基于AT89S51单片机的超声波测距系统的设计与研究
- 格式:pdf
- 大小:276.68 KB
- 文档页数:3

基于AT89S51单片机的超声波测距仪设计学生姓名:所在系:专业名称:班级:学号:指导教师:基于AT89S51单片机的超声波测距仪设计学生:指导教师:内容提要:咱们明白,当物体振动时会发作声音。
科学家们将每秒钟振动的次数称为声音的频率,它的单位是赫兹。
咱们人类耳朵能听到的声波频率为20~20000赫兹。
当声波的振动频率大于20000赫兹或小于20赫兹时,咱们便听不见了。
咱们把频率高于20000赫兹的声波称为“超声波”。
超声和可闻声本质上是一致的,它们的一起点都是一种机械振动。
其不同点是超声频率高,波长短,具有方向性强、能量集中、不受光和电磁波和粉尘等外界因素的干扰等优势。
因此,超声波可用于非接触测量,利用计算超声波在被测物体和超声波探头之间的传输来测量距离的,对被测目标无损害。
而且超声波传播速度在相当大范围内与频率无关。
正由于如此,目前关于超声波精准测距的需求也愈来愈大,在机械制造,电子冶金,航海,宇航,石油化工,交通等工业领域具有普遍地应用。
另外,在材料科学,医学,生物科学等领域中也占具重腹地位。
本文要紧介绍基于AT89S51单片机,辅助以CX20206A红外接收专用放大电路,TCT40-10超声波传感器和数字化的温度传感器DS18B20设计的超声波测距仪。
测距原理采纳一样的方式:渡越时刻法TOF(time of flight)来测量物体与发声源的距离。
测量距离可能5m,测量精度约为0.01m。
关键字:超声波渡越时刻法 AT89S51 CX20206A TCT40-10 DS18B20AT89S51 MCU-BASED DESIGN OF ULTRASONICRANGE FINDERAbstract:We know that objects will sound when they vibrate. Scientists call the number of vibrations per second frequency of sound, its unit is the Hertz. Our human ears can hear the sound frequency between 20 ~ 20,000 Hz. When the sound wave frequency is greater than 20000 Hz or less than 20 Hz, we can’t listen it. We have higher than 20000 Hz frequency sound waves known as "Ultrasonic". The sound wave which we can listen and ultrasonic have the same essence, they are also a mechanical vibration. Their difference is that the ultrasonic have a high-frequency and a short wavelength, furthermore it is high directivity, concentrated energy, and free form light and dust, such as electromagnetic interference from external factors, etc. Therefore, ultrasound can be used for non-contact measurement, the use of ultrasound in the calculation of the measured objects and the transmission between the ultrasonic probe to measure the distance of the measured target without damage.This paper mainly introduces single-chip based on the AT89S51, auxiliary CX20206A infrared receiver to a dedicated amplifier and TCT40-10 ultrasonic sensor designed ultrasonic range finder. Ranging general principle of the method used: transit-time method TOF (time of flight) to measure objects with the sound source distance. Measuring the distance about 5m, the measurement accuracy of about 0.01m.Key words:ultrasonic time of flight ultrasonic-sensor AT89S51 CX20206A TCT40-10 DS18B20目录一、引言............................................................................................................ 错误!未定义书签。

