不少于两个任务)。
8、能够进行任务的拆分。
常用工具栏-单击任务拆分。
三、学时分配2学时四、要求必做五、性质验证六、所需仪器设备微机、网络、Microsoft Project2003七、实验思考题1、任务之间的关系有那几种,如何确定活动之间的关系八、实验要求1、根据实验内容完成任务,按上机报告的撰写规范完成实验报告。
报告不得相互抄袭或拷贝,否则一律不及格。
2、实验报告至少包括以下内容:①实验目的;②实验内容和步骤;③实验结果(含截图)(在实验中截取所做的完整任务图,大纲视图,分组视图,粘贴在实验报告中.);④实验思考题3、实验报告由每班学习委员统一收齐,并于下一次上课的时候上交。
4、每次实验必须自己保存好实验结果,以备下次实验时使用。
实验三项目时间管理一、实验目的学习利用Project定义项目的时间,项目的跟踪等。
二、实验内容与步骤(1)定义项目开始时间。
新建空白项目后,显示任务向导,<项目>-<启用项目向导>。
其中第一步就是设置定义项目的开始时间。
(2)设置项目日历。
选择一个日历模板,定义工作周,更改工作时间和设置假日。
定义时间单位,保存日历设置。
(3)指定任务时间。
在甘特图视图中创建任务,在任务名称域选择要指定时间的任务名,选择项目-任务信息,打开<任务信息>对话框。
选择<开始>下拉列表按钮,打开日历,在日历中设置任务的开始日期,在工期文本框中输入任务的工期,设置完毕,单击确定。
重复以上操作,完成每个任务的时间设置。
(4)设置里程碑工期为0的任务(5)项目的跟踪设置基准计划:工具-跟踪-设置比较基准,选择<设置比较基准>单选按钮,然后单击其下方的下拉列表按钮,选择需要的比较基准选项。
在范围选项区域中选择完整项目。
查看比较基准信息:1、使用项目统计。
项目-<项目信息>菜单命令,弹出<项目信息>对话框,单击<统计信息>按钮,弹出该项目的项目统计对话框,在项目对话框中可以查看当前与比较基准的开始时间、结束时间、工时、工期、成本等信息,以及两者的差异。
2、使用比较基本表 :在甘特图视图下,选择视图-表-其他表,弹出<其他表>对话框,选择<任务>单选按钮,在列表框中选择比较基准,单击应用按钮,这样视图中就会显示比较基准表。
跟踪项目进程:甘特图视图中,选择一个任务,鼠标放在该行任何位置双击,弹出<任务信息>对话框,选择<常规>选项卡,输入<期限>和<盈亏分析方法>。
返回甘特图视图,可看到该任务的进度横条上可以看到行条中间出现的黑线代表完成任务的百分比。
通过更新任务对话框跟踪任务进度。
工具-跟踪-更新任务打开更新任务对话框。
创建进度线Microsoft Office Project 2003 将绘制一条进度线来连接进行中的任务和本应开始的任务,并在“甘特图”中创建一个图表,其中对于落后于日程的工时,顶点指向左侧;对于提前于日程的工时,顶点指向右侧。
顶点与垂直线的距离表示任务在进度或状态日期上超前或落后于日程的程度):甘特视图中选择视图-工具栏-跟踪命令,打开跟踪工具栏,单击工具栏中的添加进度线按钮。
将鼠标放置在任务的进度横条上,随即打开进度线提示框。
双击创建的进度线打开进度线对话框选择日期与间隔选项卡,修改进度日期,选择线条样式,选择进度线类型,修改线条样式。
如果要删除设置的进度线,可在日期与间隔选项卡中的进度线日期列表框中选择要删除的进度线日期,然后单击删除按钮,单击确定。
三、学时分配2学时四、要求必做五、性质验证六、所需仪器设备微机、网络、Microsoft Project2003七、实验思考题1、简介项目时间估算的常用方法八、实验要求1、根据实验内容完成任务,按上机报告的撰写规范完成实验报告。
报告不得相互抄袭或拷贝,否则一律不及格。
2、实验报告至少包括以下内容:①实验目的;②实验内容和步骤;③实验结果(含截图)(在实验中截取所做的完整任务图,大纲视图,分组视图,粘贴在实验报告中.);④实验思考题3、实验报告由每班学习委员统一收齐,并于下一次上课的时候上交。
4、每次实验必须自己保存好实验结果,以备下次实验时使用。
实验四项目资源管理与成本管理一、实验目的学习利用Prroject创建资源列表、资源分配,成本分配及运作等。
二、实验内容与步骤(1)创建资源列表:在已创建的项目中选择<视图>-<资源工作表>命令,打开资源工作表,在资源名称域中,分别输入资源的名称,在类型域中指定资源类型为工时或材料,在这里人员指定为工时,如果要指定资源组,可在资源名称的组域中输入组的名称。
对每个工时资源(人员或设备),在最大单位域中使用默认值为100%,如为200%,表明特定的资源的两个全职单位(2)利用资源信息对话框设置资源。
在资源工作表中选择某资源后,单击常用工具栏中的资源信息按钮,或双击该资源,就可以打开资源信息对话框。