摘要本设计介绍了基于单片机控制的超声测距仪的原理:由AT89C51控制定时器产生超声波脉冲并计时,计算超声波自发射至接收的往返时间,从而得到实测距离。
并且在数据处理中采用了温度补偿的调整,用四位LED数码管切换显示距离和温度。
整个硬件电路由超声波发射电路、超声波接收电路、电源电路、显示电路等模块组成。
各探头的信号经单片机综合分析处理,实现超声波测距仪的各种功能。
在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
相关部分附有硬件电路图、程序流程图,给出了系统构成、电路原理及程序设计。
此系统具有易控制、工作可靠、测距准确度高、可读性强和流程清晰等优点。
实现后的作品可用于需要测量距离参数的各种应用场合。
关键词:AT89C51,超声波,温度补偿,测距AbstractThe design introduces the principle of the ultrasonic distance measurement instrument based on SCMC-controlled: AT89C51 controls timers to produce the ultrasonic wave pulse and time,count the time of ultrasonic wave spontaneous emission to receive round-trip,thus obtains the measured distance.And the temperature compensation adjustment is used in the data processing, with four LED nixie tubes display distance or temperature by switching.The entire hardware circuit is composed by ultrasonic transmitter circuit, ultrasonic receiver circuit, the power circuit, display circuit, and other modules. The probe signals are integrated analysised by SCMC to achieve the various functions of ultrasonic distance measurement instrument.Based on this has designed system's overall concept, final adoption of hardware and software to achieve the various functional modules. The relevant parts have the hardware schematics and process flow chart.It has given the system constitution, the circuitry and the programming. The instrument system has features: ease of control, stability of operation, highness of precision and distinctness of programme process ,etc. After the realization of the works can be used for needs of the various parameters measured distance applications.Keywords:AT89C51, Ultrasonic wave, Temperature compensation, Measure distans目录摘要 (I)Abstract (II)目录 (1)第1章引言 (1)1.1 课题研究的背景 (1)1.2 课题研究的意义 (1)1.3 论文结构 (2)第2章超声波测距原理 (3)2.1 超声波简介 (3)2.2 超声波测距原理 (3)第3章方案论证 (5)3.1 设计思路 (5)3.2 系统结构设计 (6)第4章主要元件介绍 (7)4.1 单片机AT89C51 (7)4.2 超声波传感器T40、R40 (9)4.3 温度传感器DS18B20 (10)第5章硬件电路设计 (11)5.1 超声波发射电路 (11)5.2 超声波接收电路 (11)5.3 显示电路 (12)5.4 电源电路 (13)5.5 复位电路 (13)第6章软件设计 (14)6.1 主程序流程 (14)6.2 子程序设计 (15)6.2.1 超声波发送子程序及超声波接收中断子程序 (15)6.2.2 测温子程序 (17)6.2.3 距离计算子程序 (17)6.2.4 显示子程序和键盘扫描子程序 (18)第7章软件调试及系统仿真 (19)7.1 软件编译调试环境——Keil (19)7.2 系统仿真环境——Proteus (19)7.3 系统仿真 (19)7.4 误差及特性分析 (22)结论 (23)致谢 (24)参考文献 (25)附录1 整体电路图 (26)附录2 程序 (27)第1章引言1.1 课题研究的背景人们生活水平的提高,城市发展建设加快,城市给排水系统也有较大发展,其状况不断改善。
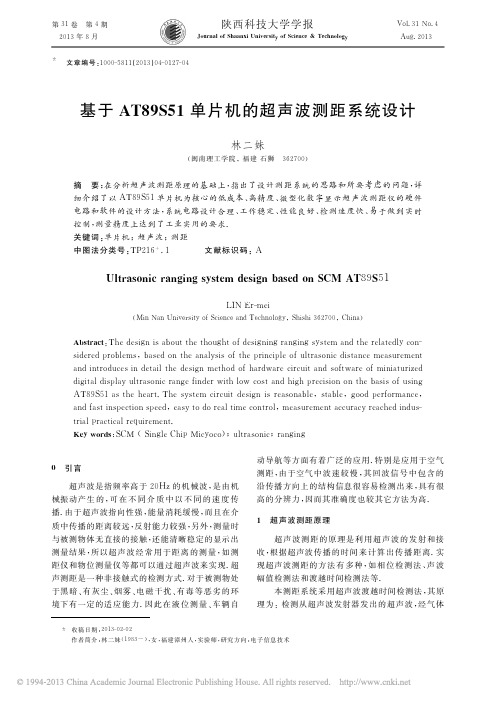
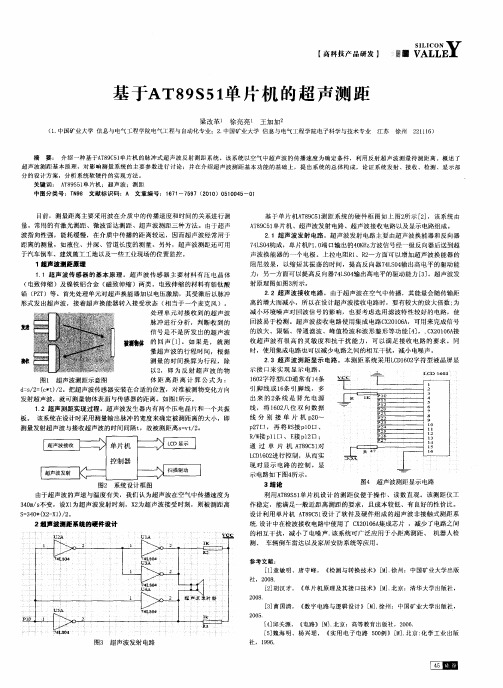
第31卷 第4期 陕西科技大学学报 Vol.31No.4 2013年8月 Journal of Shaanxi University of Science &Technology Aug.2013* 文章编号:1000-5811(2013)04-0127-04基于AT89S51单片机的超声波测距系统设计林二妹(闽南理工学院,福建石狮 362700)摘 要:在分析超声波测距原理的基础上,指出了设计测距系统的思路和所要考虑的问题,详细介绍了以AT89S51单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件的设计方法,系统电路设计合理、工作稳定、性能良好、检测速度快、易于做到实时控制,测量精度上达到了工业实用的要求.关键词:单片机;超声波;测距中图法分类号:TP216+.1 文献标识码:AUltrasonic ranging system design based on SCM AT89S51LIN Er-mei(Min Nan University of Science and Technology,Shishi 362700,China)Abstract:The design is about the thought of designing ranging system and the relatedly con-sidered problems,based on the analysis of the principle of ultrasonic distance measurementand introduces in detail the design method of hardware circuit and software of miniaturizeddigital display ultrasonic range finder with low cost and high precision on the basis of usingAT89S51as the heart.The system circuit design is reasonable,stable,good performance,and fast inspection speed,easy to do real time control,measurement accuracy reached indus-trial practical requirement.Key words:SCM(Single Chip Micyoco);ultrasonic;ranging0 引言超声波是指频率高于20Hz的机械波,是由机械振动产生的,可在不同介质中以不同的速度传播.由于超声波指向性强,能量消耗缓慢,而且在介质中传播的距离较远,反射能力较强,另外,测量时与被测物体无直接的接触,还能清晰稳定的显示出测量结果,所以超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现.超声测距是一种非接触式的检测方式.对于被测物处于黑暗、有灰尘、烟雾、电磁干扰、有毒等恶劣的环境下有一定的适应能力.因此在液位测量、车辆自动导航等方面有着广泛的应用.特别是应用于空气测距,由于空气中波速较慢,其回波信号中包含的沿传播方向上的结构信息很容易检测出来,具有很高的分辨力,因而其准确度也较其它方法为高.1 超声波测距原理超声波测距的原理是利用超声波的发射和接收,根据超声波传播的时间来计算出传播距离.实现超声波测距的方法有多种,如相位检测法、声波幅值检测法和渡越时间检测法等.本测距系统采用超声波渡越时间检测法,其原理为:检测从超声波发射器发出的超声波,经气体*收稿日期:2013-02-02作者简介:林二妹(1983-),女,福建漳州人,实验师,研究方向:电子信息技术陕西科技大学学报第31卷介质的传播到接收器的时间,即渡越时间.渡越时间与气体中的声速相乘,就是声波传输的距离.超声波发射器向某一方向发射超声波,在发射时刻的同时单片机开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时.再由单机计算出距离,送LED数码管显示测量结果.超声波在空气中的传播速度随温度变化,其对应值如表1,根据计时器记录的时间t(见图1),就可以计算出发射点距障碍物的距离(s),即s=v*t/2.表1 声速与温度的关系温度/℃-30-20-10 0 10 20 30 100声速/(m/s)313 319 325 323 338 344 349 386图1 超声波测距时序图2 单片机超声波测距系统设计框图单片机超声测距系统框图如图2.该系统由单片机控制模块、超声波发射电路和接收电路、显示电路、供电电源及报警电路组成[1].图2 系统设计框图3 单片机超声波测距系统硬件电路设计本设计主要包括单片机控制系统、超声波发射电路和接收电路、显示电路、供电电源、报警输出电路等几部分[2].3.1 单片机控制系统超声波测距单片机控制系统采用AT89S51为核心芯片,系统晶振采用12MHz的晶振.各端口定义为:P2.7为输出超声波换能器所需的40kHz的方波信号,P3.5为监测超声波接收电路输出的返回信号.显示电路采用三位一体LED数码管,P2口为段码输出,P3.2、P3.3、P3.4为位码输出端,P3.1、P0.2为报警控制端口,P3.6为数值调整键,P3.7为功能键[3].该系统如图3所示.图3 超声波测距单片机控制系统3.2 超声波发射电路和接收电路3.2.1 超声波发射电路超声波发射电路如图4所示,超声波发射电路由电阻R1、三极管BG1、超声波脉冲变压器B及超声波发送头T40构成,超声波脉冲变压器的作用是提高加载到超声波发送头两端的电压,以提高超声波的发射功率,从而提高测量距离.由AT89S51单片机的P2.7输出40kHz的方波,经三极管BG1推动超声波脉冲变压器,在脉冲变压器次级形成60VP-P的电压,加载到超声波发送头上,驱动超声波发射头发射超声波.3.2.2 超声波接收电路超声波接收电路如图5所示,接收电路由BG2、BG3组成的两级放大电路构成.超声波的检波电路、比较整形电路由C8、D5、D6及BG4组成.发送出的超声波,遇到障碍物后,产生回波,反射回来的回波由超声波接收头接收到.由于反射回来的超声波信号非常微弱,所以接收到的信号加到BG2、BG3组成的两级放大器上进行放大.每级放大器的放大倍数为70倍.放大的信号通过I N4148检波二极管检波得到解调后的信号,最后输出一负跳变,输入单片机的P3.5脚.3.3 显示电路显示电路采用三位一体LED数码管显示所测距离值,如图6.数码管采用动态扫描显示,段码输出端口为单片机的P2口,位码输出端口分别为单片机的P3.4、P3.2、P3.3口,数码管位驱运用PNP三极管要S8550驱动.·821·第4期林二妹:基于AT89S51单片机的超声波测距系统设计图4 超声波发射电路图5 超声波接收电路3.4 供电电源电路供电电源电路采用LM7805集成稳压器作为稳压器件,220V电源经降压、整流、滤波后送入LM7805稳压,输出端接一个470uF和0.1uF电容滤除纹波,得到+5V稳压电源,电路如图7所示.同时为调试系统方便,供电方式另采用由电脑USB接口供电.3.5 报警输出电路为提高测距系统的实用性,本测距系统的报警输出提供开关量信号及声响信号两种方式.方式一:报警信号由单片机P3.1端口输出,图6 显示部分电路结构图7 供电电源电路继电器控制,可驱动较大的负载,电路由电阻R6、三极管BG9、继电器JDQ组成,当测量值低于事先设定的报警值时,继电器吸合,测量值高于设定的报警值时,继电器断开.方式二:报警信号由单片机P0.2口输出,提供声响报警信号,电路由电阻R7、三极管BG8、蜂鸣器BY组成,当测量值低于事先设定的报警值时,蜂鸣器发出“滴、滴、滴…..”报警声响信号,测量值高于设定的报警值时,停止发出报警声响.报警输出电路如图8.4 单片机超声波测距系统软件设计单片机超声波测距系统的软件设计采用C语言编程.设计主要由主程序、超声波发生子程序、超声波接收程序及显示子程序几部分组成[4].超声波测距程序流程图如图9.本设计主程序首先是对系统初始化,设定时器0为计数,1为定时.置位总中断允许位EA.进行程序主程序后,进行定时测距判断,当测距标志位EC=1时,测量一次,程序设计超声波测距频度是·921·陕西科技大学学报第31卷图8 报警输出电路图9 超声波测距程序流程图4~5次/秒.测距间隔中,整个程序主要进行循环扫描显示测量结果.当调用超声波测距子程序后,首先由单片机产生4个频率为38.46kHz超声波脉冲,加载到超声波发头上.超声波头发送完超声波后,计时器T0开始计时,为了避免超声波从发射头直接传送到接收头引起的直射波触发,这时,单片机延时约1.5~2ms后,才启动对单片机P3.5脚的电平判断程序.当检测到P3.5脚的电平由高转为低时,T0停止计时[5].由于单片机采用的是12MHz的晶振,计时器每计一个数就是1μs,当超声波测距子程序检测到接收成功的标志位后,将计数器T0中的数(即超声波来回所用的时间)按公式计算,即可得被测物体与测距仪之间的距离.5 系统安装与调试编写程序与调试,用编程器将KEIL软件对应源程序编译生成.HEX文件烧写到AT89S51单片机中.按图焊接硬件电路,焊接完后单独测试确保整个系统能正常工作,最后将写好的单片机插入到测距板上,通电后将测距板的超声波头对着墙面往复移动,看数码管的显示结果会不会变化,在测量范围内能否正常显示.如果一直显示“---”,则需将下限值增大.本测距板1s测量4~5次,超声波发送功率较大时,测量距离远,则相应的下限值(盲区)应设置为高值.试验板中的声速没有进行温度补偿,声速值为340m/s,该值为15℃时的超声波值.经测试表明,本系统实现了预期的控制要求.6 结束语本系统利用单片机AT89S51实现超声波测距功能,该系统设计合理、工作稳定、性能良好、检测速度快、易于做到实时控制,并且在测量精度方面能达到工业的要求.可应用于汽车的倒车雷达、机器人自动避障行走、建筑施工工地以及一些工业现场,如:液位、井深、管道长度等场合.该设计具有很大的现实意义.参考文献[1]沈红卫.基于单片机智能系统设计与实现[M].北京:电子工业出版社,2005.[2]赵建领,薛园园.51单片机开发与应用技术详解[M].北京:电子工业出版社,2009.[3]楼然苗,李光飞.51系列单片机设计实例[M].北京:北京航空航天大学出版社,2003.[4]杨国田,白 焰,董 玲.51单片机实用C语言程序设计[M].北京:中国电力出版社,2009.[5]李鸣华,余水宝.单片机在超声波料位测量中的应用[J].电子技术应用,1998,24(9):14-16.·031·。

基于89c51的超声波测距单片机课设一、引言本文将探讨基于89c51的超声波测距单片机课设的相关内容。
通过该课设,我们可以学习到单片机的基本原理和应用,以及超声波测距技术的实现原理和方法。
二、超声波测距原理超声波测距是一种通过发送超声波脉冲并测量其返回时间来计算距离的技术。
基于89c51的超声波测距单片机,可以通过以下步骤实现测距:1.初始化超声波模块和显示屏模块。
2.发送超声波脉冲。
3.接收超声波返回信号,并计算返回时间。
4.根据返回时间计算距离。
5.在显示屏上显示测距结果。
三、硬件设计1. 单片机选择我们选择使用89c51单片机作为控制芯片,因为它具有丰富的外设接口和较高的运算性能,适合用于控制超声波模块和显示屏。
2. 超声波模块超声波模块包括超声波发射器和接收器。
发射器用于发送超声波脉冲,接收器用于接收超声波的返回信号。
选择合适的超声波模块可以确保测距的准确性和稳定性。
3. 显示屏模块显示屏模块用于显示测距结果。
可以选择液晶显示屏或数码管等适合的显示模块。
四、软件设计1. 系统初始化在系统初始化阶段,需要对单片机的外设进行初始化设置,包括超声波模块和显示屏模块。
2. 超声波模块驱动程序超声波模块驱动程序用于控制超声波的发送和接收。
通过发送脉冲并计算返回时间,可以得到距离的测量结果。
3. 显示程序设计显示程序设计用于将测距结果显示在显示屏上。
可以通过数码管、液晶显示屏等方式实现。
五、实验步骤以下是基于89c51的超声波测距单片机课设的实验步骤:1.硬件搭建:连接89c51单片机、超声波模块和显示屏模块。
2.编写初始化程序:对单片机的外设进行初始化设置。
3.编写超声波模块驱动程序:控制超声波的发送和接收。
4.编写显示程序:将测距结果显示在显示屏上。
5.调试程序:通过实验验证程序的正确性和稳定性。
6.测距实验:将物体放置在不同距离上,进行测距实验,并记录测量结果。
7.分析实验结果:根据实验结果对课设进行评估和改进。
基于AT89C51单片机的超声波测距系统设计
王香梅;薛英龙
【期刊名称】《新技术新工艺》
【年(卷),期】2015(000)005
【摘要】超声波测距在水库液位测量、汽车倒车、机器人定位及避障等方面应用十分广泛,其结构简单,成本低,不受色彩、电磁场和光照度等因素的影响.本文主要分析了超声波测距的原理,设计了以AT89C51单片机为核心的超声波测距系统,阐述了其实现过程,分析了回波检测对系统的影响.
【总页数】4页(P35-38)
【作者】王香梅;薛英龙
【作者单位】西安职业技术学院,陕西西安710032;西电三菱电机开关设备有限公司,陕西西安710032
【正文语种】中文
【中图分类】TP306
【相关文献】
1.基于AT89C51单片机的超声波测距系统设计 [J], 戴曰章;吴志勇
2.基于AT89C51超声波测距控制系统设计 [J], 李录锋
3.基于STC89C52单片机的超声波测距系统设计 [J], 吴恩仪; 陈凌君
4.基于单片机的超声波测距汽车倒车防撞系统设计 [J], 李杰
5.基于单片机的智能水位监控识别系统设计
——超声波测距研究 [J], 甘新泉
因版权原因,仅展示原文概要,查看原文内容请购买。
目录摘要 (1)第1章绪论 (2)1.1 课题背景,目的和意义 (2)1.2基于单片机的超声波测距系统 (2)1.3课题主要内容 (3)第2章超声波测距原理概述 (4)2.1超声波传感器 (5)2.1.1超声波发生器 (5)2.1.2压电式超声波发生器原理 (5)2.1.3单片机超声波测距系统构成 (6)第3章设计方案 (7)3.STC89C52单片机 (7)3.2 超声波测距系统构成 (8)3.2.1 超声波测距单片机系统 (9)3.2.2 超声波发射、接收电路 (9)第4章系统软件设计 (10)4.1 主程序设计 (10)4.4 超声波测距程子序流程图 (12)第5章调试及性能分析 (13)5.1调试步骤 (13)5.2调试结果 (13)参考文献 (14)摘要超声波具有指向性强,能量消耗缓慢,传播距离较远等优点,所以,在利用传感器技术和自动控制技术相结合的测距方案中,超声波测距是目前应用最普遍的一种,它广泛应用于防盗、倒车雷达、水位测量、建筑施工工地以及一些工业现场。
本课题详细介绍了超声波传感器的原理和特性,以及STC公司的STC89C52单片机的性能和特点,并在分析了超声波测距的原理的基础上,指出了设计测距系统的思路和所需考虑的问题,给出了以STC89C52单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。
该系统电路设计合理、工作稳定、性能良好、检测速度快、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。
关键词:超声波单片机测距STC89C52AbstractUltrasonic wave has strong pointing to nature ,slowly energy consumption ,propagating distance farther ,so, in utilizing the scheme of distance finding that sensor technology and automatic control technology combine together ,ultrasonic wave finds range to use the most general one at present ,it applies to guard against theft , move backward the radar , water level measuring , building construction site and some industrial scenes extensively。
毕业设计(论文)正文题目基于AT89S51单片机超声波测距系统的设计专业机械设计制造及其自动化班级姓名学号指导教师职称基于AT89S51单片机超声波测距系统的设计摘要:本文主要研究开发了一种基于单片机微处理器的超声波测距系统。
该系统以空气中超声波的传播速度为确定条件,利用反射超声波测量待测距离。
在介绍超声传感器原理与特性和超声测距系统功能的基础上,提出了系统的总体构成。
介绍了具体的软硬件设计以及相关的实验情况,针对测距系统发射、接收、检测、显示部分的总体设计方案进行了论证,对测距系统的一些主要参数进行了讨论。
关键字:超声波,测距,测量精度THE STUDY AND APPLICATION OFDISTANCE-MEASUREMENT SYSTEM BASED ONULTRASONIC WA VEABSTRACT: This paper primarily investigates a kind of ultrasonic distance measurement device based on microprocessor. This device can measure certain distance with reflected wave on condition that the speed of transmitting wave is fixed. It generally specifies the theoretical foundation of the device, introduces the software and hardware design of the device and correlative experiments. The design of the distance measurement is targeted on high precision and little blind area. Then it proposes the whole structure of the system by introducing the function of ultrasonic distance meter and presenting the theory and characters of ultrasonic sensor. And then the transmission, receiver, detection, display scheme of this distance meter system is brought out. At the same time, a number of main technical parameters are discussed.Key Words: ultrasonic,measuring distance, measurement accuracy目录第一章绪论 (1)1.1.引言 (1)1.2.超声波检测技术的发展 (1)1.3.超声波技术的广泛应用 (2)第二章超声波测距技术综述 (3)2.1.引言 (3)2.2.超声波介绍 (3)2.2.1.超声波的基本性质 (4)2.3.超声波传感器介绍 (4)2.3.1.超声波传感器的原理及结构 (4)2.4.超声检测概述 (7)第三章超声波测距系统的原理与设计 (9)3.1.引言 (9)3.2.超声波测距的原理及实现 (9)3.3.超声波测距系统的总体方案 (10)3.4.超声波测距系统硬件电路设计 (12)3.4.1.超声波发射电路设计 (12)3.4.2.超声波接收电路设计 (19)3.4.3.比较电路 (21)3.4.4.电源电路 (22)3.4.5.显示电路 (23)3.4.6. AT89S52单片机最小系统 (24)3.5.超声波测距系统软件设计 (27)3.5.1.系统软件设计总体框图 (27)3.5.2.软件程序模块化设计 (28)第四章结论及展望 (32)参考文献 (33)致谢 (34)第一章绪论1.1.引言高速度,高效率是现代工业的标志,而这是建立在高质量的基础之上的。
收稿日期:2008—12—10作者简介:贺瑞强(1984—),男,陕西府谷人,在读研究生,研究方向:为多媒体通信与数字家园。
E -mail:heruiqiang320@163.co m基于AT89S51单片机的超声波测距系统的设计与研究贺瑞强,王 民(西安建筑科技大学信控学院,陕西西安710055)摘 要:分析了超声波测距的基本原理,在此基础上提出了设计的思路和所要解决问题的方案。
此设计是基于AT89S51单片机性能和特点来实现的,且经过校正后,其精度可达1c m 。
完全满足汽车防撞系统的设计要求,弥补了汽车观后镜的不足。
关键词:超声波;AT89S51单片机;测距仪中图分类号:TP 274+.53 文献标识码:A 文章编号:1008-3871(2009)02-0054-03 超声波是指频率高于20KHz 的机械波。
由于超声波指向性强,能量消耗缓慢,不仅在介质中传播的距离较远,反射能力较强,而且测量时与被测物体无直接接触,还能够清晰稳定地显示测量结果。
随着我国公路的迅速发展,事故发生频率也越来越高,基于超声波的倒车测距系统可以实时的监控汽车间距,有效的减少了事故发生率。
本文将介绍一种改进型的超声波测距系统,其硬件设计简单,从而可以有效的降低成本。
另外,在稳定性和精确度上也有所改善。
1 超声波测距原理超声波测距的原理是利用超声波的发射和接收,根据超声波传播的时间来计算出传播距离。
实用的测距方式有两种,一种是在被测距离的两端,一端发射,另一端接收的直接波方式,一种是发射波被对象物反射回来后接收的反射波方式,本设计采用反射接收回波方式。
本设计选择40kHz 频率的超声波,分辨率为1c m ,测量范围为10c m ~5m ,设l 为测量距离,t 为往返时间差,超声波的传播速度为c,则有t =2l/c,而声波在空气中传输速率为c =c01+T/273(m /s )。
式中T 为环境温度;c0为绝对温度时的速度。
若设温度为25℃,则c =340m /s,故声波在1c m 距离往返的时间为t =2×1×10-2340≈58.8×10-6s ,即58.8us 。
测距仪的分辨率为1c m ,即以这个时间为计时单元,每经过一个计时单元,计数器加一,中断后,计数器停止计数,计数器中的值就是所测距离,单位是c m 。
为防止发射波直接到达接收探头,需经过一段延时,延时时间取588us,即经过10c m 后开始计数,所以有10c m 的盲区。
2 系统硬件设计2.1 系统总体设计原理图(见图1) 本系统硬件部分由嵌入式控制部件,超声波发射电路,接收电路,显示电路,声音光报警电路,数据锁定电路几部分组成,其中嵌入式控制部件采用AT89S51,支持在线下载程序,方便调试和系统扩展,系统资源有4k flash ROM ,128Bytes RAM ,32个I/O 口,2个定时器/计数器,6个中断源。
单片机选用12M 晶振,手动复位。
在PCB 布线时,电源接滤波电容,超声波发射部分和接收部分应相隔一段距离,并尽可能用粗线,以防止干扰。
2.2 超声波发射部分 脉冲发射采用软件方式,利用AT89S51的P1.0口发射40kHz 的方波信号,经过74HC04放大后输出到超声波换能器。
74HC04是一个高速C MOS 六反相器,具有对称的传输延迟和转换时间,而相对于LSTT L 逻辑I C,它的功耗减少很多。
对于HC 类型,其工作电压为2V ~6V ,它具有高抗扰度,可以兼容直接输入LSTT L 逻辑信号和CMOS 逻辑输入。
图1系统总体原理图本系统将40kHz 方波信号分成两路,分别由 2009年3月第19卷 第2期榆林学院学报JOURNAL OF Y UL I N UN I V ERSI TY Mar .2009Vol .19No .274HC04经两次和一次反向放大,从而构成推拉式反向放大。
电路如图2所示。
2.3 超声波接收部分 声波接收部分采用集成芯片CX20106A,这是一款红外线检波接收的专用芯片,常用于电视机红外遥控接收器。
内部电路由前置放大器、自动偏置电平控制电路、限幅放大器、带通滤波器、峰值检波器和整形输出电路组成。
可以利用它作为超声波检测电路。
接收的回波信号先经过前置放大器和限幅放大器,将信号调节到合适的幅值;再经过带通滤波器滤波得到有用信号,滤除干扰信号;最后由峰值检波器和整形电路输出到单片机外部中断口。
CX20106A 的外部接线如图3所示。
图2发射部分电路结构图3接收部分电路结构图图3中1脚是接收信号输入端,2脚是调节接收信号灵敏度,电阻越小,灵敏度越高。
电容越大,灵敏度越高。
电容一般取1uF,电阻50Ω~300Ω的,在干扰较大的场合增加电阻阻值可将灵敏度调低,干扰小的场合减小阻值将灵敏度调高。
5脚是调节中心频率,取200K Ω,7脚接提升电阻取1K 左右。
实验证明接收效果较好,在发射探头连续发射超声波的情况下,障碍物在1m 处接收探头的输入波形用示波器测得如图4所示。
2.4 显示部分 显示部分采用共阴极数码管,由单片机的P0口输出段码,P2口用作为位控,用P NP 型三极管驱动(本设计采用9012),由于单片机I/O 口的驱动能力非常小,P0口需外界提升电阻以增加驱动能力,另一方面要防止低电平时,电流直接经电阻流进I/O 的灌流太大而烧毁单片机,所以提升电阻一般取600Ω左右,实验证明,数码管亮度合适。
其原理图如图5所示。
图4示波器显示回波波形图5数码管动态扫描显示电路为节省单片机硬件资源,采用动态扫描方式显示。
显示时先使第一、第二个数码管截至,第三个数码管饱和导通,然后将个位数段码输出到P0口,接着使第一、第三个数码管截止,使第二个饱和导通,输出十位数段码,再使第二、第三个数码管截止,使第一个饱和导通,输出百位数段码,每位显示点亮时间设为1m s 左右,由于人的视觉暂留和二极管的余晖效应,虽然不是同时点亮,但因为扫描速度非常快,看起来就是一组显示稳定的数据,感觉不到闪烁。
3 系统软件设计测距系统软件采用汇编语言,由发射脉冲子程序,用中断实现回波接收子程序,计算距离子程序,数码管显示子程序和计时单元延时子程序几部分组成,采用模块化编程。
其软件流程图如图6所示。
图6系统软件流程图程序首先初始化需要用到的寄存器,内存单元,设置中断触发方式,然后控制P1.0口输出12us 的高电平,再输出13us 的低电平,循环10次便可发射・55・贺瑞强,王 民:基于AT89S51单片机的超声波测距系统的设计与研究10个频率为40kHz 的脉冲信号。
经过一段延时后,CP U 开放中断,开始计数,将计数器初值设为延时所经过的距离,计数器每过一个计时单元加一。
中断产生,停止计数,最后将计数器中的值经过转换显示到数码管上。
如果计数器中的值小于50就由软件产生一定频率的信号到蜂鸣器报警,并启动报警灯。
当需要所存数据时,由外部中断判断键盘是否按下,通过不断显示上次测量数据来锁定数据。
当检测到键盘再一次按下时,按取消锁存,并继续测量距离。
4 系统优化方案为了使系统得到精确的测量结果,本系统采用以下几种优化方案。
第一、使用硬件优化,在倒车测距系统中,稳定性要比精度重要,为了使系统更加稳定,在系统上装三个超声波换能器,同时检测,将测得的距离作为实际距离显示。
第二、使用软件优化,用软件发射三次超声波,接收三次回波,将三次测量结果中最小值作为实际值。
第三、使用计算优化,将多组测量数据与实际距离进行对比,对数据进行拟合。
得出测量结果与实际结果的关系,然后计算显示。
表1为多次测量所得数据与实际距离的对比。
表1 测量距离和实际距离对比/c m 测量距离S 234285143182252432实际距离L 264082143196252431 为达到一定的精度,构造一个二次函数使其满足L =aS 2+bS +c,此时有L ∈s pan{S 2,S,1}。
最小二乘法拟合后得到函数关系L =0.000112S 2+0.999862S +0.000334,将寄存器中所测的距离按照以上函数关系进行数据处理,最后将处理后的数据输出到数码管显示。
5 结语实验证明,基于AT89S51的单片机倒车测距系统具有工作稳定,精度较高,抗干扰,成本低,性价比高等优点,50c m 以内自动报警。
灵敏度可调,并可手动锁定数据。
本系统的测距分辨率为1c m ,测距范围为10c m ~5m 。
完全满足在倒车测距系统中的要求。
参考文献:[1]杨文龙.单片机原理及应用[M ].西安:西安电子科技大学出版社,2003.[2]刘光斌,刘东,姚志成.单片机系统实用抗干扰技术[M ].北京:人民邮电出版社,2003.[3]王福瑞.单片机微机测控系统设计大全[M ].北京:北京航空航天大学出版社,2002.[4]余永权,李小青,陈林康.单片机应用系统的功率接口技术[M ].北京:北京航空航天大学出版社,2000.[5]廖东民,刘振海.飞机场车辆防撞报警系统的设计与实现[J ].电子技术,2002,(11):55-57.[6]李鸣华,余水宝.单片机在超声波料位测量中的应用[J ].电子技术应用,1998,(9):14-16.[7]史恩秀,黄玉美,闫鹰,等.基于超声波传感器的AG V 定位方法的实验研究[J ].传感器技术,2005,(10):28-30.(责任编辑:王瑞斌)Ultra son i c Rang i n g Syste m Reversi n gD esi gn and Research Ba sed on SCM AT 89S 51HE Rui -qiang,WANG M in(Depart m ent of I nf or mati on and Contr ol Engineering,Xi’an University of A rchitecture andTechnol ogy Xi’an 710055,Shaanxi )Abstract:This paper analyzes the basic p rinci p les of ultras onic distance measure ment,based on this p r oposed de 2sign ideas and t o s olve p r oble m s .This design and the achieve ment is based on SC M AT89S51perfor mance .After calibrati on,its accuracy reaches one c m.Vehicle collisi on avoidance syste m comp letely satisfies the design require 2ments,makes up the m irr or deficiencies .Key words:ultras ound ;AT89S51m icr ocontr oller;range finder・65・榆林学院学报 2009年第2期(总第79期)。